Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА-ПАРТНЕРА, ЛЕЖАЩЕГО В ДРЕЙФЕ
Вид РИД
Изобретение
Изобретение относится к водному транспорту и касается управления швартующимся судном при выполнении им швартовной операции к борту судна-партнера, лежащего в дрейфе.
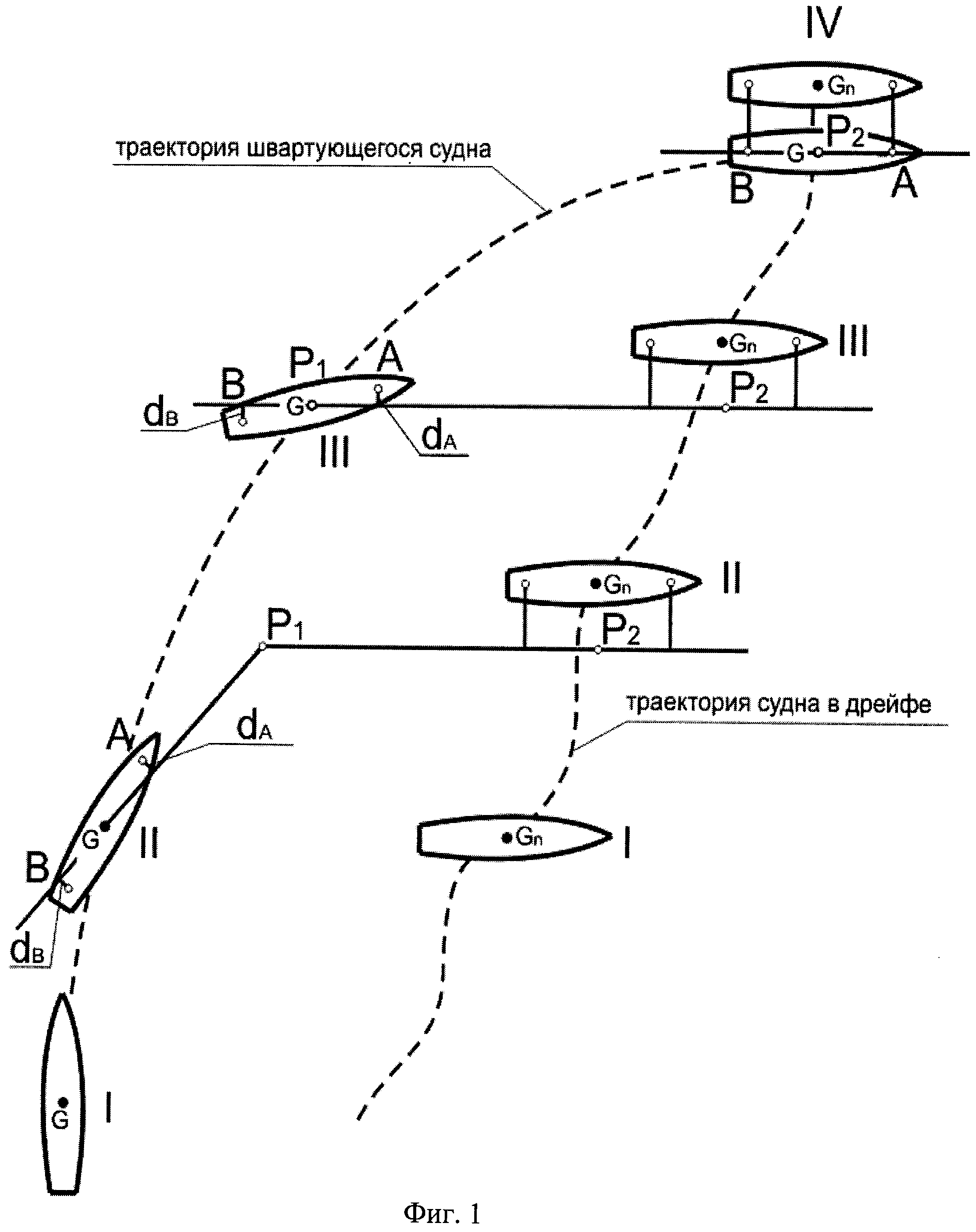
Известен способ управления швартующимся судном при выполнении им швартовной операции к борту судна-партнера (патент №2422326, опубл. 27.06.2011), когда в пределах контуров швартующегося судна и судна-партнера, в их диаметральных плоскостях выбирают по две точки, одна из которых находится в носу А (швартующееся судно), An (судно-партнер), другая - в корме В (швартующееся судно), Bn (судно-партнер) (фиг.1,2) относительно мидель-шпангоута соответствующего судна.
Координаты точек А, В, An, Bn в неподвижной координатной системе определяют непрерывно с высокой точностью (±1,0 м). Используя значения координат точек А(X0A, Y0A), В(X0B, Y0B) швартующегося судна и судна-партнера An(X0An, Y0An), Bn(X0Bn, Y0Bn) в неподвижной координатной системе, координаты тех же точек в подвижных системах координат, связанных с швартующимся судном А(XA, YA), Bn(ХВ, YB) и судном-партнером An(XAn, YAn), Bn(XBn, YBn), координаты центров тяжести (ЦТ) швартующегося судна в связанной с ним подвижной координатной системе G (XG, YG) и судна-партнера в связанной с ним подвижной координатной системе Gn(X0Gn, Y0Gn) (фиг.3), а также значения расстояния между диаметральными плоскостями (ДП) швартующихся судов h0 и расстояния между ЦТ швартующихся судов m, рассчитывают:
- координаты центра тяжести швартующегося судна G(X0G, Y0G) в неподвижной координатной системе;
- координаты центра тяжести судна-партнера Gn(X0Gn, Y0Gn) в неподвижной координатной системе;
- координаты точек  и
и  , расположенных на перпендикулярах к ДП судна-партнера, восстановленных в точки An и Bn;
, расположенных на перпендикулярах к ДП судна-партнера, восстановленных в точки An и Bn;
- координаты проекции ЦТ судна-партнера  в неподвижной координатной системе на траекторию сближения в конечной стадии швартовки, проходящую параллельно ДП судна-партнера через точки
в неподвижной координатной системе на траекторию сближения в конечной стадии швартовки, проходящую параллельно ДП судна-партнера через точки  и
и  ;
;
- координаты второй заданной точки P2(X0P2, Y0P2) в неподвижной координатной системе;
- текущее значение длины тормозного пути швартующегося судна рассчитывают с использованием уравнения его движения dυ/dS=f(υ, C1 C2, C3,…),
где
υ - текущее значение скорости швартующегося судна;
S - путь;
C1, C2, C3,… - текущие значения параметров уравнения движения швартующегося судна, зависящие от текущих значений параметров, характеризующих текущее состояние загрузки судна и внешней среды (водоизмещения швартующегося судна; параметров посадки корпуса; направления и скорости ветра; параметров волнения; направления и скорости течения; глубины акватории в районе выполнения швартовной операции). Текущее значение длины тормозного пути швартующегося судна в процессе его сближения с судном-партнером определяют интегрированием уравнения движения швартующегося судна в пределах от υ=υн до υ=υn, т.е.
где υн - начальная скорость швартующегося судна; υn - скорость судна-партнера.
При этом текущие значения параметров уравнения движения швартующегося судна С1, С2, С3,… в процессе выполнения швартовной операции непрерывно идентифицируют с использованием метода, описанного в работах [5], [6].
- координаты первой заданной точки P1(X0P1, Y0P1) в неподвижной координатной системе.
Зная координаты первой заданной точки и координаты ЦТ швартующегося судна, определяют текущее положение траектории сближения, проходящей через первую заданную точку P1(X0P1 Y0P1) и ЦТ швартующегося судна G(X0G, Y0G). После этого определяют поперечные смещения точек A и B от найденной указанным способом траектории сближения.
Непрерывно определяемые значения координат точек A и B, An и Bn позволяют непрерывно вычислять координаты ЦТ швартующегося судна G, а вместе с непрерывно определяемым текущим значением длины тормозного пути ST - и первой заданной точки P1; а также поперечные смещения dA и dB точек A и B швартующегося судна от текущего положения траектории сближения.
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например руля швартующегося судна, по закону:
α=-kA×dA+kB×dB,
где kA, kB - коэффициенты усиления по перечным смещениям носовой и кормовой точек швартующегося судна от текущего положения траектории сближения.
Таким образом, швартующееся судно движется по линии GP1 в направлении точки P1.
В момент выхода швартующегося судна в первую заданную точку, что соответствует равенству координат ЦТ швартующегося судна G(X0G, Y0G) и координат первой заданной точки P1(X0G, Y0P1) (X0G=Х0Р1; Y0G=Y0P1), оно переходит к сближению со второй заданной точкой P2, при этом текущее положение траектории сближения соответствует положению линии, проходящей через точки
и
, координаты которых рассчитывают непрерывно. Текущие координаты второй заданной точки P2(Х0Р2, Y0P2), лежащей на линии  вычисляют также непрерывно.
вычисляют также непрерывно.
Постоянно определяемые значения координат точек A и B, An и Bn позволяют непрерывно вычислять: координаты точек  и
и  , ЦТ G швартующегося судна и ЦТ Gn судна-партнера, второй заданной точки P2 в неподвижной координатной системе, а также поперечные смещения dA и dB точек A и B швартующегося судна от текущего положения траектории сближения, которой является линия
.
, ЦТ G швартующегося судна и ЦТ Gn судна-партнера, второй заданной точки P2 в неподвижной координатной системе, а также поперечные смещения dA и dB точек A и B швартующегося судна от текущего положения траектории сближения, которой является линия
.
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например руля швартующегося судна, по известному закону. Таким образом, швартующееся судно движется в точку Р2 по линии
.
Момент выхода швартующегося судна во вторую заданную точку P2 соответствует равенству координат ЦТ швартующегося судна и второй заданной точки, то есть X0G=X0P2, Y0G=Y0P2.
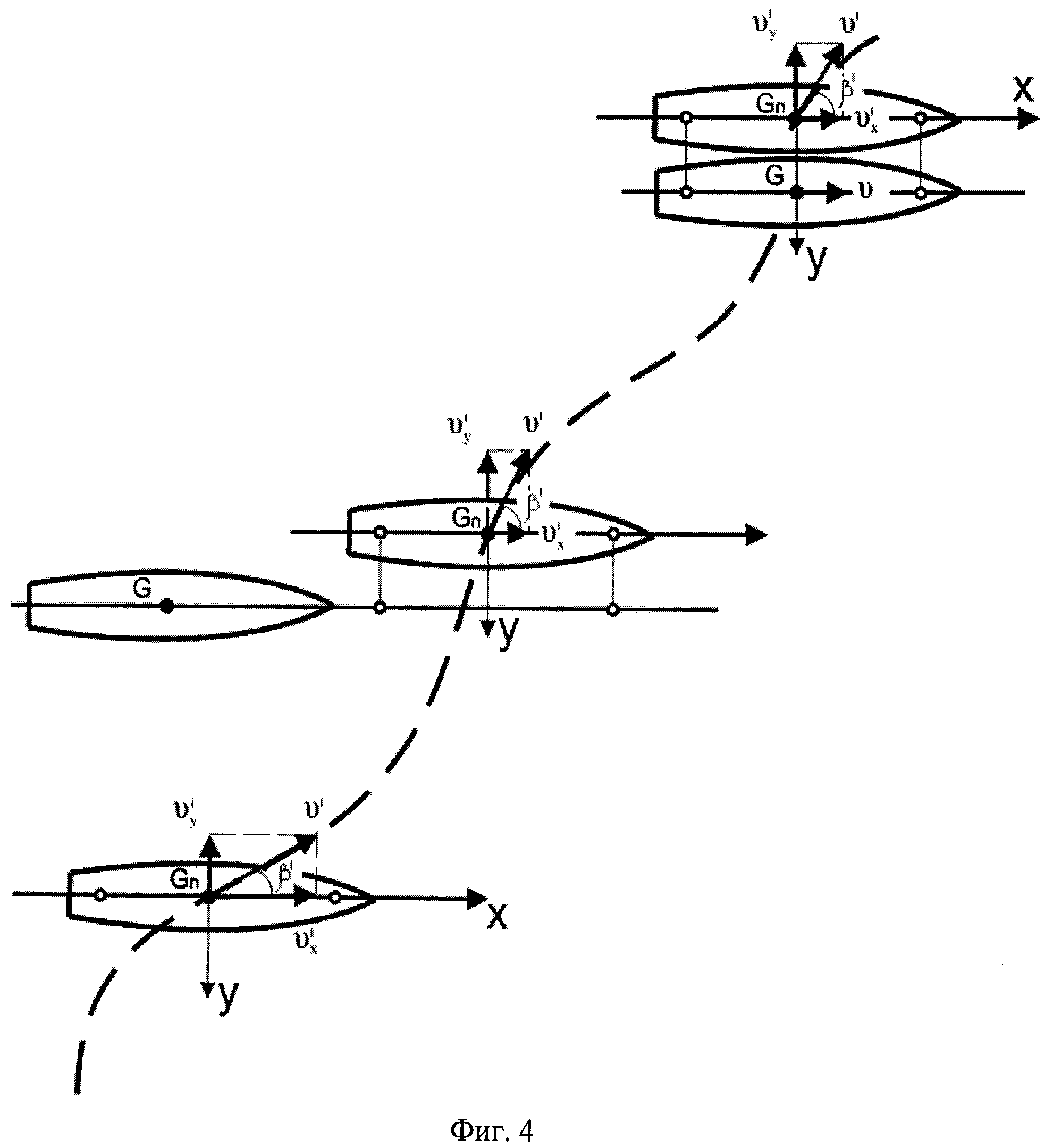
Однако в этом способе управления судном, выполняющим швартовную операцию к борту судна-партнера, есть определенный недостаток, не позволяющий безопасно сблизиться швартующемуся судну с судном-партнером, если оно лежит в дрейфе. Направление вектора линейной скорости дрейфующего судна υ' определяется углом дрейфа β' (угол между диаметральной плоскостью судна и вектором линейной скорости судна) (фиг.4), а величина β' может достигать больших значений в пределах от 0 до 180° [1], [3], [4]. Таким образом, в момент выхода швартующегося судна к борту судна-партнера, лежащего в дрейфе, линейная скорость швартующегося судна и должна быть равна продольной составляющей линейной скорости швартующего судна  , то есть
, то есть  .
.
Технический результат, на достижение которого направлено заявляемое изобретение, состоит в соблюдении условия движения швартующегося судна в конечной стадии швартовки со скоростью, равной продольной составляющей линейной скорости судна-партнера.
Для достижения указанного технического результата в способе управления швартующимся судном, при выполнении им швартовной операции к борту судна-партнера, когда в пределах контуров швартующегося судна и судна-партнера, в их диаметральных плоскостях выбирают по две точки, одна из которых находится в носу A (швартующееся судно), An (судно-партнер), другая - в корме B (швартующееся судно), Bn (судно-партнер) (фиг.2) относительно мидель-шпангоута соответствующего судна.
Координаты точек A, B, An, Bn в неподвижной координатной системе определяют непрерывно с высокой точностью (±1,0 м). Используя значения координат точек швартующегося судна A(X0A, Y0A), В(X0B, Y0B) и судна-партнера An(X0An, Y0An), Bn(X0Bn, Y0Bn) в неподвижной координатной системе, координаты тех же точек в подвижных системах координат, связанных с швартующимся судном A(ХА, YA), B(XB, YB) и судном-партнером An(XAn, YAn), Bn(XBn,YBn), координаты ЦТ швартующегося судна в связанной с ним подвижной координатной системе G (XG,YG) и судна-партнера в связанной с ним подвижной координатной системе Gn(X0Gn, Y0Gn), а также значения расстояния между ДП швартующихся судов h0 и расстояния между ЦТ швартующихся судов m, рассчитывают:
- координаты центра тяжести швартующегося судна G (X0G, Y0G) в неподвижной координатной системе;
- координаты центра тяжести судна-партнера Gn(X0Gn, Y0Gn) в неподвижной координатной системе;
- координаты точек
и
, расположенных на перпендикулярах к ДП судна-партнера, восстановленных в точки An и Bn;
- координаты проекции ЦТ судна-партнера
в неподвижной координатной системе на траекторию сближения в конечной стадии швартовки, проходящую параллельно ДП судна-партнера через точки  и
и  ;
;
- координаты второй заданной точки P2(X0P2, Y0P2) в неподвижной координатной системе;
- текущее значение длины тормозного пути швартующегося судна рассчитывают с использованием уравнения его движения dυ/dS=f(υ, C1, C2, C3,…),
где
υ - текущее значение скорости швартующегося судна;
S - путь;
C1, C2, C3,… - текущие значения параметров уравнения движения швартующегося судна, зависящие от текущих значений параметров, характеризующих текущее состояние загрузки судна и внешней среды (водоизмещения швартующегося судна; параметров посадки корпуса; направления и скорости ветра; параметров волнения; направления и скорости течения; глубины акватории в районе выполнения швартовной операции).
Отличительным признаком предлагаемого способа от указанного выше известного, наиболее близкого к нему, является следующий:
дополнительно текущее значение длины тормозного пути швартующегося судна в процессе его сближения с судном-партнером определяют интегрированием уравнения движения швартующегося судна в пределах от υ=υн до  , т.е.
, т.е.

где  - продольная составляющая линейной скорости швартующего судна.
- продольная составляющая линейной скорости швартующего судна.
При этом текущие значения параметров уравнения движения швартующегося судна C1, C2, С3,… в процессе выполнения швартовной операции непрерывно идентифицируют с использованием метода, описанного в работах [5], [6];
- координаты первой заданной точки P1(X0P1, Y0P1) в неподвижной координатной системе.
Зная координаты первой заданной точки и координаты ЦТ швартующегося судна, определяют текущее положение траектории сближения, проходящей через первую заданную точку Р1(X0P1, Y0P1) и ЦТ швартующегося судна G(X0G, Y0G). После этого определяют поперечные смещения точек A и B от найденной указанным способом траектории сближения.
Постоянно определяемые значения координат точек A и B, An и Bn позволяют непрерывно вычислять координаты ЦТ швартующегося судна G, а вместе с непрерывно определяемым текущим значением длины тормозного пути ST - и первой заданной точки P1, а также поперечные смещения dA и dB точек A и B швартующегося судна от текущего положения траектории сближения.
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например руля швартующегося судна, по закону:
α=-kA×dA+kB×dB,
где kA, kB - коэффициенты усиления по перечным смещениям носовой и кормовой точек швартующегося судна от текущего положения траектории сближения.
Таким образом, швартующееся судно движется по линии GP1 в направлении точки P1.
В момент выхода швартующегося судна в первую заданную точку, что соответствует равенству координат ЦТ швартующегося судна G(X0G, Y0G) и координат первой заданной точки P1(X0G, Y0P1) (X0G=Х0Р1; Y0G=Y0P1), оно переходит к сближению со второй заданной точкой P2, при этом текущее положение траектории сближения соответствует положению линии, проходящей через точки
и
, координаты которых рассчитывают непрерывно. Текущие координаты второй заданной точки P2(X0P2, Y0P2), лежащей на линии
, вычисляют также непрерывно.
Постоянно определяемые значения координат точек A и B, An и Bn позволяют непрерывно вычислять: координаты точек  и
и  , ЦТ G швартующегося судна и ЦТ Gn судна-партнера, второй заданной точки Р2 в неподвижной координатной системе, а также поперечные смещения dA и dB точек A и B швартующегося судна от текущего положения траектории сближения, которой является линия
.
, ЦТ G швартующегося судна и ЦТ Gn судна-партнера, второй заданной точки Р2 в неподвижной координатной системе, а также поперечные смещения dA и dB точек A и B швартующегося судна от текущего положения траектории сближения, которой является линия
.
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например руля швартующегося судна, по известному закону. Таким образом, швартующееся судно движется в точку P2 по линии
.
Момент выхода швартующегося судна во вторую заданную точку P2 соответствует равенству координат ЦТ швартующегося судна и второй заданной точки, то есть X0G=Х0Р2, Y0G=Y0P2.
Предлагаемый способ управления судном при выполнении им швартовной операции к борту судна-партнера, лежащего в дрейфе, осуществляют следующим образом.
В пределах контуров швартующегося судна и судна-партнера, лежащего в дрейфе, в их диаметральных плоскостях выбирают по две точки, одна из которых находится в носу A (швартующееся судно), An (судно-партнер, лежащее в дрейфе), другая - в корме B (швартующееся судно), Bn (судно-партнер, лежащее в дрейфе) (фиг.2) относительно мидель-шпангоута соответствующего судна.
Координаты точек A, B, An, Bn в неподвижной координатной системе определяют непрерывно с высокой точностью (±1,0 м). Используя значения координат точек швартующегося судна A(Х0А, Y0A), B(Х0В, Y0B) и судна-партнера, лежащего в дрейфе An(X0An, Y0An), Bn(X0Bn, Y0Bn) в неподвижной координатной системе, координаты тех же точек в подвижных системах координат, связанных с швартующимся судном A(XA, YB, В(XB, YB) и судном-партнером, лежащим в дрейфе An(XAn, YAn) Bn(XBn,YBn), координаты ЦТ швартующегося судна в связанной с ним подвижной координатной системе G(XG,YG) и судна-партнера, лежащего в дрейфе в связанной с ним подвижной координатной системе Gn(X0Gn, Y0Gn), а также значения расстояния между ДП швартующихся судов h0 и расстояния между ЦТ швартующихся судов m, рассчитывают:
- координаты центра тяжести швартующегося судна G(X0G, Y0G) в неподвижной координатной системе;
- координаты центра тяжести судна-партнера, лежащего в дрейфе Gn(X0Gn, Y0Gn) в неподвижной координатной системе;
- координаты точек
и
, расположенных на перпендикулярах к ДП судна-партнера, лежащего в дрейфе, восстановленных в точки An и Bn;
- координаты проекции ЦТ судна-партнера, лежащего в дрейфе
в неподвижной координатной системе на траекторию сближения в конечной стадии швартовки, проходящую параллельно ДП судна-партнера, лежащего в дрейфе через точки
;
- координаты второй заданной точки P2(X0P2, Y0P2) в неподвижной координатной системе;
- текущее значение длины тормозного пути швартующегося судна рассчитывают с использованием уравнения его движения dυ/dS=f(υ, C1, C2, C3,…),
где
υ - текущее значение скорости швартующегося судна;
S - путь;
C1 C2, C3,… - текущие значения параметров уравнения движения швартующегося судна, зависящие от текущих значений параметров, характеризующих текущее состояние загрузки судна и внешней среды (водоизмещения швартующегося судна; параметров посадки корпуса; направления и скорости ветра; параметров волнения; направления и скорости течения; глубины акватории в районе выполнения швартовной операции).
Текущее значение длины тормозного пути швартующегося судна в процессе его сближения с судном-партнером, лежащим в дрейфе, определяют интегрированием уравнения движения швартующегося судна в пределах от υ=υн до  , т.е.
, т.е.
где  - продольная составляющая линейной скорости швартующего судна.
- продольная составляющая линейной скорости швартующего судна.
При этом текущие значения параметров уравнения движения швартующегося судна C1, C2, C3,… в процессе выполнения швартовной операции непрерывно идентифицируют с использованием метода, описанного в работах [5], [6];
- координаты первой заданной точки P1(X0P1, Y0P1) в неподвижной координатной системе.
Зная координаты первой заданной точки и координаты ЦТ швартующегося судна, определяют текущее положение траектории сближения, проходящей через первую заданную точку P1(X0P1, Y0P1) и ЦТ швартующегося судна G(X0G, Y0G). После этого определяют поперечные смещения точек A и B от найденной указанным способом траектории сближения.
Непрерывно определяемые значения координат точек A и B, An и Bn позволяют непрерывно вычислять координаты ЦТ швартующегося судна G, а вместе с непрерывно определяемым текущим значением длины тормозного пути ST - и первой заданной точки P1, а также поперечные смещения dA и dB точек A и B швартующегося судна от текущего положения траектории сближения.
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например руля швартующегося судна, по закону:
α=-kA×dA+kB×dB, где kA, kB - коэффициенты усиления по перечным смещениям носовой и кормовой точек швартующегося судна от текущего положения траектории сближения.
Таким образом, швартующееся судно движется по линии GP1 в направлении точки P1.
В момент выхода швартующегося судна в первую заданную точку, что соответствует равенству координат ЦТ швартующегося судна G(X0G, Y0G) и координат первой заданной точки P1(X0G, Y0P1) (X0G=X0P1; Y0G=Y0P1), оно переходит к сближению со второй заданной точкой P2, при этом текущее положение траектории сближения соответствует положению линии, проходящей через точки
и
, координаты которых рассчитывают непрерывно. Текущие координаты второй заданной точки P2(X0P2, Y0P2), лежащей на линии
, вычисляют непрерывно.
Непрерывно определяемые значения координат точек A и B, An и Bn позволяют непрерывно вычислять: координаты точек  и
и  , ЦТ швартующегося судна G и ЦТ судна-партнера, лежащего в дрейфе Gn, второй заданной точки P2 в неподвижной координатной системе, а также поперечные смещения dA и dB точек A и B швартующегося судна от текущего положения траектории сближения, которой является линия
.
, ЦТ швартующегося судна G и ЦТ судна-партнера, лежащего в дрейфе Gn, второй заданной точки P2 в неподвижной координатной системе, а также поперечные смещения dA и dB точек A и B швартующегося судна от текущего положения траектории сближения, которой является линия
.
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например руля швартующегося судна, по известному закону. Таким образом, швартующееся судно движется в точку P2 по линии
.
Моменту выхода швартующегося судна во вторую заданную точку P2 соответствует равенство координат ЦТ швартующегося судна и второй заданной точки, то есть X0G=Х0Р2, Y0G=Y0P2.
В результате применения данного изобретения достигается возможность получения технического результата - соблюдение безопасности выполнения швартовной операции к борту судна-партнера, лежащего в дрейфе.
Список литературы
1. Дмитриев, В.И. Справочник капитана: справочник / В.И. Дмитриев. - Москва: Элмор, 2009. - 797 с: ил.
2. Патент №2422326 Российская Федерация, МПК8 B63H 25/00. Способ управления судном при выполнении им швартовной операции к борту судна-партнера, заявитель и патентообладатель Мурм. гос.техн. ун-т. - 2010116539/11; заявл.26.04.2010; опубл. 27.06.2011.
3. Снопков, В.И. Управление судном: учебник / В.И.Снопков. - Москва: Транспорт, 1991. - 359 с.: ил.
4. Цурбан, А.И. Швартовные операции морских судов. / А.И. Цурбан, A.M. Оганов. - М: Транспорт, 1987. - 176 с: ил.
5. Юдин Ю.И. Синтез моделей механизма предвидения для экспертных систем, обеспечивающих безопасную эксплуатацию судна: монография / Ю.И.Юдин. - Мурманск: Изд-во МГТУ, 2007. - 198 с: ил.
6. Юдин, Ю.И. Теоретические основы безопасных способов маневрирования при выполнении точечной швартовки: монография / Ю.И.Юдин, СВ.Пашенцев, Г.И.Мартюк, А.Ю.Юдин. - Мурманск: Изд-во МГТУ, 2009. - 152 с.: ил.
Способ управления судном при выполнении им швартовной операции к борту судна-партнера, лежащего в дрейфе, когда в пределах контуров швартующегося судна и судна-партнера, в их диаметральных плоскостях выбирают по две точки, одна из которых находится в носу A (швартующееся судно), A(судно-партнер), другая - в корме B (швартующееся судно), B(судно-партнер) относительно мидель-шпангоута соответствующего судна, координаты точек A, B, A, B в неподвижной координатной системе определяют непрерывно с высокой точностью (±1,0 м), используя значения координат точек швартующегося судна A (X, Y), B (X, Y) и судна-партнера, лежащего в дрейфе A(X, Y), B(X Y) в неподвижной координатной системе, координаты тех же точек в подвижных системах координат, связанных с швартующимся судном A (X, Y), B (X, Y) и судном-партнером, лежащим в дрейфе A(X, Y), B(X, Y), координаты ЦТ швартующегося судна в связанной с ним подвижной координатной системе G (X,Y) и судна-партнера, лежащего в дрейфе в связанной с ним подвижной координатной системе G (X, Y), а также значения расстояния между ДП швартующихся судов h и расстояния между ЦТ швартующихся судов m, рассчитывают:- координаты центра тяжести швартующегося судна G (X, Y) в неподвижной координатной системе;- координаты центра тяжести судна-партнера, лежащего в дрейфе G(X, Y) в неподвижной координатной системе;- координаты точек и , расположенных на перпендикулярах к ДП судна-партнера, лежащего в дрейфе, восстановленных в точки A и B;- координаты проекции ЦТ судна-партнера, лежащего в дрейфе в неподвижной координатной системе на траекторию сближения в конечной стадии швартовки, проходящую параллельно ДП судна-партнера, лежащего в дрейфе через точки и ;- координаты второй заданной точки P(X, Y) в неподвижной координатной системе;- текущее значение длины тормозного пути швартующегося судна рассчитывается с использованием уравнения его движенияdυ/dS=f(υ, C, C, C,…),где υ - текущее значение скорости швартующегося судна;S - путь;C, C, C,… - текущие значение параметров уравнения движения швартующегося судна, зависящие от текущих значений параметров, характеризующих текущее состояние загрузки судна и внешней среды (водоизмещения швартующегося судна; параметров посадки корпуса; направления и скорости ветра; параметров волнения; направления и скорости течения; глубины акватории в районе выполнения швартовной операции), отличающийся тем, что текущее значение длины тормозного пути швартующегося судна в процессе его сближения с судном-партнером определяют интегрированием уравнения движения швартующегося судна в пределах от υ=υ до , т.е. где - продольная составляющая линейной скорости швартующего судна, при этом текущие значения параметров уравнения движения швартующегося судна C, C, C,… в процессе выполнения швартовной операции непрерывно идентифицируют;- координаты первой заданной точки P(X, Y) в неподвижной координатной системе, зная координаты первой заданной точки и координаты ЦТ швартующегося судна, определяют текущее положение траектории сближения, проходящей через первую заданную точку P(X, Y) и ЦТ швартующегося судна G (X, Y), после этого определяют поперечные смещения точек A и B от найденной траектории сближения, непрерывно определяемые значения координат точек A и B, A и B позволяют непрерывно вычислять координаты ЦТ швартующегося судна G, а вместе с непрерывно определяемым текущим значением длины тормозного пути S - и первой заданной точки P, а также поперечные смещения d и d точек A и B швартующегося судна от текущего положения траектории сближения, возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, швартующееся судно движется по линии GP в направлении точки P в момент выхода швартующегося судна в первую заданную точку, что соответствует равенству координат ЦТ швартующегося судна G (X, Y) и координат первой заданной точки P(X, Y) (X=X; Y=Y), оно переходит к сближению со второй заданной точкой Р, при этом текущее положение траектории сближения соответствует положению линии, проходящей через точки и , координаты которых рассчитывают непрерывно. Текущие координаты второй заданной точки P(X, Y), лежащей на линии , вычисляют непрерывно; непрерывно определяемые значения координат точек A и B, A и B позволяют непрерывно вычислять: координаты точек и , ЦТ швартующегося судна G и ЦТ судна-партнера, лежащего в дрейфе G, второй заданной точки P в неподвижной координатной системе, а также поперечные смещения d и d точек A и B швартующегося судна от текущего положения траектории сближения, которой является линия ; возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, швартующееся судно движется в точку P по линии ; момент выхода швартующегося судна во вторую заданную точку P соответствует равенству координат ЦТ швартующегося судна и второй заданной точки, то есть X=X, Y=Y.





Способ управления судном при выполнении им швартовной операции к борту судна партнера
Способ определения гидродинамических параметров математической модели судна
Способ определения поперечной гидродинамической силы и ее момента при выполнении сложного маневрирования судна
Способ управления траекторией движения судна
Способ определения демпфирующих составляющих нормальной гидродинамической силы и момента
Способ управления движущимся судном
Способ управления судном при выполнении им швартовной операции к борту судна партнера, стоящего на якоре
Способ определения поперечной гидродинамической силы, образующейся на корпусе судна при выполнении сложного маневрирования
Способ управления движением судна по заданной траектории
Способ управления движущимся судном
Способ управления судном при выполнении им швартовной операции к борту судна партнера
Электрохимический способ очистки хондроитина сульфата
Вантовая ветроэнергетическая установка
Способ определения местоположения объекта
Способ определения гидродинамических параметров математической модели судна
Способ получения консервов из рыбы полугорячего копчения
Способ определения поперечной гидродинамической силы и ее момента при выполнении сложного маневрирования судна
Способ управления траекторией движения судна
Способ извлечения никеля
Способ квазитрансавроральной радиосвязи в дкмв-диапазоне

