Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ГИДРОДИНАМИЧЕСКИХ ПАРАМЕТРОВ МАТЕМАТИЧЕСКОЙ МОДЕЛИ СУДНА
Вид РИД
Изобретение
Изобретение относится к области судовождения и может быть использовано для прогнозирования движения судна при маневрировании.
Известен способ определения гидродинамических параметров математической модели судна (Пат. РФ №2442718, опубл. 20.02.2012), основанный на измерении с помощью приемников спутниковой навигационной системы с дифференциальными поправками в реальном масштабе времени координат двух определенным образом разнесенных в диаметральной плоскости по длине судна точек, условно названных носовой и кормовой, и определении, с использованием данных измерений текущих координат этих точек, текущих значений кинематических параметров движения судна:
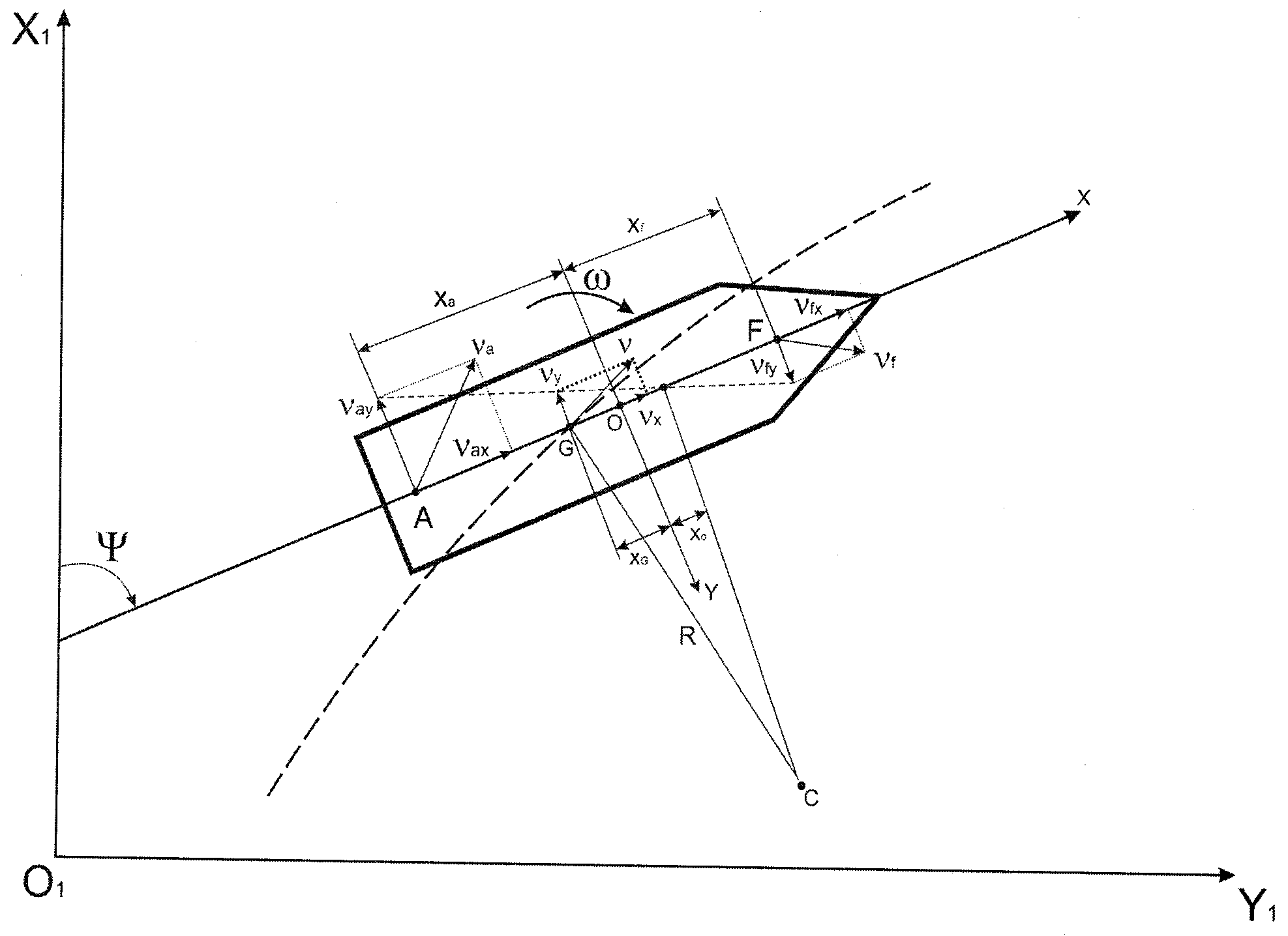
- линейных скоростей носовой F (υf) и кормовой A (υa) точек и их проекций на продольную X (υxf, υха) и поперечную Y (υyf, υya) координатные оси подвижной системы координат ZXОY, связанной с судном;
- абсциссы центра вращения (хо) в системе координат ZXОY;
- проекции вектора линейной скорости в центре тяжести на поперечную ось Y (υy);
- линейной скорости центра тяжести судна (υ);
- радиуса кривизны траектории ЦТ судна (R);
- угловой скорости судна (ω),
которые используют для вычисления текущих значений гидродинамических параметров математической модели судна, на базе которой выполняют компьютерное моделирование с целью прогнозирования движения судна при маневрировании. Данный способ наиболее близок к предлагаемому и принят за прототип.
Недостатком данного способа является то, что для определения кинематических параметров движения судна приходится прибегать к численному дифференцированию параметров, измеренных с помощью спутниковой навигационной системы, что приводит к снижению точности результатов расчета кинематических параметров движения судна. Указанный недостаток становится более существенным, если точность измерения координат носовой и кормовой точек судна по каким-либо причинам (погодные условия, район плавания и др.) снижается.
Целью предлагаемого способа является исключение отмеченного недостатка при экспериментально-расчетном определении параметров математической модели судна в непрерывном режиме и, как следствие, повышение точности прогнозирования движения судна при выполнении им маневрирования с использованием компьютерного моделирования на базе адекватной математической модели судна.
Технический результат, на достижение которого направлено заявляемое изобретение, состоит в повышении точности прогнозирования движения судна при выполнении им маневрирования.
Для достижения указанного технического результата в способе определения гидродинамических параметров математической модели судна, включающем использование математической модели движения судна, двух разнесенных по длине диаметральной плоскости судна точек носовой F и кормовой A, определение текущих значений кинематических параметров движения судна в подвижной системе координат ZXОY, связанной с судном, и на их основе вычисление текущих гидродинамических параметров математической модели движения судна, компьютерное моделирование движения судна на базе последней, используют датчики ускорений, с их помощью определяют в реальном масштабе времени текущие значения продольных, поперечных и угловых ускорений носовой F (wfx1, wfy1, ε) и кормовой A (wax1, way1, ε) точек в неподвижной системе координат X1O1Y1, на их основе определяют текущие значения кинематических параметров движения судна.
Предлагаемый способ поясняется чертежом.
Способ заключается в следующем. Математическая модель судна, используемая для компьютерного моделирования при прогнозировании движения судна в процессе маневрирования, представляет собой систему дифференциальных уравнений, общий вид которых, с учетом известных условностей [1], [2], [3], [4], [5], следующий:
где υx, υy - проекции вектора линейной скорости в ЦТ судна на продольную ОX и поперечную ОY оси соответственно;
ψ - курс судна;
X1, Y1 - координаты ЦТ судна в неподвижной системе координат X1О1Y1;
C1, С2, С3, … - параметры математической модели, численные значения которых определяют в зависимости от геометрических элементов погруженной части корпуса судна, которые постоянны при данном состоянии загрузки последнего [1], [2], [3], [4], [5].
В процессе движения судна с помощью акселерометров определяют продольные, поперечные и угловые ускорения носовой F(wfx1, wfy1, ε) и кормовой A (wax1, way1, ε) точек судна в неподвижной системе координат X1О1Y1 и рассчитывают продольные и поперечные составляющие линейных скоростей носовой (υfx1, υfy1) и кормовой (υax1, υay1) точек с использованием известных зависимостей:

Далее рассчитывают продольные и поперечные составляющие линейных скоростей носовой F (υfx, υfy) и кормовой A (υax, υay) точек судна в подвижной системе координат ZXОY, связанной с судном, с учетом воздействия на судно течения в районе маневрирования:

где υst - скорость течения;
qst - направление течения.
Очевидно, что продольная составляющая линейной скорости судна в любой заданной точке, расположенной на ДП, будет иметь одно значение, следовательно, можно считать, что

Используя значения абсциссы носовой точки F в системе координат ZXОY (xf) и абсциссы кормовой точки A в той же системе координат (xa), а также поперечные составляющие линейных скоростей в носовой (υfy) и кормовой (υay) точках, определенных с использованием зависимостей (3), рассчитывают абсциссу центра вращения судна (см. чертеж) xo [1], [2], [3], [4], [5] по формуле:

Поперечную составляющую линейной скорости в ЦТ судна определяют по формуле, полученной по чертежу, а именно:

Угловую скорость судна

Текущие значения коэффициентов C1, C2, C3, … рассчитывают в зависимости от геометрических элементов погруженной части корпуса судна, которые постоянны при данном состоянии загрузки последнего [1], [2], [3], [4], [5].
Таким образом, определяют все гидродинамические параметры математической модели судна, входящие в правые части дифференциальных уравнений (1). Вычислив правые части уравнений (1), можно в любой заданный момент времени рассчитать значения параметров, характеризующих движение судна при выполнении маневрирования, а именно υx, υy, ω, ψ, X1, Y1, что позволяет прогнозировать любой маневр до его выполнения с использованием методов компьютерного моделирования.
Литература
1. Басин A.M. Ходкость и управляемость судов / A.M. Басин. - М.
2. Васильев А.В. Управляемость судов: учеб. пособие / А.В.Васильев. - Л.: Судостроение, 1989. - 328 с.
3. Гофман А.Д. Движительно-рулевой комплекс и маневрирование судна: справочник / А.Д. Гофман. - Л.: Судостроение, 1988. - 360 с.
4. Соболев Г.В. Управляемость корабля и автоматизация судовождения / Г.В. Соболев. - Л.: Судостроение, 1976. - 478 с.
5. Справочник по теории корабля. В 3 т. Т.3: Управляемость водоизмещающих судов. Гидродинамика судов с динамическими принципами поддержания / под ред. Я.И. Войткунского. - Л.: Судостроение, 1985. - 544 с.
Способ управления судном при выполнении им швартовной операции к борту судна партнера
Способ определения поперечной гидродинамической силы и ее момента при выполнении сложного маневрирования судна
Способ управления траекторией движения судна
Способ определения демпфирующих составляющих нормальной гидродинамической силы и момента
Способ управления судном при выполнении им швартовной операции к борту судна-партнера, лежащего в дрейфе
Способ управления движущимся судном
Способ управления судном при выполнении им швартовной операции к борту судна партнера, стоящего на якоре
Способ определения поперечной гидродинамической силы, образующейся на корпусе судна при выполнении сложного маневрирования
Способ управления движением судна по заданной траектории
Способ управления движущимся судном
Способ управления судном при выполнении им швартовной операции к борту судна партнера
Электрохимический способ очистки хондроитина сульфата
Вантовая ветроэнергетическая установка
Способ определения местоположения объекта
Способ получения консервов из рыбы полугорячего копчения
Способ определения поперечной гидродинамической силы и ее момента при выполнении сложного маневрирования судна
Способ управления траекторией движения судна
Способ извлечения никеля
Способ квазитрансавроральной радиосвязи в дкмв-диапазоне
Способ определения демпфирующих составляющих нормальной гидродинамической силы и момента

