Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА
Вид РИД
Изобретение
Изобретение относится к водному транспорту и касается управления швартующимся судном при выполнении им швартовной операции к борту судна партнера по величине поперечных смещений двух точек швартующегося судна, носовой А и кормовой В, от текущего положения траектории сближения с судном партнером.
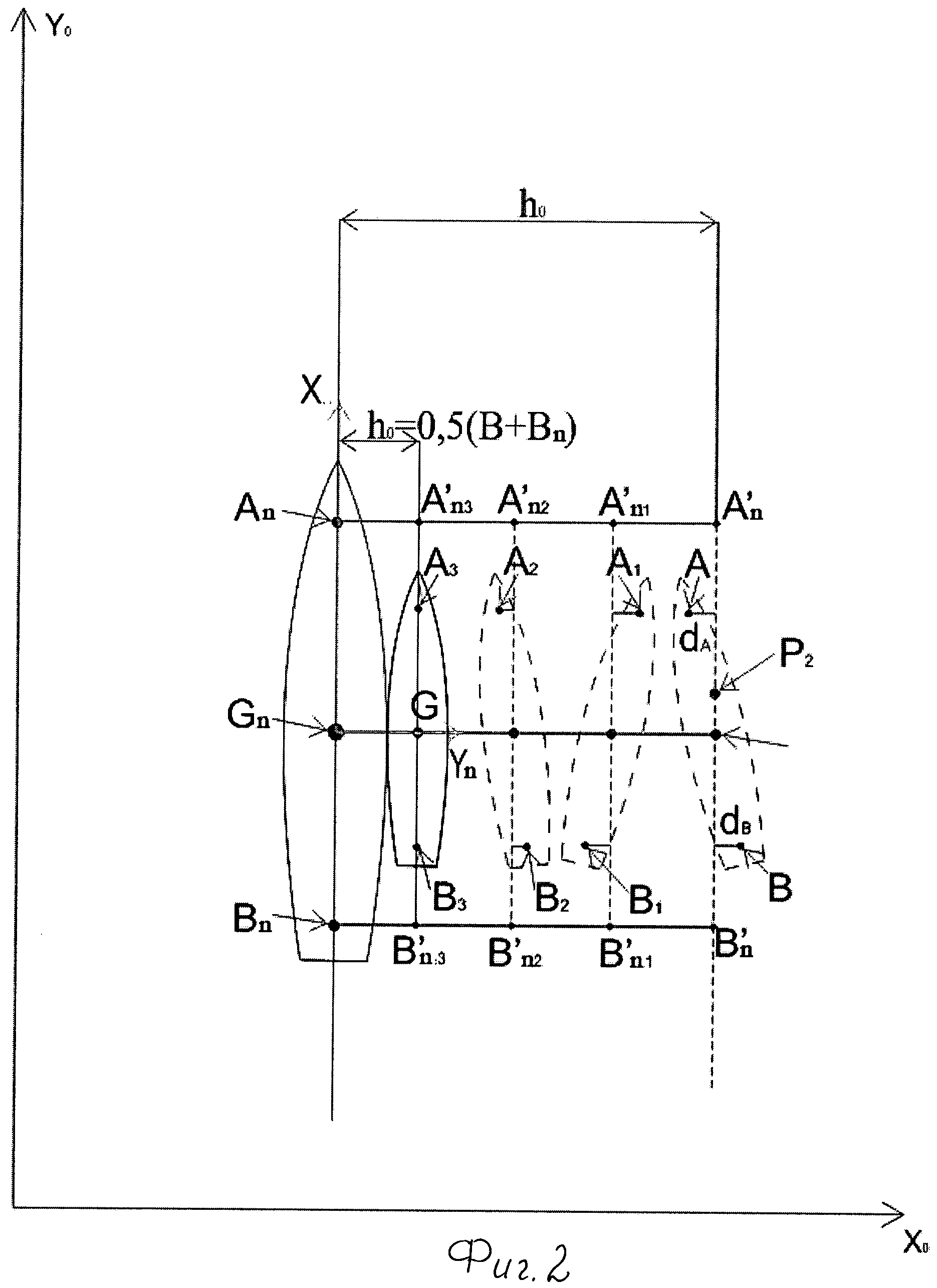
Известен способ управления швартующимся судном при выполнении им швартовной операции к борту судна партнера (патент №2422326, опубл. 27.06.2011), когда в пределах контуров швартующегося судна и судна партнера в их диаметральных плоскостях выбирают по две точки, одна из которых находится в носу А (швартующееся судно), An (судно партнер), другая - в корме В (швартующееся судно), Bn (судно партнер) (Фиг.1) относительно мидель-шпангоута соответствующего судна.
Координаты точек А, В, An, Bn в неподвижной координатной системе определяют непрерывно с высокой точностью (±1,0 м). Используя значения координат точек швартующегося судна A (X0A,Y0A), В (X0B,Y0B) и судна партнера An (X0An,Y0An), Bn (X0Bn,Y0Bn) в неподвижной координатной системе, координаты тех же точек в подвижных системах координат, связанных с швартующимся судном А (XA,YA), В (XB,YB) и судном партнером An (XAn,YAn), Bn (XBn,YBn), координаты центров тяжести (ЦТ) швартующегося судна в связанной с ним подвижной координатной системе G (XG,YG) и судна партнера в связанной с ним подвижной координатной системе Gn (X0Gn,Y0Gn), а также значения расстояния между диаметральными плоскостями (ДП) швартующихся судов h0 и расстояние между ЦТ швартующихся судов m рассчитывают:
- координаты центра тяжести швартующегося судна G (X0G,Y0G) в неподвижной координатной системе;
- координаты центра тяжести судна партнера Gn (X0Gn,Y0Gn) в неподвижной координатной системе;
- координаты точек A'n (XA'n,YA'n) и B'n (XB'n,YB'n), расположенных на перпендикулярах к ДП судна партнера восстановленных в точки An и Bn;
- координаты проекции ЦТ судна партнера C'n (X0G'n,Y0G'n) в неподвижной координатной системе на траекторию сближения в конечной стадии швартовки, проходящую параллельно ДП судна партнера через точки A'n и B'n;
- координаты второй заданной точки P2 (X0P2, Y0P2) в неподвижной координатной системе;
- текущее значение длины тормозного пути Sт;
- координаты первой заданной точки P1 (X0P1,Y0P1) в неподвижной координатной системе.
Зная координаты первой заданной точки и координаты центра тяжести швартующегося судна, определяют текущее положение траектории сближения, проходящей через первую заданную точку P1 (X0P1,Y0P2) и центр тяжести швартующегося судна G (X0G,Y0G). После этого определяют поперечные смещения точек А и В от найденной указанным способом траектории сближения.
Непрерывно определяемые значения координат точек А и В, An и Bn позволяют непрерывно вычислять координаты центра тяжести швартующегося судна G, а вместе с непрерывно определяемым текущим значением длины тормозного пути Sт и первой заданной точки Р1, а также поперечные смещения dA и dB точек А и В швартующегося судна от текущего положения траектории сближения.
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например, руля швартующегося судна, по закону:
α=-kA×dA+kB×dB,
где kA, kB - коэффициенты усиления по перечным смещениям носовой и кормовой точек швартующегося судна от текущего положения траектории сближения.
Таким образом, швартующееся судно движется по линии GP1 в направлении точки P1.
В момент выхода швартующегося судна в первую заданную точку, что соответствует равенству координат центра тяжести швартующегося судна G (X0G,Y0G) и координат первой заданной точки P1 (X0G,Y0P1) (X0G=X0P1; Y0G=Y0P1), оно переходит к сближению со второй заданной точкой Р2, при этом текущее положение траектории сближения соответствует положению линии, проходящей через точки A'n (XA'n,YA'n) и B'n (XB'n,YB'n), координаты которых рассчитываются непрерывно. Текущие координаты второй заданной точки Р2 (X0P2,Y0P2), лежащей на линии A'nB'n, вычисляют непрерывно.
Непрерывно определяемые значения координат точек А и В, An и Bn позволяют непрерывно вычислять координаты точек A'n и B'n, центр тяжести (ЦТ) швартующегося судна G и ЦТ судна партнера Gn, второй заданной точки P2 в неподвижной координатной системе, а также поперечные смещения dA и dB точек А и В швартующегося судна от текущего положения траектории сближения, которой является линия A'nB'n.
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например, руля швартующегося судна, по известному закону. Таким образом, швартующееся судно движется в точку Р2 по линии A'nB'n.
Моментом окончания сближения швартующегося судна с судном партнером считается момент выхода швартующегося судна во вторую заданную точку Р2, что соответствует равенству координат ЦТ швартующегося судна и второй заданной точки, то есть X0G=X0P2, Y0G=Y0P2.
Однако в этом способе управления судном, выполняющим швартовную операцию к борту судна партнера, есть определенный недостаток, не позволяющий безопасно сблизиться швартующемуся судну с судном партнером до непосредственного контакта («борт к борту»), что является непременным условием завершения швартовной операции, итогом которой является соединение швартующихся судов швартовными тросами.
Технический результат, на достижение которого направлено заявляемое изобретение, состоит в соблюдении условия завершения безопасной швартовной операции, т.е. осуществления непосредственного контакта «борт к борту» швартующихся судов.
Для достижения указанного технического результата в способе управления швартующимся судном при выполнении им швартовной операции к борту судна партнера по величинам поперечных смещений расположенных на диаметральной плоскости швартующегося судна его носовой и кормовой точек от текущего положения траектории сближения, включающем два этапа сближения, на первом этапе швартующееся судно выходит в первую заданную точку P1 и центр тяжести швартующегося судна находится в точке P1, на втором этапе швартующееся судно выходит во вторую заданную точку P2 и центр тяжести швартующегося судна находится в точке P2, дополнительно после выхода швартующегося судна в точку P2 осуществляют третий этап дальнейшего сближения швартующихся судов до непосредственного контакта «борт к борту», для этого заданное текущее положение траектории сближения швартующихся судов, линию A'nB'n, постепенно смещают параллельно диаметральной плоскости судна партнера в его сторону со скоростью, не большей допустимого значения скорости поперечного движения υд швартующегося судна в направлении судна партнера, при этом при параллельном смещении линии A'nB'n непрерывно рассчитывают текущее положение точек A'n и B'n линии A'nB'n в зависимости от значения расстояния h между бортами швартующихся судов, причем постепенное уменьшение значения h осуществляют в соответствии с законом
dh/dt=f(υд,h,h0,…), далее процесс смещения линии A'nB'n многократно повторяют и осуществляют его до тех пор, пока расстояние h0 между диаметральными плоскостями швартующихся судов будет равно значению
h0=0,5×(B+Bn),где
В - ширина швартующегося судна, Bn - ширина судна партнера,
что соответствует расстоянию между бортами швартующихся судов, равному нулю h=0. При этом скорость υд определяют исходя из условия безопасного гашения поперечной скорости движения швартующегося судна в момент непосредственного контакта швартующихся судов средствами кранцевой защиты борта судна партнера.
Отличительным признаком предлагаемого способа от указанного выше известного, наиболее близкого к нему, является следующий:
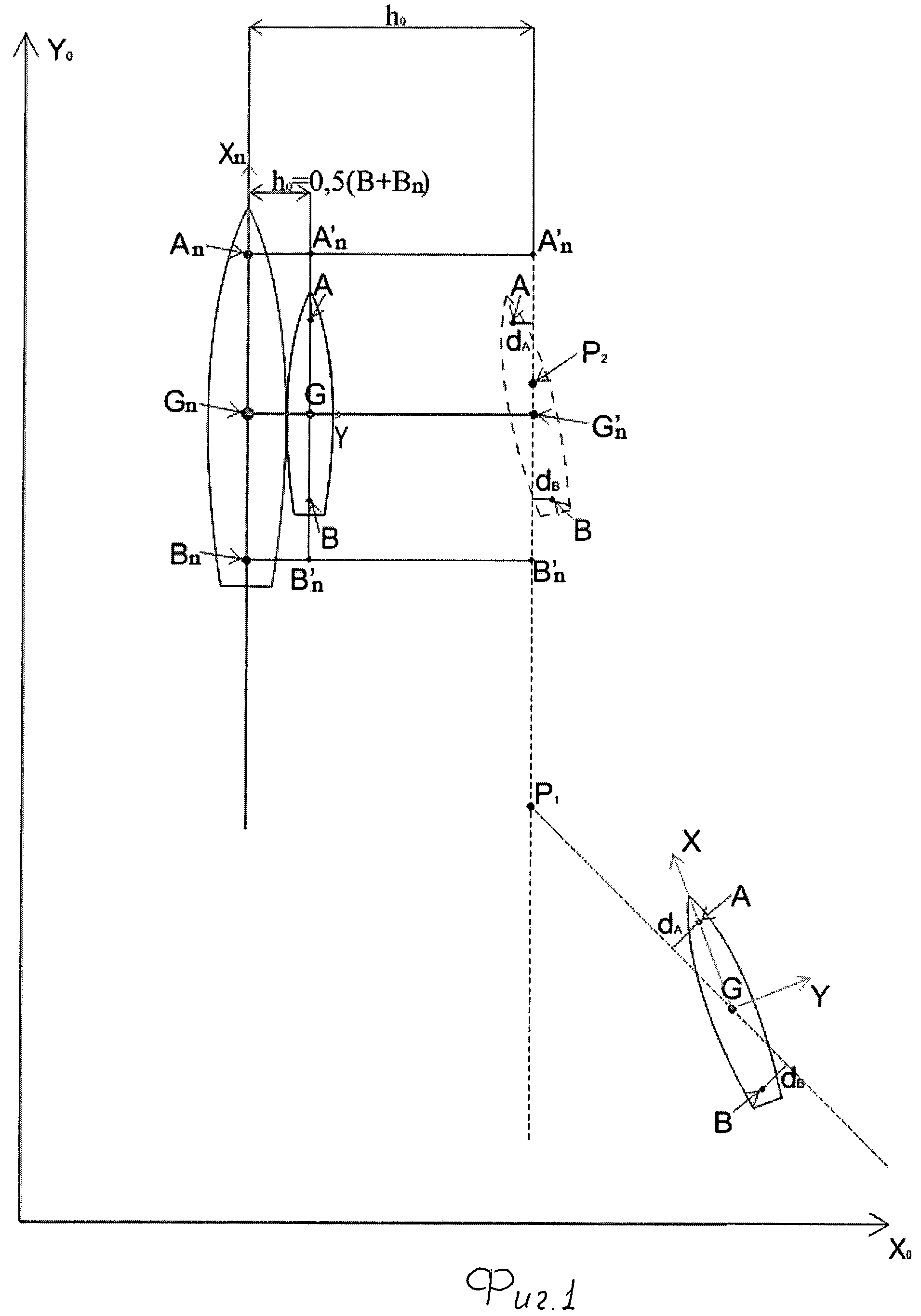
дополнительно после выхода швартующегося судна в точку P2 осуществляют третий этап дальнейшего сближения швартующихся судов до непосредственного контакта «борт к борту» (Фиг.2). С этой целью заданное текущее положение траектории сближения швартующихся судов, т.е. линия A'nB'n, постепенно смещается параллельно ДП судна партнера в сторону судна партнера со скоростью, не большей допустимого значения скорости поперечного движения швартующегося судна в направлении судна партнера υд. Скорость υд определяется исходя из безопасности швартовной операции, а именно из условия безопасного гашения поперечной скорости движения швартующегося судна в момент непосредственного контакта швартующихся судов средствами кранцевой защиты борта судна партнера. Параллельное смещение линии A'nB'n в сторону судна партнера обусловлено смещением точек A'n и B'n, текущее положение которых рассчитывается непрерывно в зависимости от значения расстояния h между бортами швартующихся судов. Постепенное уменьшение значения h в соответствии с законом
dh/dt=f(υд,h,h0,…)
приводит к изменению значения задаваемого расчетным способом расстояния между ДП швартующихся судов h0=0,5×(В+Bn), где
В - ширина швартующегося судна, Bn - ширина судна партнера,
что, в свою очередь, изменяет координаты точек A'n и B'n и в конечном итоге линия A'nB'n смещается в сторону судна партнера, оставаясь параллельной его ДП.
Смещение линии A'nB'n от исходного положения в сторону судна партнера образует смещение dA, dB носовой А и кормовой В точек швартующегося судна соответственно. Формируется сигнал управления α=-kA×dA+kB×dB, и ДП швартующегося судна приводится к новому положению линии A'nB'n до их полного совпадения. Далее процесс смещения линии A'nB'n по указанному алгоритму в сторону судна партнера будет повторяться многократно, также многократно будут образовываться смещения носовой dA и кормовой dB точек швартующегося судна относительно текущего положения линии A'nB'n. Смещения носовой А и кормовой точек В швартующегося судна относительно текущего положения линии A'nB'n будет приводить к формированию управляющего сигнала средства управления швартующимся судном. Работа средства управления вернет ДП швартующегося судна на линию, совпадающую с текущим положением линии A'nB'n.
Смещение линии A'nB'n, в сторону судна партнера будет происходить до тех пор, пока расстояние h0 между ДП швартующихся судов не будет равно значению, определяемому из выражения h0=0,5×(В+Bn), т.е. в этот момент расстояние между бортами швартующихся судов будет равно нулю h=0. Указанный момент в предлагаемом способе управления судном при выполнении им швартовной операции к борту судна партнера считается моментом окончания швартовной операции.
Предлагаемый способ управления судном при выполнении им швартовной операции к борту судна партнера иллюстрируется чертежами, представленными на фиг.1, 2.
На фиг.1 представлены два этапа сближения швартующихся судов по способу-прототипу, на фиг.2 - третий этап сближения швартующихся судов.
Предлагаемый способ управления судном при выполнении им швартовной операции к борту судна партнера осуществляется следующим образом.
В пределах контуров швартующегося судна и судна партнера, в их диаметральных плоскостях выбирают по две точки, одна из которых находится в носу А (швартующееся судно), An (судно партнер), другая - в корме В (швартующееся судно), Bn (судно партнер) относительно мидель-шпангоута соответствующего судна.
Координаты точек А, В, An, Bn в неподвижной координатной системе определяют непрерывно с высокой точностью (±1,0 м). Используя значения координат точек швартующегося судна А (X0A,Y0A), В (X0B,Y0B) и судна партнера An (Y0An,Y0An), Bn (X0An,Y0Bn) в неподвижной координатной системе, координаты тех же точек в подвижных системах координат, связанных с швартующимся судном А (XA,YA), В (XB,YB) и судном партнером An (XAn,YAn), Bn (XBn,YBn), координаты центров тяжести (ЦТ) швартующегося судна в связанной с ним подвижной координатной системе G (XG,YG) и судна партнера в связанной с ним подвижной координатной системе Gn (X0Gn,Y0Gn), а также значения расстояния между диаметральными плоскостями (ДП) швартующихся судов h0 и расстояние между ЦТ швартующихся судов m рассчитывают:
- координаты центра тяжести швартующегося судна G (X0G,Y0G) в неподвижной координатной системе;
- координаты центра тяжести судна партнера Gn (X0Gn,Y0Gn) в неподвижной координатной системе;
- координаты точек A'n (XA'n,YA'n) и B'n (XB'n,YB'n), расположенных на перпендикулярах к ДП судна партнера восстановленных в точки An и Bn,
- координаты проекции ЦТ судна партнера C'n (X0G'n,Y0G'n) в неподвижной координатной системе на траекторию сближения в конечной стадии швартовки, проходящую параллельно ДП судна партнера через точки A'n и B'n,
- координаты второй заданной точки Р2 (X0P2,Y0P2) в неподвижной координатной системе;
- текущее значение длины тормозного пути Sт;
- координаты первой заданной точки Р1 (X0P1,Y0P1) в неподвижной координатной системе.
Зная координаты первой заданной точки и координаты ЦТ швартующегося судна, определяют текущее положение траектории сближения, проходящей через первую заданную точку P1 (X0P1,Y0P1) и ЦТ швартующегося судна G (X0G,Y0G). После этого определяют поперечные смещения точек А и В от найденной указанным способом траектории сближения.
Непрерывно определяемые значения координат точек А и В, An и Bn позволяют непрерывно вычислять координаты ЦТ швартующегося судна G, а в месте с непрерывно определяемым текущим значением длины тормозного пути Sт и первой заданной точки P1, а также поперечные смещения dA и dB точек А и В швартующегося судна от текущего положения траектории сближения.
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например, руля швартующегося судна, по закону:
α=-kA×dA+kB×dB,
где kA, kB - коэффициенты усиления по перечным смещениям носовой и кормовой точек швартующегося судна от текущего положения траектории сближения.
Таким образом, швартующееся судно движется по линии GP1 в направлении точки P1.
В момент выхода швартующегося судна в первую заданную точку, что соответствует равенству координат ЦТ швартующегося судна G (X0G,Y0G) и координат первой заданной точки P1 (X0G,Y0P1) (X0G=X0P1, Y0G=Y0P1), оно переходит к сближению со второй заданной точкой P2, при этом текущее положение траектории сближения соответствует положению линии, проходящей через точки A'n (XA'n,YA'n) и B'n (XB'n,YB'n), координаты которых рассчитываются непрерывно. Текущие координаты второй заданной точки Р2 (X0P2,Y0P2), лежащей на линии A'nB'n, вычисляются непрерывно.
Непрерывно определяемые значения координат точек А и В, An и Bn позволяют непрерывно вычислять: координаты точек A'n и B'n, ЦТ швартующегося судна G и ЦТ судна партнера Gn, второй заданной точки Р2 в неподвижной координатной системе, а также поперечные смещения dA и dB точек A и В швартующегося судна от текущего положения траектории сближения, которой является линия A'nB'n.
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например, руля швартующегося судна, по известному закону. Таким образом, швартующееся судно движется в точку Р2 по линии A'nB'n.
Моментом выхода швартующегося судна во вторую заданную точку Р2 соответствует равенству координат ЦТ швартующегося судна и второй заданной точки, то есть X0G=X0P2, Y0G=Y0P2.
После выхода швартующегося судна в точку Р2 осуществляется дальнейшее сближение швартующихся судов до непосредственного контакта «борт к борту». С этой целью заданное текущее положение траектории сближения швартующихся судов, т.е. линия A'nB'n, постепенно смещается параллельно ДП судна партнера в сторону судна партнера со скоростью, не большей допустимого значения скорости поперечного движения швартующегося судна в направлении судна партнера υд. Скорость υд определяется исходя из безопасности швартовной операции, а именно из условия безопасного гашения поперечной скорости движения швартующегося судна в момент непосредственного контакта швартующихся судов средствами кранцевой защиты борта судна партнера. Параллельное смещение линии A'nB'n в сторону судна партнера обусловлено смещением точек A'n и B'n, текущее положение которых рассчитывается непрерывно в зависимости от значения расстояния h между бортами швартующихся судов. Постепенное уменьшение значения h в соответствии с законом
dh/dt=f(υд,h,h0,…)
приводит к изменению значения задаваемого расчетным способом расстояния между ДП швартующихся судов h0=h+0,5×(В+Bn) (здесь В - ширина швартующегося судна, Bn - ширина судна партнера), что, в свою очередь, изменяет координаты точек A'n и B'n и в конечном итоге линия A'nB'n смещается в сторону судна партнера, оставаясь параллельной его ДП.
Смещение линии A'nB'n от исходного положения в сторону судна партнера образует смещение dA, dB носовой А и кормовой В точек швартующегося судна соответственно. Формируется сигнал управления α=-kA×dA+kB×dB, и ДП швартующегося судна приводится к новому положению линии A'nB'n до их полного совпадения. Далее процесс смещения линии A'nB'n по указанному алгоритму в сторону судна партнера будет повторяться многократно, также многократно будут образовываться смещения носовой dA и кормовой dB точек швартующегося судна относительно текущего положения линии A'nB'n. Смещения носовой А и кормовой точек В швартующегося судна относительно текущего положения линии A'nB'n будет приводить к формированию управляющего сигнала средства управления швартующимся судном. Работа средства управления вернет ДП швартующегося судна на линию, совпадающую с текущим положением линии A'nB'n.
Смещение линии A'nB'n в сторону судна партнера производят до тех пор, пока расстояние h0 между ДП швартующихся судов будет равно значению, определяемому из выражения h0=0,5×(В+Bn), т.е. в этот момент расстояние между бортами швартующихся судов будет равно нулю h=0. Указанный момент в предлагаемом способе управления судном при выполнении им швартовной операции к борту судна партнера считается моментом окончания швартовной операции.
В результате применения данного изобретения достигается возможность получения технического результата - соблюдение условия завершения безопасной швартовной операции, т.е. осуществления непосредственного контакта «борт к борту» швартующихся судов.
Способ определения гидродинамических параметров математической модели судна
Способ определения поперечной гидродинамической силы и ее момента при выполнении сложного маневрирования судна
Способ управления траекторией движения судна
Способ определения демпфирующих составляющих нормальной гидродинамической силы и момента
Способ управления судном при выполнении им швартовной операции к борту судна-партнера, лежащего в дрейфе
Способ управления движущимся судном
Способ управления судном при выполнении им швартовной операции к борту судна партнера, стоящего на якоре
Способ определения поперечной гидродинамической силы, образующейся на корпусе судна при выполнении сложного маневрирования
Способ управления движением судна по заданной траектории
Способ управления движущимся судном
Электрохимический способ очистки хондроитина сульфата
Вантовая ветроэнергетическая установка
Способ определения местоположения объекта
Способ определения гидродинамических параметров математической модели судна
Способ получения консервов из рыбы полугорячего копчения
Способ определения поперечной гидродинамической силы и ее момента при выполнении сложного маневрирования судна
Способ управления траекторией движения судна
Способ извлечения никеля
Способ квазитрансавроральной радиосвязи в дкмв-диапазоне
Способ определения демпфирующих составляющих нормальной гидродинамической силы и момента

