Результат интеллектуальной деятельности: Акселерометр космический
Вид РИД
Изобретение
Изобретение относится к космической технике и предназначено для измерения ускорения поступательного движения в условиях невесомости в системах навигации и управления движением космических аппаратов (КА).
Баллистическое обеспечение функционирования КА - важная часть технического сопровождения КА на орбите при проведении единичных маневров и при осуществлении маневров на длительных промежутках времени прогнозирования движения. Реальной технической проблемой при эксплуатации КА является отсутствие высокоточных акселерометров для определения достоверных ускорений от работы двигателей коррекции (ДК) малой тяги. Потому управляющие ускорения (проекции ускорения от работы конкретного ДК на оси связанной с КА системы координат (ССК): ось минус Х совпадает с продольной строительной осью КА и направлена в центр Земли; ось Y совпадает с положительным транверсальным направлением орбитальной скорости КА; оси Х, Y принадлежат оскулирующей орбите КА) находят опосредованно - через изменения параметров движения центра масс КА. Погрешность определения ускорений в этом случае сильно зависит от длительности работы ДК и ошибок определения параметров движения по данным траекторных измерений. Если коррекции движения центра масс КА по соображениям баллистического обеспечения или ограничений со стороны бортовых систем проводятся часто (ежесуточно, даже раз в неделю), обозначенная техническая проблема становится настоятельной.
Известно множество схем устройств акселерометров. В качестве основных направлений разработок, для сравнения с предлагаемым устройством, можно привести следующие.
Известен интегральный микромеханический автоэмиссионный акселерометр (RU 2390031 C1, МПК G01P15/14), содержащий подложку, четыре неподвижных электрода, жестко закрепленных относительно подложки, инерционную массу, расположенную с зазором относительно подложки, четыре подвижных электрода, жестко соединенных с инерционной массой, образующих с неподвижными электродами четыре пары туннельных контактов, используемых в качестве преобразователей перемещения, якорную область, жестко закрепленную относительно подложки, четыре вспомогательных неподвижных электрода, жестко закрепленных относительно подложки, четыре вспомогательных подвижных электрода, расположенных с зазором над вспомогательными неподвижными электродами, образуя с ними четыре плоских конденсатора, согласно изобретению, дополнительно содержит крестообразный подвес, центральная часть которого закреплена относительно якорной области, и опорную рамку, соединенную с крестообразным подвесом и закрепленную относительно инерционной массы, при этом вспомогательные подвижные электроды закреплены по углам опорной рамки, подложка и инерционная масса выполнены из диэлектрического материала, подвижные и неподвижные электроды и вспомогательные неподвижные электроды выполнены из металла, а якорная область, крестообразный подвес, опорная рамка и вспомогательные подвижные электроды выполнены из полупроводникового материала единым элементом. При возникновении ускорения подложки в направлении одной из осей, опорная рамка вместе с инерционной массой и закрепленными на ней подвижными электродами под действием сил инерции перемещается вдоль этой оси, что приводит к деформации крестообразного подвеса. Туннельные токи, протекающие между подвижными электродами и неподвижными электродами, получают равные приращения вследствие одновременного изменения ширины всех зазоров, характеризуя величину ускорения. При работе в компенсационном режиме сила, воздействующая на опорную рамку с закрепленной на ней инерционной массой, вызванная измеряемым ускорением, уравновешивается с помощью вспомогательных неподвижных электродов и вспомогательных подвижных электродов, что позволяет поддерживать постоянными туннельные токи, протекающие между подвижными и неподвижными электродами. Выходным сигналом при этом является величина напряжения, прикладываемого между вспомогательными электродами.
В аналоге используют то, что «вследствие малости зазора, разделяющего области подвижных и неподвижных электродов, электроны, имеющие достаточную вероятность прохождения сквозь потенциальные барьеры, образованные зазорами, туннелируют из неподвижных электродов в соответствующие подвижные электроды и тем самым создают туннельные токи, которые являются выходными сигналами устройства».
Недостатком данного устройства является безусловно низкая чувствительность, которую не поднять никакими приемами в данном направлении техники, поскольку теория туннельного эффекта сложна, формула плотности тока, то же, что и силы, имеют специфический для каждого вещества коэффициент и степенную форму, в степени стоят напряженность внешнего электрического поля и величина в тех же единицах, включающая в себя достаточно много нелинейной специфики, относящейся к свойствам электрона. Отсюда следует, что функция изменения силы тока (что можно интерпретировать как ускорение от внешних сил) также не линейна - одни и те же условия опыта не гарантируют качества определения ускорения.
Известен трехосевой акселерометр с переменной осевой чувствительностью (RU 2390030 C2, МПК G01P15/097, G01P15/18), содержащий инерционную (инерциальную) массу и опорную систему для инерционной массы, причем опорная система содержит основание и множество опорных элементов, проходящих между основанием и инерционной массой для подвешивания инерциальной массы в ортогональных направлениях, обеспечивая статически неопределенную конструкцию, датчики напряжений, предназначенные для измерения обусловленного напряжением ускорения в опорных элементах посредством определения параметра ускорения массы. Вместо тензодатчиков возможно использование других датчиков, например пучковых резонаторных систем, в которых частоты колебаний изменяются при изменении нагрузки пропорционально ускорению, формируя соответствующий выходной сигнал.
Во втором аналоге возможно применение в его устройстве широкого спектра различных чувствительных элементов, параметры которых изменяются пропорционально ускорению от нагрузки, таких, как тензорезисторы, кристаллические диэлектрики, резонаторные системы. Возможно, у него есть один плюс - массогабаритные характеристики (что не факт, поскольку измерительную систему зачастую приходится наращивать под выбранный диапазон внешних усилий), но и один большой минус - ни одна модификация данного технического решения не приближает точность определения ускорения к точности показаний единичного хорошего датчика, скажем, 1-2%, уже потому, что длинная цепочка датчиковой аппаратуры, преобразовательных цепей, часов от внешнего усилия до результата. В отношении тензодатчиков. Они работают обычно в области упругих деформаций при ε≤10-3, изменяя свое сопротивление пропорционально начальному, ε и коэффициенту тензочувствительности k=2-200, при этом в области малых нагрузок (k - единицы), что имеет место при включениях двигателей коррекции в космосе, собственно эффект исчезает на фоне температурного изменения сопротивления даже при изменении температуры на несколько градусов. Такую теплоизоляцию в условиях космоса обеспечить проблематично. В отношении пьезоэлектрических датчиков. Под действием давления возникают электрические сигналы (суммарная ЕДС пропорциональна давлению) за счет поляризации диэлектрика, пропорциональной некоторому коэффициенту (для кварца, например, 3⋅10-8) и сильно зависящего от условий работы, в общем эффект с одной стороны тонкий - небольшая величина поляризации, с другой грубоватый - большие внешние нагрузки. И главное -ввиду того, что при относительно постоянном давлении (ускорении), что требуется в космических условиях при определении ускорения движения центра масс КА, эффект быстро исчезает, т.к. электрические заряды «стекают», пьезодатчики в принципе не применимы. В отношении применения резонаторных систем. Данное техническое решение основано на том, что элемент-камертон, подверженный колебанию от генератора частоты, под действием растяжения/сжатия от воздействия инерционной массы изменяет частоту своих колебаний пропорционально ускорению. Точность определения изменения результирующего колебания резонатора весьма низкая, либо технически сложная задача.
Есть еще немало устройств акселерометров, основанных на электрических и электромагнитных эффектах. Использование этих эффектов требует больших усилий по доработке соответствующих устройств и настройке рабочего процесса в условиях такого деликатного дела, как определение ускорения от работы двигателя малой тяги при коррекции движения центра масс КА, схожей с дуновением ветра.
Известен высокоточный космический акселерометр (RU 2399915 C1 МПК G01P15/105), содержащий инерционную массу, корпус, электрическую схему переключателя и фиксации времени, отличающийся тем, что корпус представляет собой сферу, внутри которой расположена с зазором внутренняя сфера, подвес внутренней сферы связывает ее с внешней сферой и состоит из четырех подпружиненных штырей, равномерно разнесенных по поверхности внутренней сферы, закрепленных на ней, свободно проходящих сквозь люфтовые отверстия в корпусе; с внешней стороны корпуса установлены электромагниты в количестве, кратном двум, по числу осей установок двигателей коррекции движения центра масс космического аппарата; в качестве инерционной массы используется магнитовосприимчивый шарик, находящийся во внутренней сфере; внешняя электрическая схема предусматривает включение-отключение выбираемых электромагнитов и фиксацию моментов отключения электромагнита и размыкания электроконтакта (начало движения шарика) и замыкания одного из электроконтактов при нажиме шарика в каком-либо месте на поверхность внутренней сферы в конце его движения. Максимальная погрешность определения ускорений этим устройством составляет 3% при наиболее вероятной 1-2%. Предлагаемое техническое решение - иное и более простое устройство, с помощью которого управляющие ускорения определяются, как и в аналоге, на основе законов классической механики с не меньшей точностью.
Есть устройства, которые, являясь, по сути, акселерометрами, имеют самостоятельное название и занимают определенную нишу в технике. Это гравиметры, более того, маятниковые гравиметры. Маятниковые гравиметры необходимы для определения абсолютных значений ускорений силы тяжести на поверхности земли, акваторий и в околоземном воздушном пространстве. Но если маятниковые гравиметры так хороши, почему же их не использовать в космосе для определения управляющих ускорений от работы двигателей коррекции КА. Ускорение силы тяжести действует на КА в целом, потому не оказывает никакого возмущающего влияния на движение маятника: маятник в замкнутой системе КА ведет себя так, как если бы он находился в абсолютной и полной невесомости по отношению к Земле. Если даже маятниковый прибор не в герметичном корпусе, на высоте от 800 км влияние воздушного слоя Земли ничтожно.
Сложность и громоздкость абсолютных измерений ускорений силы тяжести на Земле заключается в том, что период колебаний маятника необходимо измерять с погрешностью до 10-7 с, длину маятника с погрешностью до 0,001 мм. Погрешность абсолютных измерений ускорений силы тяжести с помощью маятниковых приборов на обсерваториях может быть доведена до 1 - 3 мГал.
Все меняется, если измерять не приземные ускорения g, а ускорения, более чем на пять порядков меньшие. Тогда период колебаний можно измерять с существующей для всех бортовых систем гарантией в (0,25 - 1) с.
Известен маятниковый гравиметр (SU 1065807 A Кл. G01V 7/02), содержащий герметичный корпус, маятник, ареттирующее устройство, систему съема информации о величине периода колебания маятника. Маятник выполнен в виде двух сверхпроводящих шаровых сегментов, жестко соединенных между собой и взвешенных в магнитных полях шаровых криогенных опор, расположенных на одном уровне.
В рабочем режиме, после того, как все части гравиметра охладятся до температуры жидкого гелия, в опорных сверхпроводящих катушках возбуждается незатухающий ток, обеспечивающий взвешивание (левитацию) сверхпроводящих шаровых сегментов. Для создания необходимой начальной амплитуды колебания шаровых сегментов на них воздействуют магнитным полем внешних электромагнитов, находящихся снаружи корпуса прибора. В устройстве рассмотрен вариант циклоидального маятника.
Съем информации о периоде колебания маятника производится фотоэлектрическим датчиком: между шаровыми сегментами находится пластина-флажок, на расстоянии конца которой находятся источник излучения светодиод и приемник излучения фотодиод, освещенность которого определяется положением флажка относительно иллюминатора фотодиода.
Идея взвешивания хороша, только в условиях космоса, где температура корпуса КА меняется от минус 150°С до плюс 200°С, удержать рабочую температуру в пределах 2 - 4 градусов от абсолютного нуля не представляется возможным, либо реализация таких температурных условий - сверхсложная и неоправданная ценою задача. Ведь мало того, что возможно удастся снизить температуру до температуры жидкого гелия, ее еще надо постоянно поддерживать на таком уровне, так как планы на проведение маневров КА меняются как по принятому расписанию, так и не штатно.
Известен маятниковый гравиметр (BY 6790 C1 G01V 7/02), который взят за прототип. Гравиметр содержит физический маятник с опорой качания, содержащей подвижную часть в виде поверхности качания и неподвижную часть в виде опорной площадки, измерители периода и амплитуды колебаний физического маятника, отличается тем, что поверхность качания выполнена в виде двух сфер, расположенных симметрично относительно прямой, проходящей через центр тяжести физического маятника и перпендикулярной мгновенной оси вращения последнего, причем мгновенная ось вращения физического маятника проходит через точки контактов сфер с опорной площадкой. В общем, прибор представляет собой Т-образную подвижную часть, полочкой с жестко присоединенными к ней (полочке) симметрично относительно маятника, также жестко присоединенного к ней, шаровыми опорами, опирающуюся на неподвижное (относительно места испытания) основание. Есть еще модификация этого изобретения (BY 6935 C1 G01V 7/02), где штанга с массой (маятник) заменена на диск со встроенными туда массой и элементом термокомпенсации, взаимно диагонально разнесенными, но это сути не меняет. Прототип, в принципе, в части определения малых ускорений, может дать хорошие результаты, и он обладает приемлемыми массогабаритными характеристиками. Однако в условиях космоса, где сила тяжести практически отсутствует, свободный подвес поверхности качания маятника на неподвижную опору (корпус КА) согласно прототипу невозможен.
Тем не менее, доработав прототип в части подвеса, можно получить то или иное техническое решение вышеприведенной технической проблемы под названием акселерометр космический (АК).
Задачей является создание АК, измеряющего ускорение поступательного движения с точностью не меньшей, чем в прототипе.
Поставленная задача решается за счет того, что в АК, содержащий корпус, физический маятник в виде осесимметричного стержня, измеритель периода колебаний физического маятника, введены: подвес маятника в виде широкой кольцевой и узкоцилиндрической частей опоры качания, являющихся соответственно подвижной и неподвижной частями подвеса маятника; внутри маятника-стержня вдоль его оси - светодиод и конденсор; в месте, промежуточном между серединой рабочего цикла качания маятника и крайним его положением внутри панели, крепящейся к корпусу акселерометра - фотодатчик, включающий в себя фотоэлемент и объемную щелевую диафрагму с осью щели, перпендикулярной вектору качания маятника; активная система термостатирования акселерометра.
Технический результат достигается за счет того, что, спустя известное максимальное время выхода ДК на рабочий режим, отключают арретирующие электромагниты, магнитовосприимчивый стержень-маятник начинает свое движение на подвесе. Заранее выбрав предельно простую форму маятника - стержень, знают точно момент инерции тела маятника относительно оси качания. Взвешиванием маятника на Земле определяют расстояние от точки качания в подвесе (находящейся на поверхности кольцевой подвижной части опоры качания) до центра тяжести. По окончании работы ДК, зная период колебания маятника по фиксациям наличия фототока, будем иметь абсолютное значение ускорения вдоль установочной оси ССК, не привлекая данные измерений орбитальных параметров, требующих длительности работы ДК в разы большие, чем это требует технология поддержания баллистической структуры функционирования КА.
Проведенный заявителем анализ уровня техники установил, что аналоги, характеризующиеся совокупностями признаков, тождественным всем признакам заявленного АК отсутствуют, следовательно, заявленное изобретение соответствует условию «новизна». Результаты поиска известных технических решений в данной и смежных областях техники (измерительная техника, акселерометры, микросистемная техника) с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники. Ни один из отличительных признаков данного изобретения: ни эксцентричный подвес физического маятника, ни объемная щелевая диафрагма фотодатчика, ни активная система термостатирования акселерометра (и гравиметра) ранее не применялся для изготовления акселерометров (и гравиметров) вообще, и АК в частности, и потому все эти отличительные признаки отвечают условию «изобретательский уровень».
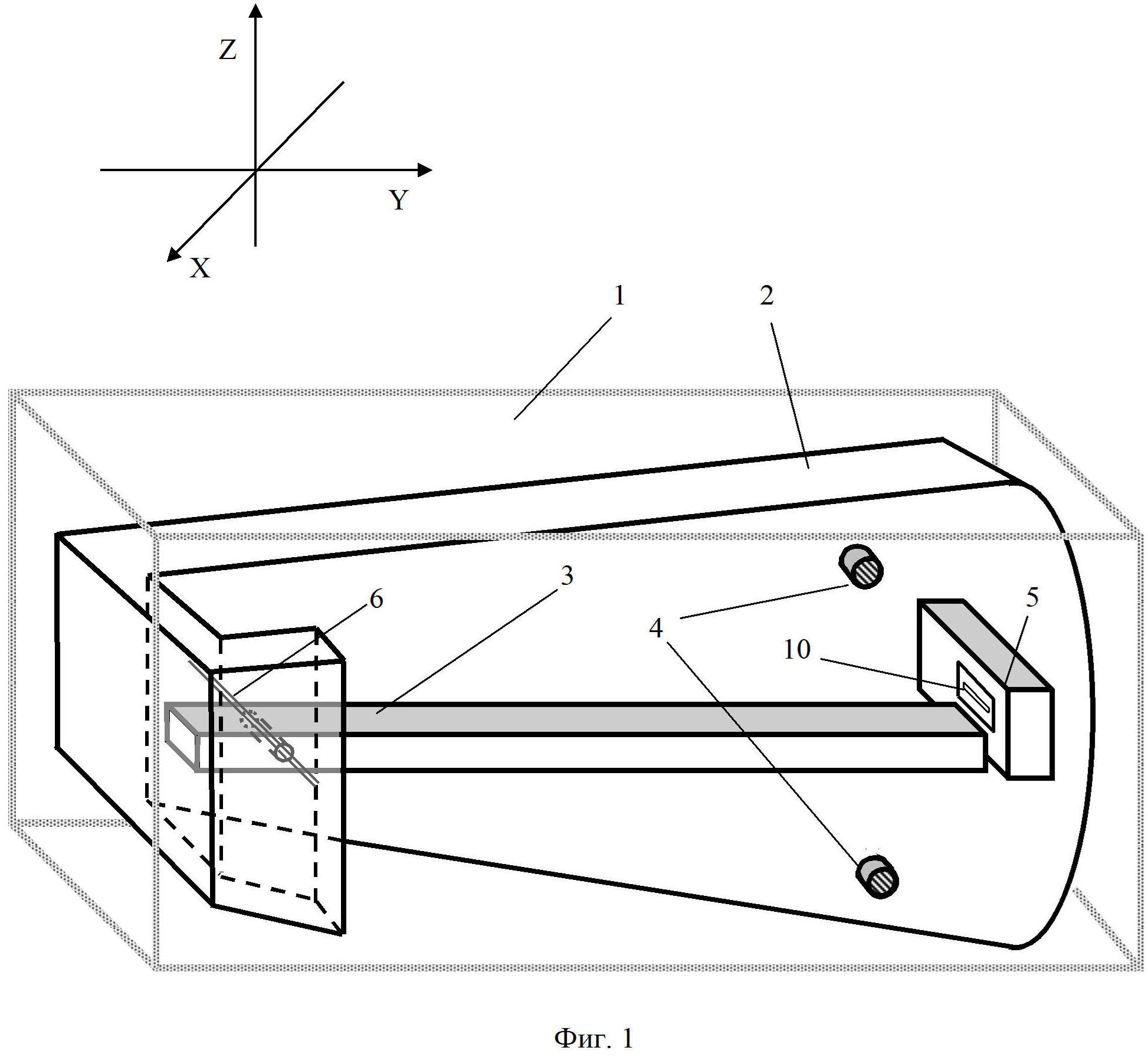
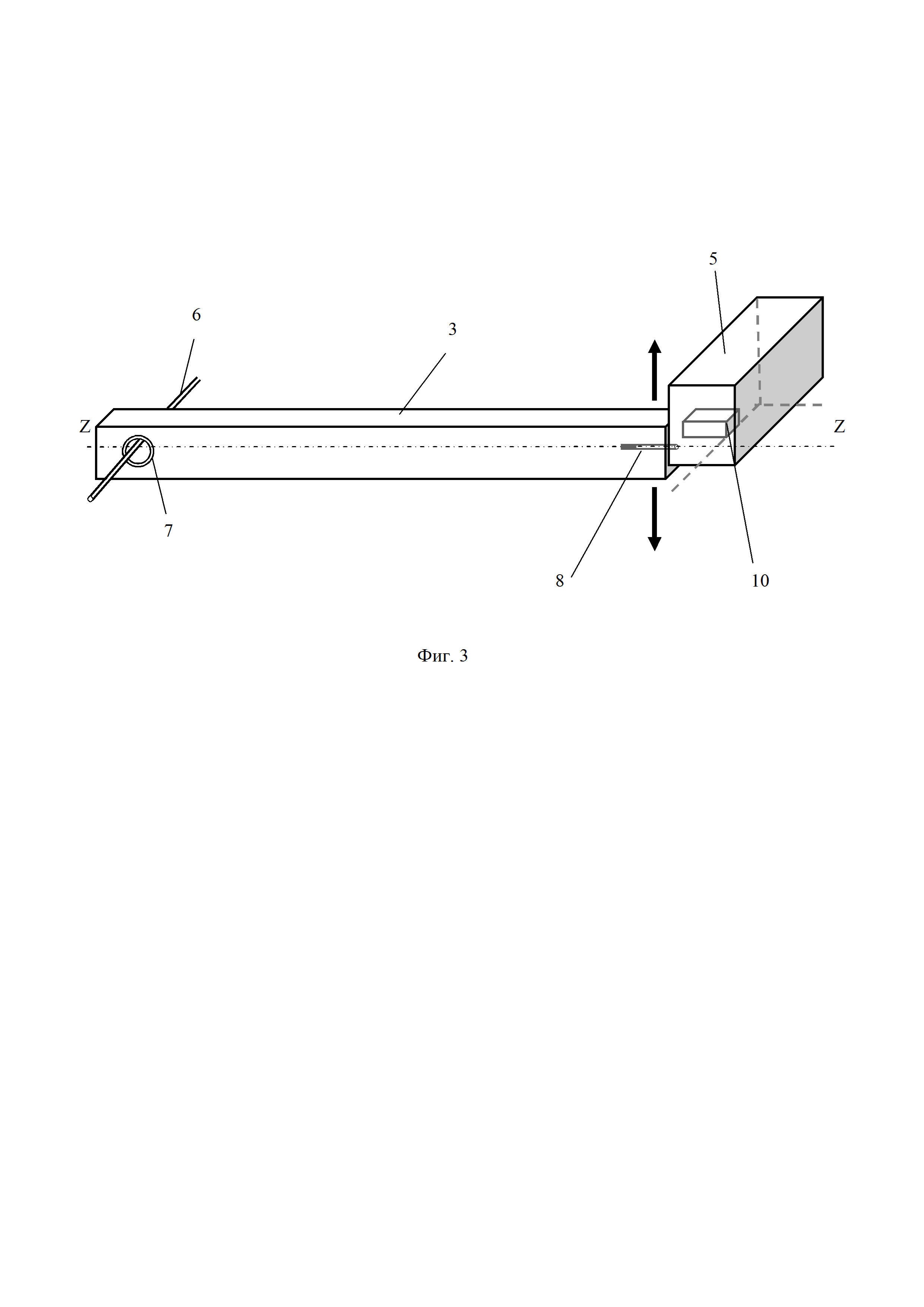
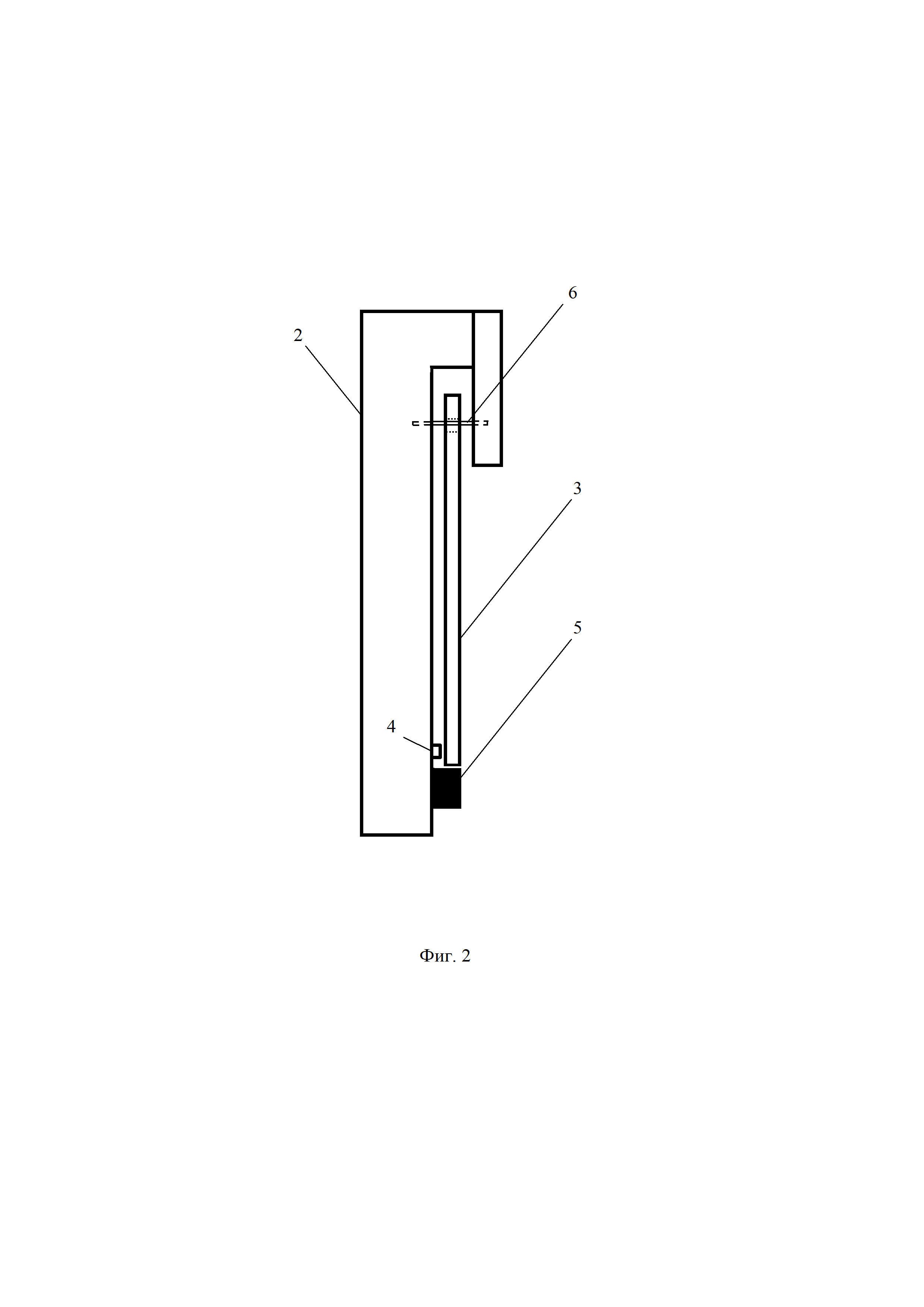
Сущность изобретения поясняется фиг. 1, фиг. 2, где представлены принципиальные схемы АК, соответственно вид спереди и вид сбоку, фиг. 3, где изображена рабочая система АК, фиг. 4, где показана электрокинетическая схема АК. Введены следующие обозначения:
1 - корпус АК с активной системой термостатирования;
2 - опорная конструкция;
3 - физический маятник;
4 - арретирующие электромагниты;
5 - фотодатчик;
6 - узкоцилиндрическая неподвижная опора (ось) подвеса;
7 - кольцевая подвижная опора подвеса;
8 - светодиод с конденсором;
9 - световой луч;
10 - объемная щелевая диафрагма;
11 - фотоэлемент.
Электрическая схема АК не создает сколько-нибудь заметных нагрузок на общую систему энергопитания КА, поскольку включает в себя два маломощных «телефонных» электромагнита 4, один из которых гарантированно удерживает магнитовосприимчивый стержневой маятник 3 в состоянии покоя в отсутствие работы ДК, светодиод 8 и фотоэлемент 11 внутри фотодатчика 5.
Физический маятник 3 должен быть восприимчивым к магнитным полям электромагнитов 4, чтобы в своем нерабочем состоянии - в промежутках между орбитальными маневрами КА находиться над одним из них, приведенных в рабочее состояние (магнитные поля).
Оценим период качания (колебаний) рабочего стержневого маятника 3. Период Т (с) колебаний равен ([1] Б.М.Яворский и А.А.Детлаф, Справочник по физике (седьмое издание), М.: Изд. «Наука», 1977, стр. 116):
 , (1)
, (1)
где J - момент инерции маятника относительно оси качания 6, кг/м2;
m - масса маятника, кг;
а - ускорение вдоль установочной оси от работы ДК, м/с2;
d - расстояние от точки подвеса до центра масс, м.
Поскольку ([1] стр. 74) J для прямолинейного тонкого стержня равен m⋅l2/12, где l - длина стержня, то масса уходит, и:
 . (2)
. (2)
Здесь не учитывается факт того, что в стержень встроены опорное кольцо и светодиод с оптической системой. Но все это встроено симметрично главной оси инерции ZZ (фиг. 3), и здесь приводится лишь оценка возможности эффективной работы АК.
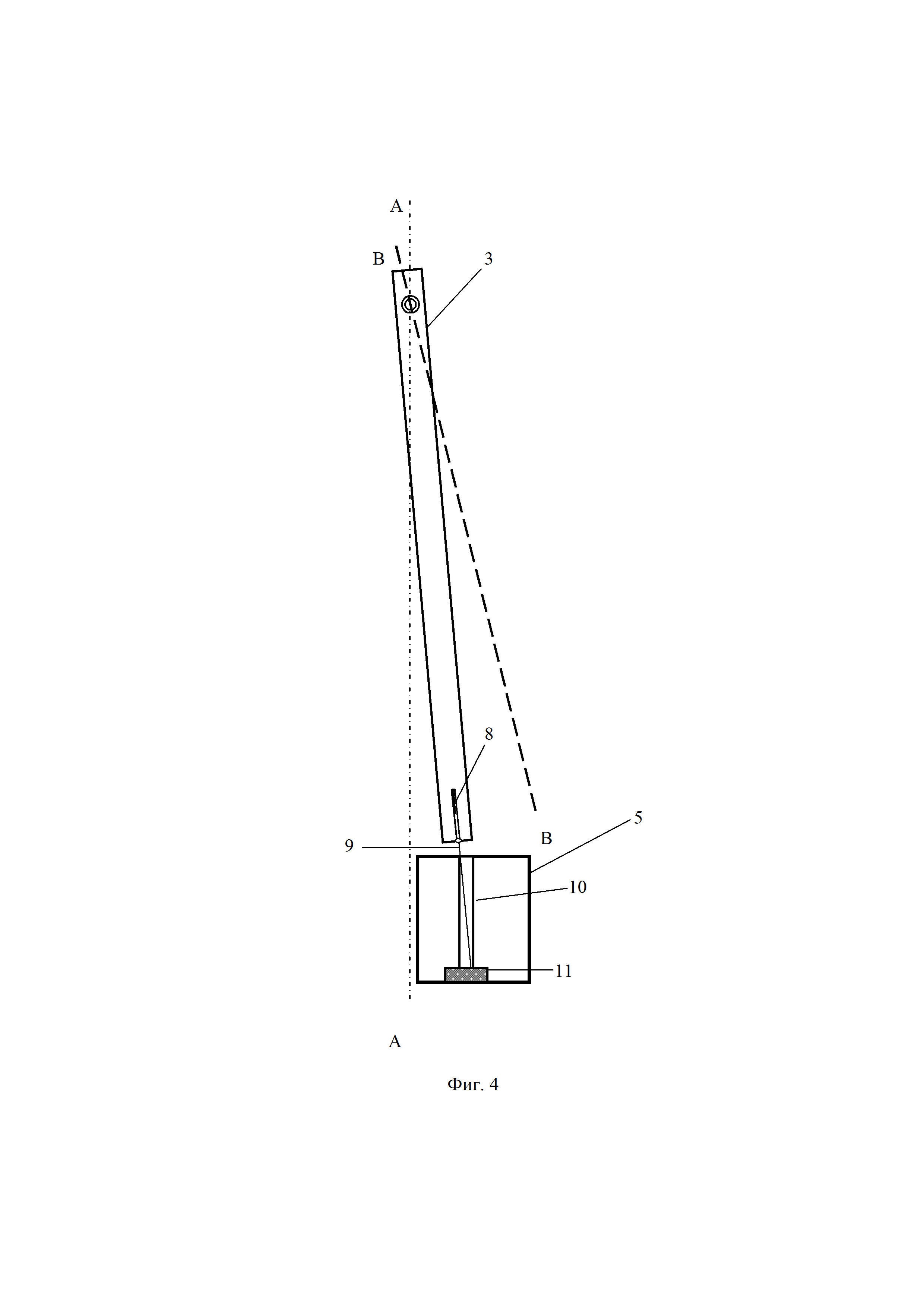
Примем l равное 0,250 м; d равное 0,090 м; диапазон управляющих ускорений а (0,05 - 0,17)⋅10-4 м/с2. Тогда период качания физического маятника 3 - интервал между двумя последовательными прохождениями в одном направлении светодиода 8 над одной и той же точкой поверхности фотоэлемента 11, расположенного на дне объемной щелевой диафрагмы 10, составит 338 - 617 с или 5 - 10 мин. Начальная и рабочая амплитуда качания маятника 3 АК 5 - 10 градусов. Скорость перемещения оси ZZ маятника составляет 1,0 - 3,5 мин/с. Скорость благоприятная для фиксации (до 1 с) попадания луча 9 от светодиода 8 на фотоэлемент 11 фотодатчика 5. Объемная диафрагма необходима для фиксации момента времени, когда узкопараллельный луч от светодиода, сформированный конденсором, появится над краем щели, появится настолько, чтобы образовать ток в фотоэлементе 11. Диафрагма и датчик в целом устанавливаются между серединой рабочего цикла качания маятника (ось АА фиг. 4) и крайним его положением (ВВ фиг. 4). Скорость прохождения луча над диафрагмой, ширина и глубина диафрагмы 10 не имеют значения: важен факт появления луча во всегда одинаковой минимальной и достаточной для появления фототока в фотоэлементе силе. В самом деле, для определения периода качания маятника, какая бы ни была задержка появления луча в полной силе по отношению к иному управляющему ускорению от работы ДК, разность времен третьего и первого появлений фототока (период качания) в рабочем цикле маятника будет всегда свободна от ошибки за счет задержки появления эффективного луча и, значит, фототока. Объемная щелевая диафрагма решает задачу безошибочного определения периода качания маятника.
За счет трения частей 6 и 7 подвеса друг о друга за время работы ДК амплитуда качания будет постепенно уменьшаться в рабочем цикле, но:
1 - эти изменения, ввиду массивности маятника и малой области непосредственного соприкосновения трущихся тел, настолько малы, что не требуют никакого учета;
2 - даже при амплитуде в 15 градусов период качания превышает период качания с предельно малой амплитудой не более чем на 1% (свойство изохронности);
3 - затухание механических колебаний системы обусловлено сухим трением, тогда циклическая частота затухающих колебаний (период качания) совпадает с циклической частотой (периодом качания) свободных колебаний той же системы в отсутствие трения ([1] стр. 118-119).
Период может определяться с относительной погрешностью менее 1%. Тогда, исходя из (1) и (2), считая l и d физического маятника известными точно, а температурные деформации остальных частей АК основными источниками погрешности определения периода качания маятника, будем иметь:
 , (3)
, (3)
 , (4)
, (4)
где 
 - соответственно относительные погрешности определения ускорения и периода качания.
- соответственно относительные погрешности определения ускорения и периода качания.
Имеем:
 0,024 или 2,4%
0,024 или 2,4%
и
 0,002 или 0,2%.
0,002 или 0,2%.
С помощью такого АК можно определять ускорения не только от работы ДК, но и ускорения меньших порядков от влияния внешних космических факторов. Активная система термостатирования позволит исключить тепловые деформации частей АК.
АК работает так.
1. Включают ДК.
2. Через гарантированное время выхода ДК на рабочий режим создания тяги отключают питание от арретирующих электромагнитов 4; включают светодиод 8.
Маятник начинает свои эволюции.
3. Фиксируют время t1 появления фототока в фотодатчике 5 - начальное время рабочего цикла.
4. Фиксируют третье время t3 появления фототока - конечное время рабочего цикла.
5. Определяют период качания (t3 - t1).
П.п. 3 - 5 от цикла к циклу повторяют, пока работает ДК.
6. Перед выключением ДК за время не меньшее среднего периода качания маятника подают питание на арретирующие электромагниты 4; выключают светодиод 8.
Маятник притягивается к одному из электромагнитов 4 и находится в состоянии покоя до очередного включения ДК данного направления тяги.
7. Отключают ДК.
8. Определяют среднее значение периода качания.
9. Определяют среднее управляющее ускорение.
П.п. 1 - 9 повторяют в течение всего срока активного существования КА.
АК должно быть не менее четырех: по два в разные стороны на каждую из осей Y и Z ССК. Полный комплект состоит из 6 АК, если интересует ускорение вдоль оси Х ССК.
Маятник-стержень следует делать из материала с малым температурным коэффициентом линейного расширения, например, из инвара.
Акселерометр космический, содержащий корпус, физический маятник в виде осесимметричного стержня, измеритель периода колебаний физического маятника, отличающийся тем, что подвес маятника представляет собой широкую кольцевую и узкоцилиндрическую части опоры качания, являющиеся соответственно подвижной и неподвижной частями подвеса маятника, внутри маятника-стержня вдоль его оси установлены светодиод и конденсор, в месте, промежуточном между серединой рабочего цикла качания маятника и крайним его положением внутри панели, крепящейся к корпусу акселерометра, имеется фотодатчик, включающий в себя фотоэлемент и объемную щелевую диафрагму с осью щели, перпендикулярной вектору качания маятника, имеется активная система термостатирования акселерометра.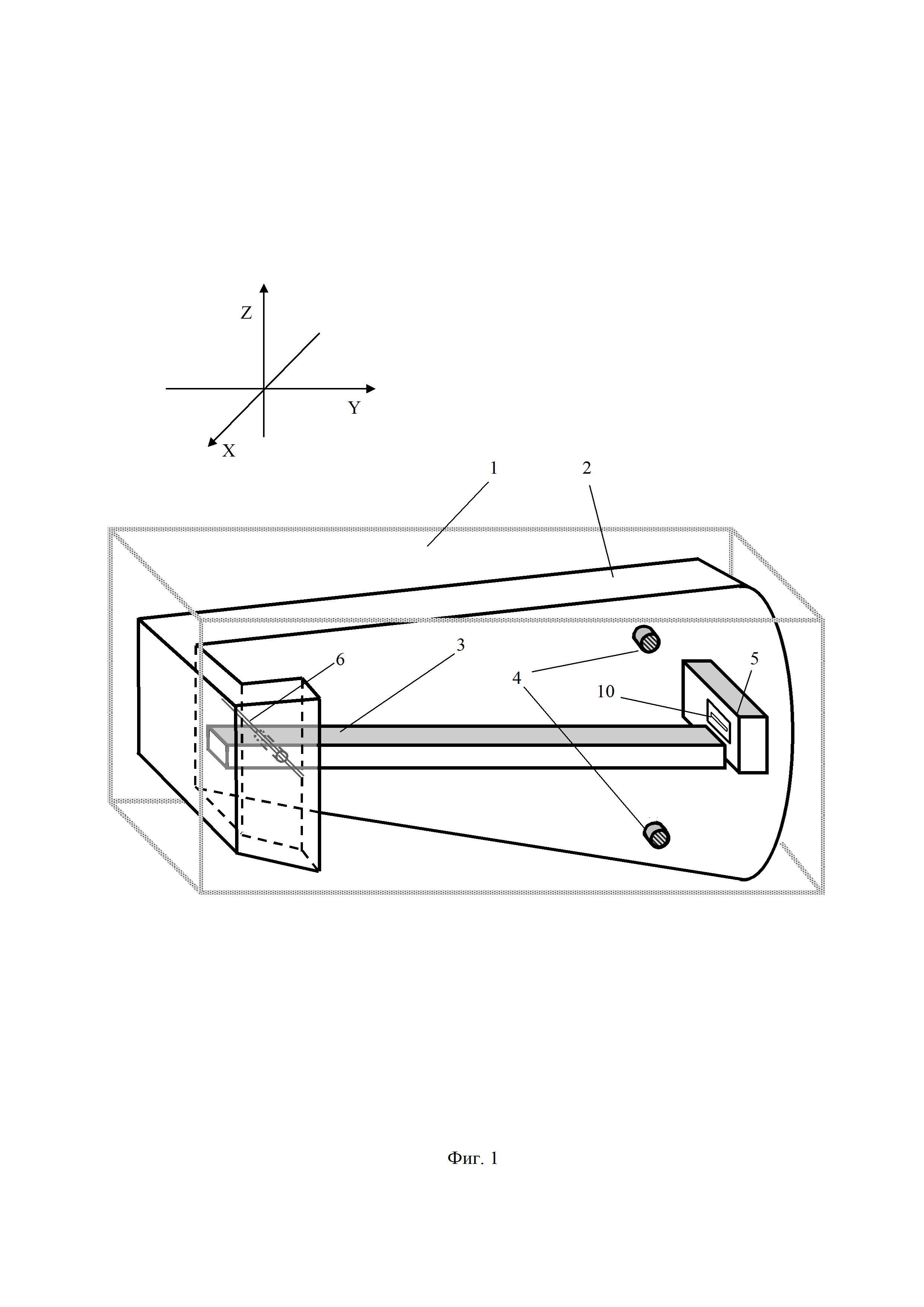
Способ контроля геометрии крупногабаритных объектов
Способ автономной коллокации на околостационарной орбите
Поворотное устройство с трособлочной системой для обезвешивания раскрываемых конструкций космического аппарата
Телескопическая упругая опора
Резервированный релейный коммутатор
Контроллер сетевого транспортного протокола
Способ изготовления отражательной сетчатой поверхности антенны и сетчатое полотно для его осуществления
Способ мониторинговой коллокации на геостационарной орбите
Способ изготовления сетчатой поверхности антенны
Способ определения и уточнения ускорений от работы двигателей коррекции космического аппарата
Способ регулирования и стабилизации давления в рабочих установках сильфонного типа
Способ удержания геостационарного космического аппарата на заданной орбитальной позиции
Способ удержания геостационарного космического аппарата на заданной орбитальной позиции
Способ адаптивного управления движением центра масс космического аппарата
Способ коррекции орбитального движения космического аппарата
Способ коррекции орбитального движения космического аппарата
Циклотронный плазменный двигатель
Космический измеритель приращения скорости
Способ тестирования двигателей коррекции космического аппарата
Способ удержания космического аппарата на геосинхронной 24-часовой орбите

