Результат интеллектуальной деятельности: СПОСОБ УДЕРЖАНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ЗАДАННОЙ ОРБИТАЛЬНОЙ ПОЗИЦИИ
Вид РИД
Изобретение
Предлагаемое изобретение относится к области космической техники и может быть использовано для удержания космического аппарата (КА) в заданном диапазоне географических долгот и широт рабочей позиции на геостационарной орбите.
Известен способ автоматических коррекций удержания геостационарного КА [1], изложенный в рабочей документации предприятия. Суть способа автоматических коррекций сводится к следующему:
1. Зная величину ежесуточного изменения сидерического периода обращения за счет геопотенциала и считая влияние Луны и Солнца принципиально несущественными для реализации среднего движения в фазовой плоскости [Т;λ], выставляют КА на позицию [λст;(1/2)ΔТе/с], где λст - долгота «стояния» (или центр орбитальной позиции), ΔТе/с - ежесуточное изменение сидерического (от одного до другого пересечения плоскости XOZ в инерциальной геоцентрической системе координат) периода обращения.
2. Проводят ежесуточные коррекции соответствующими знаку и величине изменения ΔТе/с двигателями (двигателем) коррекции (ДК) в течение всего цикла автоматического удержания, длительность которого соответствует интервалу времени между проведениями траекторных измерений.
Идея состоит в том, что при аккуратной выставке КА на исходную позицию возмущения от Земли, Луны, Солнца, солнечного давления не влияют на среднее на больших интервалах времени движение КА, и удержание осуществляется по т.н. предельному циклу, когда КА в фазовой плоскости после коррекции периода на величину ΔТе/с пассивно возвращается на исходную позицию.
Способ не прошел испытаний практикой: ошибка выставки КА на исходную позицию (ошибка определения положения КА ΔТопр по данным траекторных измерений, на сегодня 0,5с по периоду) и, особенно, ошибка реализации тяги ДК (~11%) приводили к скорому выходу не только из гарантированной области удержания по долготе Δλгарант=Δλном-2е-Δλопр-Δλвит-Δλi,
где Δλном - заданная область удержания, ±(0,1→0,05)°;
е - эксцентриситет орбиты, 0,0005→0,00029;
Δλопр - максимальная погрешность определения и прогнозирования текущей долготы, более 1 угл. мин;
Δλвит - максимальная суммарная амплитуда внутривитковых колебаний по долготе за счет возмущения долготы и эксцентриситета, менее 1 угл. мин;
 - амплитуда колебаний по долготе за счет наклонения, при i≤0,1° - менее 9 угл. с,
- амплитуда колебаний по долготе за счет наклонения, при i≤0,1° - менее 9 угл. с,
но и из заданной (номинальной) области, при этом траекторные измерения проводились не чаще чем раз в месяц. Дело в том, что для большинства долгот «стояния» ежесуточное изменение сидерического периода обращения ΔТе/с составляет (0,25-0,48)с, значит, каждые сутки следует изменять период на величину (0,25-0,48)с, и каждые сутки погрешность (ΔTF) за счет реализации коррекции (тяги) составит (0,028-0,053)с, за 10 сут накопится погрешность (0,28-0,53)с, за месяц - (0,85-1,55)с. При известной зависимости скорости (Vλ) дрейфа по долготе от отклонения (ΔТс) сидерического периода от звездных суток (86164,1 с)
Vλ≈ΔТс/4, угл. мин/сут,
где ΔТс=(1/2)ΔТе/с+ΔТопр+ΔTF, имеем уход за 10 суток в (1,9-2,2) угл. мин от долготы «стояния»; за 30 суток - (7,9-10,5) угл. мин. Это значит, что даже при эксцентриситете 0,00029 удержание даже в области ±0,1° в течение 10 суток маловероятно. Таким образом, для многих КА, функционирующих на геостационарной орбите в области Δλном=±0,05°, способ автоматических коррекций вообще неприемлем.
Известен «Способ одновременной коррекции удержания вектора наклонения орбиты и периода обращения трехосностабилизированного космического аппарата» (RU 2381965, МПК B64G 1/24) [2], который и взят за прототип. Согласно этому способу, включающему проведение коррекций, определяют требуемый угол отклонения вектора тяги ДК от нормали к орбите в плоскости рысканья, исходя из обеспечения заданной точности исполнения коррекции периода обращения КА и требуемых изменений за коррекцию трансверсальной и ортогональной составляющих вектора скорости КА задают отклонения направлений векторов тяги ДК, рассчитывают длительности работы ДК по формулам:
 ;
;
где τ1,τ2 - длительности работы ДК, с;
Jn, Jτ - импульсы тяги, требуемые для коррекций соответственно вектора наклонения орбиты и периода обращения КА, Н·с;
F1,F2 - тяги ДК, Н;
θ1, θ2 - углы отклонения векторов тяги ДК от нормали к плоскости орбиты в плоскости рысканья по наименьшей дуге,
и проводят коррекцию парой ДК, установленных по разные стороны от нормали к орбите, для чего производят последовательно их включения на расчетные длительности работы. При этом выполняется следующая последовательность операций (все угловые величины выражены в радианах):
1. Определяют требуемый угол (θ) отклонения вектора тяги ДК от нормали к орбите исходя из обеспечения заданной точности исполнения коррекции периода обращения КА и требуемых изменений за коррекцию трансверсальной и ортогональной составляющих вектора скорости КА.
Величину угла θ рассчитывают по формуле
где θ - острый угол отклонения ДК по разные стороны от нормали к орбите в плоскости рысканья;
ввиду того, что 
следует
 ;
;
δθ - погрешность, с которой поддерживается положение КА в плоскости рысканья относительно центра масс;
δVτ - задаваемая максимальная относительная погрешность реализации корректирующего импульса на изменение периода обращения КА;
ΔVτ - требуемое максимальное изменение за коррекцию трансверсальной составляющей вектора скорости КА в течение срока его активного существования, м/с;
ΔVn - требуемое изменение за коррекцию ортогональной составляющей вектора скорости КА, соответствующее расчетному максимальному изменению вектора наклонения  (составляющие вектора наклонения ix=sin(i)·cos(Ω); iy=sin(i)·sin(Ω), Ω - долгота восходящего узла орбиты), м/с.
(составляющие вектора наклонения ix=sin(i)·cos(Ω); iy=sin(i)·sin(Ω), Ω - долгота восходящего узла орбиты), м/с.
Следует отметить, что способ не требует угловых разворотов КА. ДК устанавливаются конструктивно под заранее рассчитанными углами θ1 и θ2.
2. Задают отклонения направлений векторов тяги ДК.
Устанавливают по два ДК относительно обеих полуосей нормали к орбите. Направления векторов тяги ДК сейчас задают отклонениями от нормали к орбите в плоскости рысканья на углы «+θ» и «-θ». В общем случае модули этих углов могут быть не равны.
3. Юстируют направление векторов тяги ДК.
При установке ДК на КА под углами «+θ» и «-θ» за направление вектора тяги ДК принимается геометрическая ось ДК. Однако за счет погрешности установки ДК и отклонения фактического направления вектора тяги ДК от его геометрической оси фактические углы направления векторов тяги отличаются от расчетных. Поэтому производится юстировка, при которой определяют фактические углы отклонения векторов тяги ДК от нормали. Для проведения юстировки включают поочередно ДК и после каждого включения проводят траекторные измерения. По изменению параметров орбиты и определяют фактические углы θ1 и θ2 соответственно для первого и второго ДК каждой из полуосей нормали к орбите. Например, для геостационарной орбиты углы θ1 и θ2 можно определить по формуле
где µ - гравитационный параметр Земли, км3/с2;
ΔТ - изменение периода обращения КА за счет работы ДК (определяется по результатам траекторных измерений), с;
R - радиус номинальной геостационарной орбиты КА, км;
а - ускорение, создаваемое ДК, км/с2;
τ - длительность работы ДК, с.
4. Рассчитывают длительности работы ДК.
Сумма проекций импульсов тяг первого и второго ДК на нормаль к орбите должна быть равна требуемому импульсу на проведение коррекции вектора наклонения орбиты, т.е.

С другой стороны, разность проекций импульсов тяг первого и второго ДК на трансверсаль должна быть равна требуемому импульсу на проведение коррекции периода обращения КА, т.е.

Решая совместно уравнения (1) и (2) относительно τ1 и τ2, получаем
5. Проводят коррекцию парой ДК.
Коррекции проводят последовательным включением первого ДК на τ1 секунд и второго ДК на τ2 секунд.
Импульсы Jn, Jτ определяются стратегией реального удержания КА по известным формулам, например, П.Е.Эльясберг «Введение в теорию полета ИСЗ», М.: Наука, 1965 г.
где Jτ - требуемый импульс на проведение коррекции периода обращения КА, кг·км/с;
m - масса КА, кг;
µ - гравитационный параметр Земли, км3/с2;
ΔТ - требуемое изменение периода обращения за коррекцию, с;
R - радиус номинальной геостационарной орбиты, км,
а также, Г.М.Чернявский, В.А.Бартенев, В.А.Малышев «Управление орбитой стационарного спутника», M.: Машиностроение, 1984 г., стр.129, 138. Моменты включений ДК определяются из условия, чтобы середина интервала работы ДК соответствовала точке оптимального приложения импульсов. При непрерывной коррекции двумя ДК на геостационарной орбите можно воспользоваться следующими рабочими формулами (все угловые величины выражены в радианах):
 ;
;

где tвкл - время начала коррекции, секунды от опорной эпохи;
t0 - некоторое начальное время, секунды от опорной эпохи;
αвкл=arctg[Δiy·sign(a z)/Δix·sign(a z)] - прямое восхождение середины активного участка;
Δiy, Δix - требуемые составляющие изменения вектора наклонения  в координатах:
в координатах:
ix=sin(i)·cos(Ω);
iy=sin(i)·sin(Ω);
Ω - долгота восходящего узла орбиты КА;
a z - ортогональное ускорение, км/с2;
 - отклонение от точки «стояния» в момент t0;
- отклонение от точки «стояния» в момент t0;
S0 - среднее гринвичское звездное время в момент t0;
λст - долгота «стояния» КА - центр орбитальной позиции;
n - среднее движение КА, с-1;
Vcp - средняя орбитальная скорость, км/с.
Причем  - средняя между долгота между долготой перигея и апогея орбиты.
- средняя между долгота между долготой перигея и апогея орбиты.
Приведенный «Способ одновременной коррекции удержания вектора наклонения орбиты и периода обращения трехосностабилизированного космического аппарата» на сегодня имеет недостатки:
1. Коррекции проводят, как правило, последовательными включениями ДК выбранной пары относительно полуосей нормали к орбите. Но задача удержания по долготе только такими включениями, как показала практика, не решается. При ежесуточных коррекциях наклонения орбиты довольно часто из-за грубых ошибок управления центром масс КА, к которым относятся:
- ошибка реализации и знания тяги;
- ошибка определения основного контролируемого параметра движения - периода обращения,
назревает необходимость проведения коррекции периода обращения «долготными» ДК, расположенными относительно полуосей трансверсали, которые, по идее, должны бы использоваться лишь для коррекций эксцентриситета орбиты.
2. В отсутствие автономной навигации или ежесуточных траекторных измерений с помощью наземного комплекса управления невозможно качественно удерживать КА на орбите в узкой области по долготе. На интервале периодичности траекторных измерений более 15 суток к погрешностям определения параметров движения центра масс КА добавляются в разы большие погрешности прогнозирования этих параметров с учетом ошибок реализации тяги к концу указанного интервала. Без автономной навигации способ-прототип в стратегии удержания все тот же способ автоматических коррекций - погрешности удержания все те же. А нет улучшения качества удержания - любой способ мало чего стоит. В настоящее время испытывается высокоточная автономная радионавигация. Однако и ей необходимы независимые определения ускоряющих воздействий от работы ДК. Уточнение не позволяет определять управляющие ускорения точнее диапазона значений ускорений, оговоренных заводом-изготовителем. Оно гарантирует отслеживание аномальной работы ДК, и в случае затяжной и, возможно, постоянной ситуации, когда (пока) отказ ДК не зафиксирован на борту КА, все-таки рассчитывает план коррекций. При уточнении применяется эвристический метод: есть начальные условия (НУ) движения по предыдущему ИТНП, есть текущие НУ, есть предыдущий план коррекций, включающий в себя до трех условных номеров ДК, решается задача прихода в текущие НУ без больших погрешностей по контролируемым параметрам движения.
Вообще, качество управления резко повысится, если удастся общую ошибку управления центром масс КА явно разложить на составляющие и организовать их компенсацию. В отношении реализации и знания тяги ДК прототип не дает удовлетворительные результаты.
Целью предлагаемого изобретения является создание надежного способа, не зависящего от технических характеристик бортовой аппаратуры и физического состояния ДК, повышение точности коррекций параметров движения центра масс КА до безусловных 3%, гарантированный резерв сужения пределов удержания геостационарных КА на орбитальной позиции и уменьшение энергозатрат на удержание.
Поставленная цель достигается тем, что в способе удержания геостационарного КА на заданной орбитальной позиции, включающем определение требуемого угла отклонения вектора тяги ДК от нормали к орбите в плоскости рысканья, исходя из обеспечения заданной точности исполнения коррекции периода обращения КА и требуемых изменений за коррекцию трансверсальной и ортогональной составляющих вектора скорости КА, задание отклонения направлений векторов тяги ДК введены новые операции, заключающиеся в том, что: увеличивают срок управления центром масс КА без привлечения наземных средств измерения текущих навигационных параметров (ИТНП) с 15 до 30 суток и тем самым на средствах наземного комплекса управления рассчитывают план коррекций движения центра масс КА на месяц; рассчитывают план коррекций движения центра масс КА работой одного ДК на каждом шаге плана; на каждом шаге фиксируют начало свободного движения на борту КА инерционной массы в замкнутой емкости; фиксируют окончание свободного движения инерционной массы в замкнутой емкости; управляющее ускорение определяют из уравнения равноускоренного движения без начальной скорости по заранее известному пути в этой емкости; определяют длительность текущей работы ДК из соотношения:

где а - текущее ускорение, км/с2;
τH - длительность работы ДК, рассчитанная с учетом а H,с;
a H - принятый при расчете плана коррекций номинал ускорения, км/с2;
уточняют время выключения и в уточненное время подают команду на выключение ДК; замкнутая емкость представляет прибор определения линейного ускорения, который содержит: сферический корпус, внутри которого расположена с зазором внутренняя сфера; подвес внутренней сферы, связывающий ее с корпусом и состоящий из четырех подпружиненных штырей, равномерно разнесенных по поверхности внутренней сферы, закрепленных на ней, свободно проходящих сквозь люфтовые отверстия в корпусе; с внешней стороны корпуса - электромагниты в количестве, кратном двум, по числу осей установок ДК коррекции движения центра масс КА; в качестве инерционной массы - магнитовосприимчивый шарик, находящийся во внутренней сфере, внешняя электрическая схема предусматривает включение-отключение выбираемых электромагнитов и фиксацию моментов отключения электромагнита и размыкания электроконтакта (начало движения шарика) и замыкания одного из электроконтактов при нажиме шарика в каком-либо месте на поверхность внутренней сферы в конце его движения, при этом отношение инерционной массы к общей массе внутренней сферы и подпружиненных штырей равно 10:1.
Реализация предлагаемого способа предполагает выполнение следующей последовательности операций:
1. Увеличивают срок управления центром масс геостационарного КА без привлечения наземных средств ИТНП с 15 до 30 суток.
За один шаг плана коррекций наклонения при существующих уровне тяги ДК на всех геостационарных КА (7-9)·10-2Н с массой более 2,5 т и углах установки (θ1, θ2) (п.2 прототипа) (5-6)° приращение сидерического периода обращения геостационарного КА (интервал времени между последовательными прохождениями КА плоскости в инерциальном пространстве, перпендикулярной земному экватору) составляет ~1 с, не более. Значит, при предлагаемом уровне погрешности реализации импульса не более 3% (см. ниже «Обоснование методической погрешности предлагаемого акселерометра») будем иметь менее 0,03 с от ошибки знания ускорения от работы (тяги) ДК; за 1 месяц (суммирование модулей ошибок по максимуму невероятно!, но, все-таки) будем иметь 0,9 с; уход по долготе за 30 суток (см. аналог [1]) составит 3,375 угл. мин, не более. Для области удержания по долготе ±0,1° - это более чем хороший результат. Однако реальная погрешность в «Обосновании…» 1-2% и в структуре погрешности определения ускорения систематическая составляющая, можно предположить, составляет порядка 70% [эти проценты выявляются при реальной работе, к тому же имеет место автоматическая компенсация систематических ошибок за счет «разнотяговости» (выдаче примерно равных по значению и противоположных по направлению импульсов тяги при реализации плана коррекций) - это реальный резерв повышения точности удержания КА], таким образом, суммарное приращение периода обращения за 1 шаг плана коррекций должно составить не более (1 X 0,02 Х 0,3), т.е. 0,006 с, и уход по долготе за 30 суток составит 0,675 угл. мин. Словом, удержание в области ±0,05° в течение месяца в неавтономном режиме или в отсутствие автономной навигации вполне реально. Летные испытания, возможно, позволят рассчитывать на проведение ИТНП раз в 2-3 месяца.
2. Рассчитывают план коррекций движения центра масс КА работой одного ДК на каждом шаге плана.
План коррекций движения центра масс КА рассчитывается на средствах наземного комплекса управления, после чего его засылают на борт КА для последующей отработки с помощью бортового программного навигационного обеспечения полета. Отказ от работы парой ДК на шаге плана существенно упрощает работу борта и экономит ресурс включений ДК, при этом «зрячий» процесс удержания КА, даже с намеренной точностью выхода на оптимальное значение корректируемого параметра движения, не превышающей суточной нормы изменения этого параметра, не приводит к неудовлетворительным результатам удержания.
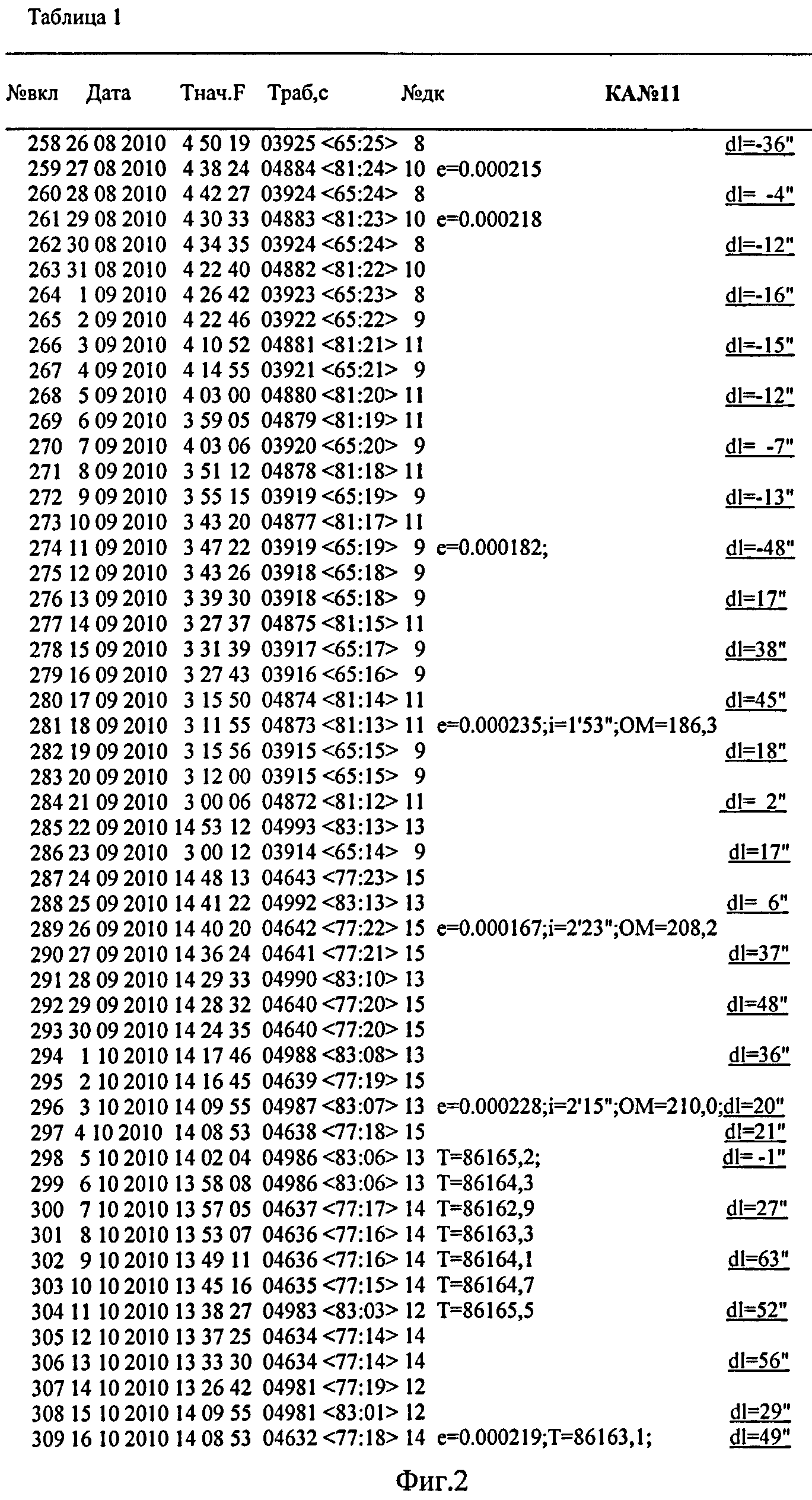
Возможны два варианта планирования коррекций: один вариант - работа на каждом шаге парой ДК согласно прототипу [2] с уточнением ускорений и включением их в расчет параметров коррекции после очередного ИТНП, и тогда обеспечивается, на интервале до 15 суток, идеальное удержание КА по долготе и наклонению; другой вариант - работа на каждом шаге одним ДК согласно данной циклограмме работ с КА, и тогда обеспечивается, на интервале 30 суток, при близких к нулевым ошибках знания параметров движения (это реализуется в данном способе корректировкой длительности текущей работы ДК, ввиду возможности оперативно определять текущие значения ускорений от работы ДК, или, равнозначно, - наличием на борту автономной системы радионавигации), удержание КА в очень узкой и удовлетворяющей всем требованиям международного регламента удержания геостационарных КА области относительно орбитальной позиции, именно, ±1 угл. мин по средней долготе ½(λπ+λа) и ±2 угл. мин по наклонению (см. приложение - фиг.2, фиг.3), при этом экономится ресурс включений ДК. Причем в отношении наклонения требуемый на удержание импульс, в части компенсации суточных уходов наклонения, выдается всегда в полном объеме на каждом шаге плана коррекций за исключением шагов, когда необходимо проведение коррекции эксцентриситета или долготной коррекции (коррекции собственно периода обращения), в этих случаях задержку коррекций наклонения компенсируют увеличенным импульсом тяги ДК наклонения при составлении нового плана на последующий цикл удержания. В последнем варианте, как правило, включается ДК наклонения на время, необходимое для полной компенсации уходов наклонения орбиты или для полной шаговой нормы перевода наклонения в целевую точку. Это приводит к тому, что план коррекций состоит из групп последовательных шагов, в каждой из которых проводится от 1 до 3 включений одного и того же ДК, что, как указано выше, не оказывает существенного влияния на качество удержания КА - важно правильно выбрать стратегическую линию удержания в фазовой плоскости [Т - сидерический период обращения; λ - гринвичская восточная долгота].
3. Пошагово отрабатывают план коррекций.
Начало каждого шага - включение в расчетное время ДК согласно составленному плану, заложенному на борт КА, и, по выходу ДК на рабочий режим, - включение прибора определения линейного ускорения с фиксацией начала его работы. Ход коррекции контролируется бортовым программным обеспечением.
4. Фиксируют время пройденного инерционной массой известного расстояния при работе ДК.
На каждом шаге плана фиксируют начало свободного движения на борту КА инерционной массы в замкнутой емкости и фиксируют окончание свободного движения инерционной массы в замкнутой емкости.
5. Определяют текущее управляющее ускорение от работающего ДК. Управляющее ускорение от работающего ДК, имеющего порядковый условный номер i (ДКi), с помощью бортовой программы, входящей в состав навигационного обеспечения полета, определяют по формуле:

где S - пройденное инерционной массой расстояние внутри замкнутой емкости, известное заранее из условия расположения геометрической оси работающего ДК, м;
t - время, за которое инерционной массой пройдено расстояние S, как разница времен окончания и начала движения инерционной массы, с.
6. Рассчитывают длительность корректирующего воздействия.
Операция проводится во время проведения коррекции, длительность которой составляет от 10 мин до 2 ч ежедневно при уровне тяги (7-9)·10-2 H. Длительность текущей работы ДКi τ определяют из соотношения:
где а i - ускорение, определенное по п.5 предлагаемого способа, км/с2;
 - длительность работы ДКi, рассчитанная с учетом
- длительность работы ДКi, рассчитанная с учетом  , с;
, с;
 - принятый в расчет плана коррекций номинал ускорения от ДКi, км/с2.
- принятый в расчет плана коррекций номинал ускорения от ДКi, км/с2.
7. По длительности корректирующего воздействия уточняют время выключения и подают в уточненное время команду от бортового комплекса управления на выключение ДК.
8. Проводят траекторные измерения - ИТНП.
9. Выполняют программу определения параметров движения центра масс КА.
10. Выполняют программу расчета (составления) плана коррекций удержания КА работой одного ДК на каждом шаге в окрестности орбитальной позиции на интервале от даты расчета до начала следующего штатного цикла ИТНП.
П.10 аналогичен п.2.
11. Выполняют программы генерации массивов командно-программной информации (КПИ), содержащих НУ (вектор кинематических параметров движения), план коррекций, проекции ускорений от ДК на оси связанной с КА системы координат. Конкретные значения а н по каждому ДК нужны для бортового прогноза
движения КА в целях обеспечения задач систем ориентации и энергообеспечения.
12. Засылают обобщенную форму КПИ на борт КА.
П.п.3-7 - функции бортового комплекса управления и бортового навигационного обеспечения.
Далее п.п.3-12 повторяются в течение всего времени работы КА в неавтономном режиме управления центром масс КА, а при отсутствии автономной навигации - в течение времени работы КА по целевому назначению.
Условием решения поставленной задачи является использование устройства, дающего высокую точность определения линейного ускоряющего воздействия в условиях невесомости. Ввиду того, что поиск такого устройства не дал положительного результата, приводится пример-предложение технического решения такого устройства.
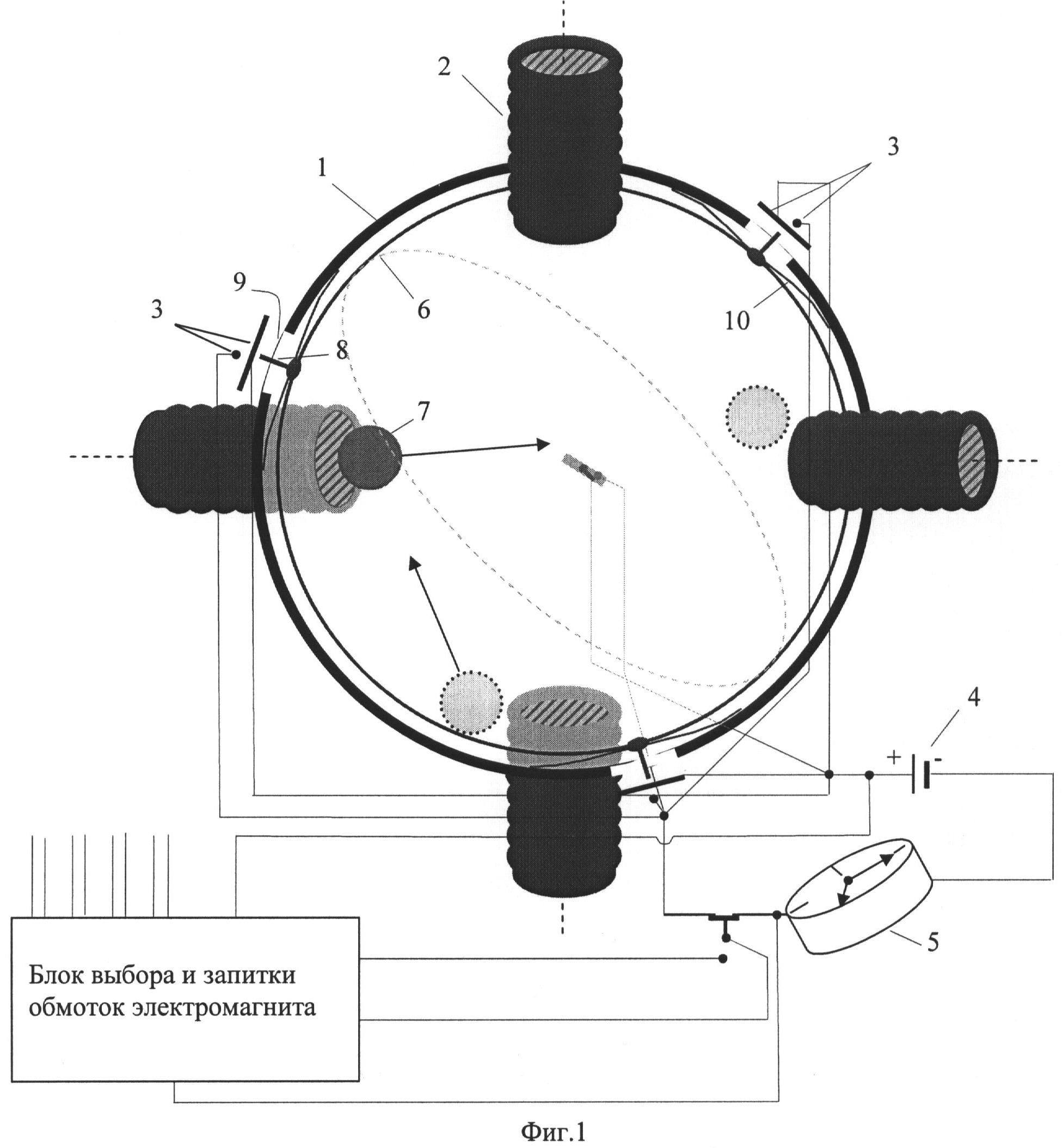
Технический результат достигается за счет использования бортового прибора определения линейного ускорения - высокоточного космического акселерометра (ВКА), например, представленного на фиг.1. Прибор позволяет с высокой точностью определять управляющие ускорения от работы ДК. На фиг.1 представлена его электрокинематическая схема. Введены следующие обозначения:
1 - корпус ВКА;
2 - электромагниты;
3 - электроконтакты;
4 - источник постоянного тока;
5 - синхронизатор времени;
6 - внутренняя сфера;
7 - инерционная масса - магнитовосприимчивый шарик;
8 - штыри;
9 - люфтовые отверстия;
10 - пластинчатые пружины.
Прибор имеет: внешнюю 1 и внутреннюю 6 полые сферы, последняя имеет подвес-контакт из четырех подпружиненных штырей 8, равномерно разнесенных по ее поверхности, закрепленных на ней, связывающих ее с корпусом 1 - внешней сферой, свободно проходящих сквозь люфтовые отверстия 9 в корпусе, замыкающих/размыкающих электрические контакты 3; электромагниты 2, подбирающие на старт магнитовосприимчивую инерционную массу 7; электрическую цепь, в состав которой входят синхронизатор событий 5, блок выбора электромагнитов и переключатель режимов работы «Начало движения инерционной массы (отключение электромагнита и размыкание электрического контакта)»/«Конец движения инерционной массы (замыкание электрического-контакта)». Перед началом рабочего цикла осуществляется подбор инерционной массы из полости внутренней сферы выбранным и включенным электромагнитом, зная расположение электромагнита в привязке к спутниковой системе координат и угол установки ДК движения центра масс КА, следовательно, - зная заранее расстояние, которое проходит шарик внутри сферы, и время прохождения этого расстояния, как разность (t2-t1), будем иметь значение ускорения от работы данного ДК при соответствующих размерах замкнутой емкости с относительной погрешностью менее 3%.
Количество подпружиненных штырей 8 должно быть именно четыре, поскольку это, с одной стороны - достаточный минимум для пространственного равноправного подвеса, с другой стороны - гарантия того, что при завершении рабочего цикла сработает только один электоконтакт 3, с третьей стороны - минимизация сопротивления при скольжении поверхностей одной сферы относительно другой при движении штырей 8 в люфтовых отверстиях 9 во внешней сфере 1 (корпусе ВКА).
Пружины 10 должны быть именно пластинчатые, т.к. они надежнее витых пружин и занимают в узком пространстве между сферами мало места.
Источник постоянного тока 4 может быть представлен любой типовой схемой, удовлетворяющей заданным параметрам силы электромагнитов, притягивающих на старт инерционную массу.
Масса шарика 7 (рабочая инерционная масса) составляет порядка 1 кг. Масса внутренней сферы 6 вместе с системой подвеса - подпружиненными штырями 8 равна 1/10 рабочей инерционной массы - порядка 0,1 кг. Зазор между сферами должен составлять не более 5 мм, тогда пластинчатые пружины 10 подпружиненных штырей 8 в начале рабочего цикла, когда выбранный электромагнит 2 вместе с шариком 7 заодно притягивает к внешней сфере 1 (корпусу прибора) и внутреннюю сферу 6, не смогут создать заметных реакций сопротивления. Внутренняя сфера 6 всегда восстанавливает свое исходное положение относительно внешней сферы 1 (корпуса прибора). За весь рабочей цикл затрачивается работа:
 ,
,
где индексы «н» (номинал) и «пруж» относятся соответственно к движению только под действием ускорения от работы ДК и только пружин;
индексы «|» и «||» относятся соответственно к участкам движения в начале рабочего цикла и движению до замыкания электроконтакта в конце рабочего цикла.
При движении инерционной массы по диаметральному пути в начале рабочего цикла пружина выталкивает массу 1,1М (М - масса шарика), а в конце (положение подпружиненной внутренней сферы стабилизировано, и ситуацию правомочно представлять как неупругий удар) - сопротивляется массе 1,1М, тогда  , и результирующее действие пружинного подвеса в рабочем цикле равно нулю. Значит, влиянием пружин можно пренебречь полностью. При движении по наихудшему сценарию, когда угол установки оси ДК относительно оси выбранного электромагнита ВКА равен 45°, суммарное влияние пружин оценивается в
, и результирующее действие пружинного подвеса в рабочем цикле равно нулю. Значит, влиянием пружин можно пренебречь полностью. При движении по наихудшему сценарию, когда угол установки оси ДК относительно оси выбранного электромагнита ВКА равен 45°, суммарное влияние пружин оценивается в  , т.е. в
, т.е. в  . Для примера, масса шарика М=1 кг, номинал ДК коррекции ~ 0,1Н, ему соответствует ускорение 1·10-4 м/с2 КА с массой 1000 кг, и
. Для примера, масса шарика М=1 кг, номинал ДК коррекции ~ 0,1Н, ему соответствует ускорение 1·10-4 м/с2 КА с массой 1000 кг, и  - движется, на самом деле, не шарик, а КА! Сила упругости пружины должна уравновешивать силу действия на пружину внутренней сферы, движущейся в разрешенном диапазоне 5 мм с ускорением, создаваемым ДК, причем в самом начале, в 1/10 стрелы прогиба пружины - для стабилизированного положения внутренней сферы и исключения несанкционированных замыканий электроконтактов, значит, эта сила в полном прогибе пружины должна быть 10-4 М, не менее, в частности, 1·10-4 Н, и
- движется, на самом деле, не шарик, а КА! Сила упругости пружины должна уравновешивать силу действия на пружину внутренней сферы, движущейся в разрешенном диапазоне 5 мм с ускорением, создаваемым ДК, причем в самом начале, в 1/10 стрелы прогиба пружины - для стабилизированного положения внутренней сферы и исключения несанкционированных замыканий электроконтактов, значит, эта сила в полном прогибе пружины должна быть 10-4 М, не менее, в частности, 1·10-4 Н, и  . Относительная погрешность знания (или незнания) реакции пружин составляет 0,29·(5·10-7/5·10-4)·100, т.е., 0,029%, не менее, а относительно общей работы за цикл Аобщ и того меньше (0,5·10-3%). Поскольку реальные характеристики КА, двигательной установки и акселерометра не далеки от вышеприведенного примера, можно сделать вывод: при конструировании акселерометров вовсе не следует добиваться того, чтобы оси электромагнитов акселерометра ВКА и посадочные оси двигателей КА были соответственно параллельными, хотя оптимизация взаимного расположения осей электромагнитов ВКА и осей двигателей желательна исходя из нижеприведенного обоснования методической точности акселерометра.
. Относительная погрешность знания (или незнания) реакции пружин составляет 0,29·(5·10-7/5·10-4)·100, т.е., 0,029%, не менее, а относительно общей работы за цикл Аобщ и того меньше (0,5·10-3%). Поскольку реальные характеристики КА, двигательной установки и акселерометра не далеки от вышеприведенного примера, можно сделать вывод: при конструировании акселерометров вовсе не следует добиваться того, чтобы оси электромагнитов акселерометра ВКА и посадочные оси двигателей КА были соответственно параллельными, хотя оптимизация взаимного расположения осей электромагнитов ВКА и осей двигателей желательна исходя из нижеприведенного обоснования методической точности акселерометра.
Обоснование методической погрешности предлагаемого акселерометра.
Ускорение определяется из уравнения равноускоренного движения при отсутствии начальной скорости движения тела:
где S - пройденное расстояние, м;
t=t2-t1, с.
Дифференцируем (3) и переходим к уравнению ошибок:
Диаметр (D) внутренней поверхности корпуса 1 прибора - внешней сферы (265-285)мм, не меньше, с учетом имеющихся в настоящее время уровней малых тяг ДК и того, что необходимо время движения инерционной массы (точнее сферы, относительно неподвижного в инерциальном пространстве шарика), фиксация которого давала бы относительную ошибку не более 1%. Наиболее критичным будет угол установки (α) ДК 45° относительно осей электромагнитов ВКА. Это сокращает номинальное рабочее расстояние против диаметрального в 1,4 раза.
1. Рассмотрим первое слагаемое в уравнении (4) - составляющую погрешности ускорения от единственно действующего на пройденное расстояние шариком нерасчетного фактора - работы системы ориентации и стабилизации (СОС) КА.
КА в процессе эксплуатации производит эволюции вокруг центра масс согласно логике работы СОС. ВКА может быть расположен от центра масс КА на удалении, гарантированно не превышающем 1 м. Погрешность поддержания ориентации КА в пространстве не превышает 0,1°. Это значит, что реальная точка соприкосновения шарика в конце пройденного пути шарика/сферы может отстоять от расчетной точки на расстоянии, не превышающем l=1000·sin 0,1°=1,75 мм, что, в свою очередь, означает погрешность в знании пройденного расстояния:
 , при α=0, тогда ΔS=0,006 мм, и δS=0,002%;
, при α=0, тогда ΔS=0,006 мм, и δS=0,002%;
исходя из теоремы косинусов
 , при α=45°, тогда ΔS=1,23 мм, и δS=0,62%.
, при α=45°, тогда ΔS=1,23 мм, и δS=0,62%.
В наихудшем варианте S=(0,1874-2d),м, где d - зазор между сферами (не более 5 мм) + радиус шарика (инерционной массы), тогда номинальное время движения шарика исходя из номинала тяги ДК коррекции 0,1Н и соответствующего ему (1,0-0,5)·10-4 м/с2 ускорения КА с массой (1000-2000) кг составляет не менее 51,45 с при d=0,055 м.
Максимальный вклад в Δа составляет 9,3·10-7 м/c2.
2. Рассмотрим второе слагаемое в уравнении (4) - составляющую погрешности ускорения от точности привязки событий, т.е. - от точности фиксации времен t1 и t2.
Погрешность снятия бортового времени составляет 0,25 с. Это и следует считать значением Δt в уравнении (4). Тогда δt=0,48%, и вклад в Δа составляет 9,7·10-7 м/c2.
Исходя из всего сказанного максимальная погрешность определения ускорения составляет 1,9·10-6 м/c2, и относительная погрешность определения ускорения составляет менее 3%, при наиболее вероятной 1-2%, что позволяет именовать данный акселерометр высокоточным. Далее, ВКА является именно космической техникой, поскольку в условиях гравитации он работать не может, что позволяет именовать данный акселерометр космическим.
Предлагаемый способ удержания геостационарного КА позволяет:
1) определять управляющие ускорения без лишних затрат и с высокой точностью, последовательно - по мере необходимости, для каждого ДК;
2) практически полностью исключить необходимость проведения коррекции периода обращения ДК долготы, чем снизить энергозатраты;
3) повысить точность удержания по долготе с ±0,1° до гарантированной ±0,05°;
4) гарантированно увеличить срок управления центром масс КА в неавтономном режиме (от одних траекторных измерений до других) с 15 до 30 суток;
5) считать:
- приведенный способ удержания геостационарного КА на заданной орбитальной позиции способом, обеспечивающим минимальный срок баллистического обеспечения полета КА в автономном режиме;
- приведенный способ удержания геостационарного КА на заданной орбитальной позиции, при наличии бортовой системы радионавигации, резервным вариантом автономного баллистического обеспечения полета КА.
Способ удержания геостационарного космического аппарата (КА) на заданной орбитальной позиции, включающий определение требуемого угла отклонения вектора тяги двигателя от нормали к орбите в плоскости рысканья, исходя из обеспечения заданной точности исполнения коррекции периода обращения космического аппарата и требуемых изменений за коррекцию трансверсальной и ортогональной составляющих вектора скорости космического аппарата, задание отклонения направлений векторов тяги двигателей, отличающийся тем, что увеличивают срок управления центром масс КА без привлечения наземных средств измерения текущих навигационных параметров до одного месяца; рассчитывают план коррекций движения центра масс КА работой одного двигателя коррекции на каждом шаге плана; на каждом шаге фиксируют начало свободного движения на борту КА инерционной массы в замкнутой емкости; фиксируют окончание свободного движения инерционной массы в замкнутой емкости; управляющее ускорение определяют из уравнения равноускоренного движения без начальной скорости по заранее известному пути в этой емкости; определяют длительность текущей работы двигателя коррекции τ из соотношения: где а - текущее ускорение, км/с;τ - длительность работы двигателя, рассчитанная с учетом а, с;а - принятый при расчете плана коррекций номинал ускорения, км/с;уточняют время выключения и в уточненное время подают команду на выключение двигателя; при этом замкнутая емкость содержит: сферический корпус, внутри которого расположена с зазором внутренняя сфера; подвес внутренней сферы, связывающий ее с корпусом и состоящий из четырех подпружиненных штырей, равномерно разнесенных по поверхности внутренней сферы, закрепленных на ней, свободно проходящих сквозь люфтовые отверстия в корпусе; с внешней стороны корпуса - электромагниты в количестве, кратном двум, по числу осей установок двигателей коррекции движения центра масс КА; в качестве инерционной массы - магнитовосприимчивый шарик, находящийся во внутренней сфере, внешняя электрическая схема предусматривает включение-отключение выбираемых электромагнитов и фиксацию моментов отключения электромагнита и размыкания электроконтакта (начало движения шарика) и замыкания одного из электроконтактов при нажиме шарика в каком-либо месте на поверхность внутренней сферы в конце его движения, при этом отношение инерционной массы к общей массе внутренней сферы и подпружиненных штырей равно 10:1.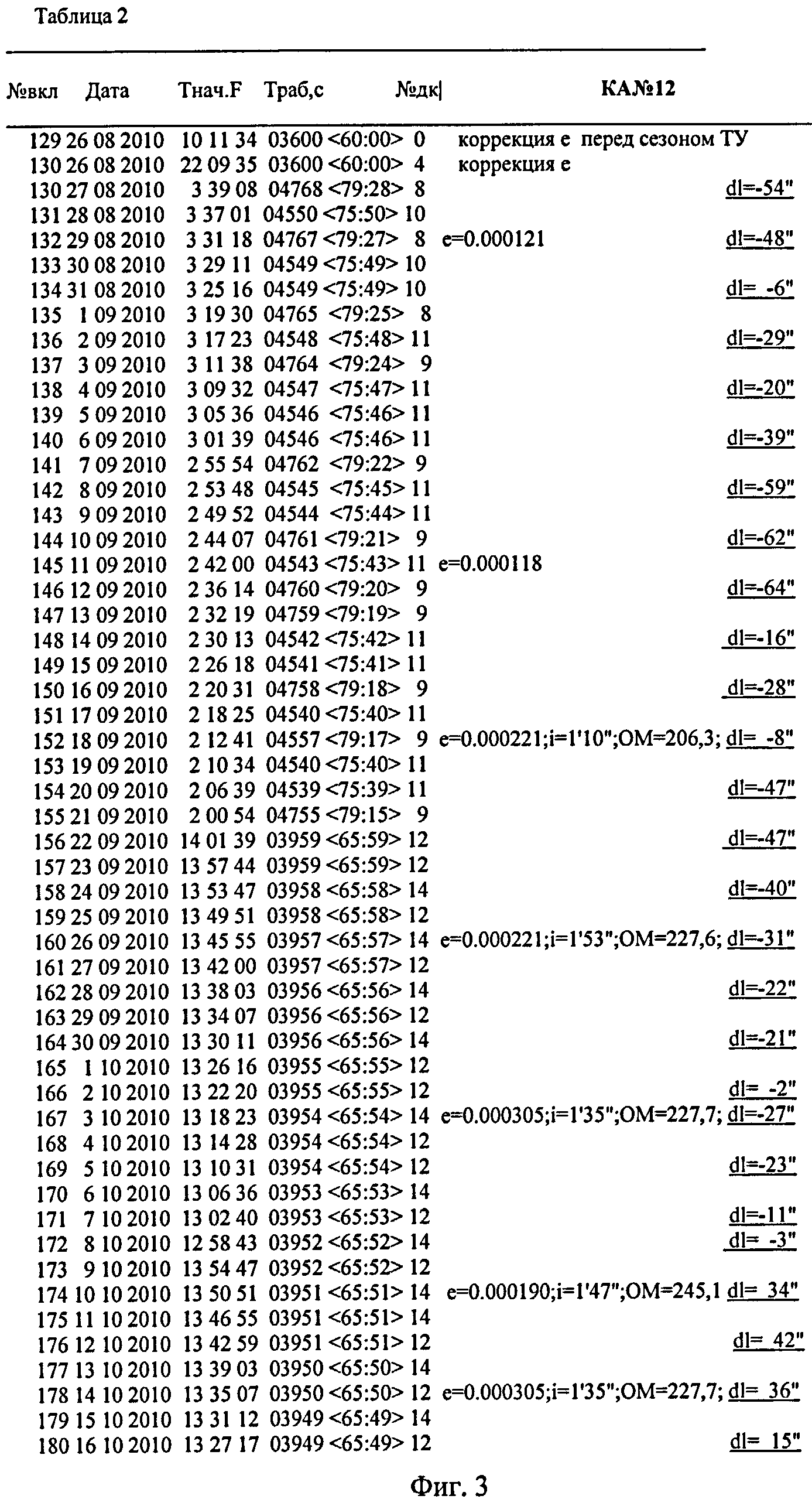

Электромеханический привод раскрытия
Способ работы электропривода с трехступенчатым планетарным редуктором
Цифровой феррозондовый магнитометр
Способ имитации солнечного излучения в термобарокамере
Способ испытаний бортовой аппаратуры космического аппарата на вибрационные воздействия
Способ питания нагрузки постоянным током в автономной системе электропитания искусственного спутника земли
Способ регулирования и стабилизации давления в рабочих установках сильфонного типа
Контейнер
Электропривод с трехступенчатым планетарным редуктором
Электропривод с трехступенчатым планетарным редуктором
Электромеханический привод раскрытия
Способ работы электропривода с трехступенчатым планетарным редуктором
Цифровой феррозондовый магнитометр
Способ имитации солнечного излучения в термобарокамере
Способ испытаний бортовой аппаратуры космического аппарата на вибрационные воздействия
Способ питания нагрузки постоянным током в автономной системе электропитания искусственного спутника земли
Способ регулирования и стабилизации давления в рабочих установках сильфонного типа
Контейнер
Электропривод с трехступенчатым планетарным редуктором
Электропривод с трехступенчатым планетарным редуктором

