Результат интеллектуальной деятельности: СПОСОБ ТЕСТИРОВАНИЯ ДВИГАТЕЛЕЙ КОРРЕКЦИИ КОСМИЧЕСКОГО АППАРАТА
Вид РИД
Изобретение
Предлагаемое изобретение относится к области космической техники и может быть использовано для коррекции параметров движения космического аппарата (КА).
1. Предприятию из уровня техники известен способ коррекции элементов орбиты геостационарных космических аппаратов, основанный на определении тяг двигателей по данным траекторных наземных измерений. Суть данного способа заключается в следующем.
1. Проводят траекторные измерения.
Траекторные измерения проводят с использованием средств наземного комплекса управления (НКУ), взаимно разнесенных по территории РФ на значительные расстояния. Траекторные измерения могут проводиться как радиотехническими, так и оптическими средствами, при этом измеряемыми параметрами могут быть наклонная дальность (пункт измерения - КА), скорость изменения наклонной дальности, а также экваториальные координаты - прямое восхождение и склонение КА.
Измерительная информация передается по каналам связи с измерительных пунктов НКУ в баллистические центры, в которых производится обработка этой информации и определение фактических элементов орбиты КА.
Траекторные измерения представляют собой штатный цикл измерений текущих навигационных параметров (ИТНП), количество сеансов измерений и количество интервалов между сеансами составляет для суточного интервала и наличия двух пунктов наземных измерений от 4 до 6.
2. Прикладывают тестовое воздействие.
Для этого в запланированное время производят включение двигателя коррекции (ДК) требуемого направления тяги и отрабатывают импульс, обеспечивающий изменение корректируемого параметра, например периода обращения.
Длительность тестового воздействия выбирается такой, чтобы она, с одной стороны, приводила к небольшим изменениям элементов орбиты, а с другой стороны, чтобы эти изменения были достаточными для надежного определения по ним величины тяги ДК. Так, например, при тяге двигателя 0,08 Н (8 гс) длительность тестового воздействия для КА с массой 2000 кг на геостационарной орбите составляет порядка 2 ч, а соответствующий транверсальный импульс ~575 Нс, что соответствует изменению периода обращения КА, в зависимости от углов установки ДК, на (2,5-24,5) с. При ошибке определения этого параметра 0,1 с погрешность определения тяги составляет менее 5% - хороший результат. Случайная составляющая погрешности реализации тяги составляет 3%, значит истинная тяга определится с погрешностью F(1±0,03)·0,05=0,05F, т.е. те же 5%.
3. Проводят траекторные измерения.
Траекторные измерения проводят аналогично п.1. Тяга ДК определяется по фактической величине изменения корректируемого параметра - периода обращения.
4. Определяют фактическую величину изменения корректируемого параметра и определяют тягу ДК.
Тяга ДК определяется по фактической величине изменения корректируемого параметра - периода обращения.
По мере необходимости пп.1-4 повторяют для каждого ДК двигательной установки коррекции.
Через некоторый промежуток времени, так как на сроке активного существования КА систематическая составляющая тяги непостоянна, повторяют полный цикл (пп.1-4) тестирования всех ДК.
5. Прикладывают корректирующее воздействие.
Для этого в расчетное время производят включение ДК требуемого направления тяги. При этом длительность работы ДК устанавливают исходя из значения тяги, полученного при тестовом включении. В результате включения ДК обеспечивается изменение корректируемого параметра, например периода обращения КА. Однако, в связи с тем, что тяга двигателя коррекции может меняться, достижение требуемого значения корректируемого параметра, как правило, не может быть осуществлено за одно приложение корректирующего воздействия.
6. Проводят траекторные измерения и уточняют тягу ДК. Операцию проводят аналогично пп.3, 4.
7. Прикладывают корректирующее воздействие.
Производят включение ДК требуемого направления тяги на время, определенное исходя из тяги ДК, полученной по тестовому и предыдущему включениям.
При необходимости пп.6, 7 повторяют до достижения требуемой точности корректируемого параметра.
Недостатком способа 1 является то, что:
1 - полный цикл тестирования всех ДК, число которых с учетом резервных схем достигает на КА до 16 условных номеров, совокупно растягивается, по крайней мере, на месяц и включает в себя дополнительно к штатному расписанию 16 штатных циклов ИТНП;
2 - требуемое значение корректируемого параметра достигается, как правило, за две коррекции в течение 2-х суток, при этом требуется планирование двух штатных циклов ИТНП.
Это очень затратный способ, от которого, хотя он и предельно надежен, по возможности надо отходить. Он применялся, когда коррекции параметров орбиты КА проводились не чаще одного раза в месяц. В настоящее время, когда коррекции параметров орбиты КА могут проводиться с частотой раз в сутки и даже менее, можно утверждать, что:
1 - в отсутствие автономной бортовой навигации либо возможности ежесуточных ИТНП средствами НКУ способ практически не применим;
2 - при наличии автономной бортовой навигации либо возможности ежесуточных ИТНП средствами НКУ имеется более эффективный способ определения (уточнения) тяги ДК, изложенный ниже.
2. В практике ОАО «ИСС» чаще используется другой способ уточнения тяг ДК. В нем применяется эвристический подход: есть начальные условия (НУ) движения по предыдущему ИТНП, есть текущие параметры (условия) движения, есть отработанный план коррекций, включающий в себя до двух условных номеров ДК, решается задача прогнозирования движения (прихода в текущие условия движения) без больших погрешностей. В способе-аналоге 2 выполняется следующая последовательность операций (несущественные детали опускаются).
1. Отрабатывается план коррекций.
2. Проводят траекторные измерения.
При наличии автономной (бортовой) радионавигации траекторные измерения ведутся в непрерывном режиме.
3. Выполняют программу определения параметров движения центра масс КА.
4. Уточняют управляющие ускорения по изменению орбитальных параметров. Уточнение не позволяет определять управляющие ускорения точнее диапазона значений ускорений, оговоренных заводом-изготовителем. Оно гарантирует отслеживание аномальной работы ДК, и, в случае затяжной и, возможно, постоянной ситуации, когда (пока) отказ ДК не зафиксирован на борту КА, все-таки рассчитывать план коррекций.
5. Выполняют программу расчета (составления) плана коррекций КА на шаговый интервал.
Шаговый интервал составляет 1 сутки - при наличии автономной бортовой навигации либо ежесуточных ИТНП (в общем - ежесуточных траекторных измерений - ЕТИ) и более суток - при отсутствии ЕТИ.
6. В зависимости от организации баллистического обеспечения полета КА на борт КА заносятся план коррекций и управляющие ускорения либо только уточненные управляющие ускорения.
Далее пп.1-6 повторяются в течение всего времени работы КА по целевому назначению.
Погрешность такого способа превышает погрешность, оговоренную заводом-изготовителем двигательной установки. Дело в том, что определение тяги двух ДК на интервале плана (от 1 суток) и даже определение тяги одного ДК, при единичном включении малой (как правило) длительности при ЕТИ, представляет не решаемую удовлетворительно задачу. Задача определения тяги более двух ДК решения не имеет. При наличии ЕТИ принципиально важно, что при расчете параметров коррекции (одно-два включения двигателя(ей) на суточном интервале) всегда исходят из того, что изменение контрольного корректируемого параметра, которым чаще всего выступает период обращения (он изменяется всегда - при коррекциях долготы и при коррекциях наклонения), можно считать свободным от ошибок управления центром масс КА, поскольку последние не успевают влиять на результаты коррекций, поскольку ЕТИ исключает возможность их накопления. Однако использование контрольной (в части определения периода обращения) плоскости, например, для геостационарного КА, традиционно совпадающей с плоскостью XOZ инерциальной геоцентрической экваториальной системы координат (ось X направлена в точку Весны) при проведении ежесуточных коррекций и ЕТИ, не позволяет полностью исключить методические погрешности расчета периода обращения и его изменения за коррекцию, первая из которых может сильно сказываться на качестве процесса удержания КА. Ошибка ΔТ1 определения сидерического периода обращения оценивается для средств траекторных измерений в 0,1 с; изменение периода за коррекцию [наклонения] орбиты на сутках номинально составляет (1-2) с, и уточнение ускорений от работы двигателей (относительная погрешность, согласно способу 1, 5%) позволяет соответственно рассчитывать на погрешность ΔТ2 знания [изменения] периода не более 0,1 с. И ΔТ и ΔТ2 - величины небольшие, однако реальное отклонение сидерического периода обращения от ожидаемого составляет до 1,5 с. Причина объяснима на таком примере. Если середине активного участка (АУ) соответствует время tAУ, а пересечению плоскости XOZ, по сидерическому периоду обращения традиционно принимаемой за контрольную, соответствует время tXOZ, отстоящее от tAУ на полупериод (сидерический период обращения до коррекции считаем истинным), получим сидерический период, в который войдет лишь половина реализованной за коррекцию средней скорости КА, а при близких значениях tAУ и tХОZ, когда tXOZ>tАУ, в сидерическом периоде реализованная за коррекцию средняя скорость КА и вовсе не отразится. А планировать коррекции надо на каждые и каждые сутки. Указанная погрешность в 100% (1,5 с), конечно, недопустима, а если говорим о геостационарных КА, - не позволяет рассчитывать на удержание узких областей и проводить тонкую коллокацию (удержание нескольких КА в одной и той области). Такая ошибка приводит к тому, что тяга только одного ДК на шаге коррекций, состоящем из работы этого ДК, рассчитанная по данным ЕТИ (лучший вариант уточнения тяги), зачастую отличается от реальной предписываемой заводом-изготовителем более чем на величину, предписываемую тем же заводом-изготовителем (к примеру - более 11% от номинала для стационарных плазменных ДК). Такая ошибка, пусть не в полной мере, возникает при расчете параметров коррекции из-за представления, что сразу за временем пересечения контрольной плоскости следует АУ, что реализованный импульс весь должен перейти в соответствующее изменение периода обращения. В Приложении приведен соответствующий пример, в котором от НУ произведено: прогнозирование параметров пассивного движения центра масс КА на двое суток; прогнозирование параметров движения центра масс КА с тягой на АУ, расположенном сразу за tХОZ(1); прогнозирование параметров движения центра масс КА с тягой на АУ, расположенном посередине между tXOZ(1) и tXOZ(2); прогнозирование параметров движения центра масс КА с тягой на АУ, расположенном непосредственно перед tXOZ(2). Время tXOZ(0) совпадает со временем НУ.
Плюс ко всему сказанному - ошибка прогнозирования моментов пересечения контрольной плоскости из-за погрешности знания тяги ДК.
ЕТИ не позволяют, даже с грубыми знаниями тяг ДК, накапливать ошибки управления центром масс КА. Однако качество управления напрямую связано с требованиями поддержания спутниковых систем при штатной эксплуатации КА. Грубое знание тяг ДК приводит к грубым ошибкам прогнозирования движения КА, что не позволяет с помощью коррекций рассчитывать на высокое качество реализации эволюции КА на орбите.
Целью предлагаемого изобретения является создание надежного и оперативного способа определения тяги ДК и повышение точности коррекций параметров движения центра масс КА.
Поставленная цель достигается способом тестирования ДК КА, заключающимся в том, что прилагают корректирующее воздействие путем включения ДК; проводят ежесуточные траекторные измерения; определяют параметры движения центра масс КА; на выбранном, по соображениям стабильности систематической составляющей погрешности тяг ДК, интервале времени набирают статистику по наработкам ДК - фактические длительности работы и условные номера ДК, а также изменения периода обращения КА; из имеющегося набора данных выбирают те, которые удовлетворяют условию следования одного за другим включений одного и того же ДК; данные суммируют и рассчитывают средние тяги по каждому работавшему ДК; прикладывают тестовое воздействие к корпусу КА последовательными включениями двух ДК противоположного направления тяги равными импульсами, отличие от нуля реализованного приращения периода переводят в невязку по суммарному импульсу тяги, которую вносят поровну с противоположным знаком в реализованные импульсы, и получают достоверные уровни тяг работавших ДК.
Реализация предлагаемого способа предполагает выполнение следующей последовательности операций.
1. Отрабатывается план коррекций. Эта операция аналогична п.1 способа 2.
2. Проводят траекторные измерения.
Эта операция аналогична п.2 способа 2. При наличии автономной (бортовой) радионавигации траекторные измерения ведутся в непрерывном режиме.
3. Выполняют программу определения параметров движения центра масс КА. Операция аналогична п.3 способа 2.
В результате имеют интересующий период обращения КА.
4. Набирают данные по наработке ДК - фактические длительность и условный номер ДК, также - изменение периода обращения. При непрерывном процессе баллистического обеспечения полетом КА всегда имеются данные предыдущих траекторных измерений.
Интервал накопления данных выбирается по соображениям стабильности систематической составляющей погрешности тяг ДК. Он составляет порядка 2 месяцев.
5. Из имеющегося набора данных выбирают те, которые удовлетворяют условию следования одного за другим включений одного и того же ДК.
В выборку не принимаются включения ДК, между которыми произошла уточняющая смена уровня тяги.
6. Данные суммируют и рассчитывают средние тяги по каждому работавшему
ДК.
Тягу по результатам траекторных измерений рассчитывают по известным методикам, например, по формуле [П.Е.Эльясберг «Введение в теорию полета ИСЗ», М.: Наука, 1965 г.]:
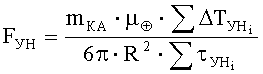 ,
,
где FУН - тяга ДК, Н;
ΔТУНi,τУНi - соответственно приращение периода обращения и длительность работы ДК с условным номером (УН) i-й строки данных, с;
mКА - масса КА, кг;
µ⊕ - гравитационный параметр Земли, м3/с2;
R - радиус круговой орбиты, м.
Суть подхода к определению тяги по изменению периода обращения заключается в том, что, если коррекции на N-суточном интервале проводятся регулярно (ежесуточно) примерно в одно и то же звездное время, одним и тем же ДК и имеют одинаковую длительность, на изменение периода обращения влияет только работа ДК, разность ошибок прогнозирования положения КА при ЕТИ на длительном интервале набора данных по наработкам ДК равна нулю.
7. Прикладывают тестовое воздействие.
Для проверки достоверности полученных тяг ДК и достаточности выбранных данных по наработке ДК необходимо провести экспериментальную сверку взаимного соответствия тяг взаимно противоположных ДК. Только после такой сверки с успешным исходом расчетные тяги можно считать реальными.
Для этого в запланированное время проводят непосредственно следующие друг за другом включения двух ДК взаимно противоположного направления тяги равными импульсами, когда длительность каждого включения обеспечивает изменение периода обращения на одну и ту же величину.
8. Проводят траекторные измерения. Эта операция аналогична п.2.
9. Выполняют программу определения параметров движения центра масс КА. По результатам определения периодов обращения до и после тестового включения ДК определяют изменение периода обращения ΔТmесm.
Операция аналогична пп.3, 4.
10. Определяют невязку по суммарному импульсу тяги.
Невязку ΔJ определяют по соотношению:
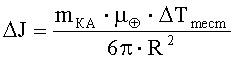 .
.
11. Невязку ΔJ вносят поровну с противоположным знаком в реализованные импульсы и получают достоверные уровни тяг работавших ДК.
Достоверные уровни тяг работающих ДК получают из соотношений:
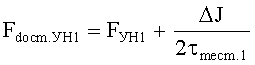 - для одного ДК из пары и
- для одного ДК из пары и
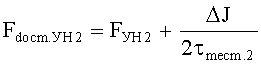 - для другого ДК из пары.
- для другого ДК из пары.
Далее пп.1-10 повторяются в течение всего времени работы КА по целевому назначению.
Следует отметить.
1. Для успешного выполнения плана коррекций требуется не только хорошее знание тяги ДК (то же - изменения корректируемого параметра движения), но и точное прогнозирование параметров движения на момент расчета параметров коррекции. Все параметры движения на любой момент времени определяются оскулирующими, т.е. мгновенными, текущими. Кроме интересующего нас периода обращения. Здесь важно иметь в виду все то, что сказано выше о положении контрольной плоскости. Однако это выходит за рамки способа тестирования ДК и относится уже к способу коррекции параметров орбиты. Да, с каким именно текущим периодом обращения имеем дело, нам неизвестно, но изменение периода обращения за коррекцию одним и тем же ДК знаем точно, следовательно, знаем хорошо тягу ДК, а это, в конце концов, оказывается самым главным в реализации баллистического обеспечения полета КА.
2. После определения достоверных значений уровней тяг пары ДК можно пользоваться всем набором данных по этим ДК, за исключением примыкающих к ним данных по другим ДК, для дальнейшего уточнения, и, что важно, полученные данные можно с успехом использовать в случае перехода в режим баллистического обеспечения полета КА, который описан в способе 2, т.е. когда траекторные измерения (ИТНП) проводятся раз неделю и реже.
Предлагаемый способ тестирования ДК КА позволяет определять тяги (управляющие ускорения) без лишних затрат и с высокой точностью, последовательно - по мере необходимости, для каждого ДК.
Способ тестирования двигателей коррекции космического аппарата (КА), заключающийся в том, что прикладывают корректирующее воздействие путем включения двигателей коррекции (ДК), проводят ежесуточные траекторные измерения, определяют параметры движения центра масс КА на интервале времени, выбранном по соображениям стабильности систематической составляющей погрешности тяг ДК, набирают статистику по наработкам ДК - фактическим длительностям работы и условным номерам ДК, а также изменениям периода обращения КА, из имеющегося набора данных выбирают те, которые удовлетворяют условию следования одного за другим включений одного и того же ДК, выбранные данные суммируют и рассчитывают средние тяги по каждому работавшему ДК, прикладывают тестовое воздействие к корпусу КА равными импульсами путем последовательных включений двух ДК противоположного направления тяги, отличие от нуля реализованного приращения периода переводят в невязку по суммарному импульсу тяги, которую вносят поровну с противоположным знаком в реализованные импульсы, и получают достоверные уровни тяг работавших ДК.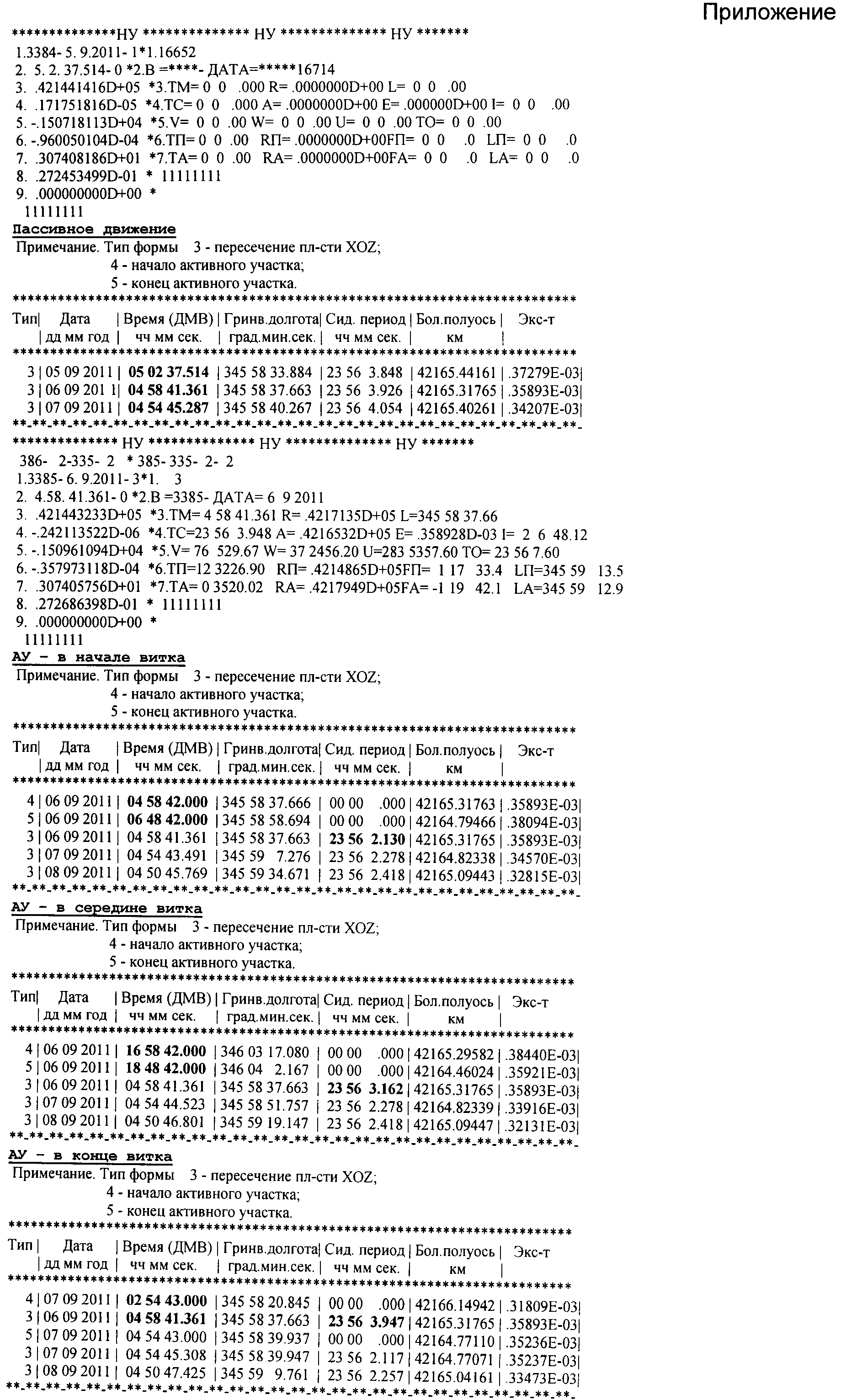
Устройство для нанесения клея на изделие
Электропривод с трехступенчатым планетарным редуктором
Режущий узел мясорубки
Способ регулирования и стабилизации давления в рабочих установках сильфонного типа
Электропривод с трехступенчатым планетарным редуктором
Электропривод с трехступенчатым планетарным редуктором
Электропривод с трехступенчатым планетарным редуктором
Способ работы трехступенчатого планетарного редуктора
Способ работы электропривода с трехступенчатым планетарным редуктором
Способ работы электропривода с планетарным редуктором
Устройство для нанесения клея на изделие
Электропривод с трехступенчатым планетарным редуктором
Режущий узел мясорубки
Способ регулирования и стабилизации давления в рабочих установках сильфонного типа
Электропривод с трехступенчатым планетарным редуктором
Электропривод с трехступенчатым планетарным редуктором
Электропривод с трехступенчатым планетарным редуктором
Способ работы трехступенчатого планетарного редуктора
Способ работы электропривода с трехступенчатым планетарным редуктором
Способ работы электропривода с планетарным редуктором

