Результат интеллектуальной деятельности: ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА ПО ПЕРЕГРУЗКЕ
Вид РИД
Изобретение
Изобретение относится к области авиационной техники, а именно к системам управления самолетом в продольном движении.
Применяемые в настоящее время системы дистанционного управления (СДУ) маневренными самолетами для предотвращения выхода на максимально допустимую перегрузку оснащаются ограничителями предельных режимов (ОПР) полета. Известные ОПР подробно рассмотрены в работе: «Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов / Под ред. Г.С. Бюшгенса. - М.: Российская академия наук («Наука» РАН), 2016. - 704 с., с. 400-407).
Наиболее близким к заявляемому устройству является перегрузочный ОПР, представленный в этой книге на рис. 10.36. Его использование на маневренных самолетах в условиях широкого диапазона изменения высот и скоростей полета связано со следующими недостатками.
1. Трудно обеспечить приемлемые качественные показатели совместной работы СДУ и ОПР, а именно - в достижении приемлемого компромисса между временем выхода на заданную перегрузку и возникающим при этом перерегулировании. Обеспечение потребного быстродействия вызывает на многих режимах полета существенное кратковременное превышение предельных значений перегрузки (перерегулирование) и, наоборот, устранение таких «забросов» с помощью ОПР затягивает время регулирования.
2. У маневренных самолетов при вращении по крену возникает превышение допустимых значений перегрузки. В этом случае необходима дополнительная коррекция предельных значений перегрузки, которая в прототипе отсутствует.
3. Не удовлетворяются требования летчиков о необходимости дополнительного запаса по перемещению ручки управления самолетом (РУС) от максимального значения с целью возможного превышения допустимой перегрузки на определенную величину в критических ситуациях. В прототипе такой возможности при полностью взятой «на себя» РУС (при «перетяге» РУС от максимальной загрузки по усилию) не имеется.
4. Обеспечение требуемых статических и динамических характеристик комплекса СДУ - ОПР в широком диапазоне изменения высотно-скоростных параметров без дополнительных мер затруднительно.
Целью изобретения является выполнение требований по быстродействию и перерегулированию процессов выхода самолета на предельно допустимую перегрузку в широком диапазоне изменения высотно-скоростных параметров полета, обеспечение ограничения допустимых перегрузок при вращении самолета по фену и возможности превышения допустимых перегрузок при «перетяге» РУС.
Ожидаемый технический результат достигается тем, что ОПР содержит последовательно соединенные датчик вертикальных перегрузок nу и первый сумматор, последовательно соединенные датчик угловой скорости (ДУС) тангажа ωz и первый дифференцирующий блок, последовательно соединенные блок задания максимального значения перемещения ручки управления самолетом (РУС) «на себя» и второй сумматор, блок формирования допустимых значений вертикальных перегрузок  , систему воздушных сигналов (СВС), формирующую сигналы статического давления Pст, динамического скоростного напора qдин, числа м и высоты н полета, второй дифференцирующий блок, последовательно соединенные первый инвертор, первый блок выделения максимума из двух сигналов и первый нелинейный блок, интегратор, блок логики, выход которого соединен с управляющим входом интегратора, а вход - с входом рулевого привода самолета, последовательно соединенные первый масштабирующий блок и третий сумматор, выход которого является выходом ОПР, связанным с входом рулевого привода самолета, датчик перемещения РУС (ДПР) по тангажу
, систему воздушных сигналов (СВС), формирующую сигналы статического давления Pст, динамического скоростного напора qдин, числа м и высоты н полета, второй дифференцирующий блок, последовательно соединенные первый инвертор, первый блок выделения максимума из двух сигналов и первый нелинейный блок, интегратор, блок логики, выход которого соединен с управляющим входом интегратора, а вход - с входом рулевого привода самолета, последовательно соединенные первый масштабирующий блок и третий сумматор, выход которого является выходом ОПР, связанным с входом рулевого привода самолета, датчик перемещения РУС (ДПР) по тангажу  , префильтр, блок формирования статических характеристик системы дистанционного управления самолетом, вход которого подключен к выходу ДПР по тангажу
, префильтр, блок формирования статических характеристик системы дистанционного управления самолетом, вход которого подключен к выходу ДПР по тангажу  , а выход - к входу префильтра. Кроме этого ОПР дополнительно содержит ДПР по крену
, а выход - к входу префильтра. Кроме этого ОПР дополнительно содержит ДПР по крену  , последовательно соединенные второй нелинейный блок и первый фильтр подавления помех, выход которого соединен с вторым входом второго сумматора, выход ДПР по тангажу
, последовательно соединенные второй нелинейный блок и первый фильтр подавления помех, выход которого соединен с вторым входом второго сумматора, выход ДПР по тангажу  подключен к входу второго нелинейного блока, четвертый сумматор, последовательно соединенные ДУС крена, третий нелинейный блок и второй блок выделения максимума из двух сигналов, выход которого подключен к первому инвертирующему входу четвертого сумматора, блок ограничения скорости изменения входного сигнала, через который выход блока формирования допустимых значений вертикальных перегрузок
подключен к входу второго нелинейного блока, четвертый сумматор, последовательно соединенные ДУС крена, третий нелинейный блок и второй блок выделения максимума из двух сигналов, выход которого подключен к первому инвертирующему входу четвертого сумматора, блок ограничения скорости изменения входного сигнала, через который выход блока формирования допустимых значений вертикальных перегрузок  соединен с вторым входом четвертого сумматора, четвертый нелинейный блок, вход которого подключен к выходу ДПР по крену
соединен с вторым входом четвертого сумматора, четвертый нелинейный блок, вход которого подключен к выходу ДПР по крену  , а выход - к второму входу второго блока выделения максимума из двух сигналов, блок перемножения, пятый сумматор, первый вход которого через блок перемножения подключен к выходу второго сумматора, второй инвертирующий вход пятого сумматора соединен с выходом четвертого сумматора, а выход пятого сумматора подключен к второму входу первого сумматора, последовательно соединенные второй и третий масштабирующие блоки, через которые выход четвертого сумматора подключен к второму входу блока перемножения, пятый нелинейный блок, шестой сумматор, первый вход которого через пятый нелинейный блок соединен с выходом первого дифференцирующего блока, второй вход шестого сумматора подключен к выходу первого сумматора, последовательно соединенные третий дифференцирующий блок и четвертый масштабирующий блок, пятый масштабирующий блок, вход которого подключен к выходу пятого нелинейного блока, второй инвертор, последовательно соединенные шестой нелинейный блок и шестой масштабирующий блок, седьмой масштабирующий блок, вход которого подключен к выходу шестого сумматора, вход второго дифференцирующего блока соединен с выходом второго инвертора, а выход - с входом шестого нелинейного блока, к входу второго инвертора подключен сигнал
, а выход - к второму входу второго блока выделения максимума из двух сигналов, блок перемножения, пятый сумматор, первый вход которого через блок перемножения подключен к выходу второго сумматора, второй инвертирующий вход пятого сумматора соединен с выходом четвертого сумматора, а выход пятого сумматора подключен к второму входу первого сумматора, последовательно соединенные второй и третий масштабирующие блоки, через которые выход четвертого сумматора подключен к второму входу блока перемножения, пятый нелинейный блок, шестой сумматор, первый вход которого через пятый нелинейный блок соединен с выходом первого дифференцирующего блока, второй вход шестого сумматора подключен к выходу первого сумматора, последовательно соединенные третий дифференцирующий блок и четвертый масштабирующий блок, пятый масштабирующий блок, вход которого подключен к выходу пятого нелинейного блока, второй инвертор, последовательно соединенные шестой нелинейный блок и шестой масштабирующий блок, седьмой масштабирующий блок, вход которого подключен к выходу шестого сумматора, вход второго дифференцирующего блока соединен с выходом второго инвертора, а выход - с входом шестого нелинейного блока, к входу второго инвертора подключен сигнал  с выхода префильтра, седьмой сумматор, первый вход которого подключен к выходу пятого масштабирующего блока, второй вход - к выходу четвертого масштабирующего блока, третий вход - к выходу седьмого масштабирующего блока, четвертый вход - к выходу первого сумматора, пятый вход - к выходу шестого масштабирующего блока, выход седьмого сумматора соединен с вторым входом первого блока выделения максимума из двух сигналов, вход третьего дифференцирующего блока соединен с выходом датчика вертикальных перегрузок, восьмой масштабирующий блок, выход которого соединен с вторым входом интегратора, седьмой нелинейный блок, вход которого подключен к выходу первого нелинейного блока, а выход которого - к входам первого и восьмого масштабирующих блоков, девятый масштабирующий блок, через который выход интегратора соединен с вторым входом третьего сумматора, второй фильтр подавления помех, вход и выход которого соединены соответственно с выходом третьего сумматора и с входом первого инвертора.
с выхода префильтра, седьмой сумматор, первый вход которого подключен к выходу пятого масштабирующего блока, второй вход - к выходу четвертого масштабирующего блока, третий вход - к выходу седьмого масштабирующего блока, четвертый вход - к выходу первого сумматора, пятый вход - к выходу шестого масштабирующего блока, выход седьмого сумматора соединен с вторым входом первого блока выделения максимума из двух сигналов, вход третьего дифференцирующего блока соединен с выходом датчика вертикальных перегрузок, восьмой масштабирующий блок, выход которого соединен с вторым входом интегратора, седьмой нелинейный блок, вход которого подключен к выходу первого нелинейного блока, а выход которого - к входам первого и восьмого масштабирующих блоков, девятый масштабирующий блок, через который выход интегратора соединен с вторым входом третьего сумматора, второй фильтр подавления помех, вход и выход которого соединены соответственно с выходом третьего сумматора и с входом первого инвертора.
Сущность изобретения поясняется чертежами:
на фиг. 1 представлена структурная схема ОПР;
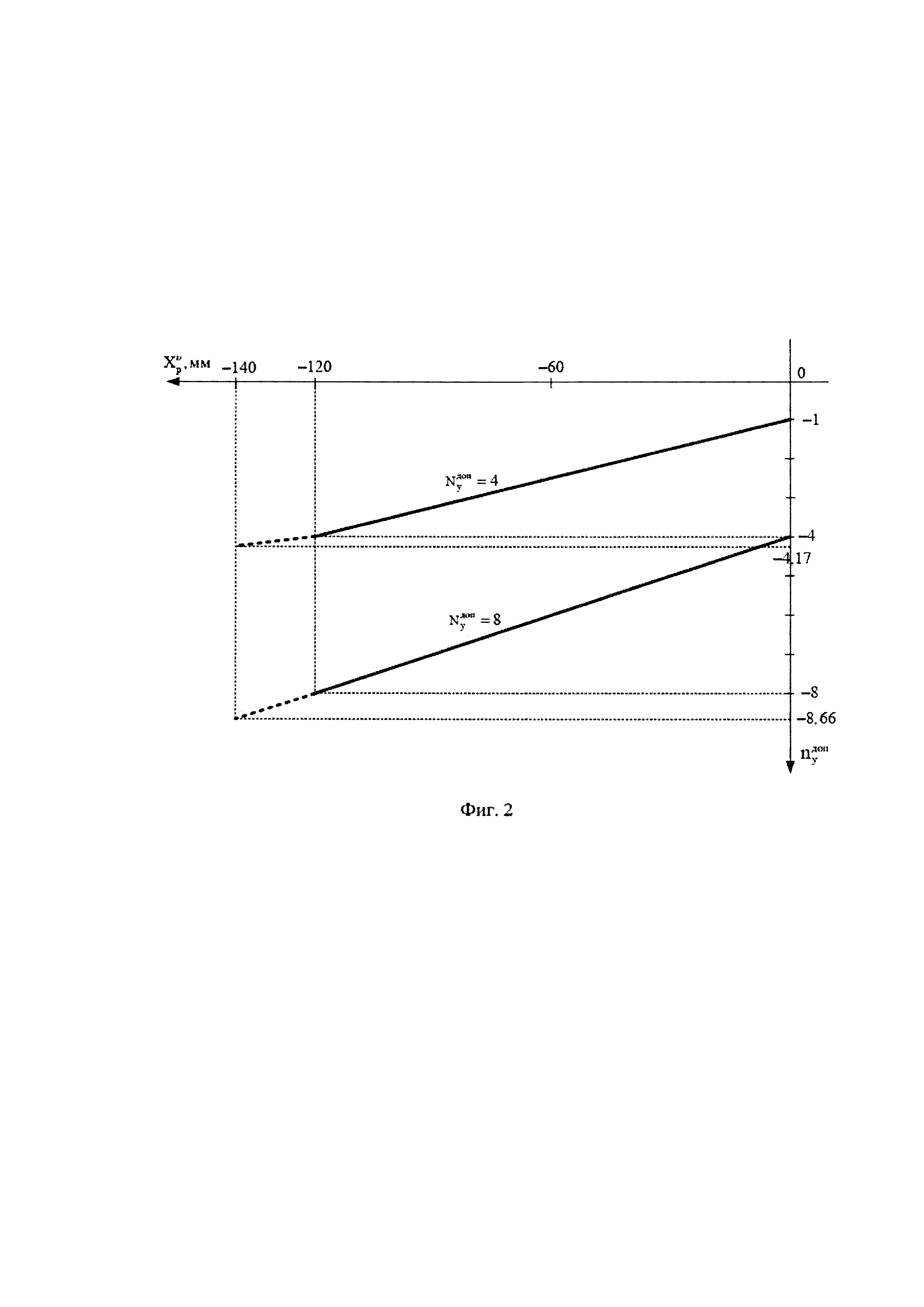
на фиг. 2 показаны статические характеристики ОПР;
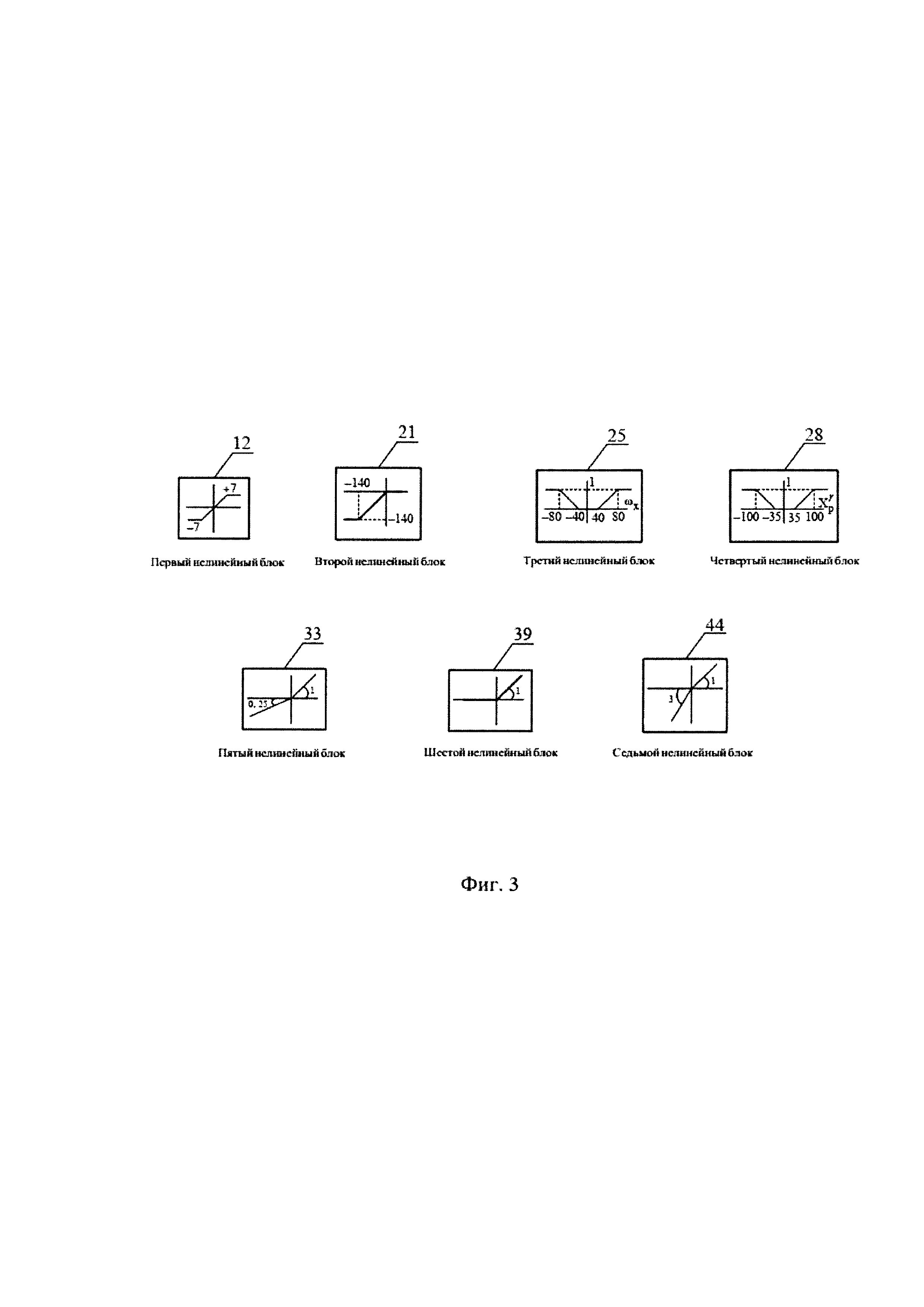
на фиг. 3 показаны варианты исполнения первого, второго, третьего, четвертого, пятого, шестого и седьмого нелинейных блоков;
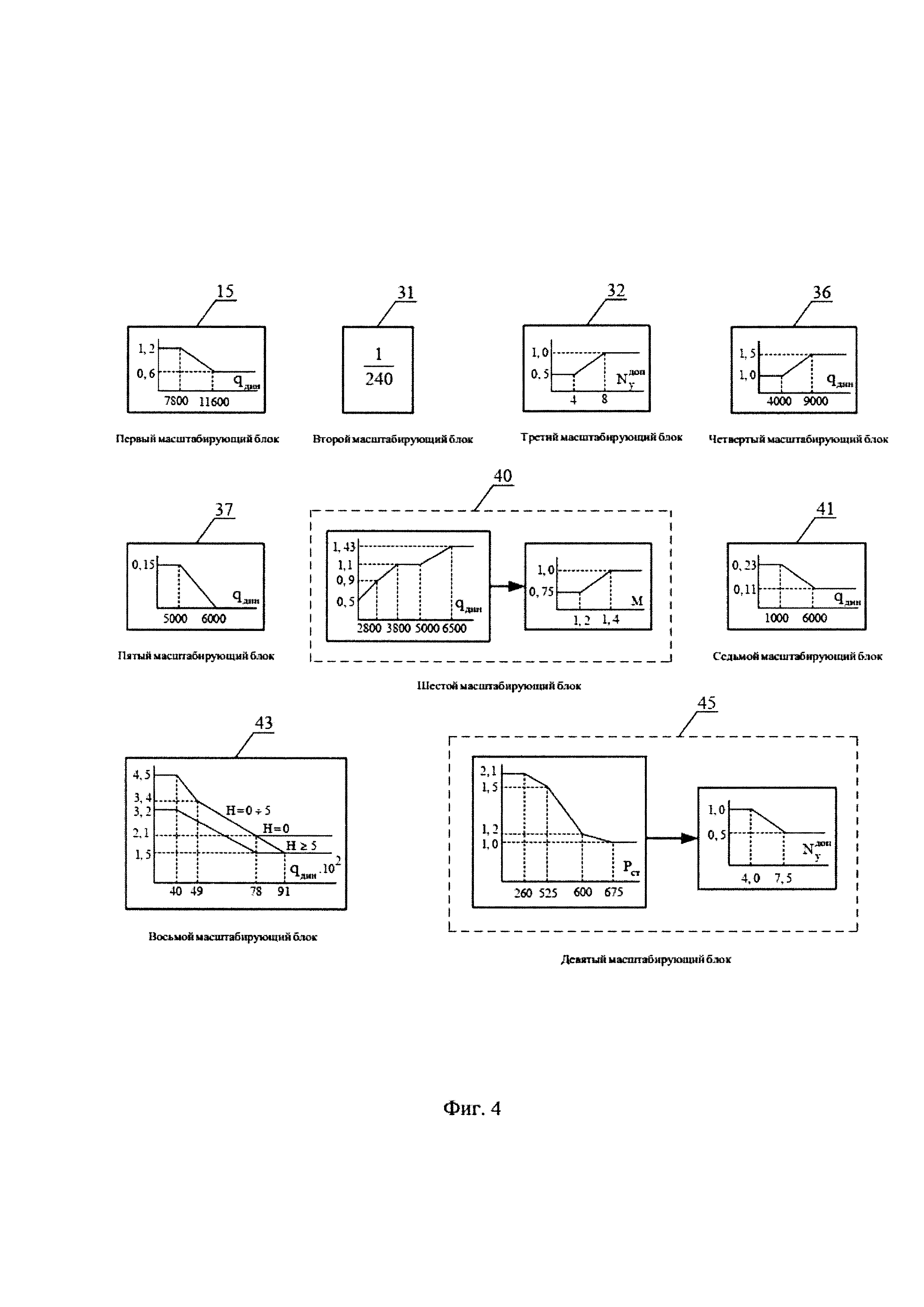
на фиг. 4 показаны варианты исполнения первого, второго, третьего, четвертого, пятого, шестого, седьмого, восьмого и девятого масштабирующих блоков.
На фиг. 1÷4 использованы следующие обозначения:
ωz - угловая скорость тангажа;
ωх - угловая скорость фена;
nу - вертикальная перегрузка;
м - число Маха;
Рст - статическое давление атмосферы;
qдин - динамический скоростной напор;
Н - высота полета;
Uопр - сигнал на выходе ОПР, поступающий на вход рулевого привода;
Uвх рп - сигнал на входе рулевого привода СДУ;
 - перемещение РУС по тангажу;
- перемещение РУС по тангажу;
 - перемещение РУС по крену;
- перемещение РУС по крену;
 - максимальное расчетное значение перемещения РУС по тангажу;
- максимальное расчетное значение перемещения РУС по тангажу;
мах - логический блок выделения максимума из двух сигналов;
 - сигнал на выходе префильтра;
- сигнал на выходе префильтра;
 - заданное значение допустимой перегрузки;
- заданное значение допустимой перегрузки;
 - расчетное значение допустимой перегрузки;
- расчетное значение допустимой перегрузки;
1 - датчик вертикальных перегрузок nу;
2 - первый сумматор;
3 - ДУС тангажа ωz;
4 - первый дифференцирующий блок;
5 - блок задания максимального значения перемещения РУС «на себя»;
6 - второй сумматор;
7 - блок формирования допустимых заданных значений вертикальных перегрузок  ;
;
8 - система воздушных сигналов (СВС);
9 - второй дифференцирующий блок;
10 - первый инвертор;
11 - первый блок выделения максимума из двух сигналов;
12 - первый нелинейный блок;
13 - интегратор;
14 - блок логики;
15 - первый масштабирующий блок;
16 - третий сумматор;
17 - датчик перемещения РУС по тангажу  ;
;
18 - префильтр;
19 - блок формирования статических характеристик системы дистанционного управления самолетом;
20 - датчик перемещения РУС по крену  ;
;
21 - второй нелинейный блок;
22 - первый фильтр подавления помех;
23 - четвертый сумматор;
24 - ДУС крена ωх;
25 - третий нелинейный блок;
26 - второй блок выделения максимума из двух сигналов;
27 - блок ограничения скорости изменения входного сигнала;
28 - четвертый нелинейный блок;
29 - блок перемножения;
30 - пятый сумматор;
31, 32 - соответственно второй и третий масштабирующие блоки;
33 - пятый нелинейный блок;
34 - шестой сумматор;
35 - третий дифференцирующий блок;
36, 37 - соответственно четвертый и пятый масштабирующие блоки;
38 - второй инвертор;
39 - шестой нелинейный блок;
40 - шестой масштабирующий блок;
41 - седьмой масштабирующий блок,
42 - седьмой сумматор;
43 - восьмой масштабирующий блок;
44 - седьмой нелинейный блок;
45 - девятый масштабирующий блок;
46 - второй фильтр подавления помех.
Заявляемый к патентованию ограничитель предельных режимов по перегрузке маневренного самолета содержит последовательно соединенные датчик 1 вертикальных перегрузок nу и первый сумматор 2, последовательно соединенные датчик 3 угловой скорости (ДУС) тангажа ωz и первый дифференцирующий блок 4, последовательно соединенные блок 5 задания максимального значения перемещения ручки управления самолетом (РУС) «на себя» и второй сумматор 6, блок 7 формирования допустимых значений вертикальных перегрузок  , систему воздушных сигналов (СВС), 8 формирующую сигналы статического давления Pст, динамического скоростного напора qдин, числа м и высоты н полета, второй дифференцирующий блок 9, последовательно соединенные первый инвертор 10, первый блок выделения максимума из двух сигналов 11 и первый нелинейный блок 12, интегратор 13, блок логики 14, выход которого соединен с управляющим входом интегратора, а вход - с входом рулевого привода самолета Uвх рп, последовательно соединенные первый масштабирующий блок 15 и третий сумматор 16, выход которого является выходом ОПР, связанным с входом рулевого привода самолета, датчик перемещения РУС (ДПР) по тангажу
, систему воздушных сигналов (СВС), 8 формирующую сигналы статического давления Pст, динамического скоростного напора qдин, числа м и высоты н полета, второй дифференцирующий блок 9, последовательно соединенные первый инвертор 10, первый блок выделения максимума из двух сигналов 11 и первый нелинейный блок 12, интегратор 13, блок логики 14, выход которого соединен с управляющим входом интегратора, а вход - с входом рулевого привода самолета Uвх рп, последовательно соединенные первый масштабирующий блок 15 и третий сумматор 16, выход которого является выходом ОПР, связанным с входом рулевого привода самолета, датчик перемещения РУС (ДПР) по тангажу  17, префильтр 18, блок 19 формирования статических характеристик системы дистанционного управления самолетом, вход которого подключен к выходу ДПР по тангажу
17, префильтр 18, блок 19 формирования статических характеристик системы дистанционного управления самолетом, вход которого подключен к выходу ДПР по тангажу  17, а выход - к входу префильтра 18, отличающийся тем, что дополнительно содержит ДПР по крену
17, а выход - к входу префильтра 18, отличающийся тем, что дополнительно содержит ДПР по крену  20, последовательно соединенные второй нелинейный блок 21 и первый фильтр подавления помех 22, выход которого соединен с вторым входом второго сумматора 6, выход ДПР по тангажу
20, последовательно соединенные второй нелинейный блок 21 и первый фильтр подавления помех 22, выход которого соединен с вторым входом второго сумматора 6, выход ДПР по тангажу  17 подключен к входу второго нелинейного блока 21, четвертый сумматор 23, последовательно соединенные ДУС крена 24, третий нелинейный блок 25 и второй блок выделения максимума из двух сигналов 26, выход которого подключен к первому инвертирующему входу четвертого сумматора 23, блок ограничения скорости изменения входного сигнала 27, через который выход блока формирования допустимых значений вертикальных перегрузок
17 подключен к входу второго нелинейного блока 21, четвертый сумматор 23, последовательно соединенные ДУС крена 24, третий нелинейный блок 25 и второй блок выделения максимума из двух сигналов 26, выход которого подключен к первому инвертирующему входу четвертого сумматора 23, блок ограничения скорости изменения входного сигнала 27, через который выход блока формирования допустимых значений вертикальных перегрузок  7 соединен с вторым входом четвертого сумматора 23, четвертый нелинейный блок 28, вход которого подключен к выходу ДПР по крену
7 соединен с вторым входом четвертого сумматора 23, четвертый нелинейный блок 28, вход которого подключен к выходу ДПР по крену  20, а выход - к второму входу второго блока выделения максимума из двух сигналов 26, блок перемножения 29, пятый сумматор 30, первый вход которого через блок перемножения 29 подключен к выходу второго сумматора 6, второй инвертирующий вход пятого сумматора 30 соединен с выходом четвертого сумматора 23, а выход пятого сумматора 30 подключен к второму входу первого сумматора 2, последовательно соединенные второй 31 и третий 32 масштабирующие блоки, через которые выход четвертого сумматора 23 подключен к второму входу блока перемножения 29, пятый нелинейный блок 33, шестой сумматор 34, первый вход которого через пятый нелинейный блок 33 соединен с выходом первого дифференцирующего блока 4, второй вход шестого сумматора 34 подключен к выходу первого сумматора 2, последовательно соединенные третий дифференцирующий блок 35 и четвертый масштабирующий блок 36, пятый масштабирующий блок 37, вход которого подключен к выходу пятого нелинейного блока 33, второй инвертор 38, последовательно соединенные шестой нелинейный блок 39 и шестой масштабирующий блок 40, седьмой масштабирующий блок 41, вход которого подключен к выходу шестого сумматора 34, вход второго дифференцирующего блока 9 соединен с выходом второго инвертора 38, а выход - с входом шестого нелинейного блока 39, к входу второго инвертора 38 подключен сигнал
20, а выход - к второму входу второго блока выделения максимума из двух сигналов 26, блок перемножения 29, пятый сумматор 30, первый вход которого через блок перемножения 29 подключен к выходу второго сумматора 6, второй инвертирующий вход пятого сумматора 30 соединен с выходом четвертого сумматора 23, а выход пятого сумматора 30 подключен к второму входу первого сумматора 2, последовательно соединенные второй 31 и третий 32 масштабирующие блоки, через которые выход четвертого сумматора 23 подключен к второму входу блока перемножения 29, пятый нелинейный блок 33, шестой сумматор 34, первый вход которого через пятый нелинейный блок 33 соединен с выходом первого дифференцирующего блока 4, второй вход шестого сумматора 34 подключен к выходу первого сумматора 2, последовательно соединенные третий дифференцирующий блок 35 и четвертый масштабирующий блок 36, пятый масштабирующий блок 37, вход которого подключен к выходу пятого нелинейного блока 33, второй инвертор 38, последовательно соединенные шестой нелинейный блок 39 и шестой масштабирующий блок 40, седьмой масштабирующий блок 41, вход которого подключен к выходу шестого сумматора 34, вход второго дифференцирующего блока 9 соединен с выходом второго инвертора 38, а выход - с входом шестого нелинейного блока 39, к входу второго инвертора 38 подключен сигнал  с выхода префильтра 18, седьмой сумматор 42, первый вход которого подключен к выходу пятого масштабирующего блока 37, второй вход - к выходу четвертого масштабирующего блока 36, третий вход - к выходу седьмого масштабирующего блока 41, четвертый вход - к выходу первого сумматора 2, пятый вход - к выходу шестого масштабирующего блока 40, выход седьмого сумматора 42 соединен с вторым входом первого блока выделения максимума из двух сигналов 11, вход третьего дифференцирующего блока 35 соединен с выходом датчика вертикальных перегрузок 1, восьмой масштабирующий блок 43, выход которого соединен с вторым входом интегратора 13, седьмой нелинейный блок 44, вход которого подключен к выходу первого нелинейного блока 12, а выход которого - к входам первого 15 и восьмого 43 масштабирующих блоков, девятый масштабирующий блок 45, через который выход интегратора 13 соединен с вторым входом третьего сумматора 16, второй фильтр подавления помех 46, вход и выход которого соединены соответственно с выходом третьего сумматора 16 и с входом первого инвертора 10.
с выхода префильтра 18, седьмой сумматор 42, первый вход которого подключен к выходу пятого масштабирующего блока 37, второй вход - к выходу четвертого масштабирующего блока 36, третий вход - к выходу седьмого масштабирующего блока 41, четвертый вход - к выходу первого сумматора 2, пятый вход - к выходу шестого масштабирующего блока 40, выход седьмого сумматора 42 соединен с вторым входом первого блока выделения максимума из двух сигналов 11, вход третьего дифференцирующего блока 35 соединен с выходом датчика вертикальных перегрузок 1, восьмой масштабирующий блок 43, выход которого соединен с вторым входом интегратора 13, седьмой нелинейный блок 44, вход которого подключен к выходу первого нелинейного блока 12, а выход которого - к входам первого 15 и восьмого 43 масштабирующих блоков, девятый масштабирующий блок 45, через который выход интегратора 13 соединен с вторым входом третьего сумматора 16, второй фильтр подавления помех 46, вход и выход которого соединены соответственно с выходом третьего сумматора 16 и с входом первого инвертора 10.
Заявляемый к патентованию ограничитель предельных режимов полета маневренного самолета по перегрузке функционирует следующим образом.
В блоке 7 формируются допустимые предварительно заданные значения вертикальных перегрузок  в зависимости от режимов полета (от высоты, скорости полета) и от массово-инерционных характеристик самолета (от запаса топлива, характера полезной нагрузки и пр.). Конкретное значение
в зависимости от режимов полета (от высоты, скорости полета) и от массово-инерционных характеристик самолета (от запаса топлива, характера полезной нагрузки и пр.). Конкретное значение  может меняться во время полета, в том числе скачкообразно. Для парирования резких изменений
может меняться во время полета, в том числе скачкообразно. Для парирования резких изменений  предусмотрен блок 27 ограничения скорости изменения входного сигнала, способствующий установлению нового значения
предусмотрен блок 27 ограничения скорости изменения входного сигнала, способствующий установлению нового значения  в течение ≈ 3 секунд.
в течение ≈ 3 секунд.
Сигнал на выходе сумматора 2 представляет собой сумму сигналов текущего значения вертикальной перегрузки nу и сигнала расчетного значения допустимой перегрузки  . Поскольку этот сигнал
. Поскольку этот сигнал  при работе интегрального блока 13 ОПР обнуляется, а текущие перегрузки nу положительны, сигнал
при работе интегрального блока 13 ОПР обнуляется, а текущие перегрузки nу положительны, сигнал  находится в области отрицательных значений.
находится в области отрицательных значений.
Сигнал перемещения РУС, формируемый на выходе ДПР 17, ограничивается в нелинейном блоке 21 в положении «на себя»  на предельную величину
на предельную величину  , принятую в конкретно рассматриваемом случае равной
, принятую в конкретно рассматриваемом случае равной  и очищается от помех с помощью фильтра 22. Сигнал
и очищается от помех с помощью фильтра 22. Сигнал  соответствует ситуации «перетяга» РУС через максимальную загрузку по усилию. Временно полагая сигнал на выходе блока 26 выделения максимума из двух сигналов равным нулю, на выходе сумматора 30 получим сигнал
соответствует ситуации «перетяга» РУС через максимальную загрузку по усилию. Временно полагая сигнал на выходе блока 26 выделения максимума из двух сигналов равным нулю, на выходе сумматора 30 получим сигнал  расчетного значения допустимой перегрузки, равный
расчетного значения допустимой перегрузки, равный

где  - предварительно назначенное максимальное значение перемещения РУС, выбираемое из условия
- предварительно назначенное максимальное значение перемещения РУС, выбираемое из условия  /в рассматриваемом далее случае
/в рассматриваемом далее случае  /;
/;
 - коэффициент передачи второго масштабирующего блока 31;
- коэффициент передачи второго масштабирующего блока 31;
k3 - переменный коэффициент передачи третьего масштабирующего блока 32, изменяемый в зависимости от текущего значения  /в рассматриваемом случае так, как показано на фиг.4/.
/в рассматриваемом случае так, как показано на фиг.4/.
С учетом принятого значения коэффициента передачи k2 зависимость (1) расчетного значения допустимой перегрузки  от перемещения РУС
от перемещения РУС  имеет вид
имеет вид

На фиг. 2 представлены графики изменения  для случая, когда
для случая, когда  ,
,  при двух значениях коэффициента передачи третьего масштабирующего блока 32 (1 и 0,5), соответствующих двум заданным значениям допустимой перегрузки
при двух значениях коэффициента передачи третьего масштабирующего блока 32 (1 и 0,5), соответствующих двум заданным значениям допустимой перегрузки  (фиг. 2). Из графиков изменения
(фиг. 2). Из графиков изменения  следует, что:
следует, что:
- при максимальном перемещении РУС «на себя» ( ) в обоих случаях обеспечивается расчетное значение допустимой перегрузки
) в обоих случаях обеспечивается расчетное значение допустимой перегрузки  (8 и 4 единицы соответственно);
(8 и 4 единицы соответственно);
- при предельном перемещении РУС на себя (при «перетяге» загрузки РУС, когда  ) летчику дается возможность дополнительного увеличения предельной перегрузки: при
) летчику дается возможность дополнительного увеличения предельной перегрузки: при  на 8,33% и при
на 8,33% и при  на 4,16%;
на 4,16%;
- при изменении заданного значения допустимой перегрузки с  на
на  обеспечивается увеличение градиента перемещения РУС по перегрузке
обеспечивается увеличение градиента перемещения РУС по перегрузке  с величины
с величины  до значения
до значения  . За счет этого облегчается пилотирование самолета летчиком при пониженных перегрузках.
. За счет этого облегчается пилотирование самолета летчиком при пониженных перегрузках.
Заданное значение допустимой перегрузки  корректируется при крене самолета в зависимости от угловой скорости крена ωх и текущего перемещения РУС по крену
корректируется при крене самолета в зависимости от угловой скорости крена ωх и текущего перемещения РУС по крену  . С этой целью в нелинейном блоке 25 формируется сигнал поправки величины
. С этой целью в нелинейном блоке 25 формируется сигнал поправки величины  по угловой скорости крена ωх, а в нелинейном блоке 27 - сигнал поправки от текущего положения РУС по крену
по угловой скорости крена ωх, а в нелинейном блоке 27 - сигнал поправки от текущего положения РУС по крену  . В блоке 26 выделяется максимальный из двух этих сигналов, поступающий затем на инвертирующий вход сумматора 23 и понижающий заданное значение допустимой перегрузки
. В блоке 26 выделяется максимальный из двух этих сигналов, поступающий затем на инвертирующий вход сумматора 23 и понижающий заданное значение допустимой перегрузки  . Пример реализации нелинейных блоков 25 и 28 приведен на фиг. 3. Коррекция допустимой перегрузки
. Пример реализации нелинейных блоков 25 и 28 приведен на фиг. 3. Коррекция допустимой перегрузки  при крене самолета способствует снижению перерегулирования при отработке перегрузки при работающем ОПР.
при крене самолета способствует снижению перерегулирования при отработке перегрузки при работающем ОПР.
Для коррекции динамических характеристик ОПР по режимам полета используются сигналы скорости изменения угловой скорости тангажа  , вертикальной перегрузки
, вертикальной перегрузки  и сигнала
и сигнала  с выхода префильтра 18. С этой целью:
с выхода префильтра 18. С этой целью:
- сигнал ωz с выхода ДУС тангажа 3 поступает на первый вход сумматора 42 по цепи: дифференцирующий блок 4→нелинейный блок 33→масштабирующий блок 37, а также на третий вход сумматора 42 по цепи: дифференцирующий блок 4→нелинейный блок 33→первый вход сумматора 34→масштабирующий блок 41; с помощью нелинейного блока 33 осуществляется изменение коэффициента передачи положительных и отрицательных значений сигнала  при движении РУС «на себя» и «от себя»;
при движении РУС «на себя» и «от себя»;
- сигнал nу с выхода датчика вертикальных перегрузок 1 поступает на второй вход сумматора 42 через дифференцирующий блок 35 и масштабирующий блок 36;
- сигнал  с выхода префильтра 18 поступает на пятый вход сумматора 42 по цепи: инвертор 38→дифференцирующий блок 9→нелинейный блок 39→масштабирующий блок 40. Инвертор 38 и нелинейный блок 39 пропускают положительный сигнал производной
с выхода префильтра 18 поступает на пятый вход сумматора 42 по цепи: инвертор 38→дифференцирующий блок 9→нелинейный блок 39→масштабирующий блок 40. Инвертор 38 и нелинейный блок 39 пропускают положительный сигнал производной  при движении РУС «на себя» и блокируют прохождение отрицательного сигнала.
при движении РУС «на себя» и блокируют прохождение отрицательного сигнала.
Дифференцирующие блоки 4, 9 и 35 реализуются в соответствии с передаточной функцией  (Т - постоянная времени, р - оператор дифференцирования).
(Т - постоянная времени, р - оператор дифференцирования).
Варианты исполнения нелинейных блоков 33, 39 и масштабирующих блоков 36, 37, 40, 41 представлены соответственно на фиг. 3 и фиг. 4.
Блок 11 схемы МАХ предназначен для управления работой интегратора 13. При взятии РУС «на себя» и срабатывании ОПР на второй вход интегратора 13 поступает сигнал с выхода сумматора 42 через второй вход схемы МАХ, нелинейные блоки 12, 44 и масштабирующий блок 43. Возникающий при этом на выходе интегратора 13 сигнал через масштабирующий блок 45 формирует на выходе сумматора 16 сигнал Uопp, отклоняющий с помощью рулевого привода руль высоты самолета в направлении уменьшения перегрузки nу до момента достижения предельно допустимого расчетного значения  . В случае последующего перемещения летчиком РУС «от себя» блоком 11 схемы МАХ на вход нелинейного блока 12 подключается сигнал с выхода инвертора 10. В этой ситуации интегратор 13 охватывается отрицательной обратной связью по цепи: выход сумматора 16→фильтр подавления помех 46→инвертор 10→первый вход схемы МАХ→нелинейный блок 12→масштабирующий блок 43→второй вход интегратора 13. Благодаря этому сформированный ранее на выходе сумматора 16 сигнал Uопр уменьшается до нуля за время ≈3 секунды. Блок логики 14 предназначен для ограничения предельных значений выходного сигнала интегратора с целью последующего ограничения предельных отклонений руля высоты от действия ОПР. С помощью этого блока интегратор 13 включается в работу по сигналу на втором входе при условии Uвx min≤Uвx рп≤Uвx max, т.е. когда сигнал на входе рулевого привода находится в рамках допустимых границ изменения. При нарушении этого условия процесс интегрирования блокируется. Нелинейный блок 12 предназначен для ограничения скоростной характеристики интегратора 13, нелинейный блок 44 - для коррекции скоростной характеристики интегратора 13 в зависимости от знака сигнала на втором его входе. С помощью масштабирующих блоков 15, 43, 45 обеспечиваются приемлемые динамические характеристики интегральной части ОПР. Фильтр 46, представляющий собой апериодическое звено, предназначен для фильтрации помех в выходном сигнале сумматора 16.
. В случае последующего перемещения летчиком РУС «от себя» блоком 11 схемы МАХ на вход нелинейного блока 12 подключается сигнал с выхода инвертора 10. В этой ситуации интегратор 13 охватывается отрицательной обратной связью по цепи: выход сумматора 16→фильтр подавления помех 46→инвертор 10→первый вход схемы МАХ→нелинейный блок 12→масштабирующий блок 43→второй вход интегратора 13. Благодаря этому сформированный ранее на выходе сумматора 16 сигнал Uопр уменьшается до нуля за время ≈3 секунды. Блок логики 14 предназначен для ограничения предельных значений выходного сигнала интегратора с целью последующего ограничения предельных отклонений руля высоты от действия ОПР. С помощью этого блока интегратор 13 включается в работу по сигналу на втором входе при условии Uвx min≤Uвx рп≤Uвx max, т.е. когда сигнал на входе рулевого привода находится в рамках допустимых границ изменения. При нарушении этого условия процесс интегрирования блокируется. Нелинейный блок 12 предназначен для ограничения скоростной характеристики интегратора 13, нелинейный блок 44 - для коррекции скоростной характеристики интегратора 13 в зависимости от знака сигнала на втором его входе. С помощью масштабирующих блоков 15, 43, 45 обеспечиваются приемлемые динамические характеристики интегральной части ОПР. Фильтр 46, представляющий собой апериодическое звено, предназначен для фильтрации помех в выходном сигнале сумматора 16.
Блок 19 является составной частью системы дистанционного управления конкретного самолета и предназначен для формирования ее статических характеристик.
Заявляемый к патентованию ОПР по перегрузке по сравнению с прототипом обеспечивает:
- требуемые статические и динамические характеристики комплекса СДУ - ОПР в широком диапазоне изменения высотно-скоростных параметров (за счет использования предложенного комплекса нелинейных и масштабирующих блоков и связей между ними);
- ограничение допустимых значений вертикальной перегрузки при одновременном движении самолета по крену (за счет применения нелинейных блоков 25, 28; блока 26 выделения максимума из двух сигналов, ДУС крена 24, датчика 20 положения РУС по фену и связей между ними);
- выполнение требований летчиков о необходимости резервного запаса по перемещению РУС от максимального значения (при «перетяге» РУС) с целью возможного превышения допустимой перегрузки на определенную величину в критических ситуациях /за счет правильного выбора максимального значения перемещения РУС «на себя» в блоке 5 (120 мм) и величины ограничения сигналов в нелинейном блоке 21 (- 140 мм)/.
Ограничитель предельных режимов полета (ОПР) по перегрузке маневренного самолета, содержащий последовательно соединенные датчик вертикальных перегрузок n и первый сумматор, последовательно соединенные датчик угловой скорости (ДУС) тангажа ω и первый дифференцирующий блок, последовательно соединенные блок задания максимального значения перемещения ручки управления самолетом (РУС) «на себя» и второй сумматор, блок формирования допустимых значений вертикальных перегрузок , систему воздушных сигналов (СВС), формирующую сигналы статического давления P, динамического скоростного напора q, числа м и высоты н полета, второй дифференцирующий блок, последовательно соединенные первый инвертор, первый блок выделения максимума из двух сигналов и первый нелинейный блок, интегратор, блок логики, выход которого соединен с управляющим входом интегратора, а вход - с входом рулевого привода самолета, последовательно соединенные первый масштабирующий блок и третий сумматор, выход которого является выходом ОПР, связанным с входом рулевого привода самолета, датчик перемещения РУС (ДПР) по тангажу , префильтр, блок формирования статических характеристик системы дистанционного управления самолетом, вход которого подключен к выходу ДПР по тангажу , а выход - к входу префильтра, отличающийся тем, что дополнительно содержит ДПР по крену , последовательно соединенные второй нелинейный блок и первый фильтр подавления помех, выход которого соединен с вторым входом второго сумматора, выход ДПР по тангажу подключен к входу второго нелинейного блока, четвертый сумматор, последовательно соединенные ДУС крена, третий нелинейный блок и второй блок выделения максимума из двух сигналов, выход которого подключен к первому инвертирующему входу четвертого сумматора, блок ограничения скорости изменения входного сигнала, через который выход блока формирования допустимых значений вертикальных перегрузок соединен с вторым входом четвертого сумматора, четвертый нелинейный блок, вход которого подключен к выходу ДПР по крену , а выход - к второму входу второго блока выделения максимума из двух сигналов, блок перемножения, пятый сумматор, первый вход которого через блок перемножения подключен к выходу второго сумматора, второй инвертирующий вход пятого сумматора соединен с выходом четвертого сумматора, а выход пятого сумматора подключен к второму входу первого сумматора, последовательно соединенные второй и третий масштабирующие блоки, через которые выход четвертого сумматора подключен к второму входу блока перемножения, пятый нелинейный блок, шестой сумматор, первый вход которого через пятый нелинейный блок соединен с выходом первого дифференцирующего блока, второй вход шестого сумматора подключен к выходу первого сумматора, последовательно соединенные третий дифференцирующий блок и четвертый масштабирующий блок, пятый масштабирующий блок, вход которого подключен к выходу пятого нелинейного блока, второй инвертор, последовательно соединенные шестой нелинейный блок и шестой масштабирующий блок, седьмой масштабирующий блок, вход которого подключен к выходу шестого сумматора, вход второго дифференцирующего блока соединен с выходом второго инвертора, а выход - с входом шестого нелинейного блока, к входу второго инвертора подключен сигнал с выхода префильтра, седьмой сумматор, первый вход которого подключен к выходу пятого масштабирующего блока, второй вход - к выходу четвертого масштабирующего блока, третий вход - к выходу седьмого масштабирующего блока, четвертый вход - к выходу первого сумматора, пятый вход - к выходу шестого масштабирующего блока, выход седьмого сумматора соединен с вторым входом первого блока выделения максимума из двух сигналов, вход третьего дифференцирующего блока соединен с выходом датчика вертикальных перегрузок, восьмой масштабирующий блок, выход которого соединен с вторым входом интегратора, седьмой нелинейный блок, вход которого подключен к выходу первого нелинейного блока, а выход которого - к входам первого и восьмого масштабирующих блоков, девятый масштабирующий блок, через который выход интегратора соединен с вторым входом третьего сумматора, второй фильтр подавления помех, вход и выход которого соединены соответственно с выходом третьего сумматора и с входом первого инвертора.










Система объективного контроля
Система автоматического управления самолетом при снижении
Способ корректировки облика летательного аппарата по величине радиолокационной заметности
Универсальный имитатор авиационных средств поражения и способ проверки работы бортовых систем авиационного вооружения с помощью универсального имитатора авиационных средств поражения
Электромагнитный клапан
Струйный датчик уровня
Система автоматического управления самолетом при наборе и стабилизации заданной высоты полета
Клапан обратный
Сливной кран
Система автоматического управления боковым движением самолета при заходе на посадку
Способ определения расходования ресурса и спектра нагрузок основных элементов планера маневренных самолетов
Способ определения чувствительности опухоли легкого к терапии ингибиторами тирозинкиназ
Способ вертебропластики
Устройство обнаружения факта наведения самонаводящегося по радиоизлучению оружия на радиоэлектронное средство, защищенное отвлекающим устройством
Комплексная система управления траекторией летательного аппарата при заходе на посадку
Электромеханический мини-привод поступательного действия
Модульный молекулярный конъюгат для направленной доставки генетических конструкций и способ его получения
Система автоматического управления самолетом при заходе на посадку
Молекулярные конъюгаты с поликатионным участком и лигандом для доставки в клетку и ядро клетки днк и рнк
Способ вертебропластики

