Результат интеллектуальной деятельности: СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ
Вид РИД
Изобретение
Изобретение относится к области авиационной техники, а именно к системе автоматического управления самолетом при заходе на посадку в продольной плоскости по заданной траектории (глиссаде) снижения, задаваемой радиотехническими или иными средствами посадки.
Известна система автоматического управления (САУ) самолетом при заходе на посадку, использующая в качестве координаты управления сигнал угла тангажа (Михалев И.А., Окоемов Б.Н., Чикулаев М.С. Системы автоматической посадки. М.: Машиностроение, 1975, с.81., рис.2.21). Однако данной системе с углом тангажа в качестве координаты управления свойственны невысокие характеристики ветроустойчивости (Михалев И.А., Окоемов Б.Н., Чикулаев М.С. Системы автоматической посадки. М.: Машиностроение, 1975, с.99).
Более высокими характеристиками ветроустойчивости обладает система автоматического управления самолетом при заходе на посадку, в которой в качестве координаты управления используется сигнал вертикальной перегрузки (Михалев И.А., Окоемов Б.Н., Чикулаев М.С. Системы автоматической посадки. М.: Машиностроение, 1975, с.83, рис.2.23а). Но практика эксплуатации самолетов, оснащенных такой системой, выявила ее недостаточную помехозащищенность. Сигнал углового отклонения самолета от глиссады снижения, формируемый существующими посадочными радиотехническими системами (РТС), содержит в себе аддитивную помеху с частотой ≈1 Гц и с амплитудой, доходящей до 10% от максимального уровня полезного сигнала (так называемую «герцовку»). Принципиальная необходимость дифференцирования сигнала отклонения самолета от глиссады снижения в рассматриваемой системе управления приводит к увеличению уровня помех в сигнале заданной перегрузки, требует дополнительных мер по их фильтрации фильтрами с большими постоянными времени, что приводит к ухудшению динамических характеристик процессов управления.
Наиболее близкой к заявляемой системе (прототипом) является система автоматической посадки летательных аппаратов (Кабачинский В.В., Калинин Ю.И., Минеев М.И., патент RU 2 284 058 С2, МПК G08G 5/02, B64D 45/04, 2006 г.), содержащая посадочную РТС, включающую в себя наземный глиссадный радиомаяк (ГРМ), связанные с ним через радиоканал бортовой глиссадный радиоприемник (ГРП) и дальномер, блок умножения, первый вход которого соединен с выходом ГРП, вычислитель комплексной системы управления (КСУ) и связанные с ним датчики вертикальной перегрузки, угловой скорости тангажа, угла атаки, рулевой привод, вход которого соединен с выходом КСУ, а выход - с поверхностями управления самолетом по тангажу (в продольной плоскости), первый и второй интеграторы, первый и второй сумматоры, сглаживающий фильтр. Кроме того, она содержит в бортовой части самолета бортовую аппаратуру потребителей, состоящую из спутниковой навигационной системы (СНС), скомплексированной с инерциальной навигационной системой (ИС), блок формирования траекторных параметров, предназначенный для фильтрации и интегрирования вертикальной скорости полета самолета, поступающей на него с бортовой аппаратуры потребителей, подключенный к приемнику СНС индикатор летчика, радиовысотомер, компаратор, блок фильтрации линейных траекторных параметров СНС со вторым сглаживающим фильтром, блок фильтрации угловых отклонений от равносигнальных зон посадочной РТС, выполненный на сумматоре и интеграторе, схему НЕ, последовательно соединенную с компаратором, два входа которого соединены с задатчиком высоты 60-70 м и радиовысотомером, при этом выход блока формирования траекторных параметров по отклонению от глиссады соединен с входом первого сумматора блока фильтрации, третий выход бортовой аппаратуры потребителей по дальности Dгрм до радиомаяка ГРМ соединен через блок умножения с первым входом интегратора блока фильтрации, второй вход блока умножения через схему НЕ подключен к выходу ГРП, второй выход которого подключен к первому входу второго сумматора блока фильтрации, соединенного со вторым входом интегратора, подключенного ко второму входу первого сумматора, выход которого подключен к второму входу второго сумматора, выделенные блоком фильтрации траекторные параметры используют для формирования управляющих сигналов посадки самолета.
В указанной системе автоматической посадки самолета по патенту RU 2284058 используется перегрузочный закон управления вида

где Δnузад - заданное значение избыточной вертикальной перегрузки, формируемое в САУ и отрабатываемое затем самолетом,
 - Функция от дальности,
- Функция от дальности,
iεг, µεг - передаточные числа,
Т1, - постоянная времени закона управления САУ,
ΔН - линейное отклонение самолета от глиссады снижения,
p - символ дифференцирования сигнала,
откуда, с учетом того что  , где εг - угловое отклонение самолета от глиссады снижения, получается следующее выражение для Δnузад
, где εг - угловое отклонение самолета от глиссады снижения, получается следующее выражение для Δnузад

где  - производная сигнала углового отклонения самолета от глиссады снижения по времени (t).
- производная сигнала углового отклонения самолета от глиссады снижения по времени (t).
Принцип работы системы-прототипа состоит в следующем.
На первом этапе (захват глиссады и стабилизация положения самолета на глиссаде) в САУ работает алгоритм (2) формирования сигнала Δnузад по угловому отклонению самолета от глиссады. При этом:
- специально предусмотренным устройством в системе автоматической посадки постепенно уменьшается коэффициент усиления по мере приближения самолета к ГРМ, к земле;
- в СНС происходит коррекция параметров по сигналам посадочной РТС.
На втором этапе работы (на высоте 60-70 метров) коррекция в СНС прекращается, система автоматической посадки переходит на управление только по сигналам СНС.
Система автоматической посадки самолета по патенту RU 2284058 отличается ограниченной помехозащищенностью и точностью, поскольку на первом этапе в ней используется сигнал РТС, включающий в себя помеху типа «герцовки». Дифференцирование этого сигнала вызывает значительный уровень помех в сигнале заданной перегрузки. Для подавления помех требуется фильтр с большой постоянной времени Т1 (а на практике - несколько таких последовательно соединенных фильтров), что приводит к ухудшению динамических характеристик процессов управления и в конечном счете к снижению точности стабилизации самолета на глиссаде снижения. Другим недостатком данной системы является ограниченная функциональная надежность. В случае выхода из строя группировки искусственных спутников Земли (ИСЗ) - например, в результате их уничтожения противником - работа системы автоматической посадки самолета нарушается вплоть до потери управления на малых высотах, когда управление осуществляется только по сигналам СНС.
Техническим результатом заявляемого изобретения является повышение помехозащищенности, точности и надежности системы автоматического управления самолетом при заходе на посадку.
Технический результат достигается тем, что система автоматического управления самолетом при заходе на посадку содержит посадочную РТС, включающую в себя связанные через радиоканал наземный глиссадный радиомаяк ГРМ, бортовой глиссадный радиоприемник ГРП и дальномер, блок умножения, первый вход которого соединен с выходом ГРП, вычислитель комплексной системы управления КСУ и связанные с ним датчики вертикальной перегрузки, угловой скорости тангажа и угла атаки, рулевой привод, вход которого соединен с выходом вычислителя КСУ, а выход соединен с поверхностями управления самолетом в продольной плоскости, первый и второй интеграторы, первый и второй сумматоры, фильтр. Кроме того, система дополнительно содержит второй, третий и четвертый фильтры, шесть сумматоров, шесть нелинейных блоков, датчик вмешательства летчика в управление самолетом, датчик угла крена, инвертор, двухпозиционный ключ, три блока статических коэффициентов передачи сигналов, датчик вертикальной скорости полета самолета, при этом выход датчика вертикальной скорости полета самолета соединен с первым входом первого сумматора, второй вход которого подключен к выходу первого фильтра, а выход подключен к входу первого интегратора, связанного своим выходом с первыми входами второго и третьего сумматоров, выход дальномера через второй фильтр и первый нелинейный блок подключен к второму входу блока умножения, выход которого связан со вторым входом второго сумматора, подключенного своим выходом через первый и третий фильтры со вторым входом третьего сумматора и с первым входом четвертого сумматора, второй вход которого соединен с выходом датчика вертикальной скорости полета самолета, выходы третьего и четвертого сумматоров соответственно через первый и второй блоки статических коэффициентов передачи сигналов соединены с первым и вторым входами пятого сумматора, выход которого соединен с первым входом шестого сумматора и через последовательно соединенные четвертый фильтр, первый нормально-замкнутый контакт двухпозиционного ключа и второй интегратор соединен с первым входом седьмого сумматора, второй вход которого подключен к выходу датчика вертикальной скорости полета самолета, а выход подключен к входам инвертора и третьего блока статического коэффициента передачи сигналов, соединенного своим выходом со вторым входом шестого сумматора, выход второго фильтра через второй нелинейный блок подключен к входу третьего нелинейного блока, второй вход которого соединен с выходом шестого сумматора, второй нормально-разомкнутый контакт двухпозиционного ключа соединен с выходом инвертора, а третий управляющий вход двухпозиционного ключа соединен с выходом датчика вмешательства летчика в управление самолетом, датчик угла крена через четвертый нелинейный блок соединен с первым входом восьмого сумматора, второй и третий входы которого подключены соответственно к выходам третьего и пятого нелинейных блоков, вход пятого нелинейного блока соединен с выходом датчика вертикальной скорости полета самолета, выход восьмого сумматора через шестой нелинейный блок подключен к входу вычислителя комплексной системы управления.
Включение в систему автоматического управления самолетом дополнительно трех фильтров и шести сумматоров, а также шести нелинейных блоков, датчика вмешательства летчика в управление самолетом, датчика угла крена, инвертора, двухпозиционного ключа, трех блоков статических коэффициентов передачи сигналов и датчика вертикальной скорости полета самолета, скомпонованных соответствующим образом, позволяет говорить о следующих преимуществах заявляемого изобретения:
- формирование сигнала Δnузад осуществляется по сигналам линейного отклонения ΔН и скорости линейного отклонения самолета от глиссады снижения  , получаемой без дифференцирования сигнала ΔН на основе комплексной обработки сигналов углового отклонения самолета от глиссады снижения εг, вертикальной скорости полета Vy и удаления Dгрм самолета от ГРМ, при этом за счет предложенной схемы комплексной обработки сигналов повышается помехозащищенность и динамическая точность работы системы;
, получаемой без дифференцирования сигнала ΔН на основе комплексной обработки сигналов углового отклонения самолета от глиссады снижения εг, вертикальной скорости полета Vy и удаления Dгрм самолета от ГРМ, при этом за счет предложенной схемы комплексной обработки сигналов повышается помехозащищенность и динамическая точность работы системы;
- система управления самолетом при автоматическом заходе на посадку работает только по сигналам наземной посадочной РТС и не использует сигналы СНС, что повышает ее функциональную надежность в случае вывода из строя группировки ИСЗ;
- в сигнале Δnузад присутствует составляющая, которая пропорциональна большим отклонениям текущего значения вертикальной скорости полета самолета Vy от значений 0>Vy>-10 м/с, за счет этого не могут возникать большие значения вертикальной скорости полета самолета и тем самым повышается надежность системы в нештатных ситуациях (например, при сильных порывах ветра, при вмешательствах летчика в процесс управления);
- система является астатической, т.к. в сигнал Δnузад включена интегральная составляющая вида  ,
,
где  - оценка вертикальной скорости полета самолета,
- оценка вертикальной скорости полета самолета,
i, µ, - передаточные числа,
Т - постоянная времени фильтра,
при этом использование астатического закона управления позволяет повысить точность стабилизации самолета на глиссаде снижения;
- командный сигнал Δnузад ограничивается по величине, а именно при приближении к ГРМ допустимые значения Δnузад уменьшаются, тем самым снижаются возможные большие отклонения самолета от глиссады снижения, особо опасные на малых высотах, т.е. повышается безопасность автоматического управления и надежность системы управления;
- в сигнал Δnузад дополнительно введена компенсационная составляющая  , обеспечивающая компенсацию потери высоты самолета при крене самолета, за счет этого уменьшается отклонение самолета от глиссады снижения, вызванное углом крена γ, т.е. повышается точность работы заявленной системы.
, обеспечивающая компенсацию потери высоты самолета при крене самолета, за счет этого уменьшается отклонение самолета от глиссады снижения, вызванное углом крена γ, т.е. повышается точность работы заявленной системы.
Сущность изобретения поясняется следующими фигурами:
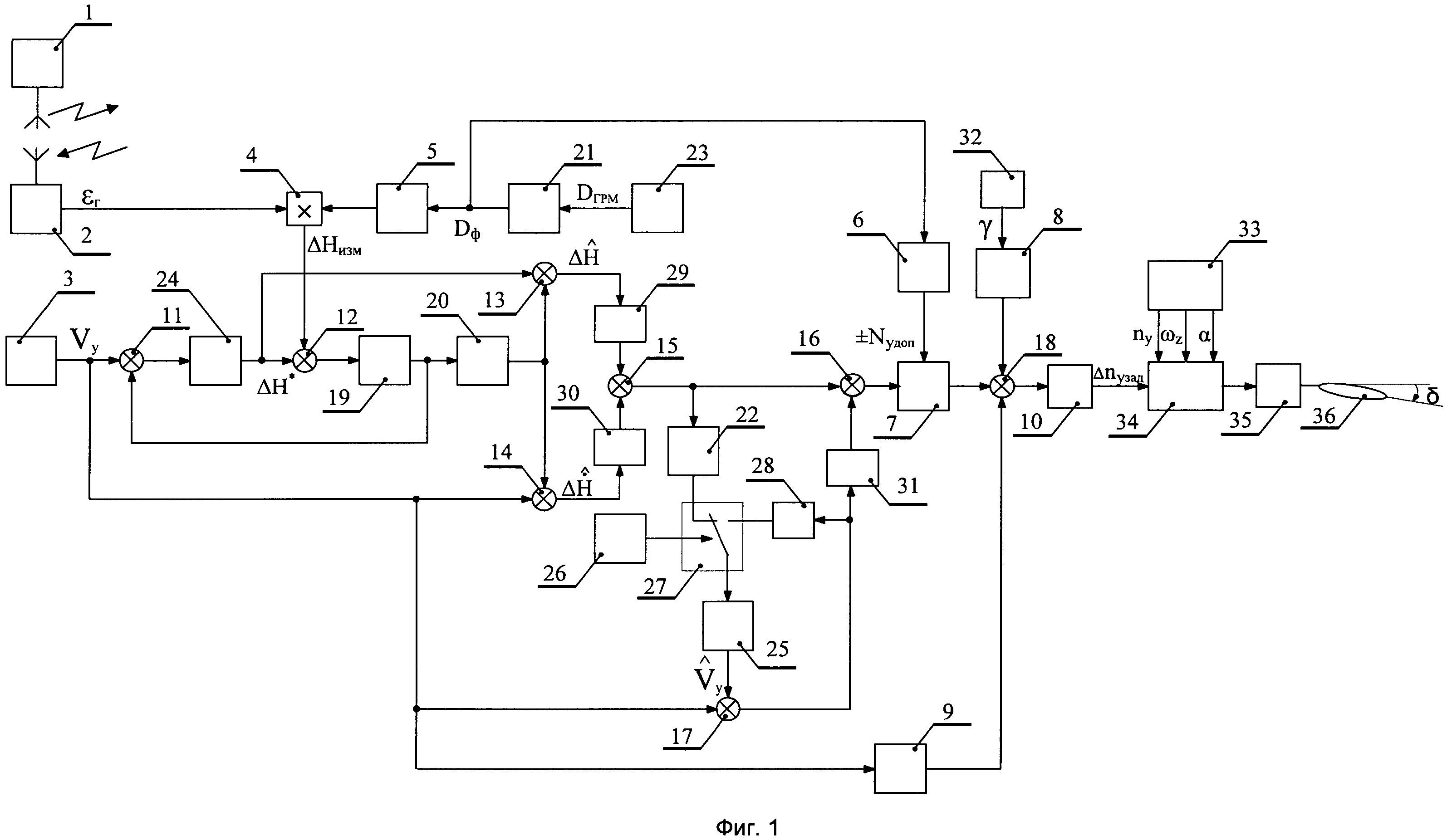
на фиг.1 изображена система автоматического управления самолетом при заходе на посадку;
на фиг.2, 3, 4 и 5 представлены характеристики нелинейных блоков 5, 6, 7, 9, 10.
На фиг.1-5 использованы следующие обозначения:
1 - глиссадный радиомаяк ГРМ посадочной РТС
2 - бортовой глиссадный радиоприемник ГРП
3 - датчик вертикальной скорости Vy полета самолета
4 - блок умножения
5, 6, 7, 8, 9, 10 - нелинейные блоки
11, 12, 13, 14, 15, 16, 17, 18 - сумматоры
19, 20, 21, 22 - фильтры
23 - дальномер
24, 25 - интеграторы
26 - датчик вмешательства летчика в управление самолетом
27 - двухпозиционный ключ с двумя контактными группами и одним управляющим входом
28 - инвертор
29, 30, 31 - блоки статических коэффициентов передачи сигналов
32 - датчик угла крена
33 - датчики вертикальной перегрузки, угловой скорости тангажа и угла атаки
34 - вычислитель комплексной системы управления КСУ
35 - рулевой привод
36 - поверхности управления самолетом в продольной плоскости
εг - угловое отклонение самолета от глиссады снижения (градус)
Vy - вертикальная скорость полета самолета (м/с)
ΔН* - сигнал оценки линейного отклонения самолета от глиссады снижения на выходе интегратора 24 (м)
ΔНизм - измеренное линейное отклонение самолета от глиссады снижения (м)
 - оценка линейного отклонения самолета от глиссады снижения (м)
- оценка линейного отклонения самолета от глиссады снижения (м)
 - оценка скорости линейного отклонения самолета от глиссады снижения (м/с)
- оценка скорости линейного отклонения самолета от глиссады снижения (м/с)
Dгрм - удаление самолета от ГРМ (м)
Dф - осредненное вторым фильтром 21 удаление самолета от ГРМ, (м)
γ - угол крена самолета (градус)
 - оценка вертикальной скорости полета самолета (м/с)
- оценка вертикальной скорости полета самолета (м/с)
±Nудоп - уровень ограничения предельных значений заданной перегрузки в единицах перегрузки (ед.пер.)
Δnузад - заданное значение избыточной вертикальной перегрузки (ед.пер.)
ny - вертикальная перегрузка самолета (ед.пер.)
ωz - угловая скорость тангажа самолета (градус/с)
α - угол атаки самолета (градус)
δ - угол отклонения поверхностей управления самолетом в продольной плоскости (градус).
Система автоматического управления самолетом при заходе на посадку содержит посадочную РТС, включающую в себя связанные через радиоканал наземный глиссадный радиомаяк ГРМ 1, бортовой глиссадный радиоприемник ГРП 2 и дальномер 23, блок умножения 4, первый вход которого соединен с выходом ГРП 2, вычислитель комплексной системы управления КСУ 34 и связанные с ним датчики 33 вертикальной перегрузки, угловой скорости тангажа и угла атаки, рулевой привод 35, вход которого соединен с выходом вычислителя КСУ 34, а выход - с поверхностями управления самолетом в продольной плоскости 36, первый 24 и второй 25 интеграторы, первый 11 и второй 12 сумматоры, фильтр 19. Система дополнительно содержит второй 21, третий 20 и четвертый 22 фильтры, третий 13, четвертый 14, пятый 15, шестой 16, седьмой 17 и восьмой 18 сумматоры, первый 5, второй 6, третий 7, четвертый 8, пятый 9 и шестой 10 нелинейные блоки, датчик вмешательства летчика в управление самолетом 26, датчик угла крена 32, инвертор 28, двухпозиционный ключ 27, первый 29, второй 30 и третий 31 блоки статических коэффициентов передачи сигналов, датчик вертикальной скорости полета самолета 3, выход которого соединен с первым входом первого сумматора 11, второй вход которого подключен к выходу первого фильтра 19, а выход - к входу первого интегратора 24, связанного своим выходом с первыми входами второго 12 и третьего 13 сумматоров, выход дальномера 23 через второй фильтр 21 и первый нелинейный блок 5 подключен к второму входу блока умножения 4, выход которого связан со вторым входом второго сумматора 12, подключенного своим выходом через первый 19 и третий 20 фильтры со вторым входом третьего сумматора 13 и с первым входом четвертого сумматора 14, второй вход которого соединен с выходом датчика вертикальной скорости полета самолета 3, выходы третьего 13 и четвертого 14 сумматоров соответственно через первый 29 и второй 30 блоки статических коэффициентов передачи сигналов соединены с первым и вторым входами пятого сумматора 15, выход которого соединен с первым входом шестого сумматора 16 и через последовательно соединенные четвертый фильтр 22, первый нормально-замкнутый контакт двухпозиционного ключа 27 и второй интегратор 25 - с первым входом седьмого сумматора 17, второй вход которого подключен к выходу датчика вертикальной скорости полета самолета 3, а выход - к входам инвертора 28 и третьего блока статического коэффициента передачи сигналов 31, соединенного своим выходом со вторым входом шестого сумматора 16, выход второго фильтра 21 через второй нелинейный блок 6 подключен к входу третьего нелинейного блока 7, второй вход которого соединен с выходом шестого сумматора 16, второй нормально-разомкнутый вход двухпозиционного ключа 27 подключен к выходу инвертора 28, а третий управляющий вход двухпозиционного ключа 27 - к выходу датчика вмешательства летчика в управление самолетом 26, датчик угла крена 32 через четвертый нелинейный блок 8 соединен с первым входом восьмого сумматора 18, второй и третий входы которого подключены соответственно к выходам третьего 7 и пятого 9 нелинейных блоков, вход пятого нелинейного блока 9 соединен с выходом датчика вертикальной скорости полета самолета 3, выход восьмого сумматора 18 через шестой нелинейный блок 10 подключен к входу вычислителя КСУ 34.
Система автоматического управления самолетом при заходе на посадку работает следующим образом.
При заходе на посадку на выходе ГРП 2 формируется сигнал εг углового отклонения самолета от глиссады снижения, равный

где Kг - крутизна сигналов посадочной РТС, приведенная к градусной мере,
ξ - помеха в сигнале на выходе ГРП 2.
При этом линейное отклонение самолета от глиссады снижения определяется по формуле:
ΔH=H-Hзад,
где Н - высота полета,
Нзад - заданное значение высоты полета на удалении Dгрм, определяемое глиссадой снижения с углом наклона ε0 и рассчитываемое по формуле
 .
.
Таким образом,

Далее формируется сигнал измеренного линейного отклонения самолета от глиссады снижения ΔНизм, рассчитываемый по формуле

откуда с учетом соотношения (3) получается

где  - приведенная к линейному отклонению помеха в сигнале εг.
- приведенная к линейному отклонению помеха в сигнале εг.
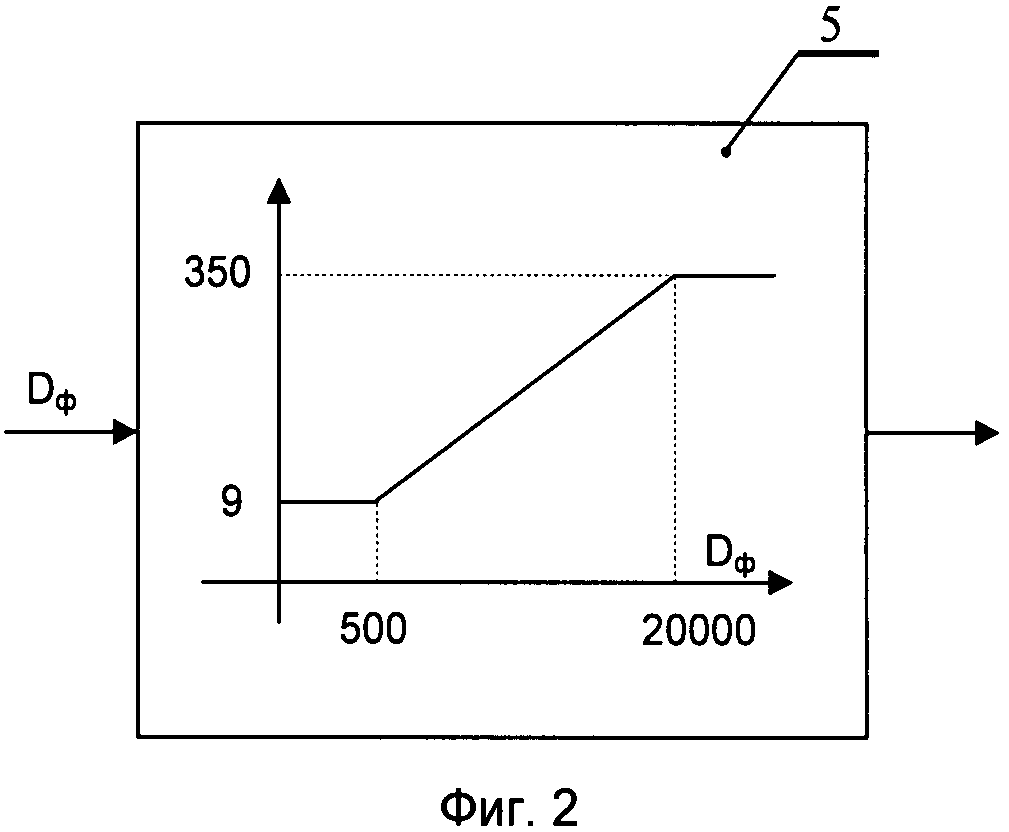
Сигнал ΔНизм в заявленной системе реализуется путем умножения сигнала εг с выхода ГРП 2 на сигнал Dгрм с выхода дальномера 23, предварительно пропущенный через второй фильтр 21 с передаточной функцией  и первый нелинейный блок 5. Второй фильтр 21 предназначен для фильтрации сигнала Dгрм от помех и для защиты этого сигнала от возможных на практике случайных кратковременных пропаданий. В первом нелинейном блоке 5 реализуется зависимость
и первый нелинейный блок 5. Второй фильтр 21 предназначен для фильтрации сигнала Dгрм от помех и для защиты этого сигнала от возможных на практике случайных кратковременных пропаданий. В первом нелинейном блоке 5 реализуется зависимость  с ограничениями «сверху» на удалениях от ГРМ 1 свыше 20000 м и «снизу» на удалении менее 500 м от ГРМ 1 (фиг.2).
с ограничениями «сверху» на удалениях от ГРМ 1 свыше 20000 м и «снизу» на удалении менее 500 м от ГРМ 1 (фиг.2).
При дифференцировании соотношения (4) по времени получается следующее выражение для скорости линейного отклонения самолета от глиссады снижения

где V - скорость полета самолета.
В соответствии с фиг.1 для сигнала ΔН* на выходе интегратора 24 с использованием принципа суперпозиции получается следующее выражение:

где W1(p)- передаточная функция первого фильтра 19.
После замены Vy из формулы (7) и ΔНизм из формулы (6) получается

При номинальном значении Kг=1 первое слагаемое в формуле (9) приводится к виду
 ,
,
после чего

В соответствии с фиг.1 получается следующее выражение для сигнала  оценки отклонения самолета от глиссады снижения на выходе третьего сумматора 13:
оценки отклонения самолета от глиссады снижения на выходе третьего сумматора 13:

где W2(p) - передаточная функция третьего фильтра 20.
После подстановки в формулу (11) выражений (10) и (6) при Kг=1 после преобразований получается следующее соотношение:

Сигнал  оценки скорости линейного отклонения самолета от глиссады снижения на выходе четвертого сумматора 14, как следует из фиг.1, имеет вид
оценки скорости линейного отклонения самолета от глиссады снижения на выходе четвертого сумматора 14, как следует из фиг.1, имеет вид

откуда после подстановки выражений (10), (7) и (6) при Kг=1 после преобразований получается следующее выражение для сигнала

Анализ полученных для сигналов  и
выражений (12) и (14) позволяет сделать следующие выводы.
и
выражений (12) и (14) позволяет сделать следующие выводы.
1) На практике, при медленном изменении скорости полета, когда производная скорости  , при любой сложности структуры фильтров W1(p) и W2(p) вида
, при любой сложности структуры фильтров W1(p) и W2(p) вида
 ,
,
где n - порядок фильтров (обычно n≤2);
аn, аn-1… - постоянные коэффициенты,
вторые слагаемые в формулах (12) и (14) обращаются в ноль, поскольку в них возникает необходимость умножения на
.
2) Надлежащим выбором фильтров W1(p) и W2(p) помеху измерения ξH можно понизить до приемлемого уровня.
Так, при n=1 и  ,
,  - эквивалентные фильтры по помехе ξH в (12) и (14) принимают вид
- эквивалентные фильтры по помехе ξH в (12) и (14) принимают вид
 ,
,
 .
.
Помеха типа «герцовка» вида ξH =Sin(6,28·t), где t - время, ослабляется этими фильтрами соответственно в 10 и 20 раз, т.е. на порядок.
Таким образом, с высокой степенью точности можно считать, что в заявляемой системе автоматического управления самолетом при заходе на посадку
 ;
;  ,
,
т.е. сигнал  оценки отклонения самолета от глиссады снижения, получаемый на выходе третьего сумматора 13, с высокой точностью соответствует истинному значению линейного отклонения самолета от глиссады, а сигнал
оценки отклонения самолета от глиссады снижения, получаемый на выходе третьего сумматора 13, с высокой точностью соответствует истинному значению линейного отклонения самолета от глиссады, а сигнал  оценки скорости линейного отклонения самолета от глиссады снижения, полученный на выходе четвертого сумматора 14 - истинному значению скорости линейного отклонения самолета от глиссады, причем независимо от сложности (от порядка n) фильтров 19, 21.
оценки скорости линейного отклонения самолета от глиссады снижения, полученный на выходе четвертого сумматора 14 - истинному значению скорости линейного отклонения самолета от глиссады, причем независимо от сложности (от порядка n) фильтров 19, 21.
Сигнал
с выхода третьего сумматора 13, проходя через первый блок статического коэффициента передачи сигналов 29, и сигнал
с выхода четвертого сумматора 14, проходя через второй блок статического коэффициента передачи сигналов 30, совместно формируют на выходе пятого сумматора 15 сигнал заданной перегрузки

где i, µ - передаточные числа в первом и втором блоках статических коэффициентов передачи сигналов 29, 30.
Далее этот сигнал отрабатывается контуром отработки заданной перегрузки, включающим в себя вычислитель КСУ и самолет. Отработка перегрузки осуществляется с определенной динамикой, при этом на посадочных режимах полета самолета доминирующую составляющую в переходном процессе можно аппроксимировать в виде реакции апериодического звена с постоянной времени Т≈1 с.Этот факт используется далее для получения оценки вертикальной скорости полета самолета в соответствии с известной зависимостью
где g - ускорение свободного падения,
t - текущее время,
Δny=(ny-1) - избыточная перегрузка, действующая на самолет,
dt - приращение времени.
Сигнал Δnузад1 с выхода пятого сумматора 15 поступает на вход четвертого фильтра 22 с передаточной функцией  , сигнал на выходе которого близок к доминирующей составляющей в сигнале Δny(t), действующей на самолет. На выходе интегратора 25, вход которого через нормально-замкнутый контакт двухпозиционного ключа 27 соединен с выходом четвертого фильтра 22, получается сигнал
, сигнал на выходе которого близок к доминирующей составляющей в сигнале Δny(t), действующей на самолет. На выходе интегратора 25, вход которого через нормально-замкнутый контакт двухпозиционного ключа 27 соединен с выходом четвертого фильтра 22, получается сигнал

близкий по величине и обратный по знаку к текущему значению вертикальной скорости полета самолета Vy. За счет этого сигнал на выходе седьмого сумматора 17, определяемый в виде суммы сигналов  , близок к нулю. Такая схема включения интегратора 25 для ликвидации ошибки ΔH отклонения самолета от глиссады позволяет улучшить по сравнению с классическим вариантом включения интегратора в астатических системах динамические характеристики процессов управления. При этом необходимо отметить, что при вмешательстве летчика в управление самолетом сигнал с соответствующего датчика 26 переводит двухпозиционный ключ 27 в другое положение, при котором на вход интегратора 25 через инвертор 28 поступает сигнал с выхода седьмого сумматора 17. За счет этого на выходе интегратора 25 формируется сигнал, равный обратному по знаку значению вертикальной скорости полета самолета Vy, а сигнал на выходе седьмого сумматора 17 в момент окончания вмешательства летчика в управление самолетом равен нулю.
, близок к нулю. Такая схема включения интегратора 25 для ликвидации ошибки ΔH отклонения самолета от глиссады позволяет улучшить по сравнению с классическим вариантом включения интегратора в астатических системах динамические характеристики процессов управления. При этом необходимо отметить, что при вмешательстве летчика в управление самолетом сигнал с соответствующего датчика 26 переводит двухпозиционный ключ 27 в другое положение, при котором на вход интегратора 25 через инвертор 28 поступает сигнал с выхода седьмого сумматора 17. За счет этого на выходе интегратора 25 формируется сигнал, равный обратному по знаку значению вертикальной скорости полета самолета Vy, а сигнал на выходе седьмого сумматора 17 в момент окончания вмешательства летчика в управление самолетом равен нулю.
Таким образом, в заявляемой системе управления самолетом используется астатический закон формирования заданной перегрузки, при котором сигнал на выходе шестого сумматора 16 имеет вид

где λ - передаточное число, реализованное в третьем блоке статического коэффициента передачи сигналов 31.
Кроме этого заявляемая система управления самолетом при заходе на посадку имеет следующие существенные отличия.
1. Сигнал заданной перегрузки Δnузад, вычисляемый по формуле (18), ограничивается по величине в зависимости от удаления Dгрм самолета от ГРМ. Для этого сигнал Δnузад с выхода шестого сумматора 16 пропускается через третий нелинейный блок 7, реализующий функцию ограничения сигнала по величине. Величина ограничения регулируется вторым нелинейным блоком 6, а именно уровень ограничения уменьшается по мере приближения самолета к взлетно-посадочной полосе (ВПП). Характеристики второго и третьего нелинейных блоков 6 и 7 показаны на фиг.3. Уменьшение возможных максимальных значений заданной перегрузки по мере приближения к ВПП, т.е. по мере снижения самолета до малых высот, повышает безопасность выполнения режима захода на посадку. Тем самым повышается надежность системы управления самолетом.
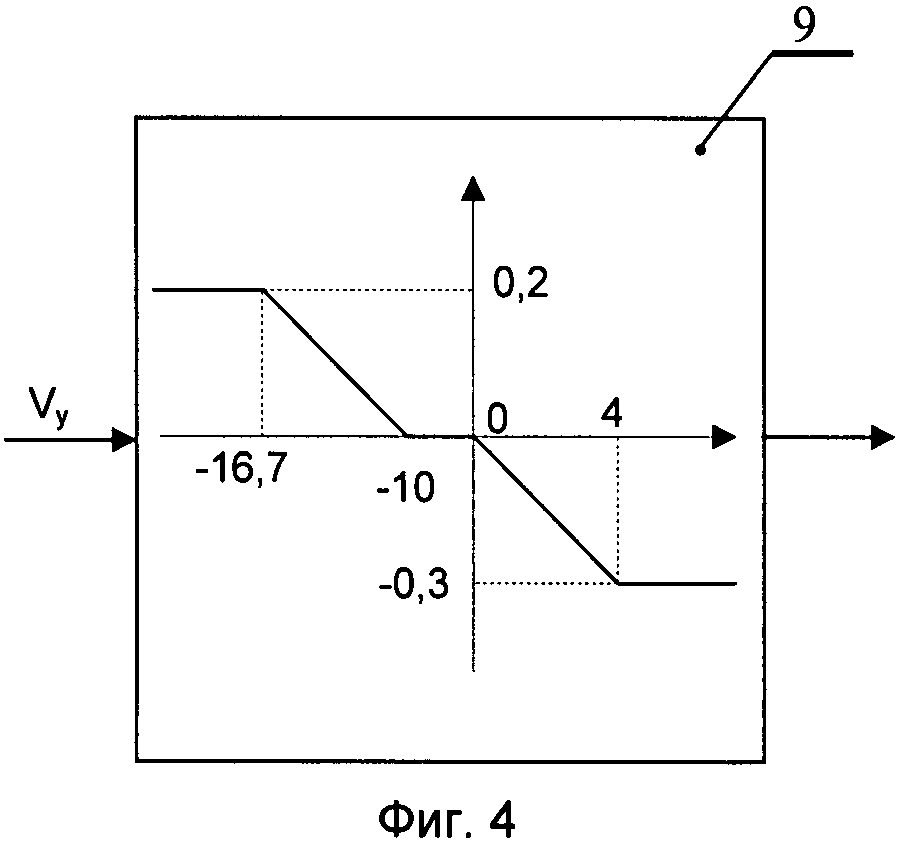
2. Штатному режиму выполнения автоматического захода на посадку свойственны значения вертикальной скорости полета самолета Vy в пределах от 0 до -10 м/с при номинальном значении -5 м/с. Выход вертикальной скорости полета самолета Vy из указанных пределов свидетельствует о возникновении (в том числе по объективным причинам) нештатной ситуации, наиболее опасной на малых высотах полета. В этих случаях пятым нелинейным блоком 9, характеристика которого представлена на фиг.4, формируется дополнительный сигнал заданной перегрузки, отработка которого самолетом способствует возвращению вертикальной скорости полета самолета в рабочую область значений 0>Vy>-10 м/с. За счет этого повышается безопасность выполнения режима захода на посадку и надежность системы управления самолетом.
3. Как известно, при крене самолета происходит потеря высоты, следствием чего является отклонение самолета от глиссады снижения. Возникающая при этом и устраняемая затем системой управления динамическая ошибка стабилизации самолета на глиссаде может достигать существенных значений. Для снижения подобных ошибок стабилизации, т.е. для повышения точности работы системы, четвертым нелинейным блоком 8 формируется дополнительный сигнал заданной перегрузки
 ,
,
компенсирующий возникающую при крене отрицательную перегрузку самолета. Подобная компенсация повышает точность работы системы управления.
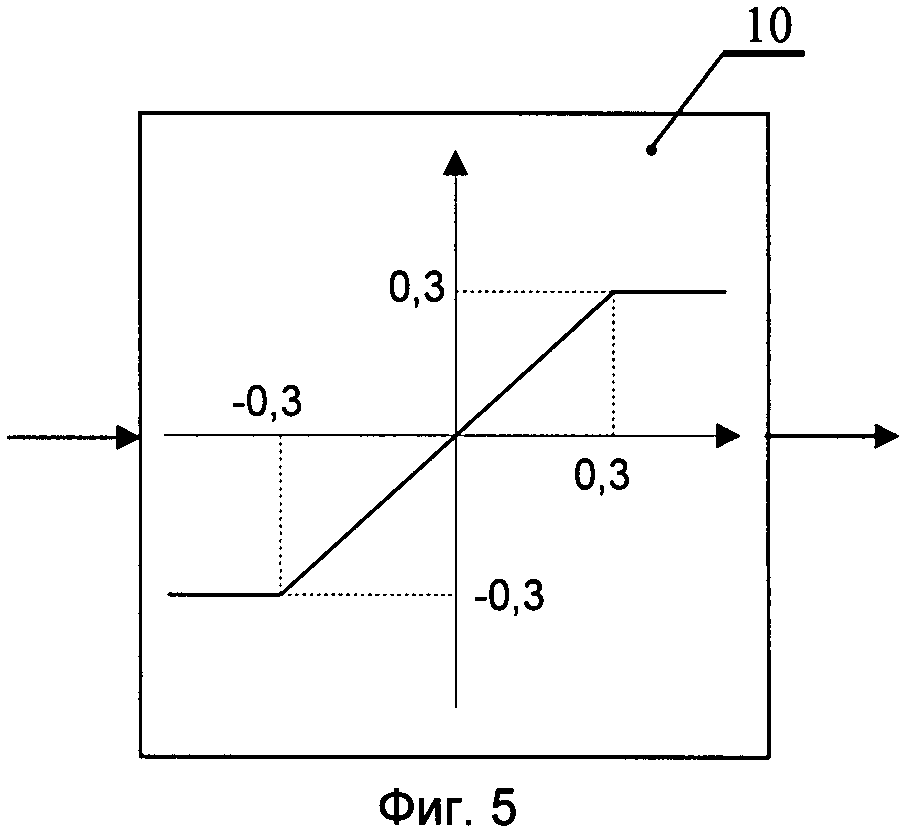
4. При выполнении автоматического захода на посадку перегрузки, действующие на самолет, не превышают значений ±0,3 ед.пер. Для предотвращения выхода самолета на большие перегрузки, особенно опасные на малых высотах полета, в шестом нелинейном блоке 10, характеристика которого представлена на фиг.5, происходит ограничение заданной перегрузки на уровне ±0,3 ед.пер. За счет этого повышается безопасность выполнения режима захода на посадку и надежность системы управления самолетом.
Получаемый на выходе шестого нелинейного блока 10 сигнал заданной перегрузки Δnузад отрабатывается далее вычислителем КСУ 34, рулевым приводом 35 и поверхностями управления самолетом в продольной плоскости 36.
Система автоматического управления самолетом при заходе на посадку, содержащая посадочную радиотехническую систему, включающую в себя связанные через радиоканал наземный глиссадный радиомаяк, бортовой глиссадный радиоприемник и дальномер, блок умножения, первый вход которого соединен с выходом бортового глиссадного радиоприемника, вычислитель комплексной системы управления и связанные с ним датчики вертикальной перегрузки, угловой скорости тангажа и угла атаки, рулевой привод, вход которого соединен с выходом вычислителя комплексной системы управления, а выход соединен с поверхностями управления самолетом в продольной плоскости, первый и второй интеграторы, первый и второй сумматоры, фильтр, отличающаяся тем, что система дополнительно содержит второй, третий и четвертый фильтры, шесть сумматоров, шесть нелинейных блоков, датчик вмешательства летчика в управление самолетом, датчик угла крена, инвертор, двухпозиционный ключ, три блока статических коэффициентов передачи сигналов, датчик вертикальной скорости полета самолета, при этом выход датчика вертикальной скорости полета самолета соединен с первым входом первого сумматора, второй вход которого подключен к выходу первого фильтра, а выход подключен к входу первого интегратора, связанного своим выходом с первыми входами второго и третьего сумматоров, выход дальномера через второй фильтр и первый нелинейный блок подключен к второму входу блока умножения, выход которого связан со вторым входом второго сумматора, подключенного своим выходом через первый и третий фильтры со вторым входом третьего сумматора и с первым входом четвертого сумматора, второй вход которого соединен с выходом датчика вертикальной скорости полета самолета, выходы третьего и четвертого сумматоров соответственно через первый и второй блоки статических коэффициентов передачи сигналов соединены с первым и вторым входами пятого сумматора, выход которого соединен с первым входом шестого сумматора и через последовательно соединенные четвертый фильтр, первый нормально-замкнутый контакт двухпозиционного ключа и второй интегратор соединен с первым входом седьмого сумматора, второй вход которого подключен к выходу датчика вертикальной скорости полета самолета, а выход подключен к входам инвертора и третьего блока статического коэффициента передачи сигналов, соединенного своим выходом со вторым входом шестого сумматора, выход второго фильтра через второй нелинейный блок подключен к входу третьего нелинейного блока, второй вход которого соединен с выходом шестого сумматора, второй нормально-разомкнутый контакт двухпозиционного ключа соединен с выходом инвертора, а третий управляющий вход двухпозиционного ключа соединен с выходом датчика вмешательства летчика в управление самолетом, датчик угла крена через четвертый нелинейный блок соединен с первым входом восьмого сумматора, второй и третий входы которого подключены соответственно к выходам третьего и пятого нелинейных блоков, вход пятого нелинейного блока соединен с выходом датчика вертикальной скорости полета самолета, выход восьмого сумматора через шестой нелинейный блок подключен к входу вычислителя комплексной системы управления.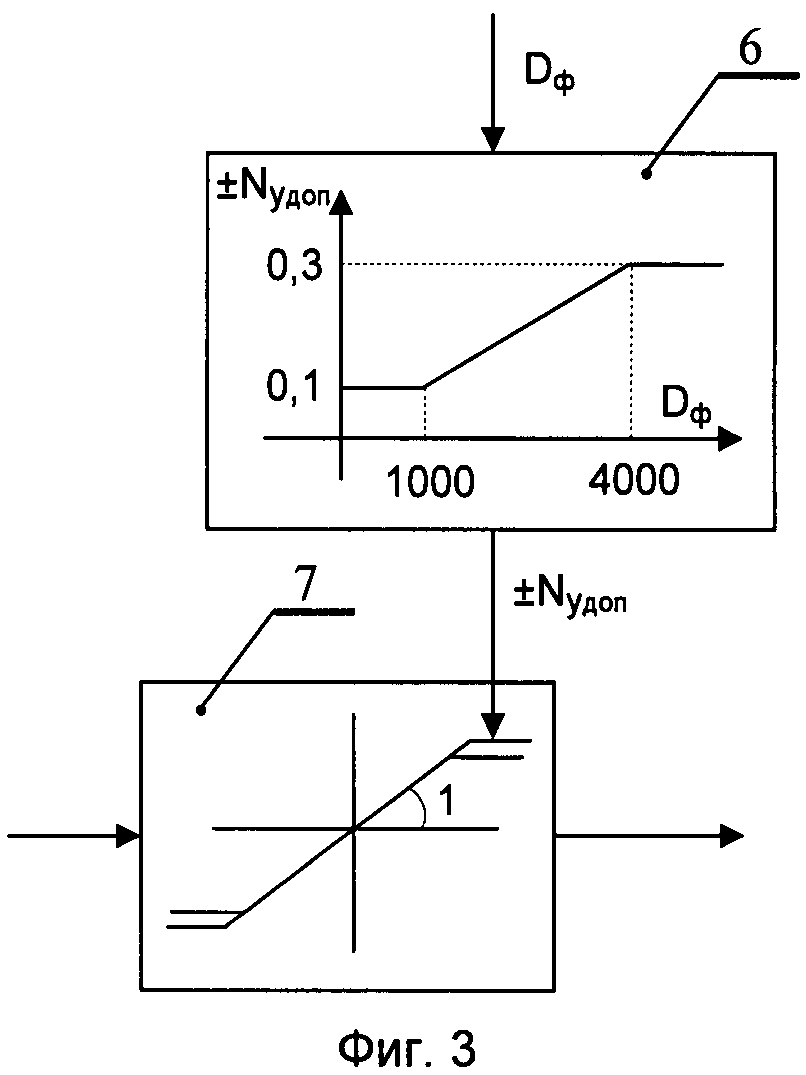
Способ моделирования динамики полета летательного аппарата и моделирующий комплекс для его осуществления
Устройство обнаружения отказов в резервированной системе
Устройство восстановления работоспособности системы, резервированной с помощью мажоритарных элементов
Способ управления летательным аппаратом при заходе на посадку
Способ определения чувствительности опухоли легкого к терапии ингибиторами тирозинкиназ
Способ вертебропластики
Способ захода самолета на посадку в аварийных условиях (варианты)
Способ контроля дистанций между ведущим и ведомым самолетами при полете по маршруту с эшелонированием по высоте
Устройство обнаружения факта наведения самонаводящегося по радиоизлучению оружия на радиоэлектронное средство, защищенное отвлекающим устройством
Комплексная система управления траекторией летательного аппарата при заходе на посадку
Способ моделирования динамики полета летательного аппарата и моделирующий комплекс для его осуществления
Способ управления летательным аппаратом при заходе на посадку
Способ определения чувствительности опухоли легкого к терапии ингибиторами тирозинкиназ
Способ вертебропластики
Устройство обнаружения факта наведения самонаводящегося по радиоизлучению оружия на радиоэлектронное средство, защищенное отвлекающим устройством
Комплексная система управления траекторией летательного аппарата при заходе на посадку
Электромеханический мини-привод поступательного действия
Модульный молекулярный конъюгат для направленной доставки генетических конструкций и способ его получения
Способ оценки изображения коллиматорного авиационного индикатора и диафрагма для его осуществления
Молекулярные конъюгаты с поликатионным участком и лигандом для доставки в клетку и ядро клетки днк и рнк

