Результат интеллектуальной деятельности: СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ СНИЖЕНИИ НА ЭТАПЕ СТАБИЛИЗАЦИИ ВЫСОТЫ КРУГА
Вид РИД
Изобретение
Изобретение относится к области авиационной техники, а именно к системе автоматического управления самолетом в продольной плоскости при снижении в режиме «возврат» на аэродром на этапе стабилизации высоты круга.
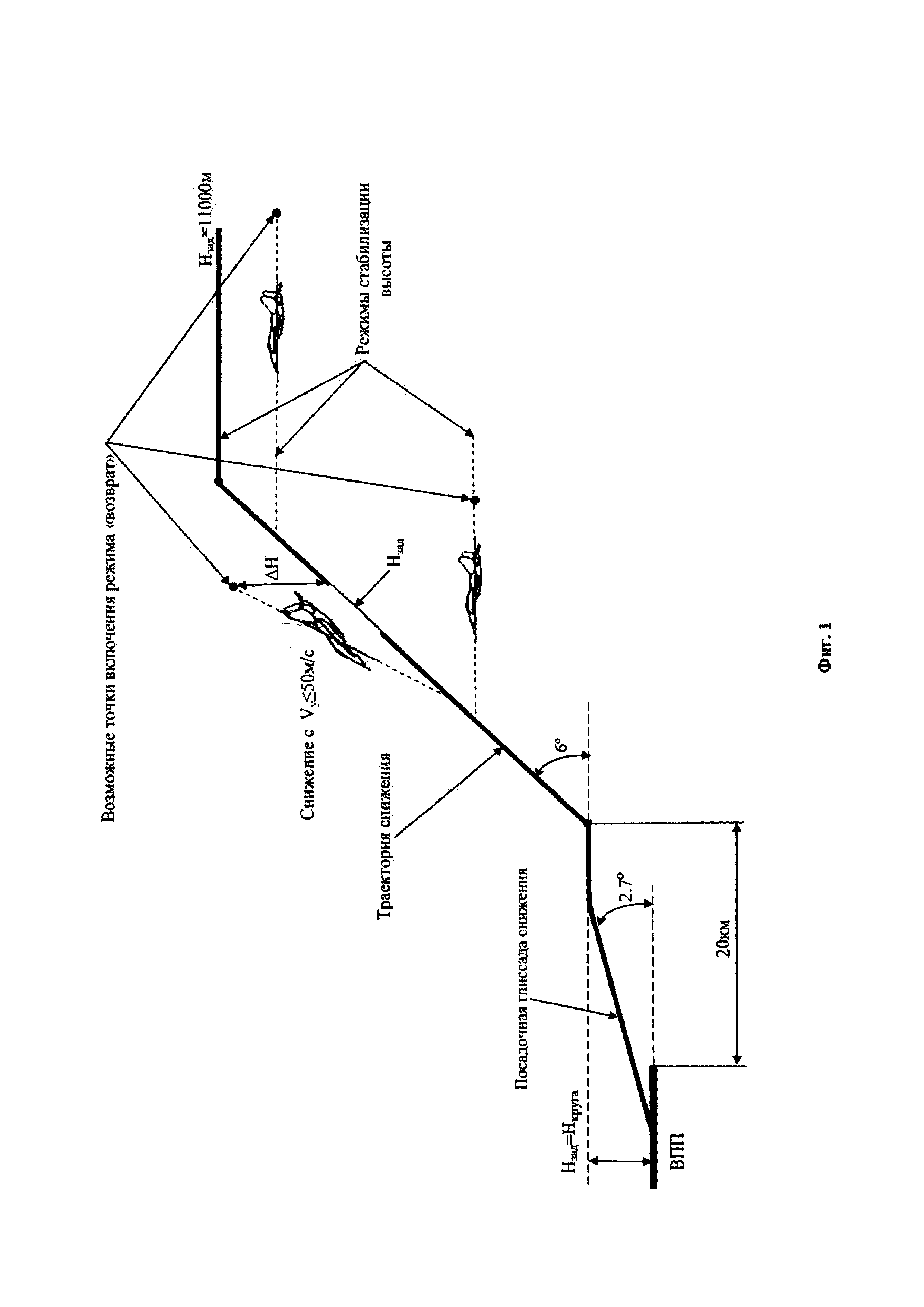
Логика автоматического управления самолетом при выполнении режима «возврат» заключается в обеспечении вначале снижения по прямо-линейной траектории с углом наклона 6° к плоскости горизонта, последующего перевода в режим стабилизации постоянной высоты (т.н. высоты круга, номинальное значение которой составляет 600 м) и заключительного снижения в режиме захода на посадку по посадочной глиссаде с углом наклона 2°40' к плоскости горизонта (фиг. 1).
К процессу перехода с прямолинейной траектории снижения с углом наклона 6° к плоскости горизонта на заданную высоту круга предъявляются жесткие требования - летчиками по условиям безопасности пилотирования не допускаются отклонения по высоте («провалы») ниже высоты круга.
Известна система автоматической стабилизации заданной высоты полета самолета, использующая в своей работе сигналы угловой скорости тангажа, линейного отклонения и скорости линейного отклонения от заданной высоты (Михалев И.А., Окоемов Б.Н., Павлина И.Г., Чикулаев М.С., Киселев Ю.Ф. Системы автоматического и директорного управления самолетом. М., Машиностроение, 1974, 232 с, рис. 2.4, с. 40). Отсутствие сигнала перегрузки в законах управления в этой системе снижает точность стабилизации высоты при ветровых возмущениях.
Другой известной системе автоматической стабилизации заданной высоты полета самолета, использующей в своей работе сигналы угловой скорости тангажа, линейного отклонения от заданной траектории и угла тангажа (Михалев И.А., Окоемов Б.Н., Павлина И.Г., Чикулаев М.С., Киселев Ю.Ф. Системы автоматического и директорного управления самолетом. М., Машиностроение, 1974, 232 с, рис. 2.5а, с. 44), присущ тот же недостаток - заниженные характеристики ветроустойчивости (Михалев И.А., Окоемов Б.Н., Чикулаев М.С. Системы автоматической посадки. М., Машиностроение, 1975, 216 с, с. 99).
Наиболее близкой к заявляемой системе (прототипом) является система автоматического управления (САУ) самолетом при снижении, представленная в патенте RU 2542686. Данная САУ обеспечивает высокие динамические и статические характеристики процессов стабилизации на прямолинейной траектории снижения с углом наклона 6° к плоскости горизонта. Однако при переходе в режим стабилизации высоты круга системе управления, как будет показано ниже, свойственны существенные отклонения по высоте ниже заданной высоты круга. Такие «провалы» по высоте недопустимы, т.к. с точки зрения летчиков это может свидетельствовать об отказе системы управления. Кроме того, динамические характеристики процессов выхода на высоту круга оставляют желать лучшего с точки зрения перерегулирования, быстродействия и максимальных величин действующих перегрузок.
Целью изобретения является ликвидация отклонений по высоте ниже заданной высоты круга, повышение безопасности пилотирования самолетом, улучшение динамических характеристик системы автоматического управления.
Технический результат достигается тем, что система автоматического управления самолетом при снижении на этапе стабилизации высоты круга содержит навигационно-измерительный комплекс, на первом выходе которого сформирован сигнал линейного отклонения самолета по высоте от заданной траектории снижения, а на втором - сигнал вертикальной скорости самолета, первый и второй масштабные блоки, первый сумматор, первый и второй входы которого подключены соответственно к выходам первого и второго масштабных блоков, рулевой привод, руль высоты самолета, соединенный с выходом рулевого привода, первый и второй нелинейные блоки, второй, третий и четвертый сумматоры, интегратор, блок перемножения сигналов, перегрузочный автомат продольного управления (АПУ), а навигационно-измерительный комплекс снабжен третьим выходом, на котором формируется сигнал текущей высоты полета самолета, при этом первый и второй входы первого нелинейного блока подключены соответственно к первому и третьему выходам навигационно-измерительного комплекса, второй выход которого соединен с первыми входами второго и четвертого сумматоров, выход первого нелинейного блока подключен к входам второго нелинейного блока и к первому входу третьего сумматора, второй инвертирующий вход которого соединен с выходом интегратора, а выход - со вторым входом второго сумматора и с первым входом блока перемножения сигналов, второй вход которого соединен с выходом второго нелинейного блока, выход четвертого сумматора подключен к входу второго масштабного блока, вход интегратора соединен с выходом второго сумматора, выход первого сумматора, формирующий сигнал заданной вертикальной перегрузки, подключен к входу перегрузочного АПУ, выход которого соединен с входом рулевого привода, отличающаяся тем, что дополнительно содержит первый ключ, нормально замкнутый контакт которого соединен с выходом первого нелинейного блока, а выход - с входом первого масштабного блока, второй ключ, через нормально замкнутый контакт которого выход блока перемножения соединен с вторым входом четвертого сумматора, задатчик высоты круга, пятый сумматор, первый вход которого подключен к третьему входу навигационно-измерительного блока, второй инвертирующий вход - к выходу задатчика высоты круга, а выход которого соединен с нормально разомкнутым входом первого ключа, датчик скорости полета, блок логики, входы которого соединены с выходами датчика скорости и пятого сумматора, а выход подключен к управляющим входам первого и второго ключей.
Сущность изобретения поясняется графическими изображениями:
на фиг. 1 представлена схема снижения самолета в режиме возврата на аэродром;
на фиг. 2 представлена заявляемая система автоматического управления самолетом при снижении на этапе стабилизации высоты круга;
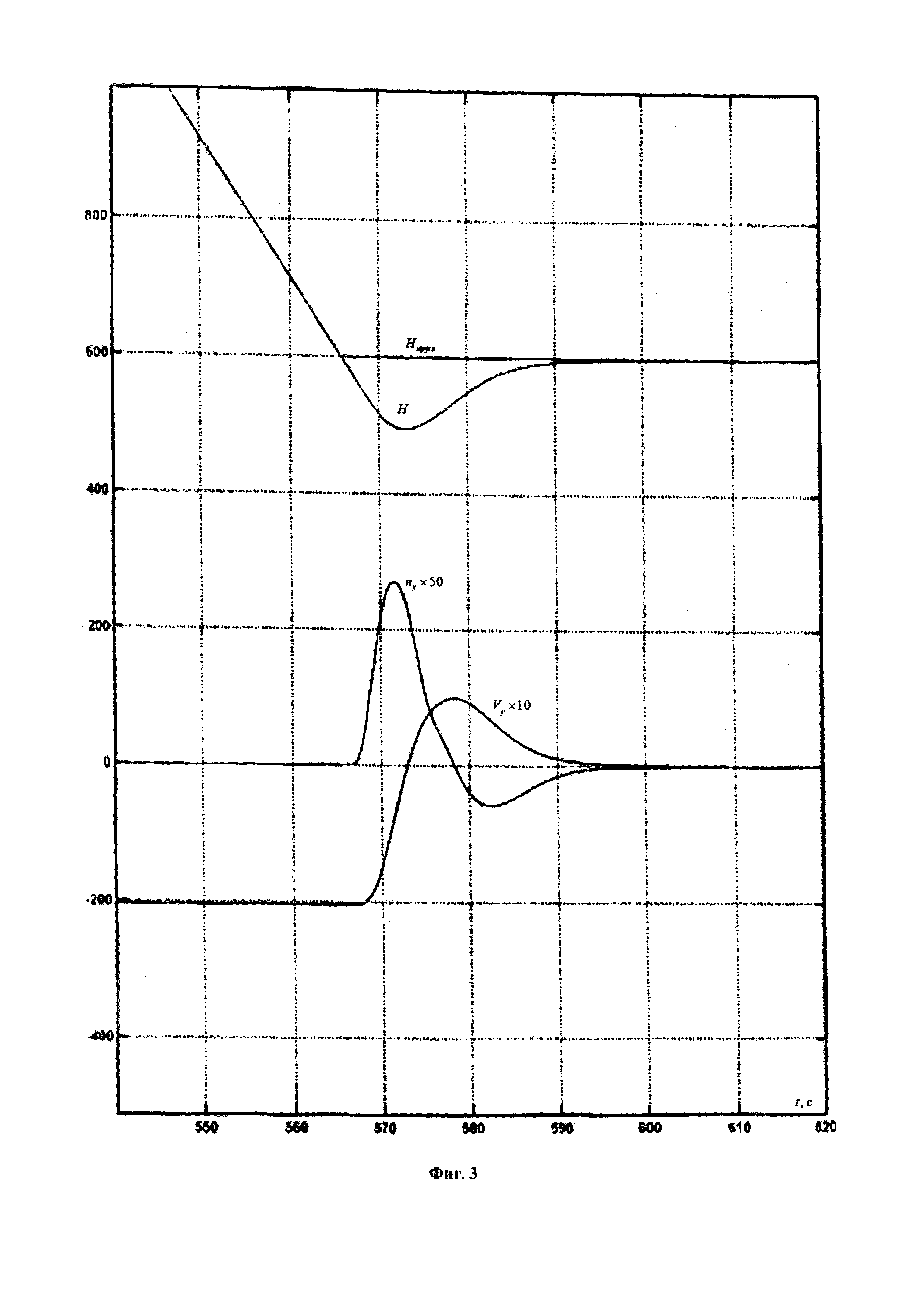
на фиг. 3 изображен переходный процесс изменения высоты полета при переходе в режим стабилизации высоты круга в системе-прототипе;
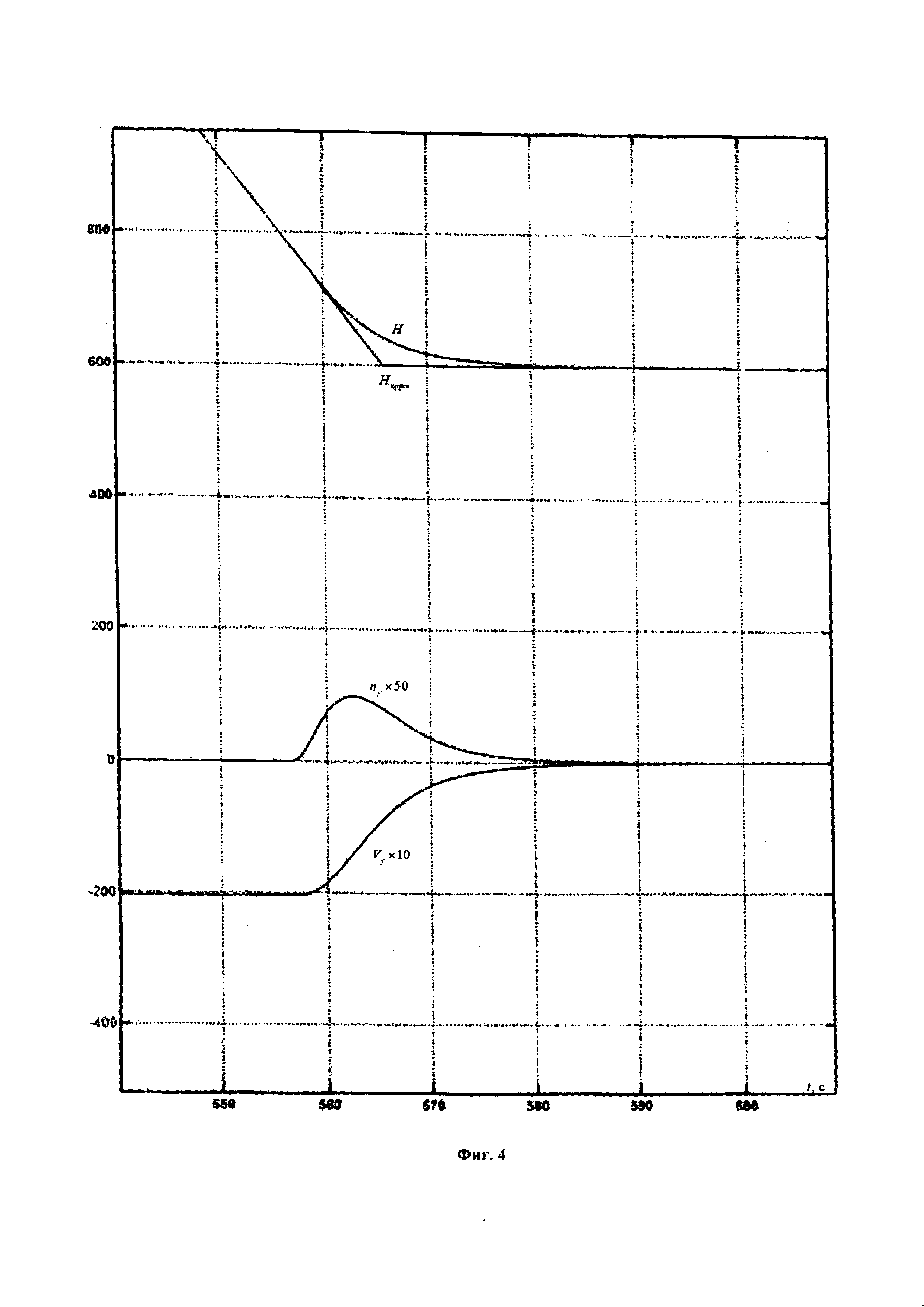
на фиг. 4 показан переходный процесс изменения высоты полета при переходе в режим стабилизации высоты круга с использованием предлагаемой системой управления.
На фиг. 1-4 использованы следующие обозначения:
1 - навигационно-измерительный комплекс;
2, 3 - первый и второй масштабные блоки соответственно;
4, 5, 6, 7 - первый, второй, третий и четвертый сумматоры соответственно;
8, 9 - первый и второй нелинейные блоки соответственно;
10 - интегратор;
11 - блок перемножения сигналов;
12 - перегрузочный автомат продольного управления (АПУ);
13 - рулевой привод;
14 - руль высоты;
15, 16 - ключи;
17 - задатчик высоты круга;
18 - пятый сумматор;
19 - датчик скорости полета самолета;
20 - блок логики;
Vy - вертикальная скорость самолета;
 - сигнал оценки постоянной составляющей вертикальной скорости самолета;
- сигнал оценки постоянной составляющей вертикальной скорости самолета;
ΔVy - сигнал скорости линейного отклонения самолета по высоте от заданной траектории снижения;
Δnузад _ сигнал заданной избыточной вертикальной перегрузки;
Δnу - избыточная вертикальная перегрузка;
ΔН - сигнал линейного отклонения самолета по высоте от заданной траектории снижения;
ΔНогр - ограниченный по уровню сигнал линейного отклонения самолета по высоте от заданной траектории снижения;
Н - текущая высота полета самолета;
Нзад - заданная высота полета самолета;
Нкруга - высота круга;
КΔH - масштабный коэффициент первого масштабного блока;
KVy - масштабный коэффициент второго масштабного блока;
δв - отклонение руля высоты самолета;
ВПП - взлетно-посадочная полоса;
"Ключ" - сигнал управления ключами;
t - время, с.
Заявляемая система автоматического управления самолетом (фиг. 2) содержит навигационно-измерительный комплекс 1, на первом выходе которого формируется сигнал ΔН линейного отклонения самолета по высоте от заданной траектории снижения, а на втором - сигнал Vy вертикальной скорости самолета. Также система содержит первый 2 и второй 3 масштабные блоки, первый сумматор 4, входы которого подключены к выходам первого 2 и второго 3 масштабных блоков, рулевой привод 13, руль высоты 14 самолета, соединенный с выходом рулевого привода 13, первый 8 и второй 9 нелинейные блоки, второй 5, третий 6 и четвертый 7 сумматоры, интегратор 10, блок перемножения сигналов 11, перегрузочный автомат продольного управления (АПУ) 12, навигационно-измерительный комплекс 1 снабжен третьим выходом, на котором формируется сигнал Н текущей высоты полета самолета, при этом первый и второй входы первого нелинейного блока 8 подключены соответственно к первому и третьему выходам навигационно-измерительного комплекса 1, второй выход которого соединен с первыми входами второго 5 и четвертого 7 сумматоров, выход первого нелинейного блока 8 подключен к входам второго нелинейного блока 9 и к первому входу третьего сумматора 6, второй инверторующий вход которого соединен с выходом интегратора 10, а выход - со вторым входом второго сумматора 5 и с первым входом блока перемножения сигналов 11, второй вход которого соединен с выходом второго нелинейного блока 9, выход четвертого сумматора 7 подключен к входу второго масштабного блока 3, вход интегратора 10 соединен с выходом второго сумматора 5, выход первого сумматора 4, формирующий сигнал Δnузад заданной вертикальной перегрузки, подключен к входу перегрузочного АПУ 12, выход которого соединен с входом рулевого привода 13. Дополнительно система управления содержит первый ключ 15, нормально замкнутый контакт которого соединен с выходом первого нелинейного блока 8, а выход - с входом первого масштабного блока 2, второй ключ 16, через нормально замкнутый контакт которого выход блока перемножения 11 соединен с вторым входом четвертого сумматора 7, задатчик 17 высоты круга, пятый сумматор 18, первый вход которого подключен к третьему выходу навигационно-измерительного блока 1, второй инвертирующий вход - к выходу задатчика 17 высоты круга, выход пятого сумматора 18 соединен с нормально разомкнутым контактом первого ключа 15, датчик скорости полета 19, блок логики 20, входы которого соединены с выходами датчика скорости 19 и пятого сумматора 18, а выход блока логики 20 подключен к управляющим входам первого 15 и второго 16 ключей.
Заявляемая система автоматического управления самолетом на этапе снижения по прямолинейной траектории с углом наклона 6° к плоскости горизонта работает так же, как описано в прототипе (патент RU 2542686 C1): с помощью первого нелинейного блока 8 обеспечивается ограничение вертикальной скорости снижения самолета на уровне не выше 50 м/с, а за счет того, что на выходе сумматора 4 формируется сигнал разности 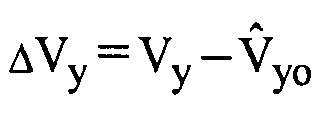 ликвидируется постоянное смещение центра масс самолета относительно траектории снижения. На этом этапе командный сигнал управления формируется на выходе сумматора 4 через нормально-замкнутые контакты ключей 15 и 16 в виде
ликвидируется постоянное смещение центра масс самолета относительно траектории снижения. На этом этапе командный сигнал управления формируется на выходе сумматора 4 через нормально-замкнутые контакты ключей 15 и 16 в виде

обеспечивающем требуемое качество переходных процессов стабилизации самолета на траектории снижения.
В определенный момент времени происходит переключение контактов ключей 15 и 16 в верхнее положение. Это приводит к тому, что сиг-нал заданной перегрузки на выходе сумматора 4 меняется и приобретает вид

соответствующий режиму стабилизации высоты круга.
Момент переключения ключей 15, 16 в новое (верхнее) положение определяется в соответствии с равенством (2) из условия равенства нулю сигнала заданной перегрузки и того факта, что при снижении самолета по заданной траектории с углом наклона 6° к плоскости горизонта сигнал вертикальной скорости равен

Как следует из (2), в этом случае сигнал  должен иметь вполне определенное значение, равное
должен иметь вполне определенное значение, равное 
Таким образом, момент переключения системы управления из ре-жима снижения по заданной траектории с углом наклона 6° к плоскости горизонта в режим стабилизации высоты круга соответствует условию

Выполнение этого условия контролируется в блоке логики 20 на основании сравнения вычисленного значения (ΔНкруга)* по информации о скорости полета V, априорно заданных величинах коэффициентов KΔн и  в первом и втором масштабных блоках 2 и 3 с текущим значением сигнала ΔНкруга. В случае выполнения условия (5) блок логики 20 формирует на своем выходе логический сигнал «Ключ», с помощью которого ключи 15, 16 переключаются в верхнее положение, а система управления переводится, тем самым, в режим стабилизации высоты круга.
в первом и втором масштабных блоках 2 и 3 с текущим значением сигнала ΔНкруга. В случае выполнения условия (5) блок логики 20 формирует на своем выходе логический сигнал «Ключ», с помощью которого ключи 15, 16 переключаются в верхнее положение, а система управления переводится, тем самым, в режим стабилизации высоты круга.
Заявляемая система автоматического управления самолетом при снижении на этапе стабилизации высоты круга обеспечивает:
- отсутствие «просадок» по высоте относительно заданной высоты круга и повышение, за счет этого, безопасности пилотирования самолетом;
- лучшие, по сравнению с прототипом, динамические характеристики процессов выведения самолета на заданную высоту круга (за меньшее время, без перерегулирования).
Наличие этих преимуществ иллюстрируется графиками процессов вывода самолета на заданную высоту круга, представленными на фиг. 3 (прототип) и на фиг. 4 (заявляемая САУ). Графики получены в идентичных условиях: при одинаковых начальных условиях по скорости и высоте входа самолета на траекторию снижения с углом 6° к горизонту с последующим выходом на одну и ту же высоту круга ΔНкруга=600 м при одинаковых значениях коэффициентов KΔн и в первом и втором масштабных блоках 2 и 3. Из рассмотрения графиков следует, что переходные процессы по перегрузке, вертикальной скорости и по высоте в САУ-прототипе более длительны по времени, чем в заявляемой САУ, имеют значительное перерегулирование и, что неприемлемо - имеется значительный «провал» по высоте величиной 100 метров относительно высоты круга, равной 600 метров. Кроме того, вывод самолета на высоту круга осуществляется с большими по величине перегрузкой и вертикальной скоростью.
Отмеченные преимущества заявляемой САУ подтверждены летными испытаниями с положительными оценками летчиков.
Система автоматического управления самолетом при снижении на этапе стабилизации высоты круга, содержащая навигационно-измерительный комплекс, на первом выходе которого сформирован сигнал линейного отклонения самолета по высоте от заданной траектории снижения, а на втором - сигнал вертикальной скорости самолета, первый и второй масштабные блоки, первый сумматор, первый и второй входы которого подключены соответственно к выходам первого и второго масштабных блоков, рулевой привод, руль высоты самолета, соединенный с выходом рулевого привода, первый и второй нелинейные блоки, второй, третий и четвертый сумматоры, интегратор, блок перемножения сигналов, перегрузочный автомат продольного управления (АПУ), а навигационно-измерительный комплекс снабжен третьим выходом, на котором формируется сигнал текущей высоты полета самолета, при этом первый и второй входы первого нелинейного блока подключены соответственно к первому и третьему выходам навигационно-измерительного комплекса, второй выход которого соединен с первыми входами второго и четвертого сумматоров, выход первого нелинейного блока подключен к входам второго нелинейного блока и к первому входу третьего сумматора, второй инвертирующий вход которого соединен с выходом интегратора, а выход - со вторым входом второго сумматора и с первым входом блока перемножения сигналов, второй вход которого соединен с выходом второго нелинейного блока, выход четвертого сумматора подключен к входу второго масштабного блока, вход интегратора соединен с выходом второго сумматора, выход первого сумматора, формирующий сигнал заданной вертикальной перегрузки, подключен к входу перегрузочного АПУ, выход которого соединен с входом рулевого привода, отличающаяся тем, что дополнительно содержит первый ключ, нормально замкнутый контакт которого соединен с выходом первого нелинейного блока, а выход - с входом первого масштабного блока, второй ключ, через нормально замкнутый контакт которого выход блока перемножения соединен с вторым входом четвертого сумматора, задатчик высоты круга, пятый сумматор, первый вход которого подключен к третьему входу навигационно-измерительного блока, второй инвертирующий вход - к выходу задатчика высоты круга, выход пятого сумматора соединен с нормально разомкнутым входом первого ключа, датчик скорости полета, блок логики, входы которого соединены с выходами датчика скорости и пятого сумматора, а выход блока логики подключен к управляющим входам первого и второго ключей.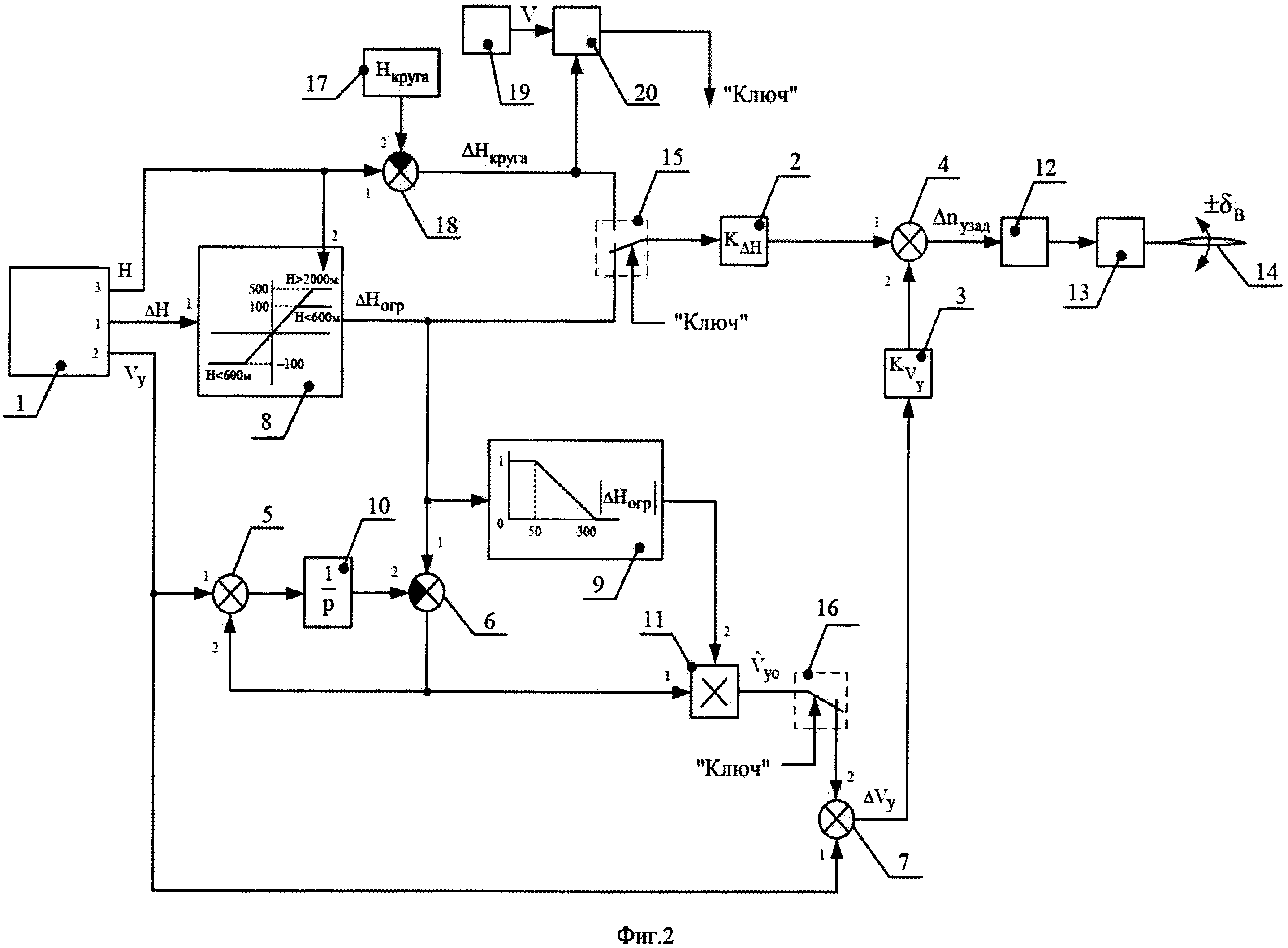
Система объективного контроля
Система автоматического управления самолетом при снижении
Способ корректировки облика летательного аппарата по величине радиолокационной заметности
Универсальный имитатор авиационных средств поражения и способ проверки работы бортовых систем авиационного вооружения с помощью универсального имитатора авиационных средств поражения
Электромагнитный клапан
Струйный датчик уровня
Система автоматического управления самолетом при наборе и стабилизации заданной высоты полета
Клапан обратный
Сливной кран
Система автоматического управления боковым движением самолета при заходе на посадку
Способ определения чувствительности опухоли легкого к терапии ингибиторами тирозинкиназ
Способ вертебропластики
Устройство обнаружения факта наведения самонаводящегося по радиоизлучению оружия на радиоэлектронное средство, защищенное отвлекающим устройством
Комплексная система управления траекторией летательного аппарата при заходе на посадку
Электромеханический мини-привод поступательного действия
Модульный молекулярный конъюгат для направленной доставки генетических конструкций и способ его получения
Система автоматического управления самолетом при заходе на посадку
Молекулярные конъюгаты с поликатионным участком и лигандом для доставки в клетку и ядро клетки днк и рнк
Способ вертебропластики
Система автоматического управления самолетом при снижении

