Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ ВЕРТИКАЛЬНЫХ, ПРОДОЛЬНЫХ И БОКОВЫХ СИЛ, ДЕЙСТВУЮЩИХ НА БОКОВУЮ РАМУ ТЕЛЕЖКИ ОТ БУКСОВОГО УЗЛА ПРИ ДВИЖЕНИИ ВАГОНА, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области технической диагностики и может быть использовано в сфере железнодорожного транспорта, а именно для измерения и регистрации вертикальных, продольных и боковых сил, действующих на боковую раму тележки от колесной пары.
Известен способ измерения вертикальных сил (Ушкалов В.Ф. К вопросу о влиянии продольных усилий, действующих на боковую раму тележки грузового вагона, на показатели его вертикальной динамики / В.Ф. Ушкалов, Ю.С. Ромен, А.В. Заверталюк, В.И. Рубан // Наука и прогресс транспорта. Вестник Днепропетровского национального университета железнодорожного транспорта. - 2005. - №8. - С. 112-114), включающий в себя установку двух тензорезисторов (активного и компенсационного) на верхнюю наружную часть верхнего пояса боковой рамы, в надбуксовой зоне, в сечении вертикальной внутренней челюстной направляющей. При этом тензорезисторы устанавливаются Т-образно по отношению друг к другу или в виде креста. Активный тензорезистор устанавливается вдоль направления движения, а компенсационный - поперек.
Известен способ измерения вертикальных сил (ГОСТ 33788-2016. Вагоны грузовые и пассажирские. Методы испытаний на прочность и динамические качества), включающий в себя установку двух активных тензорезисторов на поверхности радиуса образованного зоной перехода от верхнего пояса к наклонному поясу боковой рамы, и двух компенсационных тензорезисторов.
Общим недостатком известных способов является погрешность при определении вертикальных сил, связанная с влиянием продольных и боковых сил, действующих на боковую раму тележки со стороны буксы при движении в кривых участках пути и при изменении скорости движения.
Известен способ измерения вертикальных сил (Ушкалов В.Ф. К вопросу о влиянии продольных усилий, действующих на боковую раму тележки грузового вагона, на показатели его вертикальной динамики /В.Ф. Ушкалов, Ю.С. Ромен, А.В. Заверталюк, В.И. Рубан // Наука и прогресс транспорта. Вестник Днепропетровского национального университета железнодорожного транспорта. - 2005. - №8. - С. 112 - 114), включающий в себя установку восьми тензорезисторов. При этом первые четыре тензорезистора устанавливаются на верхнюю и нижнюю наружные части верхнего пояса боковой рамы, в надбуксовой зоне, в сечении вертикальной внутренней челюстной направляющей. Оставшиеся четыре тензорезистора устанавливаются на верхнюю и нижнюю наружные части верхнего пояса боковой рамы, на расстоянии 575 мм от средней поперечной плоскости симметрии боковой рамы.
Недостатком указанного способа является погрешность при определении вертикальных сил, связанная с влиянием продольных сил, действующих на боковую раму тележки со стороны буксы при движении в кривых участках пути и при изменении скорости движения.
Известен способ измерения вертикальных сил (Манашкин Л.А. Об измерении вертикальных сил в тележках грузовых вагонов / Л.А. Манашкин, С.В. Мямлин, Е.А. Письменный // Наука и прогресс транспорта. Вестник Днепропетровского национального университета железнодорожного транспорта. 2004. №5. - С. 132 - 135), принятый в качестве прототипа, включающий в себя установку трех тензорезисторов. Один активный тензорезистор устанавливается на верхнюю наружную часть верхнего пояса боковой рамы, в надбуксовой зоне, в сечении вертикальной внутренней челюстной направляющей. Два компенсационных тензорезистора устанавливаются на боковых поверхностях зоны перехода от верхнего пояса к наклонному поясу в том же сечении, что и первый тензорезистор.
Недостатком указанного способа является погрешность при определении вертикальных сил, связанная с влиянием боковых сил, действующих на боковую раму тележки со стороны буксы при движении в кривых участках пути, и отсутствие возможности определить численные значения продольной силы.
Решаемой технической проблемой является отсутствие достоверных способов измерений вертикальных, продольных и боковых сил, действующих на боковую раму тележки от колесной пары при движении вагона.
Заявленные способ и устройство направлены на реализацию возможности измерения вертикальных, продольных и боковых сил, передающихся от колеса на боковую раму тележки при движении железнодорожных вагонов.
Технический результат заключается в повышении точности измерений вертикальных, продольных и боковых сил, передающихся на боковую раму тележки от колесной пары, и повышении безопасности движения вагонов путем улучшения качества диагностирования.
Указанный технический результат достигается тем, что на верхней части боковой рамы в зоне между челюстными направляющими, ограничивающими перемещения колесной пары, устанавливаются не менее четырех тензорезисторов таким образом, чтобы схема подключения тензорезисторов позволяла получать не менее четырех выходных сигналов.
При диагностировании вагонов, после математического преобразования значений выходных сигналов тензорезисторов, судят о величине вертикальных, продольных и боковых сил, действующих на боковую раму тележки от колесной пары.
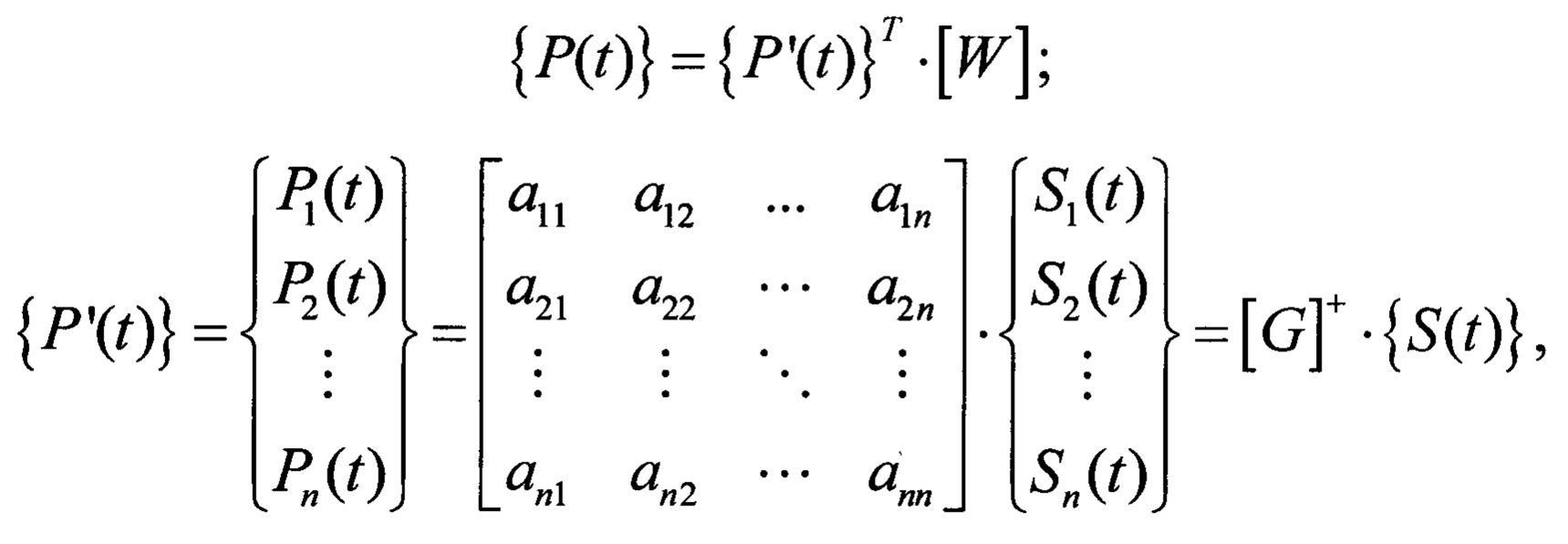
Величину вертикальной, продольной и боковой силы для любого момента времени определяют по общей формуле через суммирование произведений постоянных коэффициентов, входящих в состав псевдообратной матрицы к матрице влияния, составленной при проведении градуировочных нагружений, на значения выходных сигналов от установленных тензорезисторов
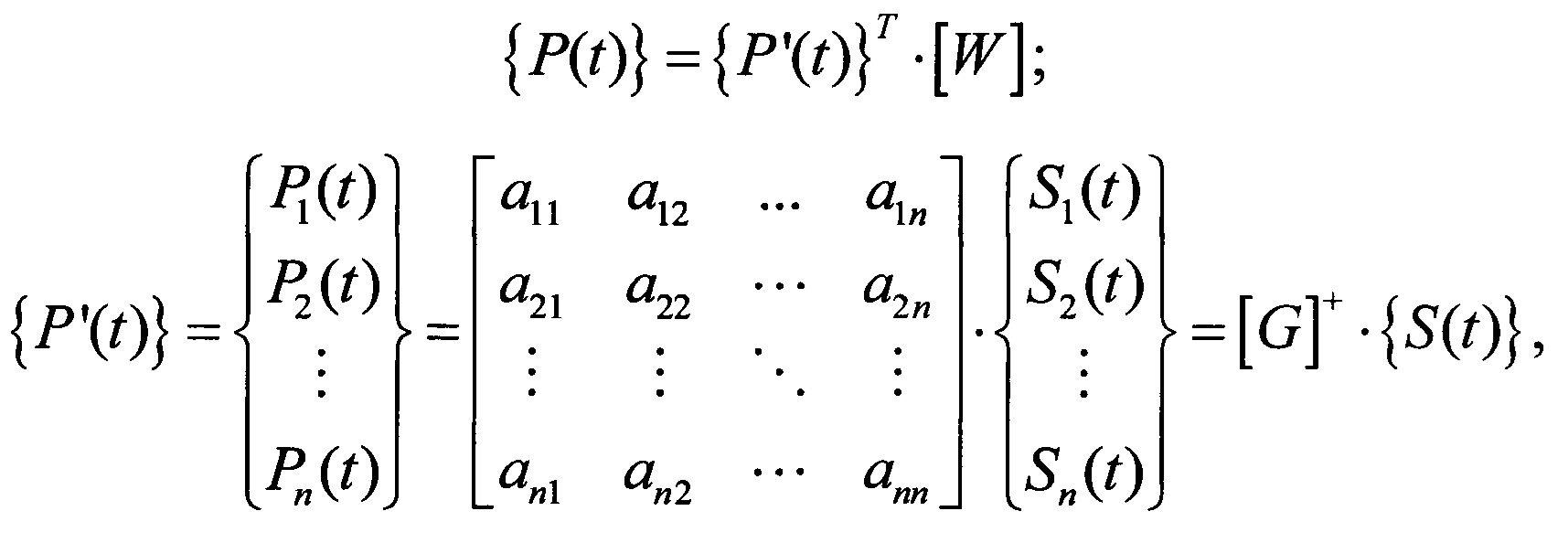
где P(t) - вертикальная, продольная или боковая силы, действующие на боковую раму тележки от колесной пары, определяемые в заданный момент времени; P'(t) - вектор регистрируемых усилий в боковой раме тележки; P'(t)T - транспонированный вектор регистрируемых усилий в боковой раме тележки; [W] - матрица суммирования, позволяющая просуммировать некоторых восстановленных при диагностировании сил для определения их фактического значения; а11…аnn - постоянные коэффициенты, входящие в состав псевдообратной матрицы [G]+ к матрице влияния, составленной при проведении градуировочных нагружений; S1(t)…Sn(t) - выходные сигналы от установленных тензорезисторов в заданный момент времени; n - количество выходных сигналов, получаемых от установленных тензорезисторов.
Сущность заявляемого изобретения поясняются графическим материалом.
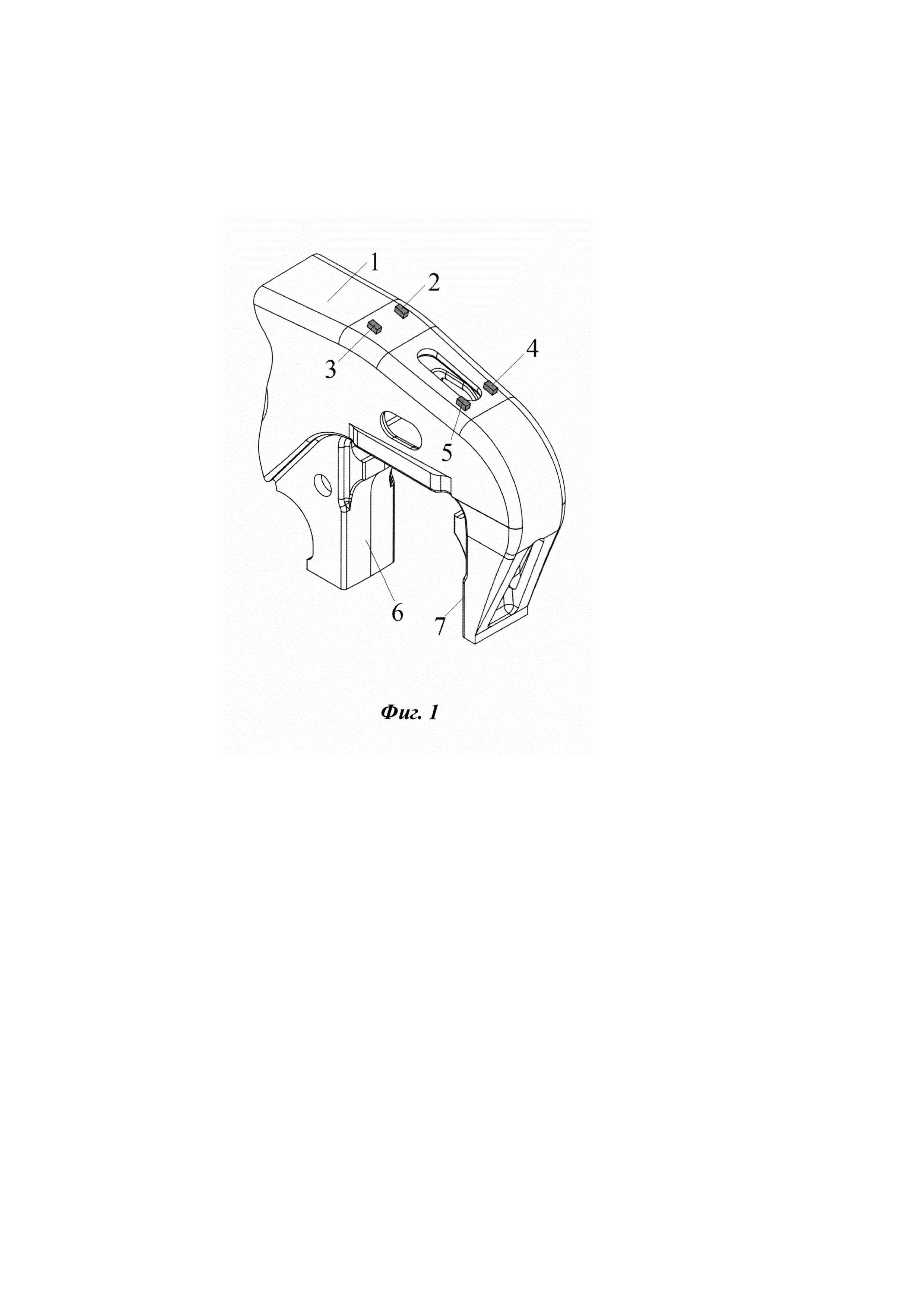
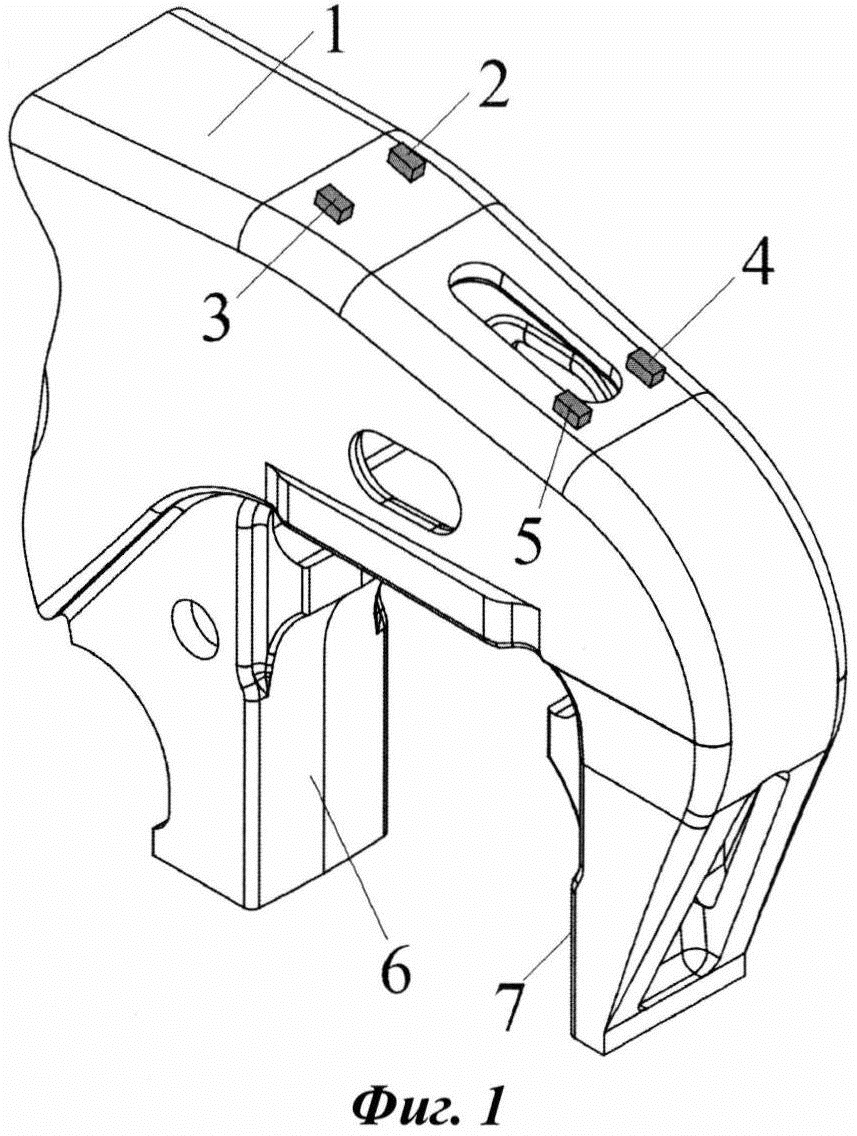
На фигуре 1 показан вид буксовой зоны боковой рамы тележки грузового вагона с установленными тензорезисторами.
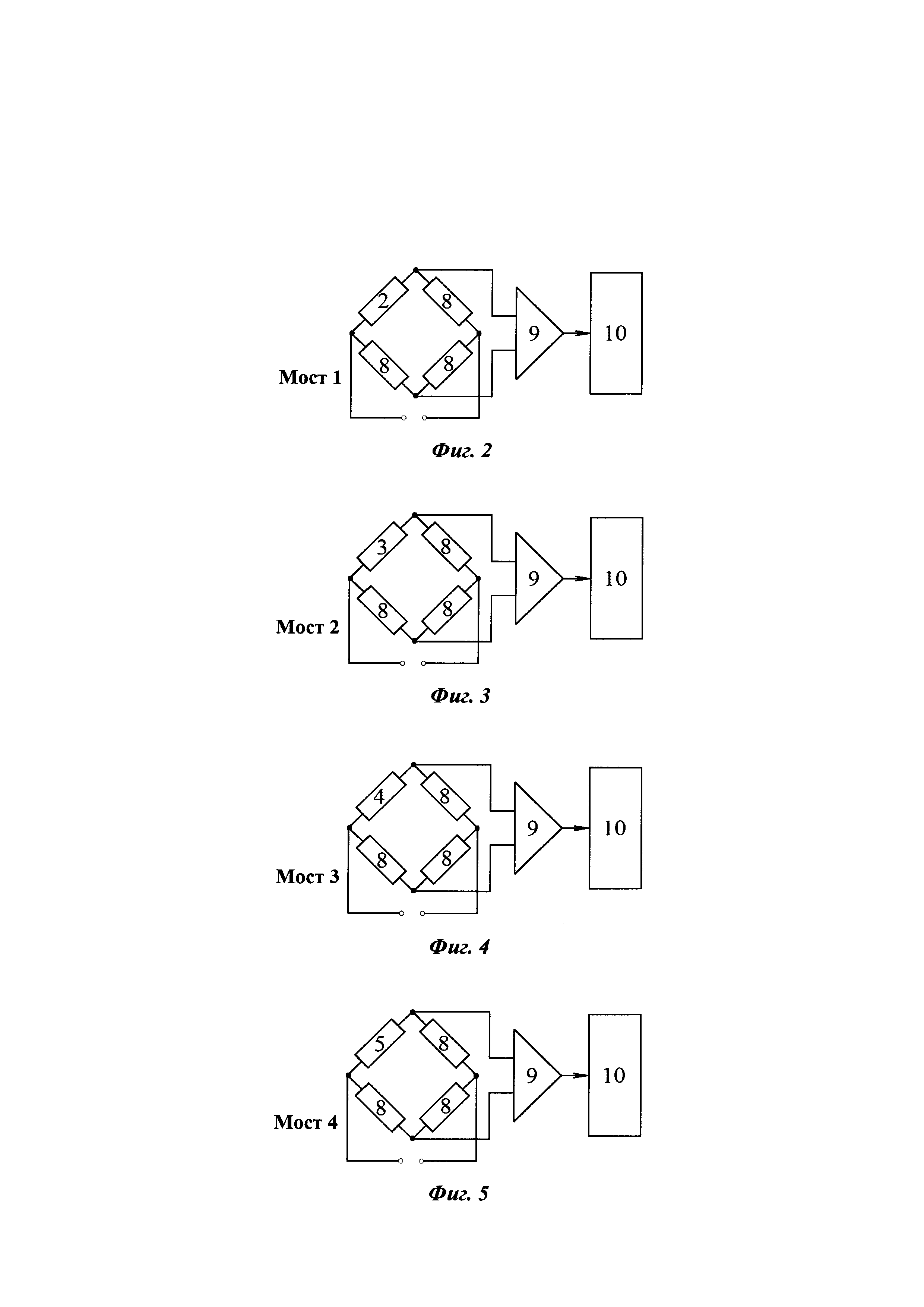
На фигуре 2 показана схема соединения тензорезисторов в измерительный мост.
На фигуре 3 показана схема соединения тензорезисторов в измерительный мост.
На фигуре 4 показана схема соединения тензорезисторов в измерительный мост.
На фигуре 5 показана схема соединения тензорезисторов в измерительный мост.
Способ измерения вертикальных, продольных и боковых сил, действующих на боковую раму тележки от колесной пары при движении вагона заключается в том, что на боковую раму 1 (фиг. 1) тележки (на фиг. не показана) устанавливают по крайней мере четыре тензорезистора 2, 3, 4, 5 на верхней наружной части верхнего пояса боковой рамы 1, в надбуксовой зоне, при этом два тензорезистора 2 и 3 располагают в сечении вертикальной внутренней челюстной направляющей 6, два других тензорезистора 4 и 5 располагают в сечении вертикальной наружной челюстной направляющей 7. При этом тензорезисторы 2, 3, 4, 5 соединяют в четыре измерительных моста и каждый измерительный мост содержит по одному рабочему тензорезистору 2 (фиг. 2), 3 (фиг. 3), 4 (фиг. 4) или 5 (фиг. 5) и по три компенсационных тензорезистора 8, которые через тензоусилители 9 подключены к регистрирующим устройствам 10, что позволяет получать не менее четырех выходных сигналов.
На следующем шаге проводятся градуировочные нагружения с составлением матрицы [G] влияния. Количество градуировочных нагружений зависит от количества выходных сигналов.
В случае использования четырех выходных сигналов от установленных тензорезисторов для составления матрицы [G] влияния осуществляется четыре отдельных градуировочных нагружения со следующими комбинациями действующих сил:
1. Вертикальная сила Рв;
2. Одновременное действие вертикальной силы Рв и продольной силы Рпр;
3. Одновременное действие вертикальной силы Рв, продольной силы Рпр и боковой силы Рб;
4. Одновременное действие вертикальной силы Рв и боковой силы Рб.
В результате градуировочных нагружений по выходным сигналам S11…S44 установленных тензорезисторов определяются коэффициенты g11…g44 матрицы [G] влияния
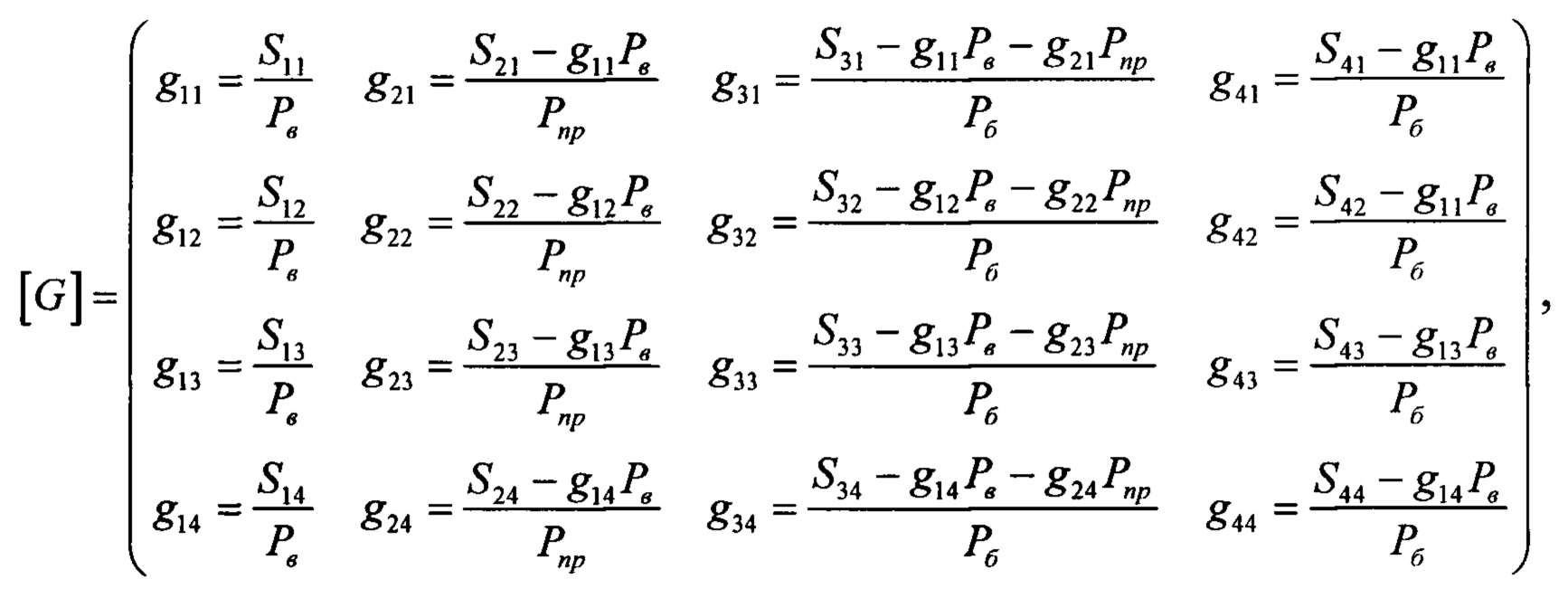
где S11…S14 - выходные сигналы тензорезисторов при нагружений боковой рамы тележки вертикальной силой Рв; S21…S24 - выходные сигналы тензорезисторов при одновременном нагружений боковой рамы вертикальной силой Рв и продольной силой Рпр; S31…S34 - выходные сигналы тензорезисторов при одновременном нагружений боковой рамы вертикальной силой Рв, продольной силой Рпр и боковой силой Рб; S41…S44 - выходные сигналы тензорезисторов при одновременном нагружений боковой рамы вертикальной силой Рв и боковой силой Рб.
Далее вычисляется псевдообратная матрица по отношению к известной матрице [G] влияния

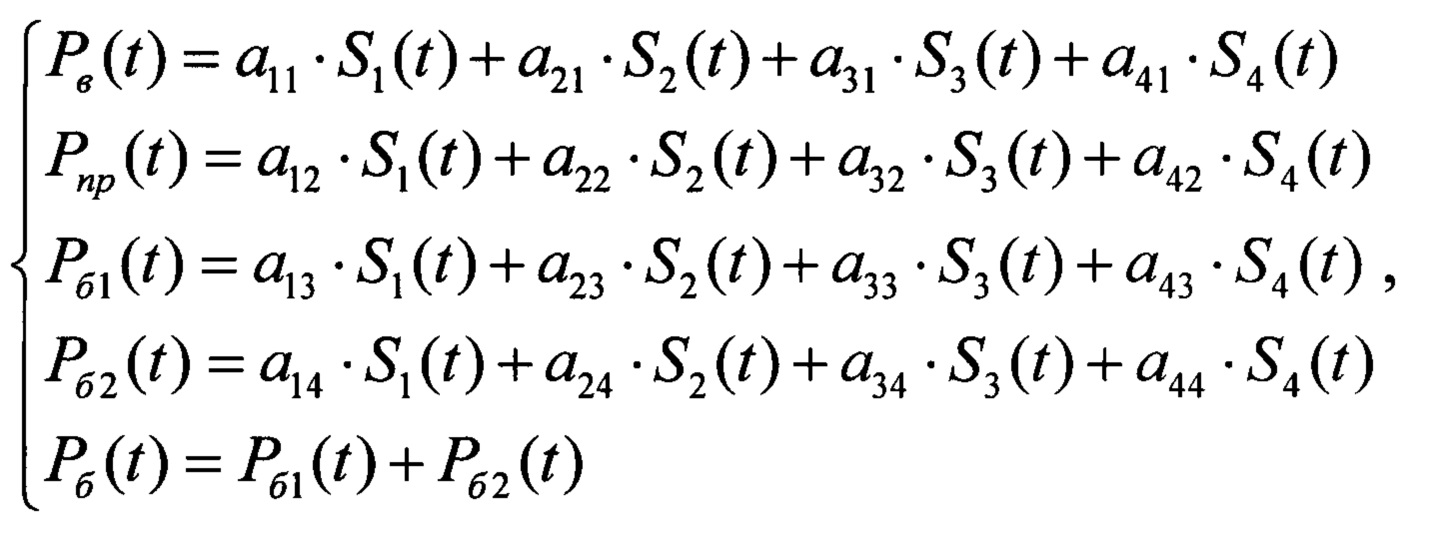
Таким образом, постоянные коэффициенты а11…а44, входящие в состав псевдообратной матрицы [G]+, используются при восстановлении значений сил, действующих на боковую раму тележки от колесной пары, при проведении диагностирования вагона во время движения. Восстановление значений вертикальной силы Рв(t), продольной силы Рпр(t) и боковой силы Рб(t) по поступающим сигналам тензорезисторов осуществляется по следующим математическим формулам
или в матричном виде
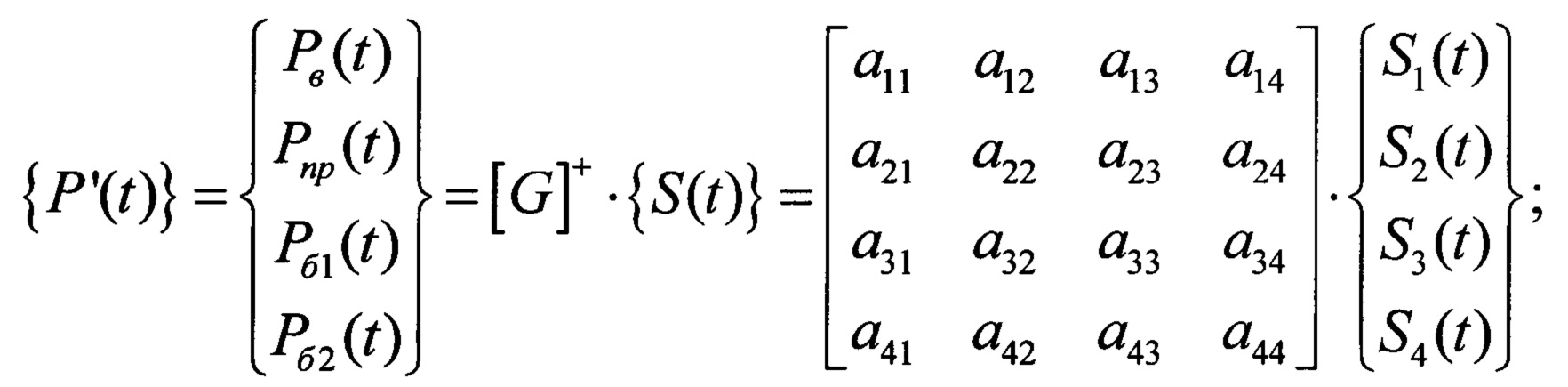
где Рв(t) - вертикальная сила, действующая на боковую раму тележки от колесной пары в требуемый момент времени; Рпр(t) - продольная сила, действующая на боковую раму тележки от колесной пары в требуемый момент времени; Рб(t) - боковая сила, действующая на боковую раму тележки от колесной пары в требуемый момент времени; Рб1(t) - боковая сила, возникающая при одновременном вертикальном и продольном нагружений; Рб2(t) - боковая сила, возникающая при одновременном вертикальном нагружений; а11…а44 - постоянные коэффициенты, входящие в состав псевдообратной матрицы [G]+; S1(t), S2(t), S3(t), S4(t) - выходные сигналы тензорезисторов в требуемый момент времени; P'(t) - вектор регистрируемых усилий в боковой раме тележки; P'(t)T - транспонированный вектор регистрируемых усилий в боковой раме тележки; [W] - матрица суммирования, позволяющая просуммировать некоторых восстановленных при диагностировании сил для определения их фактического значения.
Устройство для измерения вертикальных, продольных и боковых сил, действующих на боковую раму тележки от колесной пары при движении вагона, содержит боковую раму 1 (фиг. 1) тележки (на фиг. не показана), по крайней мере четыре тензорезистора 2, 3, 4 и 5, установленные на верхней части боковой рамы в зоне между челюстными направляющими 6 и 7, ограничивающими перемещения колесной пары. Для получения не менее четырех выходных сигналов тензорезисторы 2, 3, 4 и 5 подключаются в четыре измерительных моста и каждый мост содержит по одному рабочему тензорезистору 2 (фиг. 2), 3 (фиг. 3), 4 (фиг. 4) или 5 (фиг. 5) и по три компенсационных тензорезистора 8, связанные с усилителями 9 и регистрирующими устройствами 10.
В случае использования более четырех выходных сигналов от установленных тензорезисторов, количество комбинаций действующих сил при градуировочных нагружениях должно соответствовать количеству этих выходных сигналов, так как псевдообратная матрица может существовать только по отношению к квадратной матрице.
Таким образом достигается технический результат, заключающийся в повышении точности измерений вертикальных, продольных и боковых сил, передающихся на боковую раму тележки от колесной пары, и повышении безопасности движения вагонов путем улучшения качества их диагностирования.
Трехосная тележка
Балансир трехосной тележки
Система дистанционного мониторинга железнодорожного транспортного средства
Способ автоматического крепления контейнеров от опрокидывания на раме вагона-платформы и устройство для его осуществления
Система мониторинга состояния подвижной единицы железнодорожного состава
Устройство сбора информации и способ оценки результатов взаимодействия между колесом и рельсом
Тормозная рычажная передача тележки железнодорожного грузового вагона
Способы проведения испытаний вагонов и испытательный комплекс для их осуществления
Способ измерений вертикальной нагрузки от колеса на рельс и устройство для его осуществления
Способ измерения боковых сил, действующих от колеса на рельс, и устройство для его осуществления
Механизм запирания дверей крытого вагона
Трехосная тележка
Балансир трехосной тележки
Система дистанционного мониторинга железнодорожного транспортного средства
Способ автоматического крепления контейнеров от опрокидывания на раме вагона-платформы и устройство для его осуществления
Система мониторинга состояния подвижной единицы железнодорожного состава
Тележка двухосная для грузовых вагонов
Способы проведения испытаний вагонов и испытательный комплекс для их осуществления
Устройство и способ обнаружения дефектов колес железнодорожных транспортных средств в движении
Способ измерений вертикальной нагрузки от колеса на рельс и устройство для его осуществления

