Результат интеллектуальной деятельности: СПОСОБ, УСТРОЙСТВО И ЖЕЛЕЗНОДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО, В ЧАСТНОСТИ РЕЛЬСОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО, ДЛЯ РАСПОЗНАВАНИЯ ПРЕПЯТСТВИЙ В ЖЕЛЕЗНОДОРОЖНОМ СООБЩЕНИИ, В ЧАСТНОСТИ В РЕЛЬСОВОМ СООБЩЕНИИ
Вид РИД
Изобретение
Изобретение касается способа распознавания препятствий в железнодорожном сообщении, в частности в рельсовом сообщении, согласно ограничительной части п.1 формулы изобретения, устройства для распознавания препятствий в железнодорожном сообщении, в частности в рельсовом сообщении, согласно ограничительной части п.10 формулы изобретения и железнодорожного транспортного средства для распознавания препятствий в железнодорожном сообщении, в частности рельсового транспортного средства для распознавания препятствий в рельсовом сообщении, согласно ограничительной части п.24 формулы изобретения.
Железнодорожные транспортные средства, как составная часть современной транспортной инфраструктуры, представляют собой колейные средства сообщения и транспорта, которые передвигаются, например, катясь по или под одним или двумя направляющими рельсами (рельсовыми путями), паря над или под магнитным полем или вися на стальных тросах. Из названных колейных средств сообщения и транспорта наиболее широко распространены рельсовые транспортные средства, которые базируются на колесно-рельсовой системе, которые либо (имеют) собственный привод ходовой части (моторвагон), либо тянутся или перемещаются локомотивом, и у которых преимущественно стальные колеса, имеющие гребень бандажа, направляются по двум стальным рельсам или, соответственно, рельсовым путям.
Лежащая в основе изобретения задача заключается в том, чтобы предложить способ, устройство и железнодорожное транспортное средство, в частности рельсовое транспортное средство, для автоматического распознавания препятствий в железнодорожном сообщении, в частности в рельсовом сообщении, с помощью которого автоматически распознаются препятствия в железнодорожном сообщении, когда железнодорожные транспортные средства находятся в пути на железнодорожных перегонах в железнодорожной сети, или, соответственно, препятствия в рельсовом сообщении, когда рельсовые транспортные средства находятся в пути на рельсовых перегонах в рельсовой сети.
Автоматическое распознавание препятствий в железнодорожном сообщении, в частности в рельсовом сообщении, что является предметом настоящей международной заявки на патент (заявка № PCT/…; публикация № WO…) и обосновывающей ее приоритет заявки на патент DE (заявка №102016224344.6), с учетом будущего автоматизированного (автономного) или с участием машиниста ведения железнодорожных транспортных средств в железнодорожном сообщении или, соответственно, рельсовых транспортных средств в рельсовом сообщении является безусловной необходимостью.
Так, для автоматизированного или с участием машиниста ведения железнодорожных/рельсовых транспортных средств необходимо распознавать движущиеся или стационарные объекты и людей в области колеи/рельсового пути. Одновременно необходимо отличать допустимые объекты и людей (напр., путевой упор на колее/рельсовом пути, рабочий, выполняющий техническое обслуживание, рядом с колеей/рельсовым путем) от недопустимых объектов и людей (напр., вырванное с корнем дерево или играющие дети).
Проблема автоматизированного или с участием машиниста ведения до сих пор реализовывалась с помощью затратных дополнительных инвестиций в инфраструктуру перегона, такую как индукционные петли, компьютеры вдоль перегона и системы связи между поездом и компонентами перегона. Кроме того, применяются специальные защитные заборы во избежание доступа к рельсовому пути (напр., известные по аэропортам).
Но не только аспект автоматического распознавания препятствий имеет значение для будущего автоматизированного (автономного) или с участием машиниста ведения, но и последующие технические аспекты, все, которые в большей или меньшей степени находятся в техническом контексте с настоящей заявкой на патент и поэтому приведены, и в связи с этим их содержания должны учитываться и при необходимости даже включаться в нее.
Речь идет о следующих аспектах:
1) Автоматизированное распознавание сигналов в железнодорожном/рельсовом сообщении в соответствии с международной заявкой на патент (заявка №PCT/EP2016/057804; публикация №WO 2017/174155 A1) и раскрытой в ней технической теорией.
2) Автоматическое распознавание опасных ситуаций в железнодорожном/рельсовом сообщении в соответствии с заявкой на патент DE (заявка №102016224358.6) и международной заявкой на патент (заявка № PCT/…; публикация № WO …) и раскрытой в каждой из них технической теорией.
3) Автоматическое распознавание колей/рельсовых путей в железнодорожном/рельсовом сообщении в соответствии с заявкой на патент DE (заявка №102016224335.7) и международной заявкой на патент (заявка № PCT/…; публикация № WO …) и раскрытой в каждой из них технической теорией.
4) Альтернативное определение положений в рельсовом сообщении, когда традиционное определение положений со спутниковой поддержкой не срабатывает или является недостаточным, в соответствии с заявкой на патент DE (заявка №102016224355.1) и международной заявкой на патент (заявка № PCT/…; публикация № WO …) и раскрытой в каждой из них технической теорией.
5) Выполнение анализа изображений на базе колеи/рельсового пути в железнодорожном/рельсовом сообщении в соответствии с заявкой на патент DE (заявка №102016224331.4) и международной заявкой на патент (заявка № PCT/…; публикация № WO …) и раскрытой в каждой из них технической теорией.
Вышеназванная контекстовая задача решается, исходя из определенного в ограничительной части п.1 формулы изобретения способа распознавания препятствий с помощью признаков, указанных в отличительной части п.1 формулы изобретения.
Помимо этого, вышеназванная контекстовая задача решается, исходя из определенного в ограничительной части п.8 формулы изобретения устройства для распознавания препятствий с помощью признаков, указанных в отличительной части п.8 формулы изобретения.
Далее вышеназванная контекстовая задача решается, исходя из определенного в ограничительной части п.20 формулы изобретения железнодорожного транспортного средства, в частности рельсового транспортного средства, с помощью признаков, указанных в отличительной части п.20 формулы изобретения.
Идея, лежащая в основе изобретения по независимым пп.1, 8 и 20 формулы изобретения, заключается в том, чтобы на базе нескольких изображений некоторой расположенной перед железнодорожным транспортным средством области перегона следования в некоторой маркированной на каждом из изображений области изображения, которая по существу показывает используемую железнодорожным транспортным средством колею, путем анализа изображений распознавать графически позиционированную маркировкой колею и согласовывать с сохраненной в памяти известной графической метаинформацией или с сохраненной в памяти известной графической метаинформацией и дополнительной информацией, и методом распознавания объектов распознавать на некотором фрагменте маркированной области изображения, находится ли на колее какой-либо объект, такой как, напр., человек, животное, упавшее дерево и пр., при этом на области изображения, предпочтительно в фрагменте области изображения маркируется препятствие, когда методом распознавания объектов распознается объект. При этом графическая метаинформация в буквальном смысле содержит данные признаков и свойств зарегистрированных изображений области перегона следования.
При этом основным принципом изобретения является использовать метаданные о перегоне, напр., ходе перегона, в комбинации с сенсорикой в железнодорожном транспортном средстве, а также алгоритмы расчета и аналитической оценки, чтобы улучшить распознавание объектов и людей и позволить отличать допустимые и недопустимые объекты и людей.
При этом целью является сделать возможным вклад в полностью автоматизированное ведение без дополнительных инвестиций в инфраструктуру перегона.
Для распознавания объектов и людей на колее/рельсовом пути или в некоторой критической области рядом с колеей/рельсовым путем алгоритмы распознавания образцов или алгоритмы сравнения образцов (так называемые алгоритмы согласования паттернов) применяются паушально для области перегона следования, область «перед транспортным средством» (в направлении следования).
1. Для распознавания объектов или людей на рельсовом пути на большом удалении эти алгоритмы работают неэффективно, потому что релевантной является только малая часть изображения.
2. Эти алгоритмы не способны отличать допустимые объекты и людей от недопустимых объектов и людей.
В автомобильной области с фокусировкой на дорогах в соответствии с US 6,405,128 B1 известна аналитическая оценка так называемого «электронного горизонта».
Автоматизированное распознавание объектов и колей/рельсовых путей, а также отличие надежных и ненадежных объектов/людей может предпочтительным образом по меньшей мере частично достигаться с помощью следующих шагов:
A. В первом шаге в железнодорожном транспортном средстве используются несколько приборов для записи изображений (напр., сенсоров) различного вида (напр., видеокамера, лазерные сенсоры, инфракрасная камера, тепловая камеры для съемки изображений, радарные устройства, другие приборы для сбора изображений и пр.) для создания изображений или другой информации о железнодорожном/рельсовом перегоне перед железнодорожным/рельсовым транспортным средством.
Так, например, радар для распознавания металлических объектов, даже при плохой погоде, может комбинироваться с видеокамерами и приборами для сбора изображений, такими как тепловые камеры для съемки изображений для распознавания людей.
B. Во втором шаге на каждом изображении маркируется текущий рельсовый путь следования путем анализа изображений при помощи внешней метаинформации.
Вариант 1
На видеоизображении или подобном видео изображении это может осуществляться с помощью алгоритмов распознавания кромок, исходя из рельсов непосредственно перед транспортным средством. При применении дополнительной информации, такой как планы рельсов, картографический материал и т.п., это распознавание может выполняться более надежно. В этой связи ссылаемся на выполнение анализа изображений на базе колеи/рельсового пути в железнодорожном/рельсовом сообщении в соответствии с заявкой на патент DE (заявка №102016224331.4) и международной заявкой на патент (заявка № PCT/…; публикация № WO …) и раскрытой в каждой из них технической теорией.
Вариант 2
На изображении на базе радара это может осуществляться на базе знания перегона следования (ход колеи/рельсового пути относительно географического положения известен).
C. В третьем шаге при фокусировке на колее следования/рельсовом пути следования для каждого применяемого прибора для записи изображений (напр., прибор для сбора изображений) методами распознавания объектов распознается, находится ли на колее/рельсовом пути какой-либо объект или человек. Это означает, что рассматривается только фрагмент изображения, содержащий колею следования/рельсовый путь следования, и критическая область слева и справа от него. При этом в зависимости от прибора для сбора изображений, применяются один или оба нижеследующих способов согласования паттернов.
И здесь качество распознавания повышается путем интеграции внешней информации или дополнительной информации.
C1. Положительное согласование
Проверяется, находятся ли в релевантном фрагменте изображения паттерны, которые (относятся) к людям или объектам, таким как упавшие деревья или обгоняющие железнодорожные транспортные средства, напр., рельсовые транспортные средства, поезда. Если да, маркируется препятствие или потенциальное препятствие.
C2. Отрицательное согласование
Проверяется, распознается ли ожидаемый паттерн, такой как, напр., от сплошного рельсового пути или от закономерных рельсовых балок, на изображении или, соответственно, изображениях. Если это не так, то с помощью банка данных изображений проверяется, ожидалась ли это нарушение закономерности (эта информация может, напр., подготавливаться машинистом моторвагона при поездках с целью инициализации). В случае если нарушение закономерности не ожидалось, маркируется потенциальное препятствие.
D. В четвертом шаге объединяется результат маркировки препятствий от различных приборов сбора изображений. И здесь, например, при применении пробабилистических методов обработки изображений, таких как модели Хиддена-Маркова, комбинируются различные источники информации, чтобы минимизировать ложное распознавание и исключить «false negatives» (англ. ложные негативы), т.е. ложное предположение, что на колее/рельсовом пути не находится объект, хотя он реально имеется.
С помощью намеченного выше анализа изображений перегона перед железнодорожным транспортным средством может достигаться, что:
- объекты и люди в релевантной области колеи/рельсового пути распознаются более эффективно, чем до сих пор;
- имеется возможность отличать допустимые объекты и люди в области перед железнодорожным транспортным средством/рельсовым транспортным средством (но именно вне колеи следования или, соответственно, рельсового пути следования и некоторой критической области слева и справа от него) от недопустимых объектов и людей на колее следования, на рельсовом пути следования или в критической области слева и справа от него;
- объекты и люди при неблагоприятных условиях видимости могут распознаваться надежнее, чем машинистами моторвагона;
- машинисты моторвагона больше не нужны для распознавания препятствий, так что колея следования/рельсовый путь следования может распознаваться независимо от их наличия.
В ходе одного из предпочтительных усовершенствований изобретения применительно к устройству для распознавания препятствий по п.8 формулы изобретения могут также применяться следующие дополнительные компоненты a)-c) для прибора для записи изображений (напр., прибор для сбора изображений):
a. Корректирующий компонент по п.15 формулы изобретения, который приобщает данные о погоде и освещенности для аналитической оценки графического материала. При этом, например, при сильном тумане, аналитическая оценка видеоизображений может ограничиваться первыми 50 метрами перед железнодорожным транспортным средством или, соответственно, рельсовым транспортным средством, и соответственно дросселироваться скорость транспортного средства.
b. Компонент изменения фокусного расстояния по п.16 формулы изобретения, который, в зависимости от окружения (напр., вокзал, городская зона, сельская местность и пр.) и скорости выбирает правильный угол съемки, чтобы таким образом оптимально поддерживать аналитическую оценку изображения. Например, тогда могут надлежащим образом обслуживаться как ситуации съемки на свободном перегоне (требуют изображений из большой удаленности, чтобы на основании скорости можно быть реагировать своевременно), так и ситуации съемки в области вокзала (требуют изображений, имеющих большую ширину). Дополнительно при слиянии графических данных и данных перегона можно фокусироваться на особенно интересных областях, таких как, напр., железнодорожный переезд.
c. Компонент освещения по п.17 формулы изобретения, например, прожектор, который работает в пределах или вне видимой человеку области, с помощью которого улучшается качество графического материала, снимаемого прибором для записи изображений или, соответственно, прибором для сбора изображений ночью или при плохих погодных условиях.
d. Придорожная станция аналитической оценки, которая привязана посредством мобильной связи и принимает из устройства для запоминания изображений изображения, для которых аналитическая оценка возможна только с высоким коэффициентом неопределенности. Затем эти изображения могут аналитически оцениваться человеком-экспертом, и затем эта информация может снова возвращаться в устройство для запоминания изображений, которое может быть расположено (в) устройстве для распознавания препятствий в железнодорожном/рельсовом транспортном средстве (опция «А») или вне устройства для распознавания препятствий быть предназначено для него, напр., в виде банка памяти данных в железнодорожном/рельсовом транспортном средстве или, напр., в виде облака данных.
1. При достаточной ширине полосы связи и доступности людей-экспертов это может осуществляться даже в реальном времени таким образом, что результат аналитической оценки может использоваться для управления железнодорожным/рельсовым транспортным средством.
2. Помимо этого, с помощью придорожной станции аналитической оценки может согласовываться и распределяться графический материал рельсовых транспортных средств одной представительной выборки или нескольких представительных выборок.
e. Мобильный прибор машиниста поезда или сравнимого железнодорожного служащего, который с целью оформления пассажиров, так или иначе, ездит на рельсовом транспортном средстве и аналогично пункту d) оценивает изображения, имеющие высокий коэффициент неопределенности.
Помимо этого, возможно, чтобы устройство для распознавания препятствий было выполнено и функционировало в виде виртуальной машины как «Software Defined Signal Recognition of Rail Traffic Systems» (англ. программно-определяемое распознавание сигналов систем железнодорожного транспорта).
Другие преимущества изобретения вытекают из последующего описания одного из примеров осуществления изобретения с помощью фиг.1 и 2. На них показано:
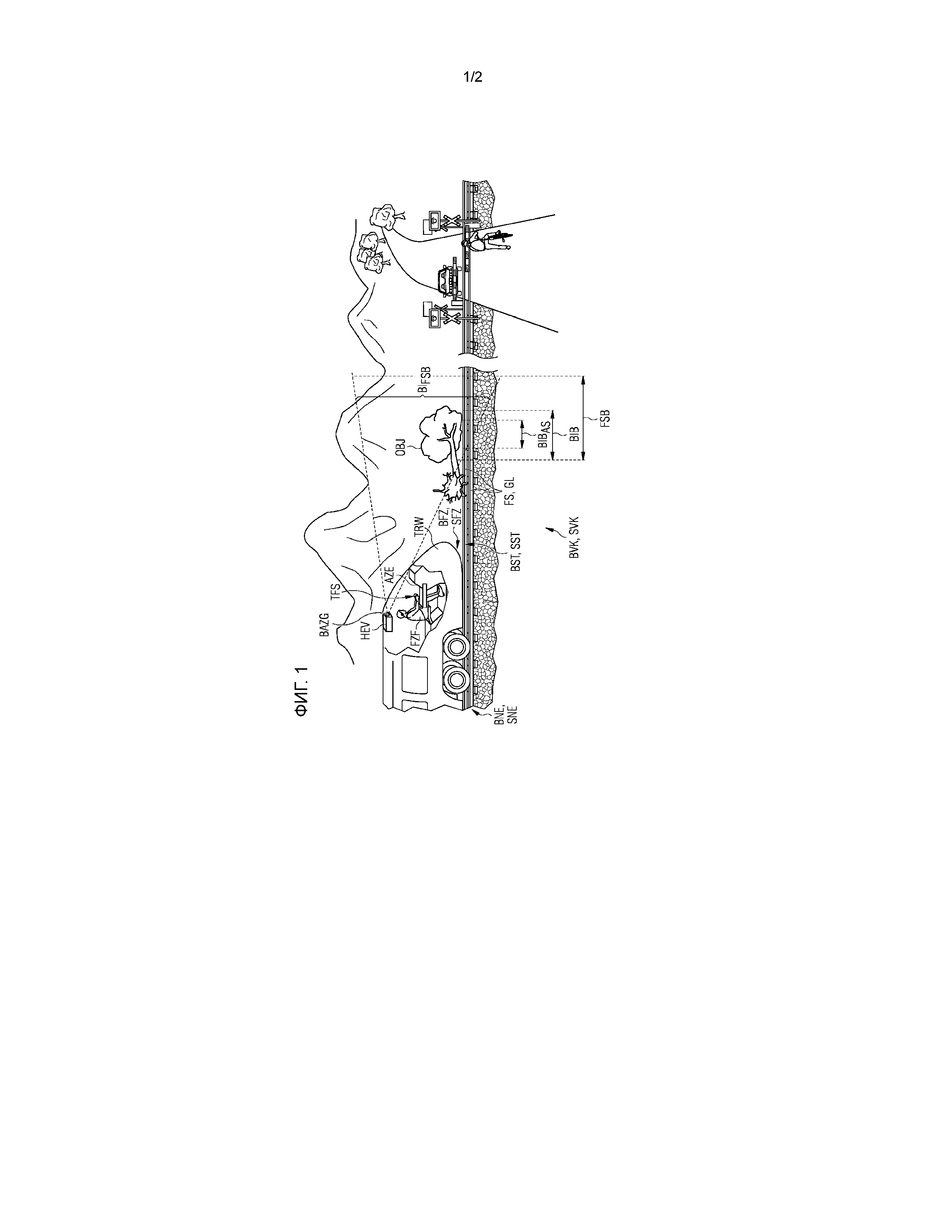
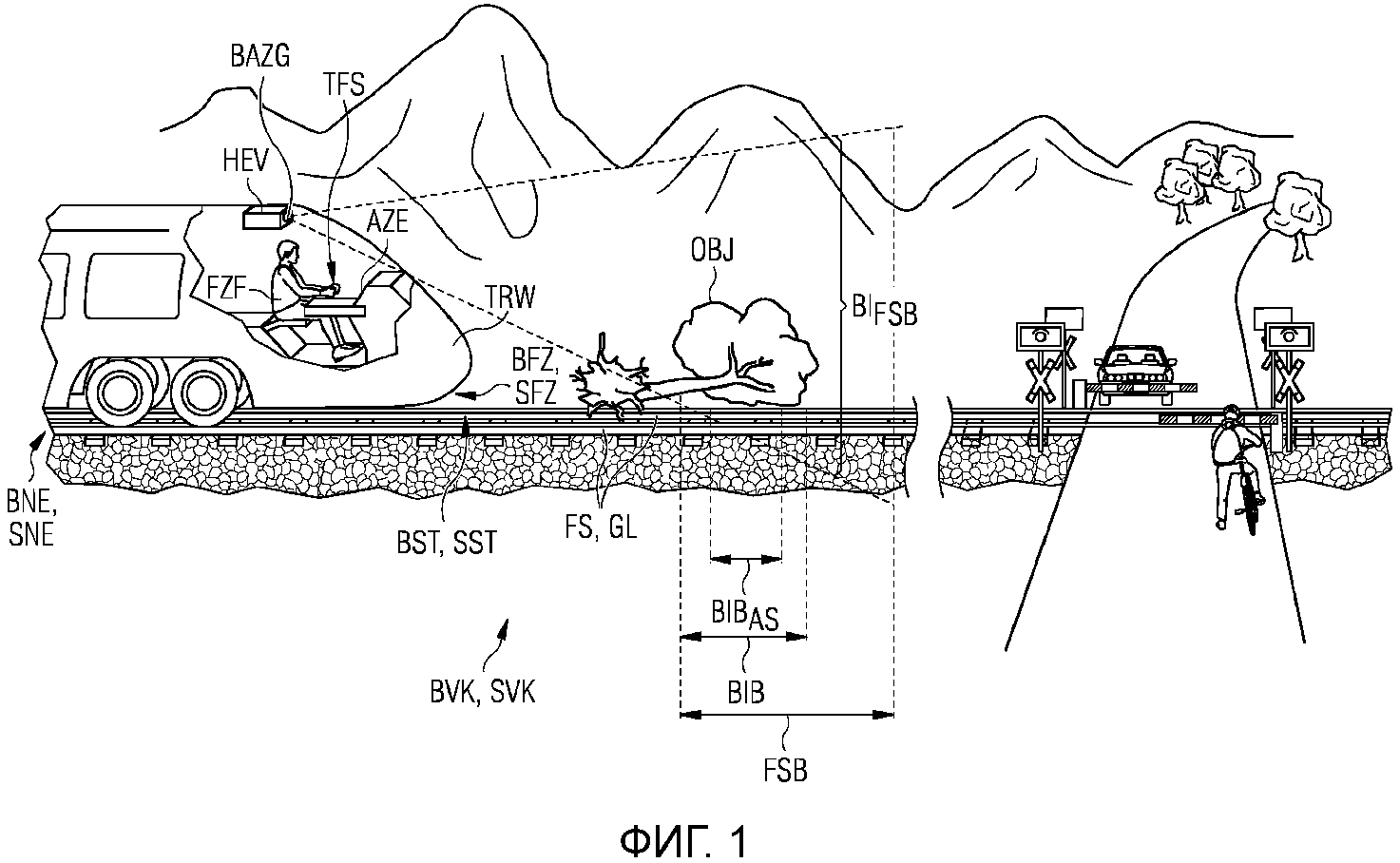
фиг.1: распознавание на базе железнодорожного транспортного средства препятствия в виде упавшего на железнодорожном перегоне дерева;
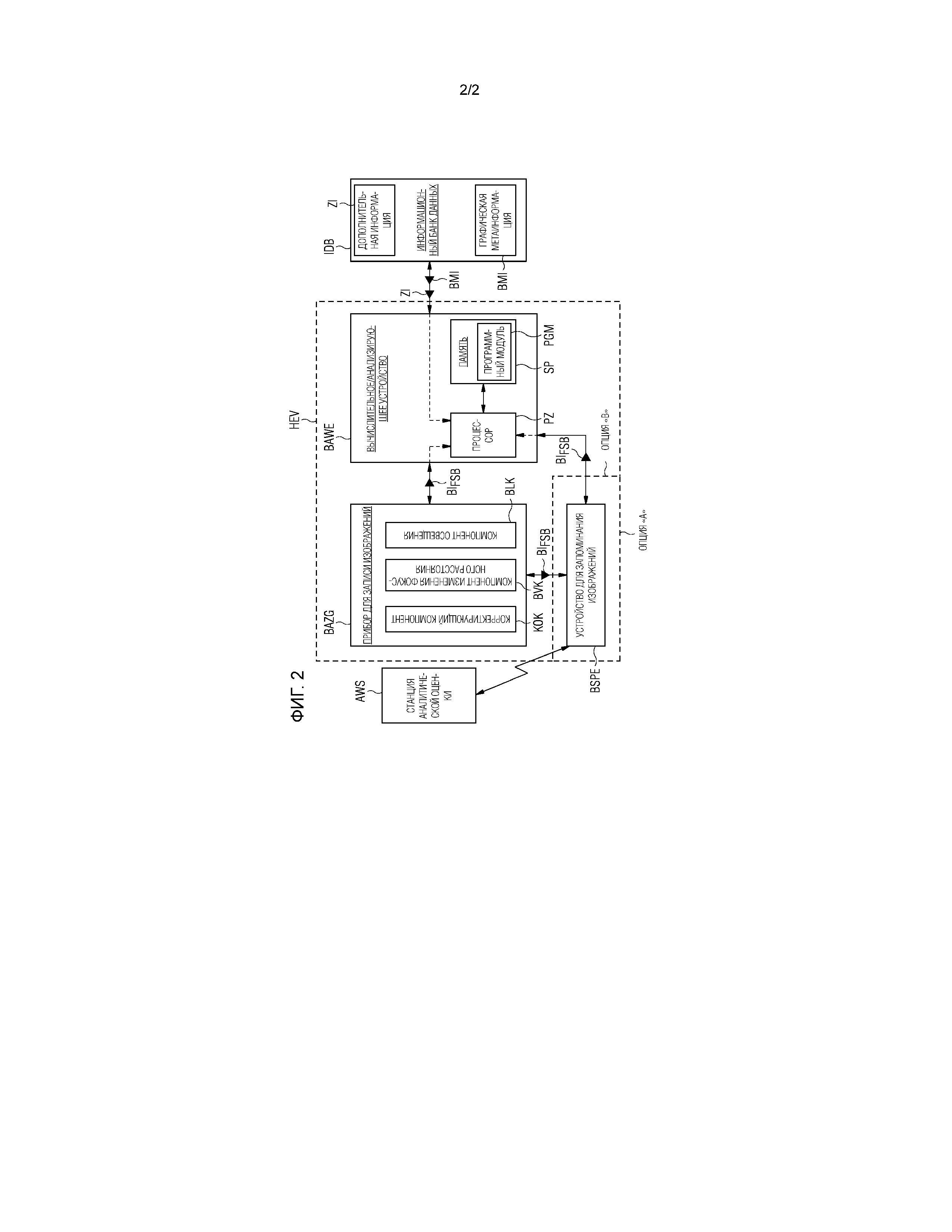
фиг.2: принципиальная конструкция устройства для распознавания препятствий для распознавания препятствий на базе железнодорожного транспортного в виде упавшего на железнодорожном перегоне дерева в соответствии с фиг.1 препятствия.
На фиг.1 показано распознавание на базе железнодорожного транспортного средства препятствия в железнодорожном сообщении BVK, когда на изображенном отдельными участками железнодорожном перегоне BST железнодорожной сети BNE железнодорожное транспортное средство BFZ приближается по колее FS железнодорожного перегона BST к находящемуся в виде препятствия на колее FS объекту OBJ, в изображенном случае упавшему на колею FS дереву.
По настоящему примеру осуществления отнесенный к колее железнодорожный перегон BST железнодорожной сети BNE представляет собой рельсовый перегон SST рельсовой сети SNE, на котором в рельсовом сообщении SVK для распознавания препятствий на базе рельсового транспортного средства рельсовое транспортное средство SFZ находится в пути на рельсовом пути GL и приближается к находящемуся в виде препятствия на рельсовом пути GL объекту OBJ, в изображенном случае упавшему на колею FS дереву. Вместо изображенного рельсового сообщения SVK с едущим по рельсовому перегону SST рельсовой сети SNE рельсовым транспортным средством SFZ, как уже рассматривалось, в качестве другого примера осуществления изобретения возможна и представима также любая другая, какая угодно система железнодорожного сообщения на базе ближнего или дальнего сообщения. Так, можно было бы вести речь также, напр., о системе сообщения подвесной дороги на магнитной подвеске (ключевое слово: Трансрапид, Маглев и пр.), имеющей соответственно сравнимую инфраструктуру, состоящую из железнодорожной сети, железнодорожного перегона и железнодорожного транспортного средства.
В изображенной на фиг.1 системе рельсового сообщения в моторвагоне TRW рельсового транспортного средства SFZ, имеющем пульт TFS машиниста моторвагона и интегрированное устройство AZE отображения, в котором находится рабочее место машиниста FZF транспортного средства, для распознавания на базе рельсового транспортного средства препятствия размещено устройство HEV для распознавания препятствий. Для этого устройство HEV для распознавания препятствий включает в себя предпочтительно выполненный в виде сенсора прибор BAZG для записи изображений, который выполнен, напр., в виде обычной видеокамеры, лазерного сенсора, тепловой камеры для съемки изображений, радарного устройства, инфракрасной камеры и пр., и в связи со сбором изображений называется также прибором для сбора изображений.
С помощью прибора BAZG для записи изображений, когда едущее по рельсовому пути GL рельсовое транспортное средство SFZ приближается к находящемуся на рельсовом пути GL в виде препятствия объекту OBJ, в изображенном случае упавшему дереву, с рельсового транспортного средства SFZ, напр., из перспективы машиниста FZF моторвагона на пульте TFS машиниста моторвагона TRW и/или из неподвижного, обеспечивающего видимость колеи положения в или на транспортном средстве SFZ, из расположенной перед рельсовым транспортным средством SFZ, при этом предпочтительно ориентирующейся на скорость рельсового транспортного средства SFZ области FSB перегона следования может регистрироваться множество изображений BIFSB, представляющих эту область FSB перегона следования.
На изображениях BIFSB области FSB перегона следования содержится область BIB изображения, имеющая фрагмент BIBAS области изображения, который представляет используемый рельсовый путь GL, а также некоторую критическую для рельсового сообщения SVK область, с помощью которой указывается критическая для рельсового сообщения SVK окрестность по существу слева и справа от рельсового пути GL в части области FSB перегона следования, показанной областью BIB изображений BIFSB области FSB перегона следования.
Т.е. область FSB перегона следования включает в себя также область, критическую для рельсового сообщения SVK.
Как теперь на основании изображений BIFSB области FSB перегона следования, имеющих содержащуюся в них область BIB изображения и фрагмент BIBAS области изображения, выполняется распознавание препятствий, поясняется ниже с помощью описания фиг.2.
На фиг.2 показана принципиальная конструкция устройства HEV для распознавания препятствий для распознавания в соответствии с фиг.1 на базе рельсового транспортного средства препятствий железнодорожного транспортного средства SFZ, которое находится в пути на рельсовом пути GL и приближается к находящемуся в виде препятствия на рельсовом пути GL объекту OBJ, в изображенном случае упавшему дереву.
При этом исходной точкой для распознавания препятствий в соответствии с рассуждениями к фиг.1, является прибор BAZG для записи изображений, который регистрирует изображения BIFSB области FSB перегона следования для распознавания препятствий.
Для этого прибор BAZG для записи изображений предпочтительно выполнен с возможностью поворота для ориентации на объект изображения.
Далее возможно и при определенных обстоятельствах также по техническим причинам, связанным с регистрацией, целесообразно, чтобы в устройстве HEV для распознавания препятствий содержались несколько приборов BAZG для записи изображений одинаковой конструкции, напр., несколько видеокамер, или приборов различной конструкции, напр., несколько видеокамер, лазерных сенсоров, сенсоров на базе радара, основанных на беспроводной локации и измерении расстояния, инфракрасных камер и/или тепловых камер для съемки изображений, которые снимают изображения BIFSB. Такое многократное осуществление записи изображений или, соответственно, сбора изображений может быть релевантно, в т.ч. для целей редундантности.
Для дополнительного улучшения качества изображений, записываемых или собираемых с помощью прибора BAZG для записи изображений, в приборе BAZG для записи изображений предпочтительно содержатся следующие компоненты:
1. Корректирующий компонент KOK, с помощью которого для аналитической оценки графического материала приобщаются данные о погоде и освещенности. С помощью этого компонента можно, напр., при сильном тумане, ограничивать аналитическую оценку видеоизображений первыми 50 метрами перед рельсовым транспортным средством и соответственно дросселировать скорость рельсового транспортного средства.
2. Компонент BVK изменения фокусного расстояния, который, в зависимости от окружения (напр., вокзал, городская зона, сельская местность и пр.) и скорости выбирает правильный угол съемки, чтобы таким образом оптимально поддерживать аналитическую оценку изображения. Благодаря этому тогда могут надлежащим образом обслуживаться как ситуации съемки на свободном перегоне (требуют изображений из большой удаленности, чтобы на основании скорости можно быть реагировать своевременно), так и ситуации съемки в области вокзала (требуют изображений, имеющих большую ширину). Дополнительно при слиянии графических данных и данных перегона можно фокусироваться на особенно интересных областях, таких как, напр., железнодорожный переезд.
3. Компонент BLK освещения, выполненный, например, в виде прожектора, который работает в пределах или вне видимой человеку области, и с помощью которого улучшается качество графического материала, снимаемого прибором для записи изображений или, соответственно, прибором BAZG для сбора изображений ночью или при плохих погодных условиях.
Снятые таким образом изображения сохраняются прибором BAZG для записи изображений в устройстве BSPE для запоминания изображений. Это устройство BSPE для запоминания изображений либо, в соответствии с опцией «A», в качестве компонента устройства HEV для распознавания препятствий соответственно соединено с прибором BAZG для записи изображений, либо, в соответствии с опцией «B», вне устройства HEV для распознавания препятствий напр., в виде банка памяти данных, в моторвагоне или в облаке данных предназначено для прибора BAZG для записи изображений или, соответственно, может соединяться с ним.
Для аналитической оценки записанных или, соответственно, собранных изображений для распознавания объектов, которые представляют собой препятствия для рельсового сообщения по рельсовому перегону, напр., упавшее на рельсовый путь дерево в соответствии с фиг.1, прибор BAZG для записи изображений соединен с вычислительным/анализирующим устройством BAWE, которое тоже является одним из компонентов устройства HEV для распознавания препятствий. Для этой цели вычислительное/анализирующее устройство BAWE, как и прибор BAZG для записи изображений, либо, в соответствии с опцией «A», соединено с устройством BSPE для запоминания изображений, либо, в соответствии с опцией «B», предназначено для устройства BSPE для запоминания изображений или, соответственно, может соединяться с ним. Таким образом, возникает блок отдельных функций из вычислительного/анализирующего устройства BAWE, прибора BAZG для записи изображений и устройства BSPE для запоминания изображений, у которого названные компоненты устройства HEV для распознавания препятствий взаимодействуют отдельными функциями для поддерживаемого вычислениями/аналитической оценкой распознавания препятствий.
Для образования полного функционального блока для поддерживаемого вычислениями/аналитической оценкой распознавания препятствий, у которого функционально взаимодействуют являющиеся его частями отдельные блоки, названный блок отдельных функций расширяется другим отдельным блоком, информационным банком IDB данных. При этом информационный банк IDB данных может, например, быть интегрирован с устройством BSPE для запоминания изображений как конструктивный блок в одном общем запоминающем устройстве. Это не изображенное явно на фиг.2 запоминающее устройство может, в свою очередь, так же, как и устройство BSPE для запоминания изображений, либо, в соответствии с опцией «A», в качестве компонента устройства HEV для распознавания препятствий, быть соответственно соединено с прибором BAZG для записи изображений и вычислительным/анализирующим устройством BAWE, либо, в соответствии с опцией «B», вне устройства HEV для распознавания препятствий, в моторвагоне или в облаке данных быть предназначено для прибора BAZG для записи изображений и вычислительного/анализирующего устройства BAWE или, соответственно, может соединяться с ним. В этой связи ссылаемся на устройство для запоминания информации в заявке на патент DE (заявка №102016224355.1) и соответствующей ей международной заявке на патент (заявка № PCT/…; публикация № WO …) об альтернативном определении положения в рельсовом сообщении, когда традиционное определение положений со спутниковой поддержкой не срабатывает или является недостаточным.
В информационном банке IDB данных, наряду с графической метаинформацией BMI, которая в буквальном смысле содержит данные признаков и свойств зарегистрированной на изображениях BIFSB области FSB перегона следования, сохранены дополнительная информация ZI, такая как, напр., планы рельсов или картографический материал, и пр. В соответствии с изображением на фиг.2 информационный банк IDB данных предназначен для устройства HEV для распознавания препятствий или, соответственно, может соединяться с ним таким образом, что вычислительное/анализирующее устройство BAWE для поддерживаемого вычислениями/аналитической оценкой распознавания препятствий получает доступ к сохраненной в информационном банке IDB данных графической метаинформации BMI и дополнительной информации ZI. Для этого информационный банк IDB данных предпочтительно расположен вне устройства HEV для распознавания препятствий, напр., в виде банка данных, в моторвагоне или выполнен в виде облака данных.
Для поддерживаемого вычислениями/аналитической оценкой распознавания препятствий вычислительное/анализирующее устройство BAWE имеет предпочтительно энергонезависимую, считываемую память SP, в которой сохранены считываемые процессором команды управляющей программы управляющего распознаванием препятствий программного модуля PGM, и процессор PZ, который выполняет команды управляющей программы программного модуля PGM для поддерживаемого вычислениями/аналитической оценкой распознавания препятствий. Для этого процессор PZ дополнительно, наряду с доступами к графической метаинформации BMI и дополнительной информации ZI в информационном банке IDB данных в целях управления и для считывания данных получает доступ к прибору BAZG для записи изображений и устройству BSPE для запоминания изображений.
Вычислительное/анализирующее устройство BAWE или, соответственно, программный модуль PGM, имеющий процессор PZ, выполняющий команды управляющей программы программного модуля PGM для поддерживаемого вычислениями/аналитической оценкой распознавания препятствий, теперь применительно к поддерживаемому вычислениями/аналитической оценкой распознаванию препятствий выполнены таким образом, что на каждом из изображений BIFSB маркируется область BIB изображения, которая показывает используемый рельсовым транспортным средством SFZ рельсовый путь GL, при этом путем анализа изображений распознается графически позиционированный маркировкой рельсовый путь GL рельсового транспортного средства SFZ и согласовывается либо с сохраненной в памяти известной графической метаинформацией BMI, либо с сохраненной в памяти известной графической метаинформацией MMI (BMI?) и дополнительной информацией ZI.
Анализ изображений и вместе с тем маркировка выполняется предпочтительно с помощью алгоритмов распознавания кромок, при этом, исходя из зарегистрированного в области FSB перегона следования рельсового пути GL в области BIB изображений, распознается ход используемого рельсовым транспортным средством SFZ рельсового пути GL по изменяющейся на зарегистрированном изображении доле изображения рельсового пути GL по отношению ко всему зарегистрированному изображению.
Помимо этого, предпочтительно, когда изображения BIFSB снимаются с помощью сенсоров на базе радара, основанных на беспроводной локации и измерении расстояния, анализ изображений и вместе с тем маркировка выполняется на базе знания используемого рельсового пути GL, потому что ход используемого рельсового пути GL относительно географического положения известен.
Когда путем анализа изображений графически позиционированный маркировкой рельсовый путь GL рельсового транспортного средства SFZ распознан и согласован либо с сохраненной в памяти известной графической метаинформацией BMI, либо с сохраненной в памяти известной графической метаинформацией BMI и дополнительной информацией ZI, то для фрагмента BIBAS маркированной области BIB изображения, который представляет используемый рельсовый путь GL, а также критическую для рельсового сообщения SVK область, методом распознавания объектов распознается, находится ли на рельсовом пути GL какой-либо объект OBJ, такой как, напр., человек, животное, упавшее дерево и пр., при этом, когда методом распознавания объектов распознается объект OBJ, в области BIB изображения маркируется препятствие, так, напр., когда оно находится в фрагменте BIBAS области изображения и/или когда это потенциальное препятствие.
Методом распознавания образцов выполняется сравнение образцов, базирующееся на положительном сравнении и/или отрицательном сравнении, при этом в случае положительного сравнения проверяется, содержатся ли в фрагменте BIBAS области изображения специфические для объекта образцы, а в случае отрицательного сравнения проверяется, содержится ли в фрагменте BIBAS области изображения какой-либо ожидаемый образец, напр., сплошной, используемый рельсовым транспортным средством SFZ рельсовый путь GL или какая-либо закономерность, которая образуется балками колеи FS или балками рельсового пути между параллельно проходящими рельсовыми путями GL.
Если при отрицательном сравнении проверка заканчивается результатом «НЕТ», то констатированное нарушение закономерности согласовывается в отношении ее ожидания с используемыми в качестве референтной информации и снятыми ранее при пробегах с целью инициализации по перегонам следования изображениями перегона, при этом, когда нарушение закономерности не ожидалось, маркируется препятствие в области BIB изображения, напр., в фрагменте BIBAS области изображения и/или как потенциальное препятствие.
Маркировки препятствий, осуществленные для всех изображений BIFSB в каждой области BIB изображения или, соответственно, в фрагменте BIBAS области изображения, предпочтительно объединяются для комбинирующей различные источники изображений обработки изображений с помощью методов обработки изображений, таких как, напр., модели Хиддена-Маркова. Тем самым может, например, достигаться минимизация вероятности ложного распознавания и предотвращение возникновения «false negatives» (англ. ложные негативы), т.е. ложных предположений, что на колее/рельсовом пути не находится объект, хотя он реально имеется.
Помимо этого, для устройства HEV распознавания препятствий, имеющего интегрированное или предназначенное для него устройство BSPE для запоминания изображений, для таких изображений, для которых аналитическая оценка возможна только с высоким коэффициентом неопределенности, предусмотрена придорожная станция AWS аналитической оценки, которая привязана к устройству для запоминания изображений посредством мобильной связи и принимает из него сохраненные там изображения для модифицированной аналитической оценки. Затем эти изображения могут аналитически оцениваться человеком-экспертом, и затем эта информация может снова возвращаться в устройство BSPE для запоминания изображений.
1. При достаточной ширине полосы связи и доступности людей-экспертов это может осуществляться даже в реальном времени таким образом, что результат аналитической оценки может использоваться для управления железнодорожным/рельсовым транспортным средством.
2. Помимо этого, с помощью придорожной станции AWS аналитической оценки может согласовываться и распределяться графический материал рельсовых транспортных средств одной представительной выборки или нескольких представительных выборок.
Альтернативно станции AWS аналитической оценки для модифицированной аналитической оценки изображений, для которых аналитическая оценка возможна только с высоким коэффициентом неопределенности, возможно также, чтобы машинист поезда или сравнимый железнодорожный служащий, который с целью оформления пассажиров, так или иначе, ездит на рельсовом транспортном средстве, с помощью мобильного прибора оценивал изображения, имеющие высокий коэффициент неопределенности, так, как это делает человек-эксперт в отношении изображений в станции AWS аналитической оценки.
С помощью описанного выше устройства HVE для распознавания препятствий возможно ассистирование или, соответственно, даже реализация автоматизированного (автономного) или с участием машиниста ведения железнодорожного транспортного средства BFZ или, соответственно, рельсового транспортного средства SFZ без дополнительной инфраструктуры по некоторому перегону следования. Это имеет место, в частности, тогда, когда устройство HVE для распознавания препятствий реализовано в виде виртуальной машины, которая выполнена и функционирует как «Software Defined Signal Recognition of Rail Traffic Systems» (англ. программно-определяемое распознавание сигналов систем железнодорожного транспорта).
Тормозная система, рельсовое транспортное средство с тормозной системой, а также способ эксплуатации тормозной системы
Рельсовое транспортное средство
Способ и устройство для зарядки аккумулятора
Способ и устройство для регулирования процесса зарядки аккумулятора
Устройство преобразования энергии для транспортного средства с электроприводом
Транспортное средство с тормозной системой
Способ передачи информации в коммуникационной сети
Устройство автоматизированного движения рельсового транспортного средства, рельсовое транспортное средство и способ осуществления автоматизированного движения рельсового транспортного средства
Способ и компоновка для управления выходной громкостью по меньшей мере одного акустического устройства
Определение продолжительности посадки/высадки объекта
Способ, устройство и железнодорожное транспортное средство, в частности рельсовое транспортное средство, для анализа изображений на базе колеи в железнодорожном сообщении, в частности для анализа изображений на базе рельсового пути в рельсовом сообщении
Способ, устройство и железнодорожное транспортное средство, в частности рельсовое транспортное средство, для распознавания колеи в железнодорожном сообщении, в частности для распознавания рельсового пути в рельсовом сообщении

