Результат интеллектуальной деятельности: КОНТРОЛЬ СОСТОЯНИЯ СЕРВОПРИВОДА В ЛЕТАТЕЛЬНОМ АППАРАТЕ
Вид РИД
Изобретение
Настоящее изобретение относится к устройству для контроля состояния сервопривода в летательном аппарате, а также к соответствующему способу для этого.
Целью контроля состояния узлов в летательном аппарате, в английской терминологии также называется мониторингом работоспособности, является то, чтобы в каждый момент времени получать сведения о конструктивной целостности, оставшемся сроке службы или другую относящуюся к безопасности информацию об узле. При этом основополагающий интерес представляет возможность предсказания отказа узла в летательном аппарате, чтобы иметь возможность принимать ответные меры перед наступлением поломки. Целью контроля состояния (мониторинга работоспособности) является получать текущее состояние контролируемых систем, например сервопривода, чтобы координировать задачи технического обслуживания для летательного аппарата и не допускать наступления критичных для безопасности случаев неисправностей.
Обычные способы контроля состояния в области авиации относятся к кабине летательного аппарата или к конструктивной целостности шасси. Применяемые при этом методы, основанные на механике разрушения, для контроля конструктивных компонентов подробно исследованы в уровне техники и представляют в настоящее время общепринятую практику при контроле состояния кабины летательного аппарата и шасси. При этом следует заметить, что проектирование контролируемых элементов, как, например, кабины летательного аппарата осуществляется отказоустойчивым образом. При возникновении трещины в кабине летательного аппарата, дальнейшее развитие этой трещины только контролируется, и после этого проводятся мероприятия, ограничивающие ущерб.
Из ЕР 1815224 А1 известен контроль состояния для шасси летательного аппарата. Аналогично тому, как и в вышеописанном уровне техники, контроль состояния относится большей частью к конструктивной целостности крупных узлов.
Для определения конструктивной целостности крупных узлов, как правило, измеряется колебательный режим узлов, и полученные измеренные данные преобразуются в частотный диапазон. После этого с помощью фильтра, в оптимальном случае с помощью согласованного фильтра или калмановского фильтра, отыскивают колебательный режим, который является типичным для поврежденного или ослабленного по своей конструкции компонента. Однако для этого целенаправленного процесса фильтрации необходимо знать, как должна выглядеть основная форма искомого сигнала в частотном диапазоне, так чтобы согласованный с ней фильтр мог обнаружить искомую форму сигнала. Это знание приобретают только посредством множества серий неразрушающих испытаний и испытаний с разрушением исследуемых компонентов летательного аппарата. Дополнительно к этим большим объемам данным, существенный вклад вносят опыт эксплуатации подобных узлов и опыт эксплуатации собственно этих узлов. Поэтому требуется, чтобы исследуемый узел достаточно долго находился в распоряжении на площадке для обслуживания, чтобы имелось достаточно времени на проведение серий испытаний.
Таким образом, база данных для такого способа очень велика, так что требуемый для этого объем памяти является огромным. К тому же требуемый объем памяти дополнительно увеличивается из-за требуемой регистрации показаний в реальном времени множества датчиков, не определенных далее (например, датчика колебаний). Также затраты на передачу данных между регистрацией данных в датчике и блоком памяти значительны, так что повышенная подверженность к нарушениям и отказам, наряду с дополнительными затратами на исследования, приобретение, эксплуатацию и поддержание, способствуют снижению общей безопасности и/или снижению готовности системы.
Как уже упоминалось, недостатком в известном уровне техники является то, что перед контролем состояния должна быть создана особенно большая и формируемая с большими затратами база данных, так как только таким образом можно распознать форму сигнала неисправности или предстоящей неисправности. Поэтому воздерживаются от того, чтобы переносить применение обычно используемой систематики на менее релевантные узлы летательного аппарата. Это вызвало бы сильное возрастание расходов на разработку летательных аппаратов или разработку узла летательного аппарата и одновременно увеличило бы вес летательного аппарата, так как должны были бы дополнительно добавляться необходимые узлы для обычного контроля состояния.
Целью настоящего изобретения является предусмотреть контроль состояния для физического исполнительного блока, такого как, например, сервопривода для летательного аппарата, который преодолевает вышеуказанные недостатки. Объектом изобретения также является способ осуществления контроля состояния.
Областью использования для соответствующего изобретению контроля состояния являются, например, основные системы управления полетом летательного аппарата, то есть рули высоты, элероны, рули направления, интерцепторы крена, тормозные интерцепторы, орган регулировки положения несущего винта и/или орган регулировки положения рулевого (хвостового) винта. Кроме того, изобретение может использоваться в системах для создания большой подъемной силы для закрылков. Дополнительной областью использования настоящего изобретения является приведение в действие стабилизаторов для балансировки, регулирование положения воздухозаборников в установках кондиционирования воздуха или двигательных установках, управление заправочными горловинами топливных баков, приведение в действие грузовых ворот и/или иная управляющая, коммуникационная или силовая электроника.
Настоящее изобретение реализуется в устройстве для контроля состояния сервопривода в летательном аппарате, которое содержит процессорный блок для обработки данных и для приведения в действие системной модели сервопривода, по меньшей мере один датчик для регистрации регулирующего параметра сервопривода, и блок памяти, в котором записаны характеристические данные о сервоприводе. Кроме того, процессорный блок сконфигурирован при этом таким образом, чтобы на основе системной модели с использованием регулирующего параметра сервопривода и характеристических данных блока памяти выполнять контроль состояния.
Посредством комбинации системной модели с использованием зарегистрированного датчиком регулирующего параметра сервопривода и характеристических данных, записанных в блоке памяти, обеспечивается в случае сервопривода простое определение фактически оставшегося срока службы, предстоящих затрат на техническое обслуживание или подлежащих принятию неотложных мер для пилотов, бортпроводников, персонала технического обслуживания, авиакомпании и/или инспекции по допуску автотранспортных средств к эксплуатации.
Как уже указано выше, сервопривод представляет собой физическую исполнительную систему, которая сконфигурирована для выполнения различных функций в летательном аппарате. Например, сервопривод используется при основном управлении полетом, например, при изменении положения руля высоты или при установке системы для создания большой подъемной силы, например, предкрылков или закрылков. Системная модель сервопривода может быть наблюдателем (например, Lüneburg), фильтром (например, калмановским) или имитационной моделью (например, Simulink), которая описывает или вычисляет поведение сервопривода при различных обстоятельствах. Ясно, что эта системная модель может приводиться в действие виртуально с помощью процессорного блока.
Регулирующий параметр сервопривода обеспечивается посредством датчика. Этот датчик может, например, быть датчиком температуры масла, датчиком давления масла, датчиком качества масла, датчиком вибрации, датчиком корпусного шума или другим подробно не описываемым датчиком. Характеристические данные, которые записаны в блоке памяти, описывают типовые конструктивные признаки и предельные значения режима регулирования, которые предпочтительно были получены на этапе проектирования сервопривода.
Контроль состояния реализует посредством комбинации сведений из системной модели, существующего сигнала от датчика (регулирующего параметра) и характеристических данных особенно эффективный контроль состояния, который обходится без специфических имеющихся знаний о фактическом старении сервопривода.
Предпочтительным образом концепция контроля состояния состоит в основном из измерительных испытаний регулирования и классического контроля, имитационных моделей, которые доступны из процесса допуска к эксплуатации приборов, общедоступных данных о материалах, свидетельств о прочности, которые доступны из допуска к эксплуатации приборов, и анализов безопасности и надежности, которые также известны из допуска к эксплуатации приборов.
Так как эти компоненты создаются независимо от собственно контроля состояния, а не дополнительно для него, то дополнительные расходы для соответствующего изобретению контроля состояния состоят только из корректной компоновки и согласования этих отдельных элементов. В соответствии с этим соответствующий изобретению контроль состояния обеспечивает возможность простого определения фактически оставшегося срока службы, предстоящих затрат на техническое обслуживание или подлежащих принятию неотложных мер в отношении состояния сервопривода, не требуя, как в уровне техники, специально необходимых для этого детальных серий испытаний.
Согласно другому предпочтительному признаку изобретения, процессорный блок для выполнения контроля состояния представляет собой процессорный блок управляющей электроники сервопривода. Кроме того, он сконфигурирован для управления сервоприводом. То есть, наряду с контролем состояния, процессорный блок одновременно осуществляет управление сервоприводом.
Предпочтительным при таком выполнении является то, что при определенном состоянии контроля состояния, которое делает необходимым вмешательство управляющей электроники, время реакции для выполнения требуемого управления является особенно малым. Это объясняется тем обстоятельством, что процессорный блок управляющей электроники сервопривода одновременно является процессорным блоком для выполнения контроля состояния. Кроме того, предпочтительным в этом признаке является то, что для выполнения контроля состояния не требуется никакой дополнительный компонент. К тому же контроль состояния на основе этого признака может непосредственно принимать сигналы из регулирования, относящегося к собственно приводу, а также обращаться к сигналам из информационного данными с вышестоящими вычислителями (бортовым вычислителем или вычислителем технического обслуживания) или параллельно включенными сервоприводами, без обеспечения дополнительных компонентов. Поэтому в качестве предпочтительного рассматривается выполнение алгоритма контроля состояния процессорным блоком, который также является процессорным блоком управляющей электроники сервопривода.
В соответствии с этим процессорный блок предпочтительным образом сконфигурирован так, чтобы принимать сигналы из регулирования, относящегося к собственно приводу сервопривода, из информационного обмена с вышестоящим вычислителем, таким как бортовой вычислитель или вычислитель технического обслуживания, или параллельно включенным сервоприводом.
Согласно другому предпочтительному варианту изобретения, характеристические данные, записанные в блоке памяти, являются данными из анализов прочности, безопасности и/или надежности сервопривода. Эти данные предпочтительно известны из этапа проектирования сервопривода. Они создавались не дополнительно в расчете на контроль состояния. Характеристические данные могут, таким образом, состоять только из данных, которые сгенерированы не дополнительно с целью контроля состояния. Поэтому для генерации характеристических данных не требуется проводить множество серий неразрушающих испытаний и испытаний с разрушением исследуемых компонентов, как это обычно требовалось при контролях состояний узлов летательных аппаратов.
Кроме того, предпочтительным образом процессорный блок сконфигурирован, чтобы выполнять контроль состояния с целью анализа имеющихся данных в отношении состояния эксплуатации и надежности эксплуатации сервопривода, и предпочтительно чтобы кроме того определять потребность в мероприятиях по техническому обслуживанию, мероприятиях по поддержанию в исправном состоянии, замене компонентов и/или замене приборов. Также процессорный блок сконфигурирован, чтобы соответствующие сообщения передавать на вышестоящие инстанции, приемники которых, в зависимости от неотложности подлежащих выполнению действий, могут быть различными. Так, в зависимости от определенного фактически остающегося срока службы, могут быть целесообразными неотложные меры для пилотов, бортпроводников, персонала технического обслуживания, авиакомпании и/или инспекции по допуску автотранспортных средств к эксплуатации.
Далее, предпочтительным образом процессорный блок сконфигурирован, чтобы получать по меньшей мере один сигнал реального времени для управления сервоприводом или для регистрации регулирующего параметра сервопривода и преобразования в определенное количество параметров, причем предпочтительно количество данных сигнала реального времени больше, чем количество данных параметров. К тому же процессорный блок сконфигурирован, чтобы записывать параметры в блок памяти для последующей маршрутизации, последующей обработки и/или оценки.
Процессорный блок также сконфигурирован, чтобы получать сигнал реального времени и из этого сигнала реального времени извлекать или вычислять один или несколько параметров. При этом осуществляется сокращение данных сигнала реального времени до данных параметра(ов). Эта подготовка к обработке для получения параметров из сигнала реального времени сохраняется затем для последующей маршрутизации, последующей обработки и/или оценки в блоке памяти. Предпочтительно, блок памяти является постоянной памятью, более предпочтительно очень малой постоянной памятью.
В качестве дополнительного предпочтительного развития изобретения предложено, что блок памяти одновременно является блоком памяти для управляющей электроники сервопривода. Тем самым отдельный блок памяти для контроля состояния является излишним, так что общее число компонентов для выполнения соответствующего изобретению контроля состояния дополнительно снижается.
Предпочтительным образом, в блоке памяти записаны опорные значения для параметров, причем процессорный блок дополнительно сконфигурирован, чтобы сравнивать один из параметров с относящимся к нему опорным значением. Предпочтительным образом опорные значения генерируются в ходе процесса допуска к эксплуатации сервопривода, так что специально для контроля состояния не требуются никакие серии испытаний.
Посредством сравнения записанных в блоке памяти опорных значений с параметрами, извлеченными из сигнала реального времени, можно простым способом распознать текущее эксплуатационное состояние сервопривода и отклонение сервопривода от нормального диапазона. Так как к тому же опорные значения в предпочтительном выполнении получаются в ходе процесса допуска к эксплуатации сервопривода, то не возникает никаких дополнительных затрат для генерации этих данных.
Предпочтительным образом, процессорный блок сконфигурирован, чтобы выполнять контроль состояния таким образом, что получается вывод об оставшемся сроке службы и состоянии сервопривода.
Как уже пояснено выше, эта возможность вывода получается из взаимосвязи системной модели, существующего сигнала регулирующего параметра, а также характеристических данных сервопривода.
За счет прогнозирования оставшегося срока службы и оценки состояния сервопривода, интервалы технического обслуживания и замены, обычно выбираемые очень консервативно, могут быть увеличены или увязаны с определенным зарегистрированным состоянием.
Предпочтительным образом, соответствующее изобретению устройство выполнено таким образом, что выводы из контроля состояния на вышестоящую инстанцию, например, на вычислитель технического обслуживания или персоналу летательного аппарата не требуется передавать в реальном времени, так что имеющиеся интерфейсы управляющей электроники сервопривода могут использоваться для передачи информации.
Таким образом, специальные, необходимые только для контроля состояния линии связи могут отсутствовать.
Кроме того, для соответствующего изобретению устройства может быть предпочтительным, если оно кроме того включает в себя по меньшей мере один дополнительный датчик, который генерирует данные специально для контроля состояния, причем по меньшей мере один дополнительный датчик предпочтительно является датчиком корпусного шума, датчиком вибрации, датчиком давления масла, датчиком качества масла и/или датчиком температуры масла.
Кроме того, предпочтительно, если энергоснабжение по меньшей мере одного дополнительного датчика осуществляется путем преобразования вибраций прибора и/или теплоты.
За счет этого конфигурация такого дополнительного датчика может быть осуществлена особенно просто, так как в случае беспроводной связи с процессорным блоком не требуются никакие кабельные соединения для связи или энергоснабжения.
Кроме того, изобретение относится к способу контроля состояния сервопривода летательного аппарата с устройством согласно одному из вышеописанных вариантов осуществления, причем способ содержит следующие этапы: получение регулирующих параметров, задающих параметров и/или параметров состояния из управления или регулирования системы управления приводом сервопривода, сокращение регулирующих параметров, задающих параметров и/или параметров состояния до характеристических параметров для анализов ущерба, усталости и/или износа, применение этих параметров для определения состояния сервопривода, и вывод требуемого действия по техническому обслуживанию и/или поддержания в исправном состоянии из определенного состояния сервопривода.
Предпочтительным образом, анализ ущерба, усталости и/или износа выполняется на основе опорных данных с помощью опорных данных соответствующего анализа. Эти опорные данные выбираются в зависимости от параметров состояния окружающей среды.
Предпочтительным образом, один или несколько этапов выполняются вне устройства, например, в бортовом вычислителе или в вычислителе технического обслуживания летательного аппарата.
При этом также один блок может выполнять этап способа нескольких сервоприводов.
Согласно еще одному варианту изобретения, способ, кроме того, выполняет контроль состояния всего управления полетом относительно оси полета или направления перемещения по продольной оси, поперечной оси и/или вертикальной оси.
Изобретение поясняется далее более подробно на основе примеров выполнения, представленных на чертежах, на которых показано следующее:
Фиг. 1 - обзорное представление контролируемых сервоприводов в летательном аппарате, а также схема их объединения в сеть,
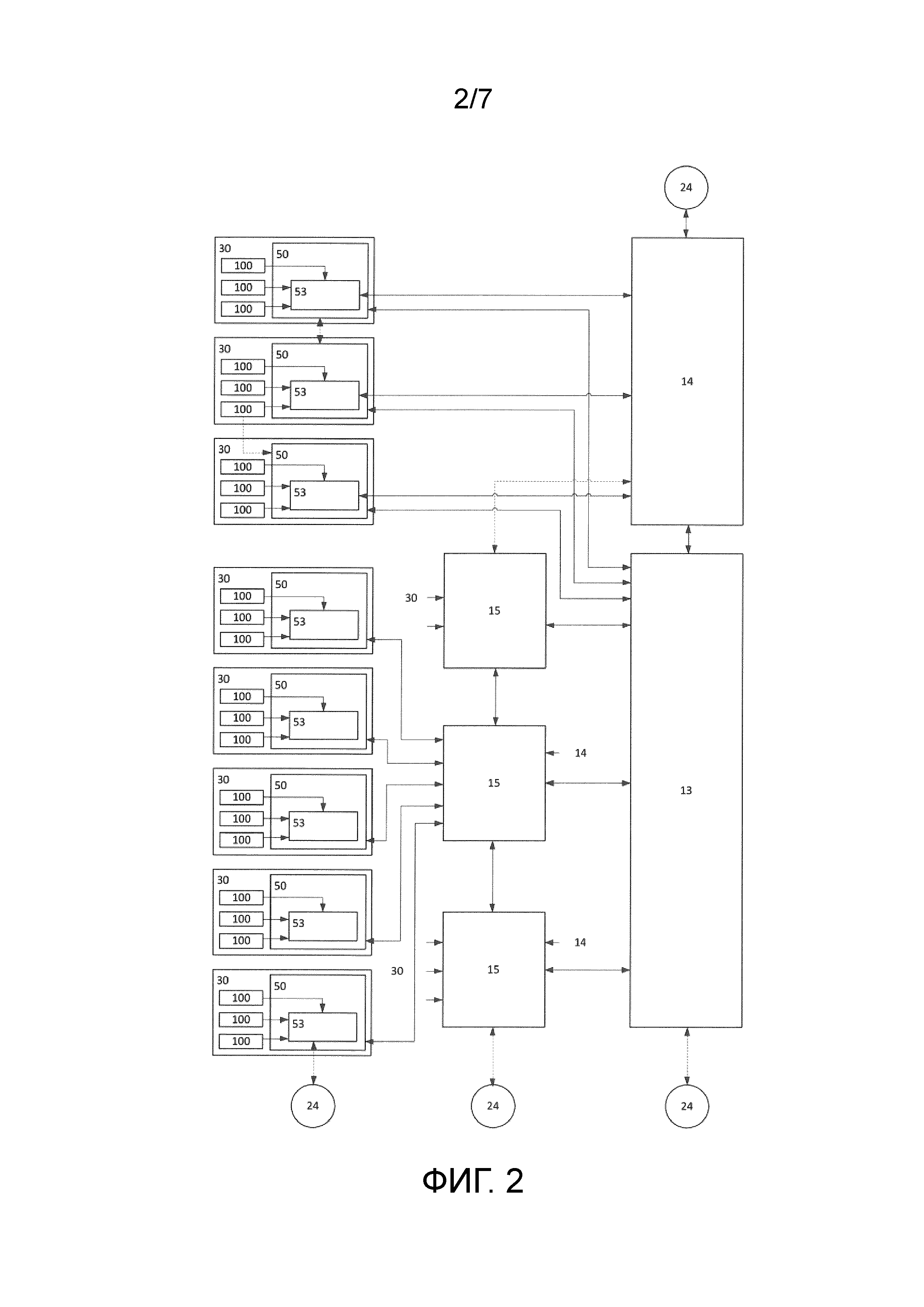
Фиг. 2 - системная архитектура контроля состояния сервоприводов в летательном аппарате,
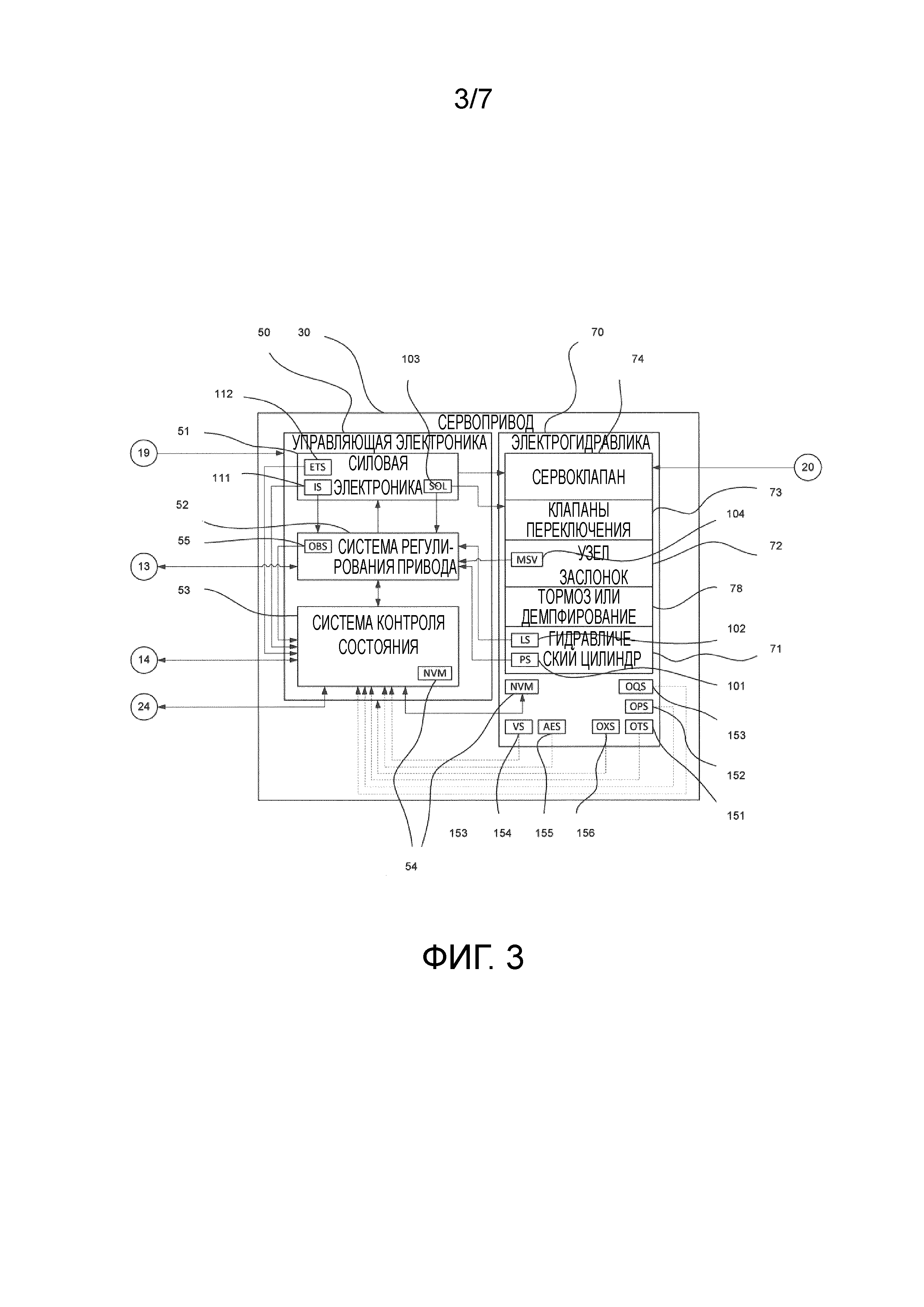
Фиг. 3 - интерфейсы контроля состояния к управляемому сервоклапаном сервоприводу (EHSA),
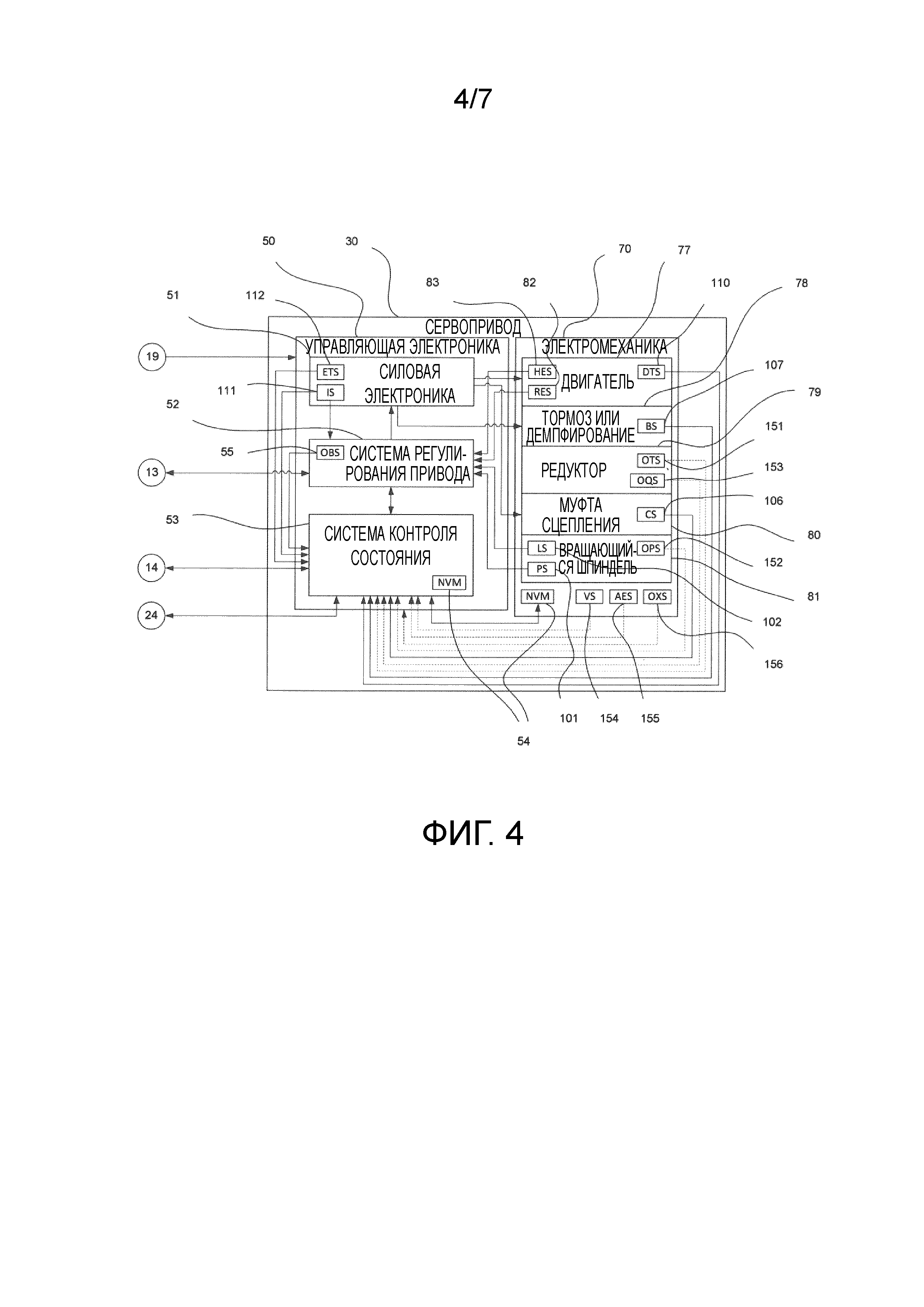
Фиг. 4 - интерфейсы контроля состояния к линейному электромеханическому сервоприводу,
Фиг. 5 - интерфейсы контроля состояния электро-гидростатического сервопривода (ЕНА),
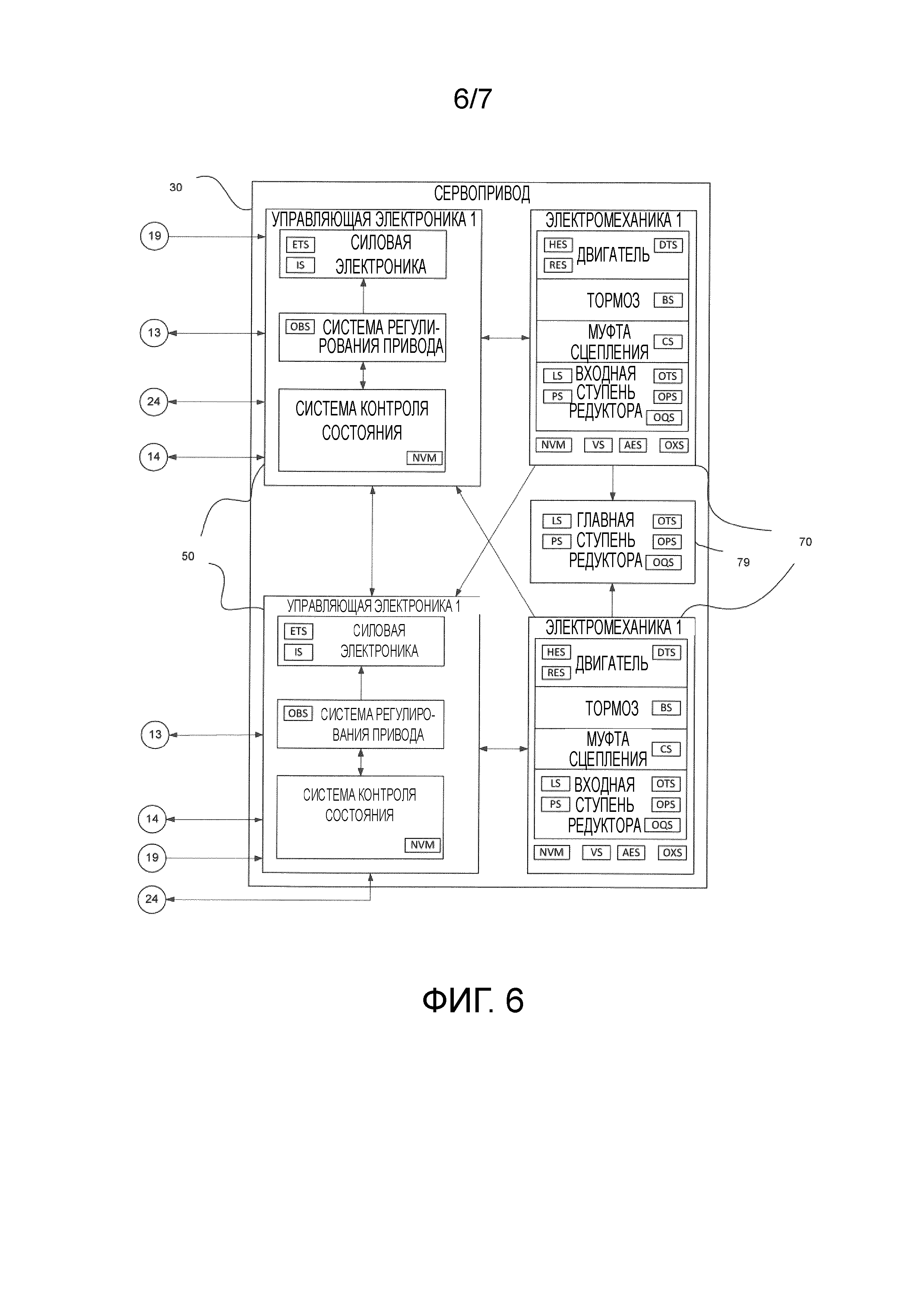
Фиг. 6 - интерфейсы контроля состояния к электрическому приводу для системы создания большой подъемной силы (E-PCU) и
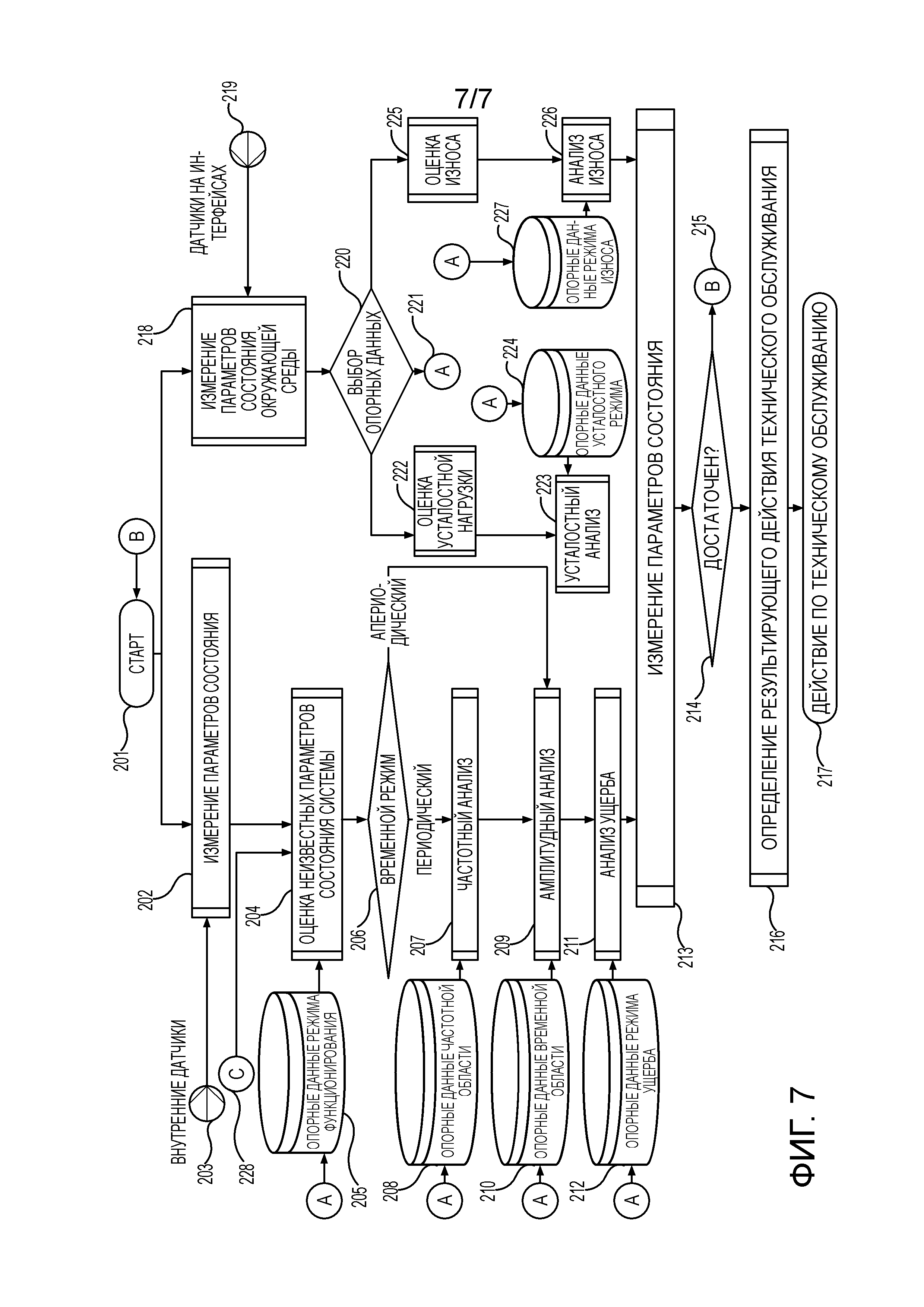
Фиг. 7 - схема последовательности операций для выполнения контроля состояния согласно изобретению.
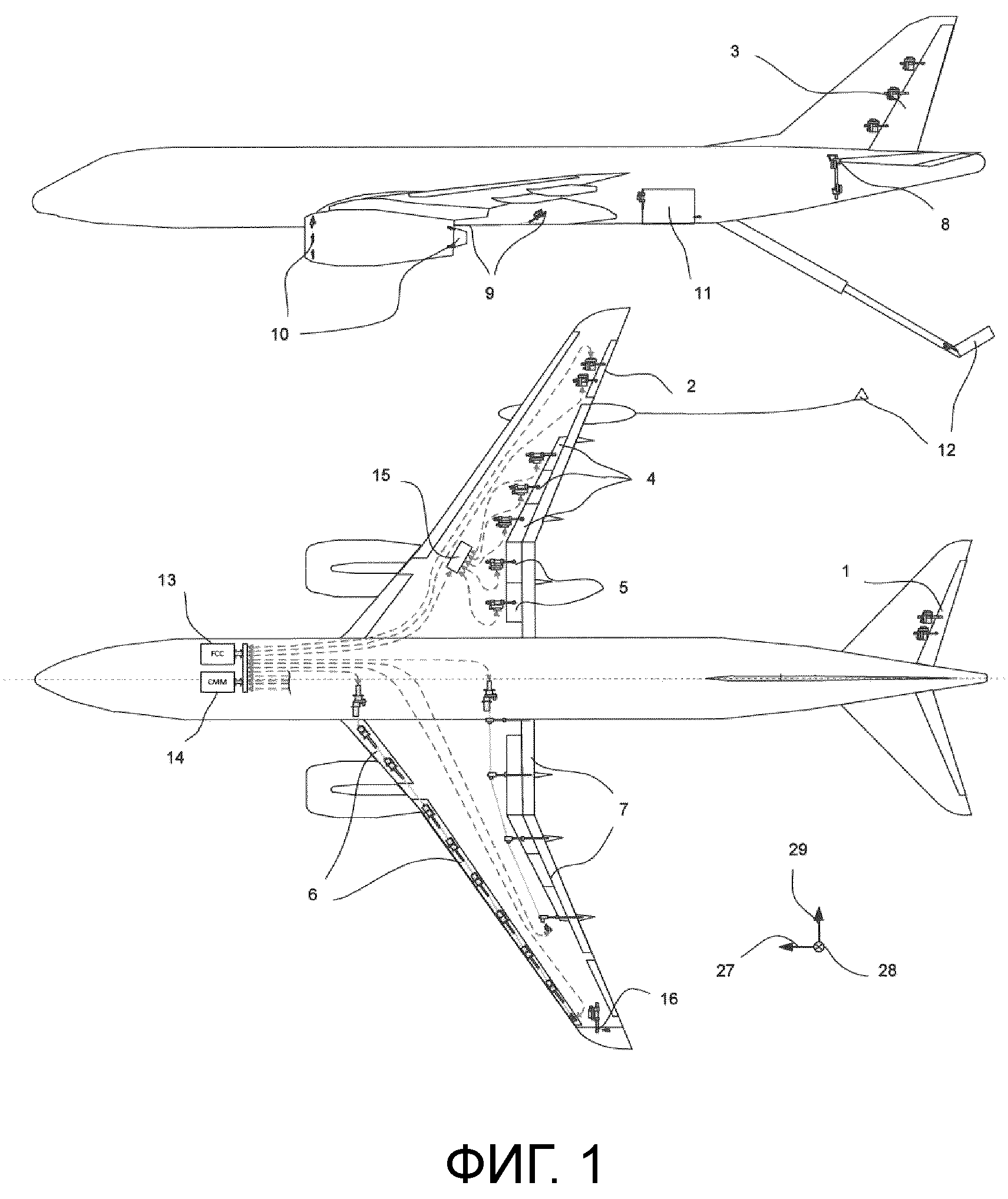
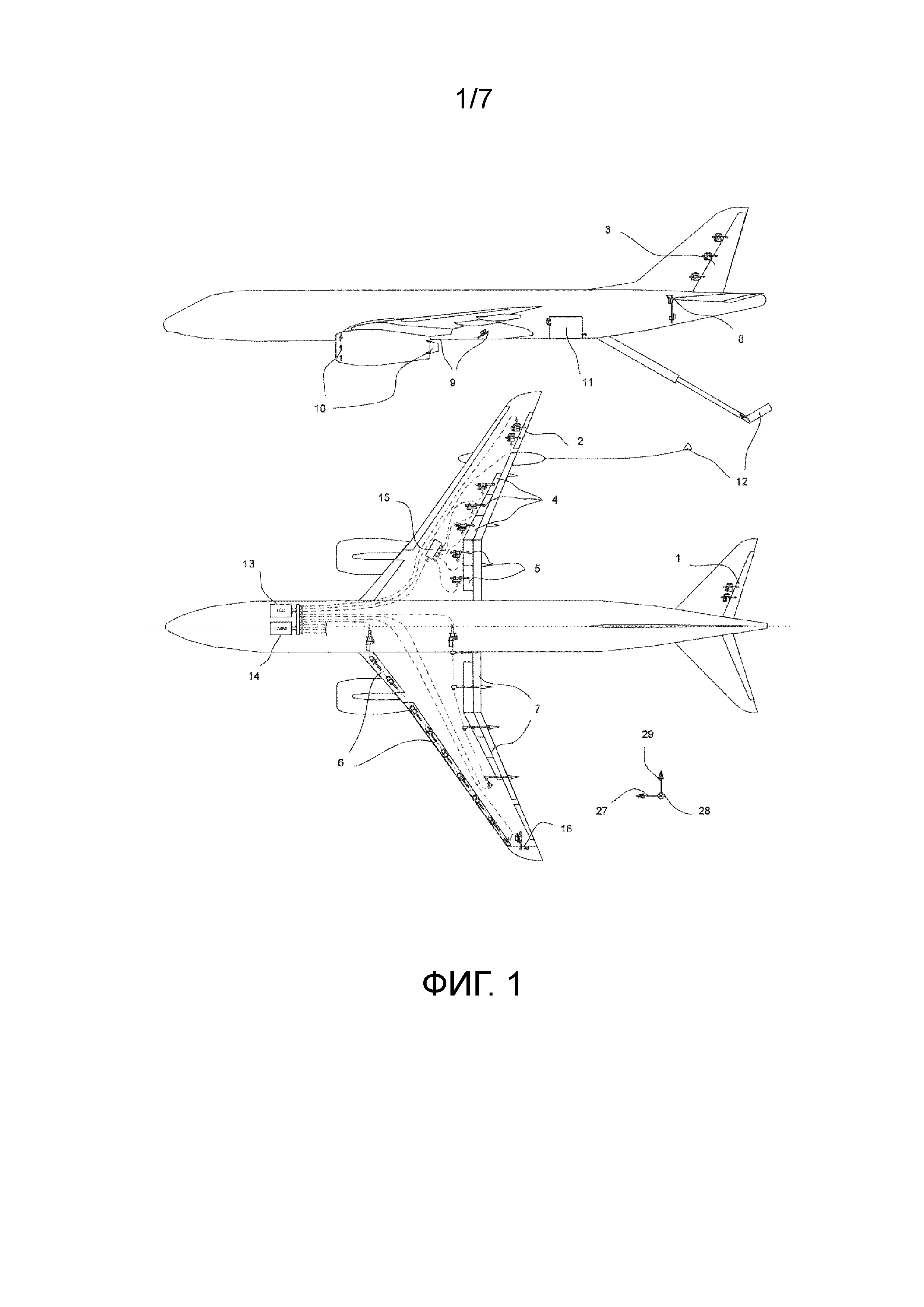
Фиг. 1 показывает летательный аппарат (самолет) на виде сбоку и на виде сверху, на которых изображены различные сервоприводы (1-12) и схема их объединения в сеть с бортовым вычислителем 13 и/или вычислителем 14 технического обслуживания. На виде сбоку летательного аппарата несколько различных сервоприводов снабжены ссылочными позициями. Можно видеть воздухозаборник и выпуск воздуха 10 на двигателе летательного аппарата, подпорные воздушные клапаны 9 установки кондиционирования воздуха, ворота 11 грузового отсека с блокирующим устройством, заправочное устройство 12, балансировку 8 стабилизаторов и руль 3 направления.
На показанном ниже виде летательного аппарата, который является видом сверху летательного аппарата, дополнительные сервоприводы снабжены ссылочными позициями. Кроме того, можно показаны соединения отдельных сервоприводов с бортовым вычислителем 13. По причинам наглядности соединения сервоприводов с опционально предусматриваемым вычислителем 14 технического обслуживания приведены не полностью. Так показаны, например, модуль 15 питающей мощности, сервопривод на предкрылке 6, тормозной интерцептор 5, многофункциональный интерцептор 4, элерон 2, закрылки 7, механизм 16 крыльевых щитков с блокировочным устройством и руль 1 высоты. Для лучшей ориентации внизу справа на фиг. 1 приведено определение осей. Стрелка, обозначенная ссылочной позицией 27, описывает положение продольной оси, стрелка, обозначенная ссылочной позицией 29, описывает положение поперечной оси, и стрела, проходящая перпендикулярно продольной и поперечной оси, которая обозначена ссылочной позицией 28, описывает вертикальную ось для нижней области представления.
На основе представления на фиг. 1 можно видеть, что на летательном аппарате имеется множество различных сервоприводов. При этом они могут оказывать различные воздействия на стабильность и характеристики полета летательного аппарата и находят применение в пределах большого диапазона, включающего в себя функции от релевантных для безопасности до менее релевантных для безопасности функций.
Фиг. 2 показывает системную архитектуру при контроле состояния сервоприводов 30 на летательном аппарате. При этом данная фигура грубо разделена на три участка, так что она имеет левую, среднюю и правую область. В левой области в соответствии с этим представлены различные сервоприводы 30, которые либо непосредственно, либо через модуль 15 питающей мощности, который расположен в средней области на чертеже, осуществлять связь с бортовым вычислителем 13 и/или вычислителем 14 технического обслуживания. При этом бортовой вычислитель 13 и соответственно вычислитель 14 технического обслуживания расположены в правой области на чертеже. Основная структура нескольких представленных в левой области на чертеже сервоприводов 30 не отличается по своим главным компонентам или отличается лишь незначительным образом.
Можно видеть, что каждый сервопривод 30 имеет датчики 100, которые осуществляют обмен информацией с управляющей электроникой 50 или с инсталлированной на ней системой 53 контроля состояния.
Коммуникация сервопривода 30 может при этом осуществляться непосредственно с вычислителем 14 технического обслуживания, бортовым вычислителем 13 или через промежуточно включенный между бортовым вычислителем 13 и/или вычислителем 14 технического обслуживания модуль 15 питающей мощности. Кроме того, возможна также непосредственная коммуникация отдельных сервоприводов между собой, как это изображено для примера в левой верхней части чертежа. Кроме того, бортовой вычислитель 13, вычислитель 14 технического обслуживания, а также модуль 15 питающей мощности и сервопривод 30 имеют интерфейс 24 для доступа и съема данных соответствующего блока. В качестве сервопривода могут применяться все представленные на фиг. 1 физические приводные блоки. Кроме того, специалисту также ясно, что на летательном аппарате имеется множество других сервоприводов, которые пригодны для использования изобретения и также охватываются им.
Фиг. 3 показывает соответствующее изобретению устройство для контроля состояния сервопривода на примере электрогидравлического сервоклапана с соответствующей управляющей электроникой и датчиками (сенсорикой).
Сервопривод 30 соединен с гидравлическим обеспечением 20, электропитанием 19, бортовым вычислителем 13, вычислителем 14 технического обслуживания и с интерфейсом 24 для доступа и съема данных. Кроме того, сервопривод 30 имеет управляющую электронику 50 и электрогидравлику 70.
Управляющая электроника 50 включает в себя силовую электронику, систему 52 регулирования привода для сервопривода и систему 53 контроля состояния. Силовая электроника 51 имеет температурный датчик 112 электроники, датчик 111 выходного тока и блок 103 обратной связи клапанов переключения. Кроме того, силовая электроника 51 принимает сигналы от системы 52 регулирования привода.
Система 52 регулирования принимает сигналы датчиков 111 выходного тока силовой электроники 51 и данные устройства 103 обратной связи клапанов переключения и обратную связь узла 104 заслонок. Кроме того, регулирование привода принимает регулируемые параметры гидравлического цилиндра 71 от датчика 101 положения сервопривода и датчика 102 нагрузки.
Кроме того, система 52 регулирования привода соединено с системой 53 контроля состояния через двунаправленную линию связи.
Система 53 контроля состояния включает в себя блок 54 памяти, который предпочтительно выполнен как постоянная память, и принимает множество сигналов силовой электроники 51, система 52 регулирования привода и электрогидравлики 70. Так система 53 контроля состояния принимает сигнал температурных датчиков 112 электроники, сигнал датчиков 111 выходного тока, параметры 55 состояния регулирования, а также множество сигналов датчиков электрогидравлики 70.
Показано, что система 53 контроля состояния встроена в управляющую электронику 50. Электрогидравлика 70 принимает сигналы от силовой электроники 51 для преобразования соответствующих заданных значений. Гидравлика 70 включает в себя датчик 153 качества масла, датчик 152 давления масла, датчик 151 температуры масла, другие датчики 156, датчик 155 корпусного шума и датчик 154 вибрации. Кроме того, гидравлика 70 имеет блок памяти 54, который имеет двустороннее соединение связи с системой 53 состояния. Кроме того, гидравлика 70 включает в себя сервоклапан 74, клапан 73 переключения, узел 72 заслонок с устройством 104 обратной связи узла заслонок, тормоз 78 и гидравлический цилиндр 71, который включает в себя датчик 101 положения и датчик 102 нагрузки.
Показано, что системой 53 контроля состояния может выполняться на основе системной модели контролируемого сервопривода с использованием регулирующего параметра сервопривода 30 и данных, сохраненных в блоке памяти 54.
Фиг. 4 показывает схему контроля состояния линейного электромеханического сервопривода, основная структура которого очень сходна с сервоприводом 30, описанным на фиг. 3. Поэтому далее более подробно будут описаны только отличающиеся элементы. Сервопривод 30 содержит теперь управляющую электронику 50 и электромеханику 70. Электромеханика 70 содержит двигатель 77, тормоз 78, редуктор 79, муфту сцепления 80, вращающийся шпиндель 81. Кроме того, электромеханика 70 имеет датчик 154 вибрации и датчик 155 корпусного шума, наряду с другими датчиками 156. Кроме того, двигатель 77 имеет температурный датчик 110, тормоз имеет устройство 107 обратной связи, редуктор имеет датчик 151 температуры масла и датчик 153 качества масла, муфта сцепления 80 имеет устройство 106 обратной связи, и вращающийся шпиндель имеет датчик 152 давления масла, причем выдаваемые значения вышеуказанных датчиков 110, 107, 151, 153, 106, 152 все подаются на систему 53 контроля состояния в управляющей электронике 50.
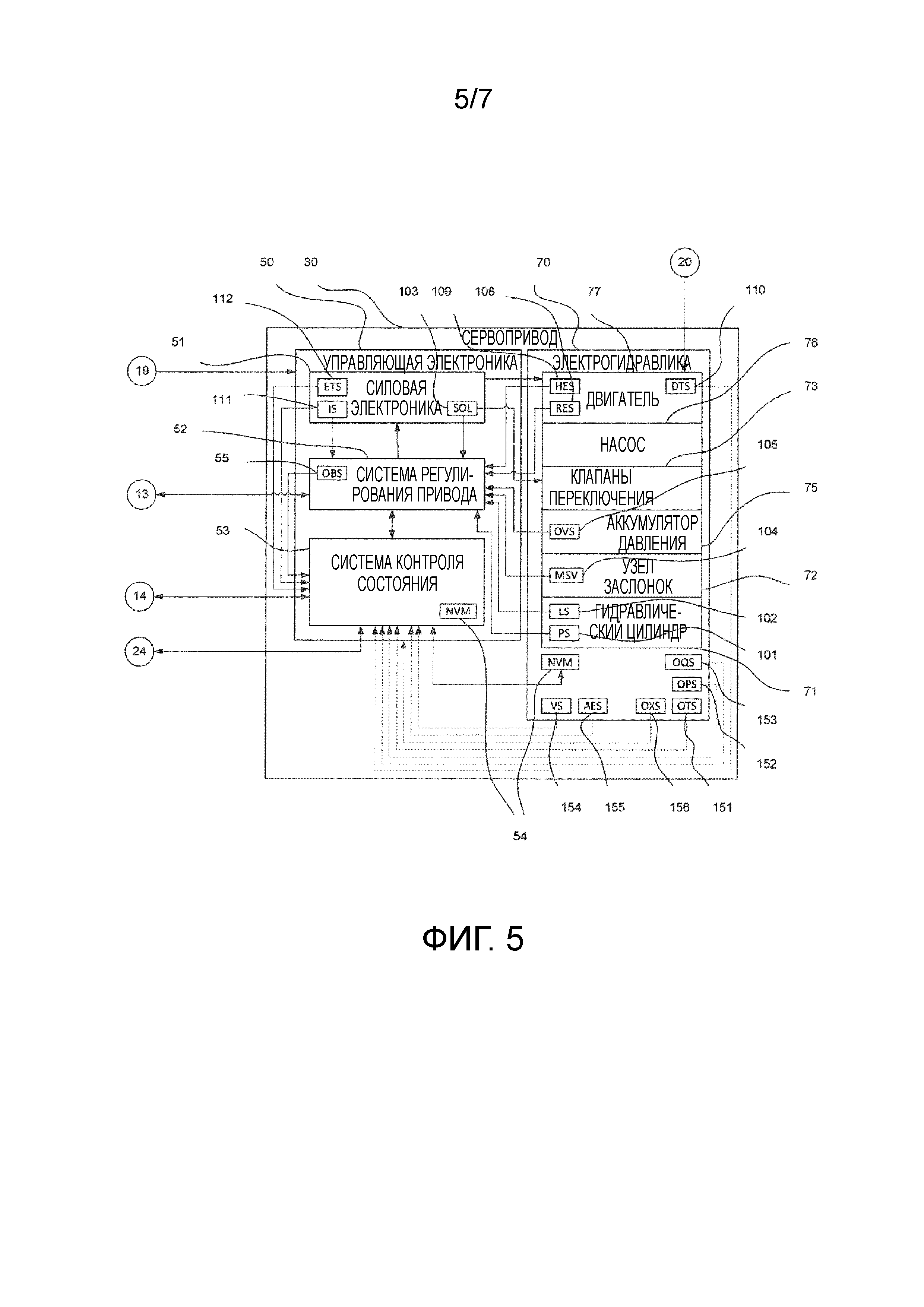
Фиг. 5 показывает схему контроля состояния электро-гидростатического сервопривода (ЕНА). Он также не отличается по принципиальной структуре от управляющей электроники 50 и ее компонентов силовой электроники 51, системы регулирования 55 привода и системы 53 контроля 53 состояния. Только тип данных датчиков, подаваемых на систему 53 контроля 53 состояния, изменяется, ввиду различающегося типа сервопривода. Электрогидравлика 70 включает в себя двигатель 77, насос 76, клапан 73 переключения, аккумулятор 75 давления, узел 73 заслонок и гидравлический цилиндр 71. Кроме того, электрогидравлика 70 включает в себя датчик 151 температуры масла, датчик 152 давления масла, датчик 153 качества масла, датчик 154 вибрации, датчик 155 корпусного шума и другие датчики 156.
Как показано с помощью фиг. 2-5, для соответствующего изобретению контроля состояния не имеет значения, какой тип сервопривода должен контролироваться относительно его состояния. При этом конкретное выполнение сервопривода 30 не принципиально. В соответствии с этим соответствующее изобретению устройство также может использоваться с ротационным электромеханическим сервоприводом или с электро-гидростатически поддерживаемым сервоприводом.
Фиг. 6 показывает интерфейсы контроля состояния к электрическому приводу, который типичен для системы создания большой подъемной силы (E-PCU). При этом сервопривод 30 включает в себя два блока 50 управляющей электроники и два блока электромеханики 70. Кроме того, можно видеть главную ступень 79 редуктора, которая принимает сигналы от обоих блоков электромеханики 70. К тому же каждый из блоков 70 электромеханики имеет соединение с каждым из блоков управляющей электроники 50. Также блоки управляющей электроники 50 имеют двунаправленную линию связи между собой. В целом, таким образом, можно видеть резервированное выполнение управляющей электроники 50 и электромеханики 70, требуемой для установки главной ступени 79 редуктора. Так как контроль состояния включается в управляющую электронику 50 или выполняется на ее процессоре, он также выполнен сдвоенным.
Фиг. 7 показывает схему последовательности операций для выполнения контроля состояния согласно изобретению. Программа начинается в элементе, обозначенном ссылочной позицией 201 и затем разделяется на две исполняемые параллельно ветви обработки. Альтернативно, эти ветви обработки могут также обрабатываться последовательным способом. Это особенно полезно при менее производительном процессорном блоке для выполнения контроля состояния. После старта контроля состояния параметры состояния измеряются (202) в системе. При этом обращаются к внутренним для системы датчикам (203). После измерения параметров состояния в системе оценивают (204) неизвестные параметры состояния системы. При этом осуществляют оценку с обращением к опорным данным для режима функционирования (205) и к сигналам от интерфейса к регулированию привода (228). Затем пытаются распознать (206) конкретный временной режим (206). При периодических неизвестных параметрах состояния системы осуществляется частотный анализ (207), то есть выполняется анализ временного режима. При этом обращаются к опорным данным в частотной области (208), которые представляют известную неисправность в частотной области. После этого осуществляется амплитудный анализ (209), к которому можно также непосредственно перейти, если при распознавании конкретного временного режима (206) распознаются периодические структуры. Также при амплитудном анализе (209) работают с опорными данными во временной области (210). После оценки этих обоих анализов осуществляется анализ ущерба (211), который также обращается к опорным данным для режима ущерба (212). Полученный результат анализа ущерба способствует затем определению оставшегося срока службы (213).
Параллельно с этой главной ветвью обработки, с начала контроля состояния имеется дополнительная ветвь обработки, которая представлена ниже. После начала контроля состояния, измеряются (218) параметры состояния окружающей среды с помощью датчиков на интерфейсах (219). На основе этого измерения определяются примененные выше опорные данные, такие как опорные данные для режима функционирования (205), опорные данные в частотной области (208), опорные данные во временной области (209) и опорные данные для режима ущерба (212) (см. А). К тому же на основе измерения параметров состояния окружающей среды (218) оценивается усталостная нагрузка (222). После оценки усталостной нагрузки осуществляется усталостный анализ (223) на основе опорных данных для усталостного режима (224), причем эти опорные данные также выбираются в зависимости от измерения параметра состояния окружающей среды. Усталостный анализ (223) способствует тогда, как и анализ ущерба (211), определению оставшегося срока службы (213). После измерения параметров состояния окружающей среды (218), параллельно с оценкой усталостной нагрузки (222) и выбором опорных данных (220), при котором определяется индекс блока опорных данных (221), осуществляется оценка износа (225). После выполненной оценки износа осуществляется анализ износа (226) с обращением к опорным данным для режима износа (227), которые определяются на основе индекса блока опорных данных (221). Результаты анализа износа (226) также привлекаются для определения оставшегося срока службы (213). На основе анализа ущерба (211), усталостного анализа (223) и анализа износа (226) может определяться оставшийся срок службы (213). После этого можно определить, достаточен ли этот определенный оставшийся срок службы или нет (214).
Если оставшийся срок службы достаточно высок, то есть превышает предварительно установленное пороговое значение, то способ начинается повторно (215). Если установлено, что оставшийся срок службы снизился ниже порогового значения, то на этой основе определяется результирующее действие по техническому обслуживанию (216). На заключительном этапе вводится определенное таким образом действие по техническому обслуживанию (217).
Устройство контроля за синхронностью закрылков самолетного крыла
Модульная электронная система управления полетом
Устройство по меньшей мере с одним резистором птк
Сенсорная система для контроля синхронного хода рулевых поверхностей самолета
Способ соединения гофрированного шланга с корпусом, система с гофрированным шлангом и соединенным с ним корпусом и воздушное средство сообщения, по меньшей мере, с одной указанной системой
Привод ходового винта
Привод ходового винта
Установочное устройство для позиционирования конструктивного элемента
Сервоклапан
Электронный блок для периферийных приборов летательного аппарата

