Результат интеллектуальной деятельности: МОДУЛЬНАЯ ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛЕТОМ
Вид РИД
Изобретение
Изобретение относится к модульной электронной системе управления полетом, в которой гидравлические и электромеханические исполнительные модули для приведения в движение поверхностей управления полетом управляются исполнительными электронными блоками управления (АСЕ: actuator control electronic).
В таких электронных системах управления полетом особо важное значение имеет гарантия функционирования всей системы, даже если из-за дефектов из строя выходят отдельные элементы. С этой целью выбирают, как правило, избыточное конструктивное выполнение с наличием нескольких параллельно работающих подсистем для повышения безопасности и надежности всей системы.
Известны применяемые для этого центральные, многократно избыточные вычислительные системы, в которых каждый из центральных управляющих компьютеров получает заданные пилотом значения, вводимые, например, через боковые ручки управления или обычные штурвальные колонки с датчиками, обрабатывает их и на основе обработанных заданных значений управляет несколькими или всеми исполнительными элементами.
Также из US-B93339 известна электронная система управления полетом, в которой несколько параллельно соединенных, главных вычислительных систем решают более сложные задачи регулирования, в то время как также параллельно соединенные исполнительные электронные блоки управления управляют исполнительными модулями, благодаря чему при выходе из строя главных вычислительных машин исполнительные модули по-прежнему могут управляться непосредственно исполнительными электронными блоками управления. Правда, в данном случае исполнительные электронные блоки управления представляют собой крупные центральные устройства, одновременно управляющие множеством исполнительных модулей. Отсюда следуют проблемы в отношении безопасности, так как выход из строя одного исполнительного электронного блока управления сразу сказывается на нескольких исполнительных модулях. Кроме того, управляющие устройства имеют сложную конструкцию, что затрудняет обнаружение неисправностей в программном и аппаратном обеспечении. Также возникают проблемы, связанные с техническим обслуживанием и затратами, так как при наличии дефекта приходится полностью заменять центральные устройства. Кроме того, требуется также заново разрабатывать комплексную систему по каждому типу самолета с учетом разного количества исполнительных модулей.
Задачей изобретения является, поэтому создание электронной системы управления полетом, которая способна надежно и просто подвергаться техническому обслуживанию, а также легко приводиться в соответствие с разными моделями самолетов.
Согласно изобретению данная задача решается с помощью модульной электронной системы управления полетом по пункту 1 формулы изобретения. Такая модульная электронная система управления полетом включает в себя центральную систему, состоящую из исполнительных модулей и исполнительных электронных блоков управления, причем каждому исполнительному модулю придан отдельный исполнительный электронный блок управления, воспринимающий непосредственно заданные пилотом значения и способный управлять с их помощью исполнительным модулем.
Модульное исполнение является особо надежным, так как при выходе из строя одного исполнительного электронного блока управления другие исполнительные электронные блоки управления сохраняются исправными и, следовательно, все другие исполнительные модули продолжают работать. Следовательно, избыточные системы могут быть просто созданы за счет того, что на каждой оси управления полетом будет расположено несколько исполнительных модулей с приданными им исполнительными электронными блоками управления. В случае выхода из строя одного из исполнительных электронных блоков управления или одного из исполнительных модулей сохраняются другие модули, способные надежно управлять соответствующей функцией. Также модульное исполнение облегчает техническое обслуживание, так как возможно легко тестировать функциональность подсистем и в случае наличия дефекта требуется лишь заменять неисправную деталь. Кроме того, такую модульную систему можно легко привести в соответствие с разными типами самолетов, поскольку при разном количестве необходимых исполнительных модулей требуется лишь просто дополнить систему другими модулями с приданными им исполнительными электронными блоками управления. В результате того, что исполнительный модуль должен управляться только одним исполнительным электронным блоком, исполнительный электронный блок управления может быть конструктивно выполнен относительно простым, благодаря чему снижаются конструкторские затраты и повышается безопасность, так как легче выявляются ошибки программного и аппаратного обеспечения.
Предпочтительно, чтобы модульная электронная система управления полетом согласно изобретению содержала наряду с центральной системой также, по меньшей мере, одну главную вычислительную машину для управления полетом, которая обрабатывает заданные пилотом значения и в нормальном режиме направляет в исполнительные электронные блоки управления уставки вместо непосредственно заданных пилотом значений. Комплексные задачи регулирования, облегчающие пилотам управление самолетом, могут выполняться главными вычислительными машинами для управления полетом, выполненными раздельно от центральной системы. В случае выхода из строя этих главных вычислительных машин самолет по-прежнему может управляться непосредственно пилотом с помощью центральной системы.
Исполнительные электронные блоки управления содержат предпочтительно логическую схему выбора, которая решает, будут ли применяться непосредственно заданные пилотом значения или же уставки главных вычислительных машин для управления полетом, предназначенные для управления исполнительными модулями. Такой логической схемой выбора обеспечивается положение, при котором в аварийном случае возможен переход на прямое управление с помощью центральной системы, чем достигается повышенная безопасность.
Кроме того, предпочтительно логическая схема выбора использует непосредственно заданные пилотом значения для управления исполнительными модулями в том случае, когда уставки главных вычислительных машин для управления полетом отсутствуют или являются ошибочными или противоречивыми. В результате надежно выявляются выход из строя или ошибки главных вычислительных машин для управления полетом и обеспечивается надежное управление с помощью центральной системы. Также в случае применения нескольких главных вычислительных машин для управления полетом логическая схема выбора может решить путем сравнения поступивших от них уставок, которая из них является правильной и которая затем используется для управления исполнительными модулями. В противном случае, в целях безопасности, необходимо будет использовать непосредственно задаваемые пилотам значения.
Предпочтительно, чтобы каждый исполнительный электронный блок управления состоял из дуплексной избыточной, автоматически обнаруживающей дефекты вычислительной системы, состоящей из устройства управления и контрольного устройства. В результате исключается наличие не обнаруженного дефекта в исполнительных электронных блоках управления, так как дефект устройства управления выявляется параллельно подключенным контрольным устройством. В случае необходимости исполнительный электронный блок управления переходит затем в надежное пассивное состояние.
Предпочтительно, чтобы устройство управления и контрольное устройство исполнительных электронных блоков управления отличались между собой как выполнением программного обеспечения, так и выполнением аппаратного обеспечения. Этим достигается положение, при котором в устройствах управления и в контрольных устройствах не могут происходить одинаковые совместные сбои, что дополнительно повышает безопасность.
Предпочтительно, чтобы исполнительные электронные блоки управления и исполнительные модули были выполнены раздельными, благодаря чему электронная часть может располагаться на центральном участке, иметь облегченный доступ и, следовательно, облегчается ее техническое обслуживание.
Также предпочтительно, чтобы исполнительные электронные блоки управления располагались в одном или нескольких выступающих корпусах, благодаря чему упрощаются электрические и механические интерфейсы. При наличии критических в отношении безопасности осей управления полетом предпочтительно исключается одновременный выход из строя всех исполнительных электронных блоков управления из-за совместного сбоя благодаря расположению модулей в двух выступающих корпусах и применению двух разных видов исполнительных электронных блоков управления, причем оба вида исполнительных электронных блоков управления различаются между собой как в отношении выполнения аппаратного обеспечения, так и в отношении выполнения программного обеспечения.
При этом на критическую в отношении безопасности поверхность управления воздействуют два исполнительных модуля, причем один из них управляется исполнительным электронным блоком одного типа, а другой исполнительный модуль - исполнительным электронным блоком другого типа. Поскольку для приведения в движение поверхности управления достаточно только одного исполнительного модуля, то активным является только один исполнительный модуль, в то время как другой исполнительный модуль остается пассивным и находится в режиме ожидания. Если же в активном исполнительном модуле или его устройстве управления возникает дефект, то этот модуль переключается в безопасный пассивный режим, а пребывавший до этого в пассивном состоянии исполнительный модуль начинает управлять поверхностью управления.
Поскольку существующие электронные системы управления полетом основаны на аналоговых исполнительных электронных блоках управления и механических устройствах аварийного управления, то с их помощью создается модульная, полностью основанная на микропроцессоре электронная установка в целом с четырьмя разными, не похожими каналами ВМ для каждой поверхности управления.
При использовании, по меньшей мере, одной главной вычислительной машины для управления полетом заданные пилотом значения модулируются в главной вычислительной машине предпочтительно с помощью разных статических и динамических параметров положения и ситуации во время полета с получением заданных регулирующих законов и затем в виде уставок снова направляются в исполнительные электронные блоки управления. На основании этих уставок исполнительные электронные блоки управляют исполнительными модулями. Вследствие переменного прикладного программного обеспечения вычислительных машин для управления полетом объем и вид регулирующих законов являются существенно произвольными и заново определяются от самолета к самолету на основе аэродинамических и функциональных требований. Это также снижает расходы, так как приходится изменять только программное обеспечение для главных вычислительных машин для управления полетом, в то время как исполнительные электронные блоки управления могут применяться на всех типах самолетов.
Предпочтительно, чтобы также и главные вычислительные машины для управления полетом представляли собой дуплексную избыточную, автоматически обнаруживающую дефекты вычислительную систему, состоящую из устройства управления и контрольного устройства. Также и в этом случае устройство управления и контрольное устройство главных вычислительных машин управления полетом отличаются предпочтительно между собой как выполнением своего программного обеспечения, так и выполнением своего аппаратного обеспечения. Аналогично исполнительным электронным блокам управления здесь также исключается благодаря такой конструкции ошибочная генерация уставок для центральной системы из-за одинакового сбоя. Если между устройством управления и контрольным устройством произойдет рассогласование, то главная вычислительная машина для управления полетом автоматически переключится в надежный пассивный режим.
В то время как сегодняшний уровень техники предусматривает для подобных случаев применения жесткую конфигурацию вычислительных машин, то описываемые здесь главные вычислительные машины для управления полетом являются гибкими в отношении своего количества. В зависимости от требования к коэффициенту готовности могут одновременно применяться одна или несколько вычислительных машин для управления полетом.
Предпочтительно главные вычислительные машины для управления полетом управляют исполнительными электронными блоками управления в нормальном режиме управления полетом через задание уставок, в то время как в режиме прямого управления полетом центральная система управляется непосредственно с помощью заданных пилотом значений. Таким образом при нормальном режиме управления полетом самолета используются сложные регулирующие функции главных вычислительных машин для управления полетом. Если в них происходят сбои или же главные вычислительные машины для управления полетом полностью выходят из строя, то можно переключиться на режим прямого управления полетом, в котором исполнительные электронные блоки управления и, следовательно, исполнительные модули управляются непосредственно с помощью заданных пилотом значений. Следовательно, такая многократно избыточная система дополнительно повышает безопасность.
Предпочтительно, чтобы исключительными компонентами нормального режима управления полетом служили такие функции, которые не являются критическими в отношении безопасности. Благодаря этому становится возможным применение для главных вычислительных машин управления полетом только одного типа аппаратуры. Правда, при этом выход из строя всех главных вычислительных машин для управления полетом вследствие совместного отказа не является чрезвычайно невероятным в смысле документа FAR 25, что, однако не представляет собой проблему для безопасности, так как все критические в отношении безопасности функции предусмотрены в режиме прямого управления полетом. Такое конструктивное выполнение с применением нескольких главных вычислительных машин одинакового типа для управления полетом имеет то преимущество, что в большинстве случаев не критические, но относительно сложные и объемные функции нормального режима управления полетом должны разрабатываться и допускаться только для двух несхожих каналов ВМ.
Само собой разумеется, что модульная система управления полетом (согласно изобретению) не исключает возможности применения, в целях повышения безопасности, двух, отличающихся программным и аппаратным обеспечением типов главных вычислительных машин для управления полетом.
В случае сбоя или рассогласования по данным всех главных вычислительных машин предпочтительно переходят с нормального режима управления полетом на режим прямого управления полетом, вследствие чего вся модульная электронная система управления полетом после выхода из нормального режима управления полетом поддерживается центральной системой, выполняющей все критические в отношении безопасности функции. Это гарантируется, в частности, тем, что все функции режима прямого управления полетом относятся к исполнительным электронным блокам управления.
Для этого исполнительные электронные блоки управления модульной электронной системы управления полетом согласно изобретению содержат предпочтительно логическую схему выбора, которая решает, будут ли применяться для управления исполнительными модулями непосредственно заданные пилотом значения или уставки вычислительных машин управления полетом. Это соответствует переключению с нормального режима управления полетом на режим прямого управления полетом.
Затем предпочтительно перейти с нормального режима управления на прямой режим, если поступающие от нескольких главных вычислительных машин для управления полетом уставки окажутся ошибочными или противоречивыми или будут полностью отсутствовать. В результате при использовании двух одновременно работающих главных вычислительных машин для управления полетом обеспечивается положение, при котором в случае сбоя одной из главных вычислительных машин для управления полетом для обеспечения безопасности переходят на центральную систему, если при этом не удается установить, какая из главных вычислительных машин для управления полетом формирует ошибочный сигнал. В случае применения более двух одновременно работающих вычислительных машин ошибочный сигнал может быть опознан выбором по правилу большинства и применен правильный сигнал для управления исполнительными модулями
В существующих модульных электронных системах управления полетом команды пилота задаются преимущественно вручную через элементы ввода в кабине экипажа, такие, например, как боковые ручки управления или традиционные рулевые колонки для осей крена и тангажа или педали для оси рыскания, преобразуются электронными датчиками положения в электрические, преимущественно двукратно избыточные сигналы и подаются в исполнительные электронные блоки управления в виде заданных значений.
Предпочтительно, чтобы при этом каждому исполнительному электронному блоку управления было придано несколько избыточных электронных датчиков положения, чем достигается модульное исполнение и в кабине экипажа. И лишь разные элементы ввода должны содержать одинаковое количество пар датчиков.
Исполнительные электронные блоки управления и главные вычислительные машины для управления полетом состоят, само собой разумеется, из цифровых процессоров с соответствующим программным обеспечением.
Предпочтительно, чтобы главные вычислительные машины для управления полетом были связаны с помощью системы шин с исполнительными электронными блоками управления для упрощения модульной конструкции, расширения системы и обеспечения надежной и быстрой связи.
Также предпочтительно, чтобы исполнительные электронные блоки управления были связаны между собой через систему шин также для упрощения модульной конструкции, расширения системы и обеспечения надежной и быстрой связи.
Предпочтительно, чтобы в главные вычислительные машины для управления полетом заданные пилотом значения поступали через исполнительные электронные блоки управления, в результате чего для приема заданных пилотом значений главным вычислительным машинам управления полетом потребуется только эта связь.
Исполнительные модули содержат гидравлические, электрические или электрогидравлические приводы, для управления которыми исполнительные электронные блоки управления могут включать в себя цифроаналоговые преобразователи.
При этом также возможно, чтобы исполнительные модули сами содержали указанные электронные преобразователи и получали управляющие команды от исполнительных электронных блоков управления.
Примеры выполнения настоящего изобретения подробнее поясняются ниже с помощью чертежей, на которых изображено:
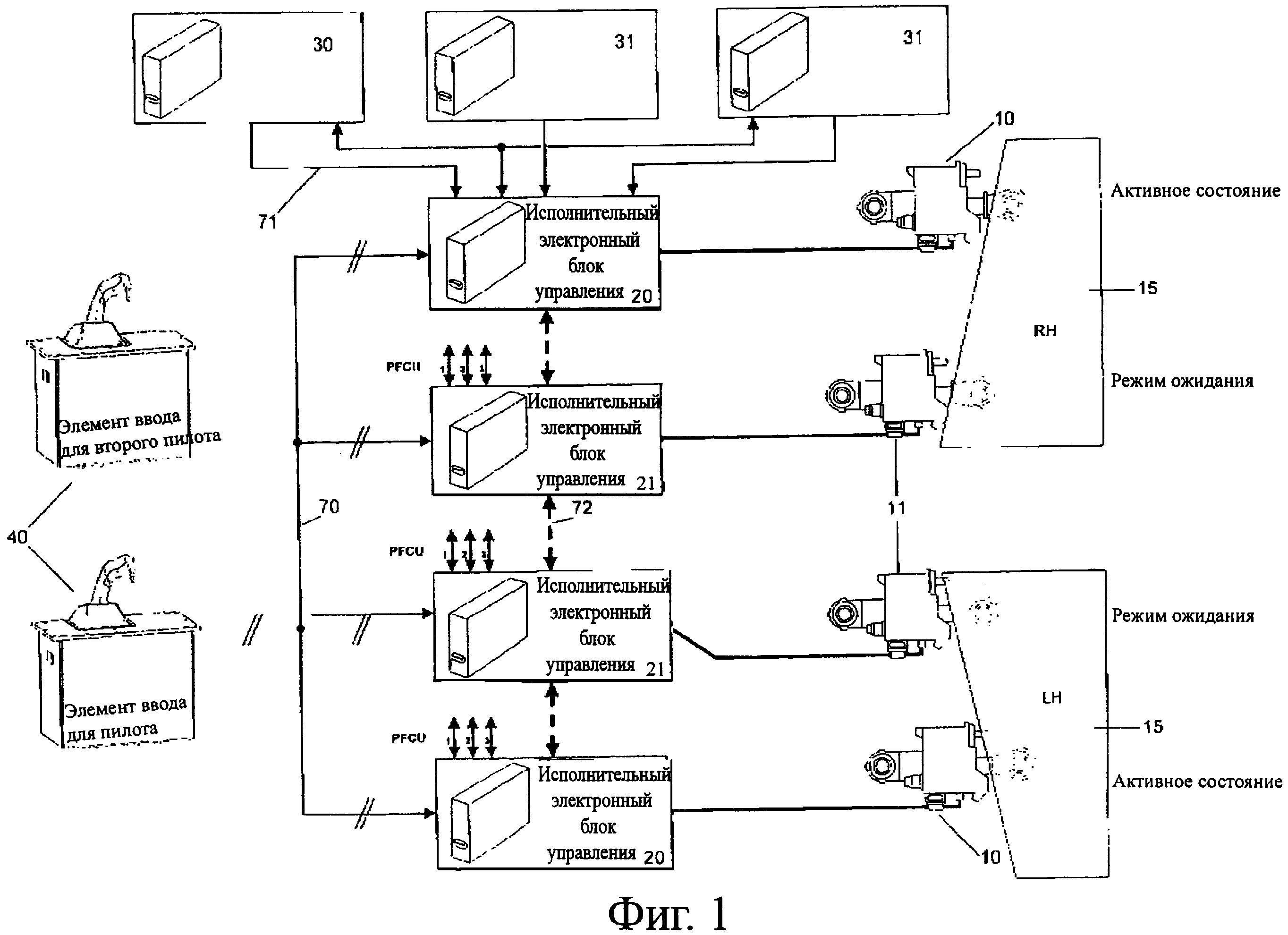
фиг.1 - в схематическом виде первый пример выполнения модульной электронной системы управления полетом согласно изобретению;
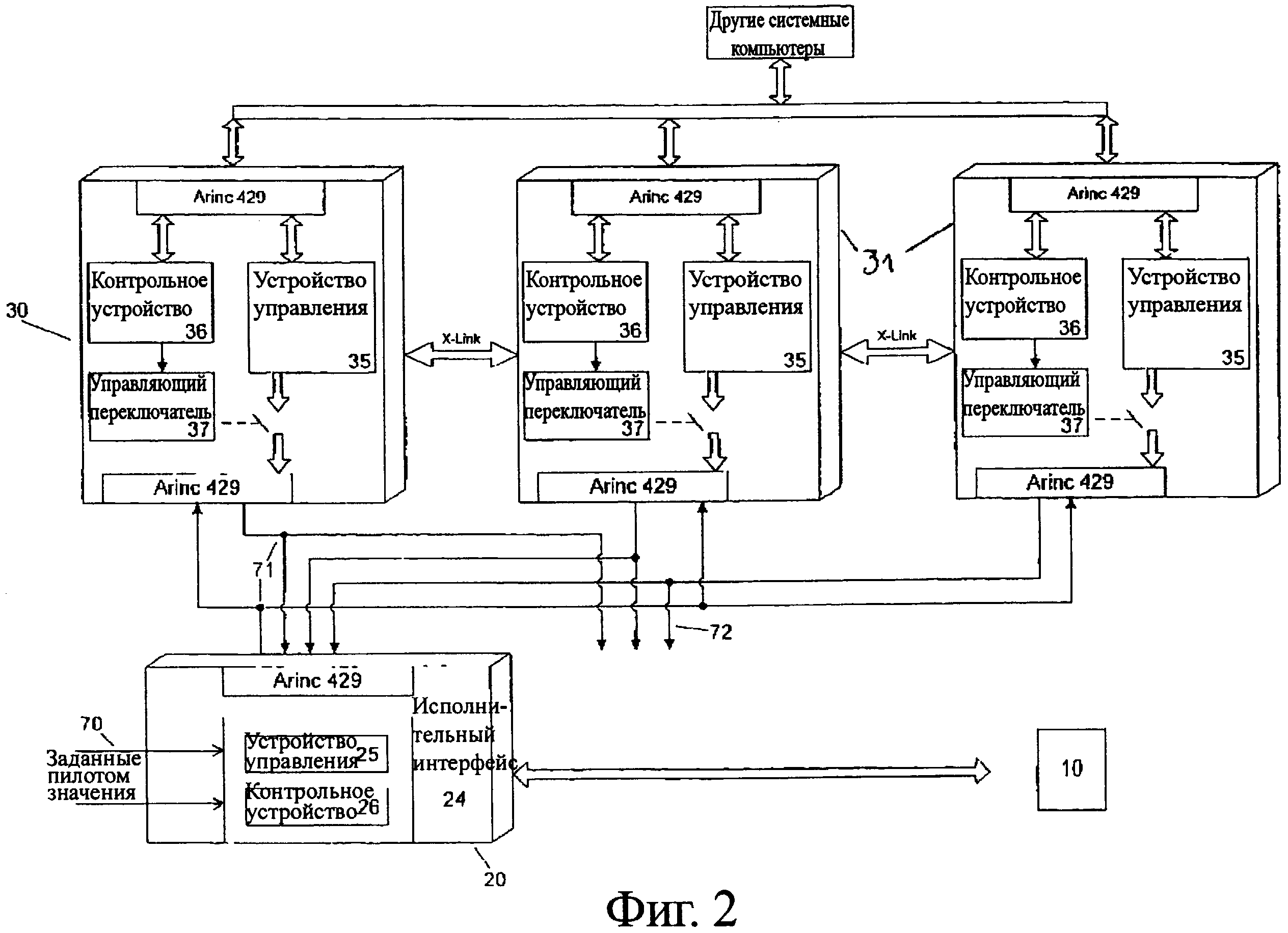
фиг.2 - в схематическом виде пример выполнения исполнительного электронного блока управления и главной вычислительной машины для управления полетом согласно изобретению;
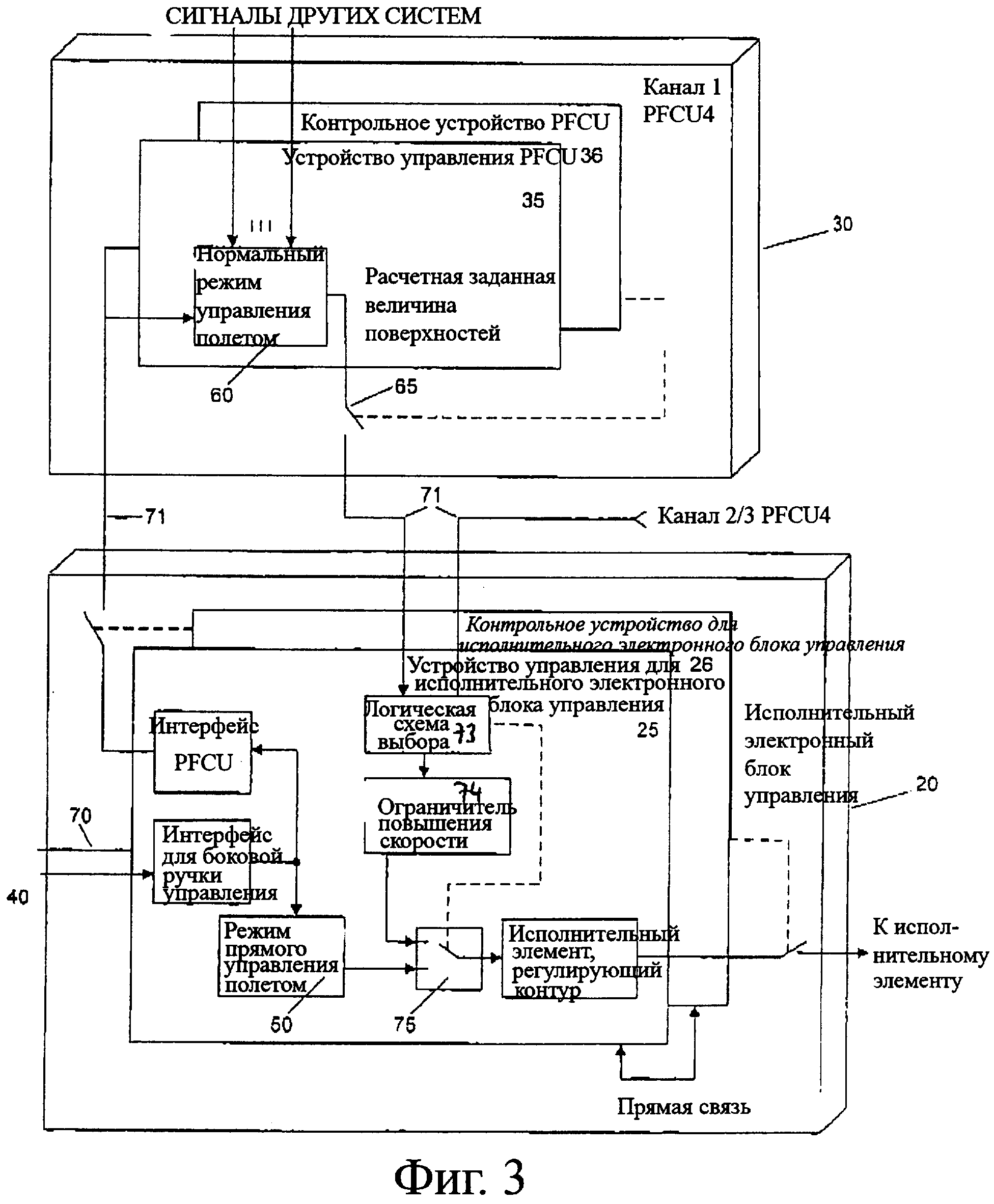
фиг.3 - в другом схематическом виде пример выполнения исполнительного электронного блока управления и главной вычислительной машины для управления полетом согласно изобретению;
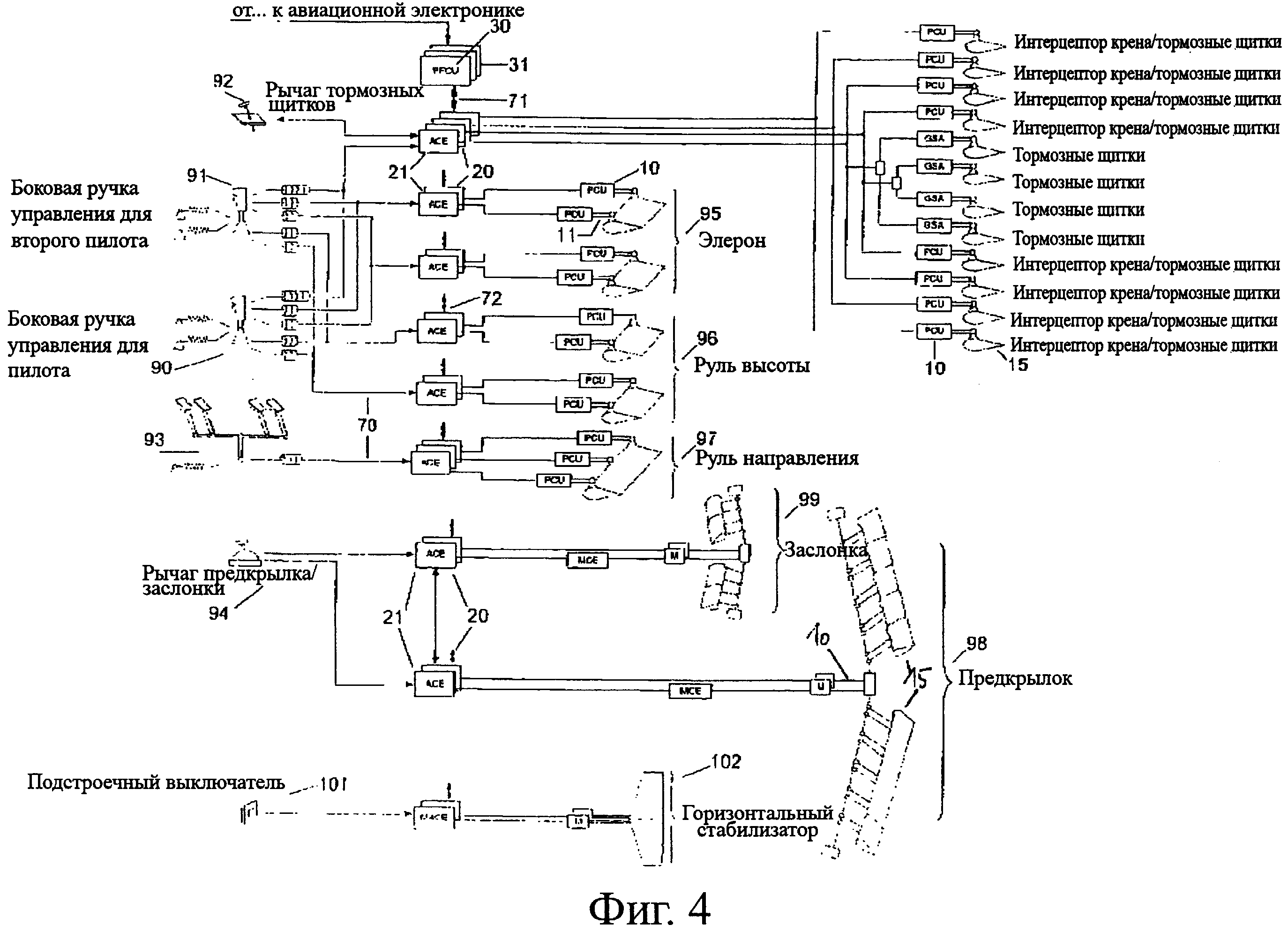
фиг.4 - в схематическом виде общее изображение модульной электронной системы управления полетом согласно изобретению.
На фиг.1 показан первый пример выполнения модульной электронной системы управления полетом согласно изобретению. Системой управляют пилот и второй пилот, вводя вручную через элементы ввода 40 заданные величины. В качестве элементов ввода 40 в первом примере выполнения используются так называемые боковые ручки управления, с помощью которых возможно выполнение сложных заданных значений по управлению. Само собой разумеется, что возможны и другие элементы ввода, которые также могут подключаться к модульной электронной системе управления полетом и которые приводят в действие другие исполнительные элементы. В целях упрощения, в первом примере выполнения показан только этот один элемент ввода 40, предназначенный для пилота и второго пилота. В этих элементах ввода 40 вводимые вручную заданные значения преобразуются электронными датчиками положения в электрические сигналы, причем в первом примере выполнения применяются дуплексные избыточные электрические сигналы. В данном случае элементы ввода 40 служат для управления поверхностями управления 15, движением которых может управляться самолет.
Дуплексные избыточные управляющие сигналы поступают от элементов ввода 40 по сигнальным шинам 70 в исполнительные электронные блоки управления 20, 21. При этом каждый из исполнительных электронных блоков управления 20, 21 обеспечивает точное управление исполнительным модулем 10 или 11.
Рассматриваемый пример выполнения модульной электронной системы управления полетом согласно изобретению характеризуется многократной избыточностью. Для этого на каждую поверхность управления 15 воздействуют два исполнительных модуля 10, 11, управляемые двумя разными исполнительными электронными блоками управления 20, 21. При этом исполнительные электронные блоки управления 20 отличаются от таких же блоков 21 как структурой аппаратного обеспечения, так структурой программного обеспечения. Благодаря этому достигается положение, при котором одновременно не могут произойти одинаковые сбои, которые могли бы привести в обоих исполнительных электронных блоках управления к выходу из строя и, следовательно, отключению. Оба исполнительных модуля 10, 11 способны самостоятельно управлять поверхностью 15 управления, однако в активном состоянии пребывает только один исполнительный модуль. Другой же исполнительный модуль, в данном случае это - модуль 11, находится в спящем резервном режиме.
Если в исполнительном электронном блоке 20, управляющем активным исполнительным модулем 10, обнаружится дефект, то исполнительный электронный блок управления 20 перейдет в пассивный режим, в котором исполнительный модуль 10 переключится в спящий резервный режим. Тогда исполнительный электронный блок управления 21 переключит управляемый им исполнительный модуль 11 в активный режим, в котором поверхность управления 15 будет управляться исполнительным электронным блоком 21 и исполнительным модулем 11. При этом исполнительные электронные блоки управления 20, 21 связаны между собой системой 72 шин, в результате чего находящийся в режиме ожидания исполнительный электронный блок управления обнаружит дефект в активном исполнительном электронном блоке управления и возьмет на себя управление.
Кроме того, в примере выполнения исполнительные электронные блоки управления 20, 21 связаны с главными вычислительными машинами для управления полетом 30, 31 через систему 72 шин. С одной стороны, главные вычислительные машины 30, 31 для управления полетом получают заданные пилотом значения через исполнительные электронные блоки управления 20, 21, с другой стороны, главные вычислительные машины 30, 31 для управления полетом направляют уставки обратно в исполнительные электронные блоки управления.
В режиме прямого управления полетом непосредственно заданные пилотом значения поступают в исполнительные электронные блоки управления 20, 21 от элементов ввода 40, в то время как в нормальном режиме управления полетом уставки поступают от главных вычислительных машин для управления полетом 30, 31 для управления исполнительными модулями 10, 11. При этом главные вычислительные машины 30, 31 для управления полетом выполняют расчеты всех регулирующих функций нормального режима управления полетом. Для этого заданные пилотом значения поступают в исполнительные электронные блоки управления, модулируются посредством разных статических и динамических параметров положения и ситуации во время полета в заданные регулирующие законы и в виде уставок снова поступают в исполнительные электронные блоки управления. Объем и тип регулирующих законов являются вследствие переменного прикладного программного обеспечения главных вычислительных машин для управления полетом совершенно производными и заново определяются от самолета к самолету на основе аэродинамических и функциональных требований.
Первый пример выполнения согласно изобретению реализуется следующим образом.
После подключения линий электрического и гидравлического питания исполнительные электронные блоки управления 20 приводят управляемые ими исполнительные модули 10, прежде всего в активный режим, в то время как исполнительные электронные блоки управления 21 поддерживают свои исполнительные модули 11 в режиме ожидания. Для обеспечения быстрого и надежного переключения между активным и ожидающим режимами исполнительные электронные блоки управления 20 и 21 связаны между собой, в частности, те из них, которые управляют одинаковой поверхностью управления 15, связаны через систему 72 шин, в данном случае через систему шин ARINC 429.
Если в активном исполнительном модуле 10 возникают гидравлические или электрические проблемы, то это обнаруживает управляющий исполнительный электронный блок 20 через соответствующие контрольные функции, который посылает через систему 72 шин соответствующее сообщение в другой исполнительный электронный блок управления 21. Этот блок переключает свой исполнительный модуль 11 в активный режим. Если и во втором исполнительном модуле 11 возникает проблема, то первый исполнительный электронный блок управления 20 может быть снова переведен в активный режим при условии устранения появившейся ранее проблемы.
На фиг.2 более точно показано конструктивное устройство главных вычислительных машин 30, 31 для управления полетом и исполнительных электронных блоков управления 20 в первом примере выполнения. При этом исполнительный электронный блок управления 20 получает от не показанных элементов ввода 40 по сигнальным шинам 70 заданные пилотом значения в электронном виде. Для обработки этих сигналов исполнительный электронный блок управления 20 содержит контрольно-мониторную структуру, состоящую из устройства управления 25 и контрольного устройства 26. Благодаря этому исполнительный электронный блок управления 20 является дуплексным, избыточным и автоматически обнаруживающим дефекты, так как контрольное устройство 26 опознает дефекты в устройстве управления 25. При обнаружении дефекта исполнительный электронный блок управления 20 переходит в надежное пассивное состояние, переключает подключенный к нему исполнительный модуль 10 в спящий резервный режим и посылает сообщение в другой исполнительный электронный блок управления 21. При этом устройство управления 25 и контрольное устройство 26 выполнены разными как в отношении программного обеспечения, так и в отношении аппаратного обеспечения. Благодаря таким несхожим структурам исключаются не опознанные дефектные свойства исполнительного электронного блока управления вследствие одинакового сбоя (Common-Mode). Исполнительный модуль 10 управляется исполнительным электронным блоком управления 20 через исполнительный интерфейс 24, связь с другими исполнительными электронными блоками управления 21 и главными вычислительными машинами для управления полетом обеспечивается через систему 71, 72 шин.
Главные вычислительные машины для управления полетом 30, 31 также имеют контрольно-мониторную архитектуру, состоящую из устройства управления 35 и контрольного устройства 36. Также и эти оба устройства выполнены разными в отношении программного и аппаратного обеспечения, в результате чего исключаются не опознанные дефектные свойства вследствие одинакового сбоя. В противоположность исполнительным электронным блокам управления 20, 21, характеризующимся в данном примере выполнения несхожей структурой программного и аппаратного обеспечения, все главные вычислительные машины 30, 31 для управления полетом имеют одинаковое строение. При этом главные вычислительные машины 30, 31 для управления полетом могут применяться в разном количестве. Поскольку все они имеют одинаковую конструкцию, то конструкторские расходы не возрастают вследствие применения нескольких параллельно работающих главных вычислительных машин для управления полетом, благодаря чему количество этих главных вычислительных машин 30, 31 для управления полетом может быть увеличено для обеспечения избыточности системы, при этом конструкторские затраты пропорционально не возрастают. Главные вычислительные машины 30, 31 для управления полетом связаны между собой через X-LINK или же систему шин, через которую они могут быть также связаны с другими системными компьютерами самолета. Эти системы содержат, например, самописец полета, автопилот, инерциальную платформу и индикаторную систему в кабине экипажа.
Если вследствие дефектов из строя выходит устройство управления 35, то это замечает контрольное устройство 36 и через управляющий переключатель 37 может прервать подачу уставок. Главные вычислительные машины 31 для управления полетом продолжают выполнять задания нормального режима управления полетом. Если же и они выходят из строя, то возможно переключение с помощью логической схемы выбора исполнительных электронных блоков управления 20 в режим прямого управления полетом.
На фиг.3 показан пример выполнения главной вычислительной машины 30 для управления полетом и исполнительных электронных блоков управления 20, причем, в частности, показано переключение с нормального режима управления полета на режим его прямого управления. По сигнальным шинам 70 заданные пилотом значения поступают в исполнительные электронные блоки управления 20 от элементов ввода 40, в данном случае от боковой ручки управления. Эти заданные пилотом значения, с одной стороны, дополнительно обрабатываются с помощью функций режима 50 прямого управления полетом и, с другой стороны, направляются через систему 71 шин в главную вычислительную машину 30 для управления полетом.
Здесь выполняются функции нормального режима 60 управления полетом, которые модулируют заданные пилотом значения с помощью разных статических и динамических параметров положения и ситуации во время полета в определенные регулирующие законы и таким образом формируют уставки для исполнительных электронных блоков управления. Это происходит как в устройстве управления 35, так и в контрольном устройстве 36, в результате чего оба значения могут сравниваться между собой, и при выявлении ошибок главная вычислительная машина 30 может быть приведена с помощью выключателя 65 в надежное пассивное состояние.
Уставки, рассчитанные в нормальном режиме 60 управления полетом, снова направляются обратно в исполнительные электронные блоки управления 20 по системе 71 шин. Исполнительный электронный блок управления 20 получает также уставки от других главных вычислительных машин 31 для управления полетом. С помощью логической схемы выбора 70 определяется, содержат ли уставки, образованные главными вычислительными машинами 30, 31 для управления полетом, погрешности. Если сигнал опознается как правильный, то после своего прохождения через ограничитель 71 повышения скорости он используется с помощью выключателя 75 для управления исполнительным модулем 10. Если же от главных вычислительных машин 30, 31 не поступила правильная уставка, то логическая схема выбора 70 устанавливает переключатель 75 в такое положение, в котором для управления исполнительным модулем 10 используются параметры режима прямого управления полетом.
Этот режим прямого управления полетом включает в себя все функции, которые являются критическими в отношении безопасности во время управления самолетом. При выходе из строя главных вычислительных машин 30, 31 для управления полетом или при наличии дефектов в этих вычислительных машинах самолет может надежно управляться в режиме 50 прямого управления полетом. За переключателем 75 предусмотрено устройство управления 76 для регулирования положения исполнительного модуля, в котором используются сигналы либо режима 50 прямого управления полетом, либо нормального режима 60 управления полетом в качестве уставки для определения положения исполнительного элемента.
В исполнительном электронном блоке управления 20 также предусмотрены устройство управления 25 и контрольное устройство 26, выполненные с разным программным и аппаратным обеспечением и осуществляющие взаимный контроль.
На фиг.4 показана установка полностью, в то время как на фиг.1 показана только деталь по оси управления.
Для каждого элемента ввода 40, такого, например, как боковая ручка управления 90 для пилота и 91 для второго пилота, рычаг 92 тормозных щитков, рычаг 93 бокового руля, рычаг 94 предкрылка и заслонки и подстроечный переключатель 101, предусмотрен, по меньшей мере, один исполнительный электронный блок управления 20 или 21.
В целях повышения безопасности каждому элементу ввода 40 придано, как правило, несколько одновременно работающих исполнительных электронных блоков управления, которые совместно с управляемыми ими исполнительными модулями воздействуют на одну и ту же поверхность управления. В частности, для управления элеронами 95, рулями высоты 96, заслонками 99, предкрылками 98 и горизонтальными стабилизаторами 102 предусмотрено два не похожих исполнительных электронных блока управления 20, 21. Для управления рулями направления 97 предусмотрено даже три одновременно работающих исполнительных электронных блока управления.
Эти исполнительные электронные блоки управления 20, 21 связаны между собой с помощью системы 72 шин, в результате чего в случае выхода из строя одного из исполнительных электронных блоков управления 20 или подключенного к нему исполнительного модуля 10 в активное состояние может быть переведен другой, воздействующий на ту же поверхность управления исполнительный модуль 11 через другие исполнительные электронные блоки управления 21.
Кроме того, исполнительные электронные блоки управления 20, 21 связаны также через систему 71 шин с главными вычислительными машинами 30, 31 для управления полетом, которые в нормальном режиме управления полетом решают комплексные задачи по управлению полетом и на основе заданных пилотом значений, которые они получают через исполнительные электронные блоки управления, направляют уставки обратно в эти блоки.
Устройство контроля за синхронностью закрылков самолетного крыла
Устройство по меньшей мере с одним резистором птк
Сенсорная система для контроля синхронного хода рулевых поверхностей самолета
Способ соединения гофрированного шланга с корпусом, система с гофрированным шлангом и соединенным с ним корпусом и воздушное средство сообщения, по меньшей мере, с одной указанной системой
Привод ходового винта
Привод ходового винта
Установочное устройство для позиционирования конструктивного элемента
Сервоклапан
Контроль состояния сервопривода в летательном аппарате
Электронный блок для периферийных приборов летательного аппарата
Устройство контроля за синхронностью закрылков самолетного крыла
Устройство по меньшей мере с одним резистором птк
Сенсорная система для контроля синхронного хода рулевых поверхностей самолета
Способ соединения гофрированного шланга с корпусом, система с гофрированным шлангом и соединенным с ним корпусом и воздушное средство сообщения, по меньшей мере, с одной указанной системой
Привод ходового винта
Привод ходового винта
Установочное устройство для позиционирования конструктивного элемента
Сервоклапан

