Результат интеллектуальной деятельности: СЕНСОРНАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ СИНХРОННОГО ХОДА РУЛЕВЫХ ПОВЕРХНОСТЕЙ САМОЛЕТА
Вид РИД
Изобретение
Изобретение относится к сенсорной системе для контроля синхронного хода рулевых поверхностей самолета с двумя передающими трактами для механической передачи движений одной или нескольких рулевых поверхностей, по меньшей мере, на один датчик.
Такие сенсорные системы используются для контроля корректного функционирования рулевых поверхностей, в частности на крыльях самолета. При этом для воздействия на коэффициенты подъемной силы и сопротивления крыльев самолеты оборудованы рулевыми поверхностями, такими как предкрылки и посадочные закрылки, которые изменяют аэродинамические свойства крыльев так, что самолет для взлета и посадки обладает характеристиками полета на малых скоростях, тогда как при полете в крейсерском режиме нужные скоростные полетные характеристики достигаются за счет соответствующего позиционирования рулевых поверхностей, таких как предкрылки и посадочные закрылки.
Сбои в приводной системе этих рулевых поверхностей могут привести к так называемым «skewing» (перекос), «misalignment» (несоосность) или «loss» (отрыв) отдельных сегментов рулевых поверхностей, что нежелательным образом ухудшает аэродинамические свойства крыльев. В частности, после отрыва отдельных сегментов рулевых поверхностей могут возникнуть нежелательные моменты крена или рыскания.
Чтобы своевременно обнаружить сбои такого рода и остановить процесс повреждений, известны сенсорные системы, которые должны своевременно обнаруживать перекосы, ошибки в синхронности или потерю отдельных сегментов рулевых поверхностей. При обнаружении ошибки вырабатывается сигнал, который приводит к остановке приводной системы и подает экипажу соответствующий предупредительный сигнал.
Из US 4686907 известна сенсорная система, в которой на изогнутой связи, которая проходит по направляющим роликам и при движении вызывает дугообразное движение закрылка, нанесены метки. Во время движения связи эти метки проходят мимо расположенных сбоку датчиков и вырабатывают сигналы, посредством которых можно определить положение закрылка. Система имеет многостороннее применение, однако требует большого числа датчиков.
Из US 5680124 известна сенсорная система, в которой внутри ряда расположенных рядом друг с другом закрылков крыла установлена тросовая тяга. Ее концы закреплены на первом и последнем закрылках, так что длина этой тросовой тяги остается постоянной, когда все закрылки движутся синхронно. Асинхронное движение соседних закрылков, напротив, увеличивает длину тросовой тяги, что определяется соответствующим датчиком. Однако эта система позволяет обнаружить только асинхронное движение соседних закрылков, тогда как нарушение движения внутренних и внешних концов закрылков не обнаруживается. Также с помощью этого устройства невозможен контроль отдельного закрылка.
Кроме того, крылья современных гражданских самолетов зачастую имеют уменьшающуюся изнутри наружу глубину (трапециевидные крылья), в результате чего для посадочных закрылков и предкрылков возникают часто разные пути перемещения, т.е. внутренние закрылки выдвигаются дальше, чем внешние. Существуют также устройства, которые требуют различных путей перемещения приводных систем отдельного закрылка. Однако такие отличия заданных путей перемещения закрылков не могут быть определены известными системами или могут быть определены только с большими затратами.
Поэтому задачей изобретения является создание сенсорной системы для контроля синхронного хода рулевых поверхностей самолета, которая могла бы иметь разнообразное применение с небольшими конструктивными затратами и, в частности, могла бы также определять различные заданные пути перемещения рулевых поверхностей. Кроме того, должен быть возможен надежный контроль синхронного хода, причем, в частности, желательна самоконтролирующая конструкция.
Согласно изобретению, эта задача решается посредством сенсорной системы, охарактеризованной признаками п.1 формулы. Такая сенсорная система для контроля синхронного хода рулевых поверхностей самолета содержит два передающих тракта для механической передачи движения одной или нескольких рулевых поверхностей на датчик, причем оба передающих тракта связаны между собой механически и/или, по меньшей мере, одним датчиком, благодаря чему можно контролировать разницу между передаваемыми посредством передающих трактов движениями. За счет использования двух механических передающих трактов можно простым и надежным образом контролировать синхронный ход одной или нескольких рулевых поверхностей путем контроля разницы между передаваемыми посредством передающих трактов движениями. Чтобы обеспечить это измерение разницы, два передающих тракта связаны между собой механически и/или, по меньшей мере, одним датчиком, так что становится возможным конструктивно простой и надежный контроль. В частности, можно отказаться от большого числа датчиков. Кроме того, система является самоконтролирующей, поскольку обрыв одного из обоих передающих трактов определяется как ошибка.
Механические передающие тракты могут передавать движение отдельных или нескольких зон единственной рулевой поверхности, так что, например, путь перемещения одной рулевой поверхности в левой зоне можно сравнить с путем перемещения той же рулевой поверхности в правой зоне. В качестве альтернативы оба передающих тракта могут воздействовать также на разные рулевые поверхности, так что можно контролировать синхронный ход двух рулевых поверхностей.
Предпочтительным образом связь передающих трактов осуществляется посредством одного или нескольких вращающихся связующих элементов. За счет преобразования поступательного движения рулевых поверхностей во вращательное движение значительно упрощается контроль разницы между передаваемыми посредством передающих трактов движениями, причем вращающиеся связующие элементы требуют к тому же лишь небольшого конструктивного пространства.
Предпочтительно, различные заданные пути перемещения компенсируются за счет соответствующих различных передаточных отношений движений, передаваемых посредством передающих трактов на один или несколько связующих элементов. Если рулевые поверхности имеют за счет описанной выше уменьшающейся глубины крыльев различные заданные пути перемещения в разных местах одной или нескольких рулевых поверхностей, то это можно определить за счет того, что движения, передаваемые с этих мест рулевых поверхностей посредством передающих трактов, передаются с различными передаточными отношениями на один или несколько связующих элементов. За счет соответствующей настройки передаточных отношений можно автоматически определить желаемую разницу путей, которая возникает при ошибочном движении рулевых поверхностей. За счет разных передаточных отношений можно обеспечить, чтобы контролируемая датчиком разница при отсутствии сбоя была равна нулю и только в случае сбоя отличалась от нуля. Благодаря этому чисто механическим путем возможно простое согласование предложенной сенсорной системы с самыми различными задачами и рулевыми поверхностями. В частности, можно отказаться от сложной обрабатывающей электроники, поскольку компенсация разных путей перемещения может достигаться чисто механическим путем.
Предпочтительно, оба передающих тракта воздействуют на два движущихся навстречу друг другу связующих элемента, относительное движение которых контролируется датчиком. За счет этого требуется использовать только один датчик, который контролирует синхронный ход. Отклонения от заданного пути перемещения рулевых поверхностей приводят к относительному движению между обоими движущимися навстречу друг другу связующими элементами, которое можно определить просто и надежно.
В качестве альтернативы оба передающих тракта могут воздействовать также на один, жесткий сам по себе связующий элемент, при этом установлены два датчика, которые контролируют передаваемые передающими трактами усилия. При бесперебойном перемещении рулевых поверхностей оба передающих тракта движут общий связующий элемент одинаково, так что здесь возникают постоянные усилия. При асинхронном движении, напротив, по меньшей мере, один из передающих трактов нагружен более высокими или более низкими усилиями, которые затем определяются датчиками.
В одном предпочтительном варианте оба передающих тракта содержат по одной тросовой тяге. Она расположена предпочтительно так, что при движении рулевой поверхности или рулевых поверхностей длина тросовой тяги изменяется. Такие тросовые тяги позволяют реализовать большое число сенсорных устройств, которые могут контролировать пути перемещения как одной, так и нескольких рулевых поверхностей.
Предпочтительно, тросы обеих тросовых тяг намотаны, по меньшей мере, одним концом на один или несколько связующих элементов, выполненных в виде барабанов. При увеличении или уменьшении пути тросовых тяг за счет движения рулевой поверхности или рулевых поверхностей тросы соответственно разматываются со связующего элемента или наматываются на него. Связующий элемент или связующие элементы расположены предпочтительно на конструкции крыла, так что путь тросовых тяг при изменении положения рулевых поверхностей относительно конструкции крыла изменяется по длине. Для этого тросы другим своим концом закреплены на соответствующей рулевой поверхности или проходят по огибным блокам вдоль рулевой поверхности или рулевых поверхностей и в другом месте закреплены на конструкции крыла. Это позволяет реализовать самые разные возможности контроля положения рулевых поверхностей.
Предпочтительно, тросовые тяги нагружены натяжением от одной или нескольких возвратных пружин одного или нескольких связующих элементов. Возвратные пружины обеспечивают повторное наматывание тросов тросовых тяг на связующие элементы, когда длина пути тросовых тяг уменьшается за счет движения рулевой поверхности. Это приводит при обрыве троса к срабатыванию датчика, так что возникает самоконтролирующая система.
Предпочтительно, обе тросовые тяги намотаны на связующий элемент или связующий элементы навстречу друг другу. За счет такой встречной намотки тросов достигается то, что изменение длины тросовых тяг при вращении связующего элемента или связующих элементов происходит одинаково, т.е. обе тросовые тяги либо удлиняются, либо укорачиваются. Это обеспечивает простой контроль разницы передаваемых обеими тросовыми тягами движений.
Предпочтительно, тросы обеих тросовых тяг намотаны на связующие элементы или участки связующих элементов разных диаметров. Связующие элементы или участки связующих элементов разных диаметров позволяют достигать разного преобразования, передаваемого тросовыми тягами продольного движения во вращательное движение связующих элементов, так что могут компенсироваться разные заданные пути перемещения. За счет разных диаметров возникает особенно простая механическая возможность, с помощью которой можно определять самые разные пути перемещения. При этом, в частности, можно отказаться от сложной обрабатывающей электроники, поскольку компенсация разных путей перемещения может достигаться только за счет разных диаметров.
В одном предпочтительном варианте выполнения тросы обеих тросовых тяг намотаны на один общий связующий элемент, причем в тросы интегрированы датчики их усилия. Общий связующий элемент обеспечивает механическую связь тросовых тяг, при которой в случае надлежащего синхронного движения рулевых поверхностей оба троса находятся в силовом равновесии с возвратной пружиной связующего элемента и равномерно нагружены ею. При асинхронном движении, напротив, один из обоих датчиков усилия тросов нагружен слабее или сильнее, за счет чего можно обнаружить ошибку. Предпочтительно, ошибка обнаруживается при этом за счет более низкой нагрузки.
Предпочтительно, датчики усилия тросов содержат пружину и датчик, контролирующий изменение длины пружины. При бесперебойной работе пружина датчика усилия троса имеет определенную длину, которая возникает за счет силового равновесия с возвратной пружиной связующего элемента. При более низкой или более высокой нагрузке пружины датчика усилия троса пружина, напротив, укорачивается или удлиняется, что определяется датчиком. Предпочтительно, ошибка обнаруживается при этом за счет укорочения пружины.
В качестве альтернативы обе тросовые тяги предпочтительно могут быть намотаны также на два отдельных связующих элемента, причем датчик контролирует разницу углов между связующими элементами. Здесь с помощью только одного датчика достигается простой контроль синхронного хода. При синхронном ходе оба связующих элемента движутся одинаково, тогда как в случае ошибки возникает разница углов между движениями обоих связующих элементов, которая определяется датчиком.
Предпочтительно, связующие элементы расположены коаксиально рядом друг с другом. За счет этого возникают простые возможности контроля разницы углов между обоими связующими элементами. Например, связующие элементы могут быть выполнены в виде блока ходовой винт/гайка, так что при разном вращении связующих элементов возникает движение подъема, которое приводит в действие датчик. Точно так же сенсорный блок может быть выполнен, например, в виде индуктивного датчика приближения, закрепленного на конструкции крыла и инкрементно определяющего синхронное движение связующих элементов за счет меток, так называемых мишеней, на их периферии посредством измерения ширины импульсов. В другом предпочтительном варианте сенсорного блока на одном связующем элементе может быть расположен датчик приближения, обнаруживающий метки на противоположном втором связующем элементе. При синхронном движении возникает постоянный «сигнал приближения мишени», прерываемый в случае ошибки.
В другом предпочтительном варианте выполнения передающие тракты передают вращательное движение, в частности, через вращающуюся трубу или гибкий вал. За счет этого возникает механически простая возможность передачи движения рулевых поверхностей к датчику. Например, вращающаяся труба или гибкий вал может через узел зубчатая рейка/зубчатое колесо передавать движение элемента рулевой поверхности.
Датчик контролирует разницу углов между передаваемыми посредством передающих трактов вращательными движениями. Аналогично варианту с двумя отдельными связующими элементами можно таким простым образом определить асинхронность передаваемых передающими трактами движений.
Для компенсации разных заданных путей перемещения на обоих передающих трактах предпочтительно предусмотрены редукторы с разными передаточными отношениями. Также за счет этого возникает простая механическая возможность согласования предложенной сенсорной системы с самыми разными путями перемещения.
Предложенная сенсорная система может использоваться для большого числа расположений рулевых поверхностей, причем за счет предложенного измерения разницы можно контролировать синхронный ход самых разных элементов.
Так, передающие тракты могут передавать происходящие в разных местах движения одной рулевой поверхности. Этим можно, например, контролировать, движется ли одна сторона рулевой поверхности синхронно с ее другой стороной. В частности, если для движения рулевой поверхности предусмотрены несколько приводов, то можно контролировать их надлежащее функционирование.
В качестве альтернативы передающие тракты передают движения, по меньшей мере, двух разных рулевых поверхностей, в частности, по меньшей мере, двух симметрично подвижных рулевых поверхностей. Так, например, можно контролировать синхронный ход двух рулевых поверхностей, расположенных на обоих крыльях симметрично продольной оси самолета.
Кроме того, предпочтительным образом каждый передающий тракт может передавать также движение нескольких рулевых поверхностей. Это может осуществляться, в частности, за счет того, что одна тросовая тяга пропускается через несколько рулевых поверхностей, благодаря чему также могут контролироваться асинхронные движения рулевых поверхностей между собой.
Изобретение более подробно поясняется чертежами, на которых представлено следующее:
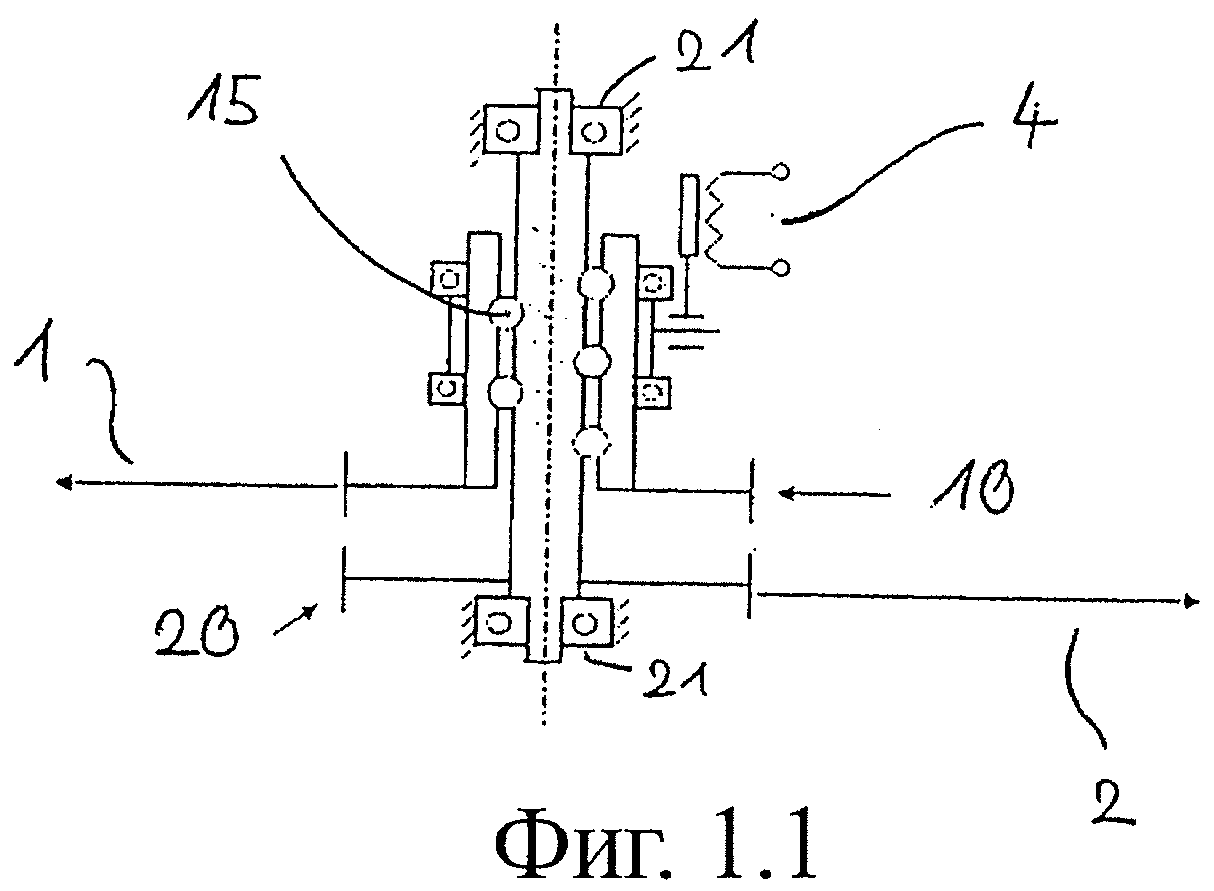
фиг.1.1 - горизонтальный разрез сенсорного устройства, согласно первому варианту выполнения;
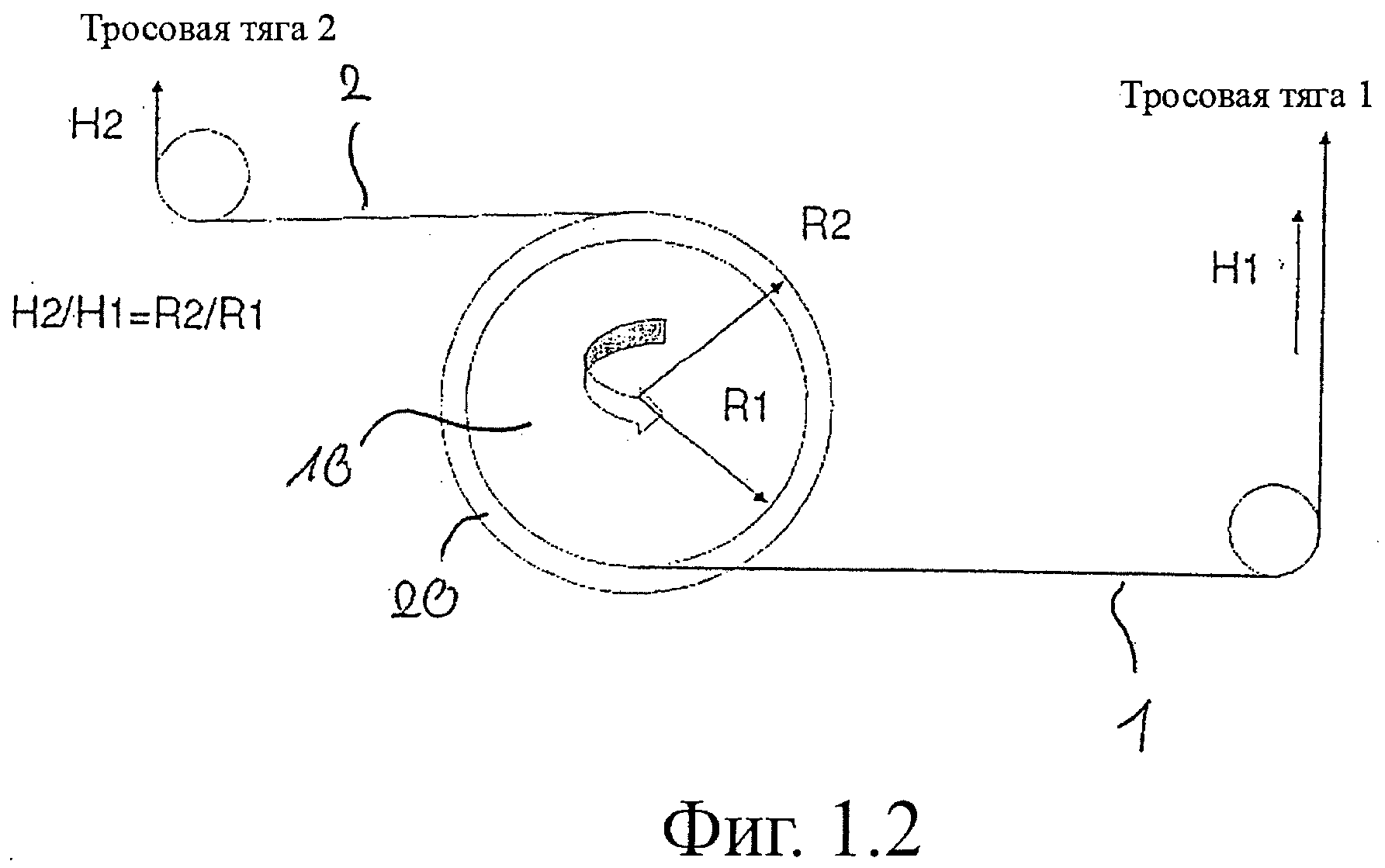
фиг.1.2 - вертикальный разрез сенсорного устройства, согласно первому варианту выполнения;
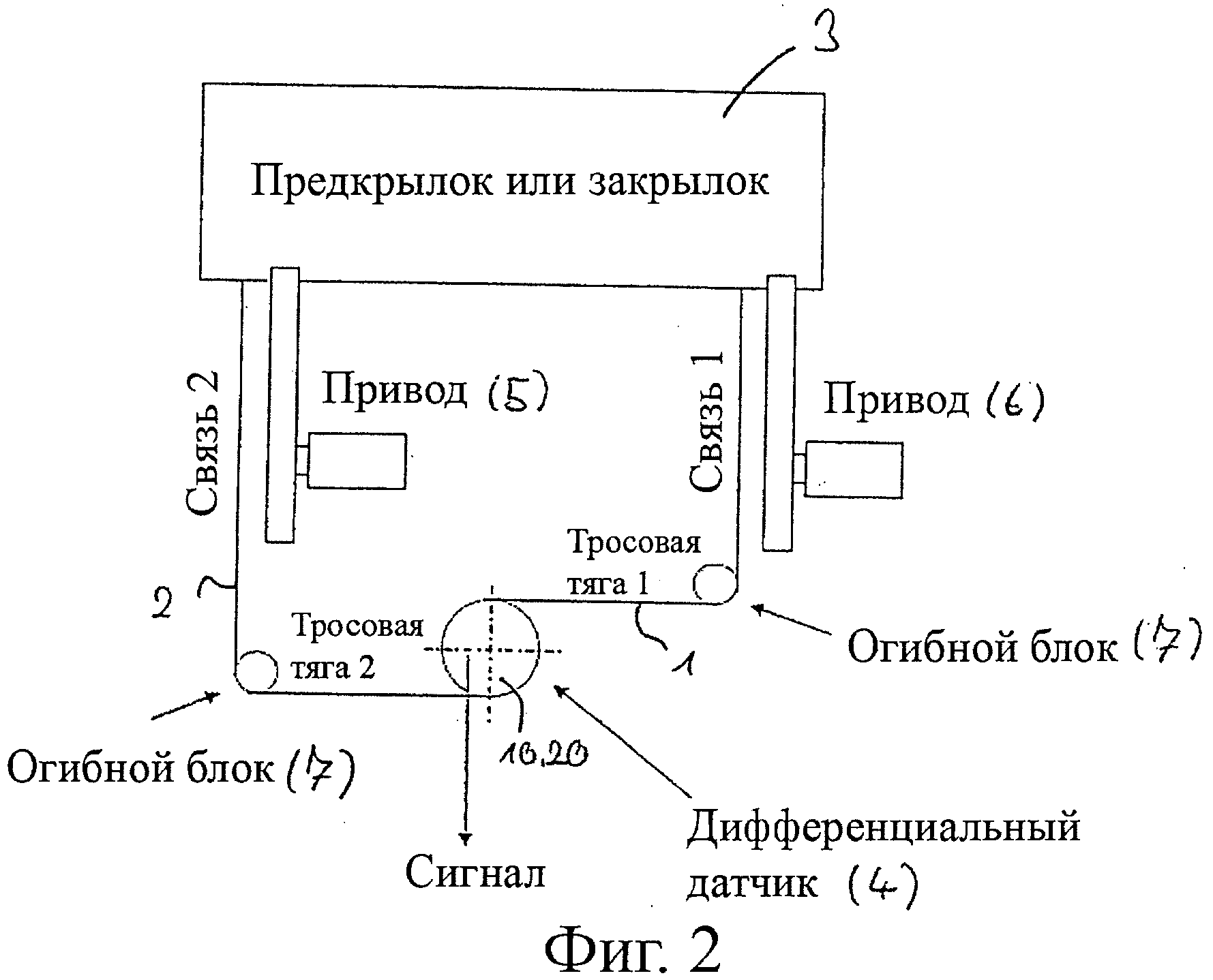
фиг.2 - сенсорная система, используемая на единственной рулевой поверхности;
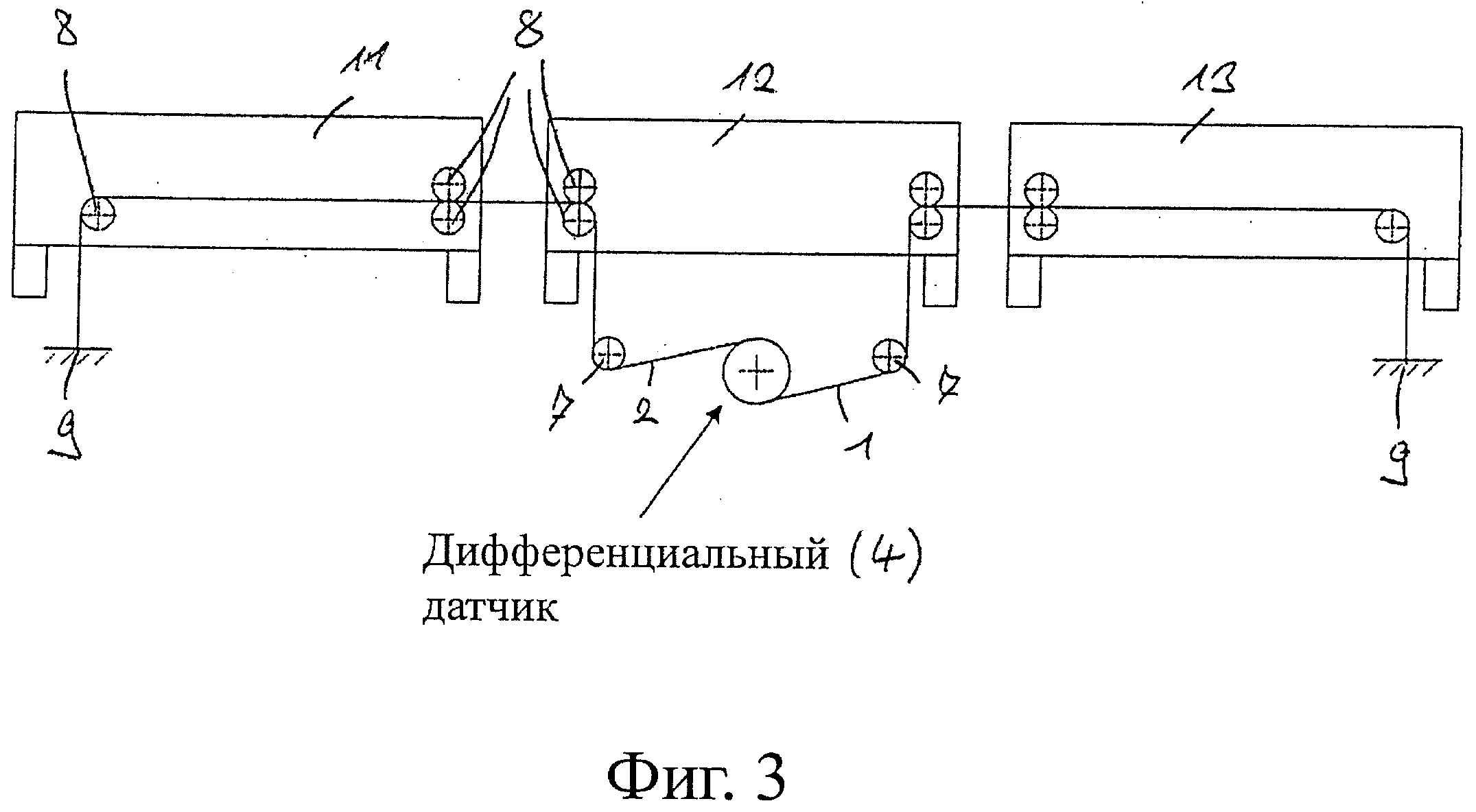
фиг.3 - сенсорная система, используемая с несколькими рулевыми поверхностями;
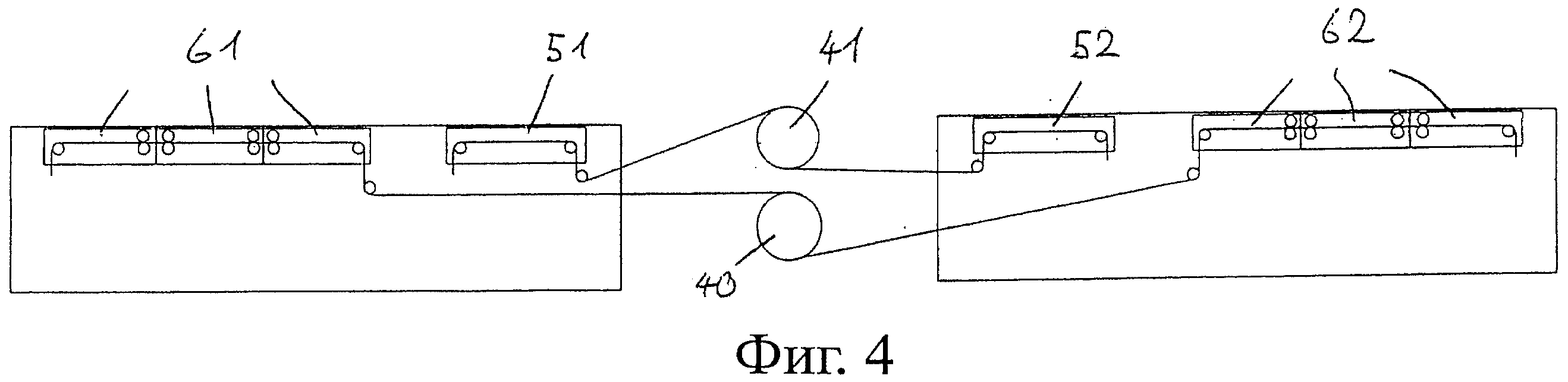
фиг.4 - два примера выполнения сенсорной системы, используемой с несколькими рулевыми поверхностями каждая;
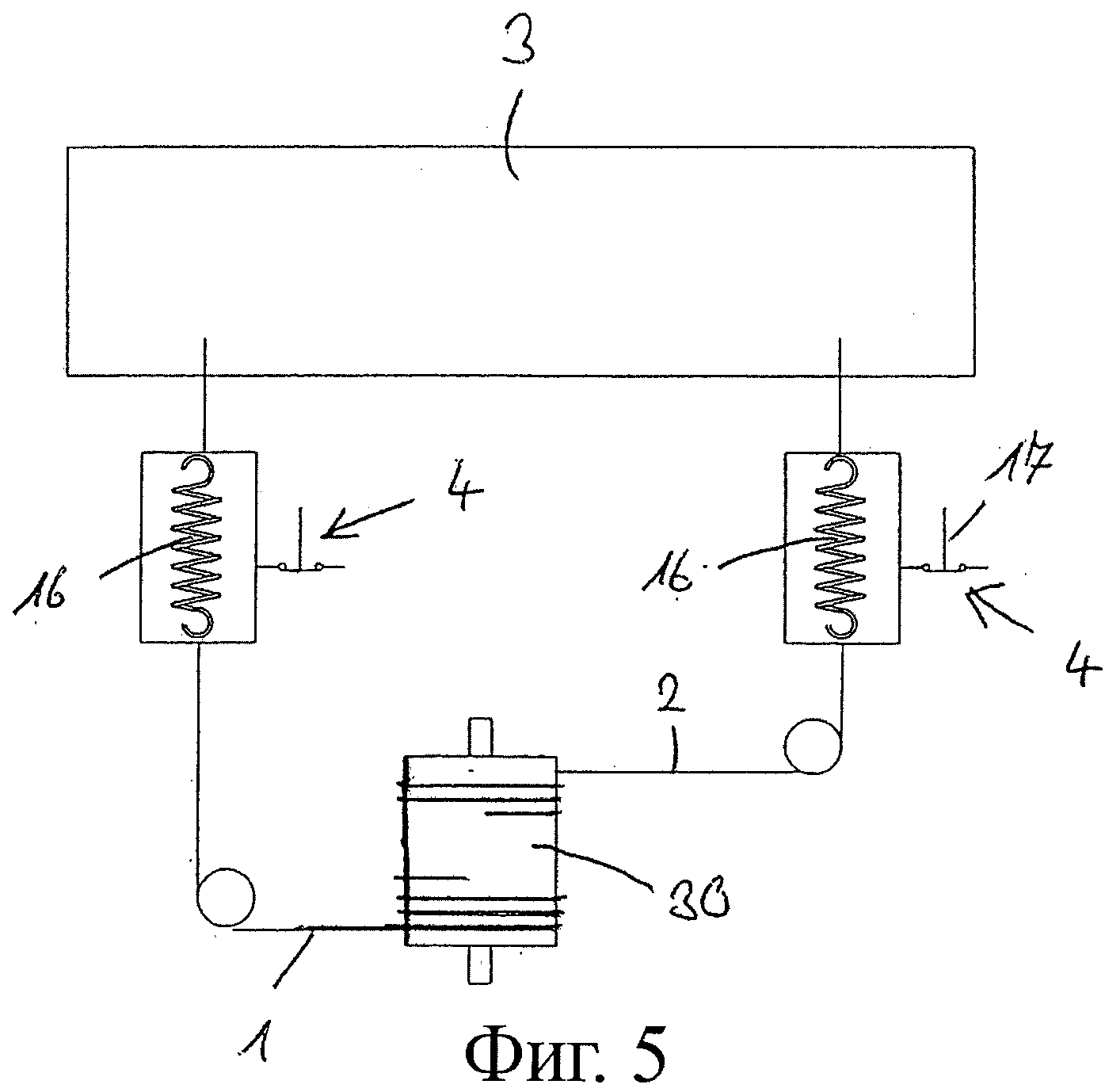
фиг.5 - второй предпочтительный вариант выполнения сенсорного блока;
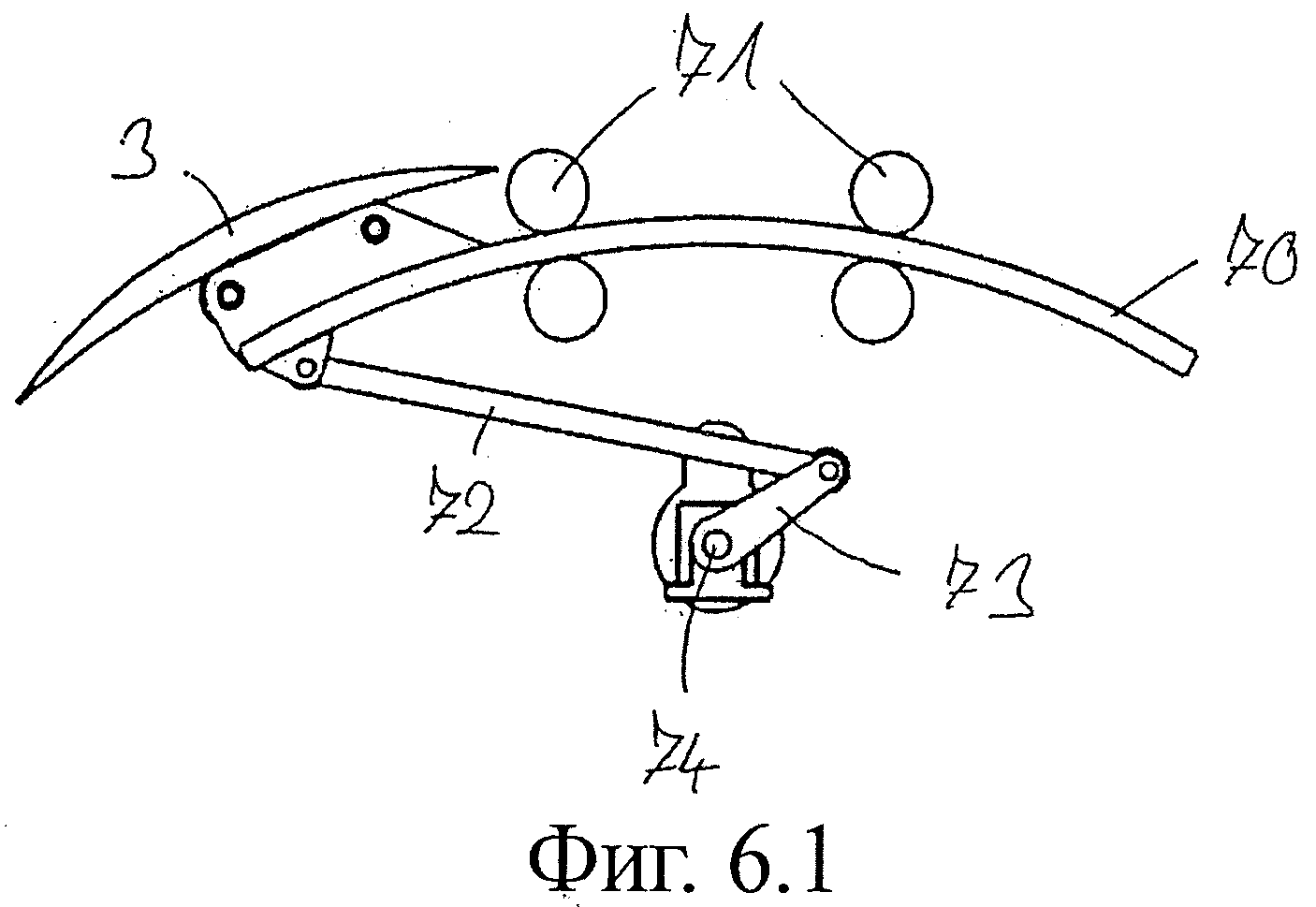
фиг.6.1 - вид сбоку согласно третьему предпочтительному варианту выполнения сенсорного блока;
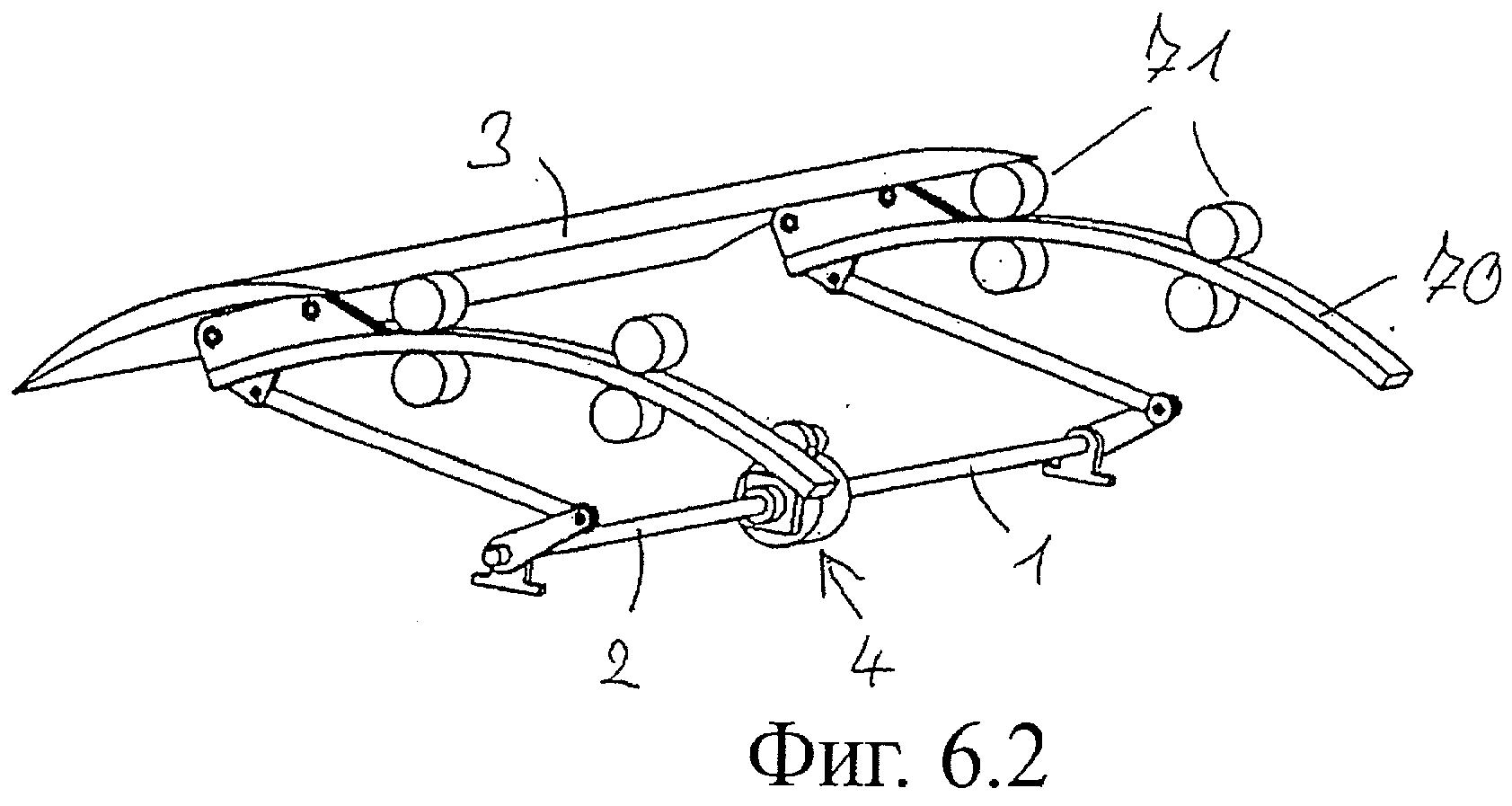
фиг.6.2: вид в перспективе третьего предпочтительного варианта выполнения сенсорного блока.
Показанный на фиг.1.1 и 1.2 первый вариант выполнения предложенного сенсорного блока основан, в основном, на непосредственном измерении разницы путей с помощью только одного датчика 4. При этом предусмотрены два передающих тракта 1, 2, выполненные в виде двух тросовых тяг, воздействующих на одну или несколько рулевых поверхностей, выполненных в виде одного или нескольких закрылков, крыльев самолета. Один конец троса передающего тракта 1, выполненный в виде тросовой тяги, намотан на первый связующий элемент 10, выполненный предпочтительно в виде барабана, а другой конец соединен с одной или множеством рулевых поверхностей. Точно так же один конец троса передающего тракта 2, выполненный в виде тросовой тяги, намотан на второй связующий элемент 20, выполненный предпочтительно в виде барабана. Оба связующих элемента 10, 20 нагружены натяжением возвратных пружин, причем тросы наматываются на связующие элементы усилиями пружин. Тросы намотаны на связующие элементы 10, 20 навстречу друг другу, так что при увеличении пути упомянутых тросовых тяг связующие элементы 10, 20 движутся в том же направлении.
Как видно на фиг.1.2, связующие элементы 10, 20 имеют разные радиусы R1, R2, чтобы компенсировать разные, передаваемые тросовыми тягами, заданные пути перемещения рулевых поверхностей. Оба связующих элемента расположены коаксиально друг другу, а радиусы R1, R2 определены по отношению к заданным путям перемещения H1, H2 упомянутых тросовых тяг так, что при бесперебойном перемещении рулевой поверхности оба связующих элемента 10, 20 вращаются с одинаковым углом вращения. Для этого радиусы R1, R2 связующих элементов 10, 20 устанавливаются по отношению к заданным путям перемещения H1, H2 тросовых тяг как Н2/Н1=R2/R1. При бесперебойном перемещении рулевой поверхности не возникает разницы углов вращения тросовых тяг, которая соответственно, приводит к разнице углов вращения связующих элементов 10, 20. Эта разница определяется датчиком 4.
Как показано на фиг.1.1, сенсорный блок может содержать узел ходовой винт/гайка, причем гайка вращается связующим элементом 10, а опирающийся на подшипники 21 ходовой винт - связующим элементом 20. При разном вращении связующих элементов осуществляется подъем гайки, что приводит в действие датчик 4.
Точно так же сенсорный блок может быть выполнен, например, в виде индуктивного датчика приближения, который закреплен на конструкции крыла и инкрементно определяет синхронное движение связующих элементов за счет меток, так называемых мишеней, на их периферии посредством измерения ширины импульсов.
В другом варианте выполнения сенсорный блок может состоять, например, из датчика приближения на одном связующем элементе и расположенной напротив него мишени на втором связующем элементе. При синхронном движении возникает постоянный «сигнал приближения мишени», прерываемый в случае ошибки. В одной модификации этого варианта датчик приближения может быть расположен на одном связующем элементе посередине между двумя мишенями на другом связующем элементе. При разных движениях связующих элементов возникает «сигнал приближения мишени», тогда как при синхронном движении сигнал всегда остается «сигналом удаления мишени». Второе устройство имеет, однако, тот недостаток, что дефектный датчик не обнаруживается. Первое же устройство имеет тот недостаток, что система является самоконтролирующей.
В предложенной сенсорной системе пружинные механизмы оказывают на связующие элементы 10, 20 возвратное усилие и создают в каждом тросе растягивающее напряжение. При выдвигании рулевой поверхности или рулевых поверхностей, соответствующая пружина за счет размотанных тросов обеих тросовых тяг продолжает натягиваться. Разные пути перемещения приводной станции могут быть компенсированы, как уже было описано, за счет соответствующего согласования диаметров связующих элементов 10, 20, так что при бесперебойном функционировании оба связующих элемента вращаются синхронно. При убирании рулевой поверхности, пружины вращают связующие элементы обратно, и тросы снова наматываются.
При возникновении сбоя движение соответствующей тросовой ветви изменяется хаотично, что передается на движение соответствующего связующего элемента. В результате возникает разница вращения связующих элементов, определяемая датчиком 4. Датчик вырабатывает теперь сигнал ошибки.
Обрыв одного из тросов определяется тоже как ошибка, поскольку относящийся к дефектному тросу связующий элемент возвращается за счет пружинящего механизма и срабатывает сенсорный механизм. Следовательно, система является самоконтролирующей.
На фиг.2 изображена сенсорная система, используемая для контроля синхронного хода двух приводов 5, 6 одной рулевой поверхности 3, выполненной в виде закрылка. Тросы обеих тросовых тяг закреплены одним концом на рулевой поверхности 3 и проходят вдоль приводных путей приводов 5, 6, так что длина тросовых тяг, в основном, соответствует длине перемещения соответствующего привода. Другие концы тросов обеих тросовых тяг проходят по огибным блокам 7 к связующим элементам сенсорного блока. Разные заданные пути перемещения приводов 5, 6 могут компенсироваться за счет разных радиусов связующих элементов 10, 20, как это описано со ссылкой на фиг.1.2.
Как только в одном из приводов рулевой поверхности возникнет сбой, например защемление или обрыв, движение соответствующей приводной станции изменяется хаотично, причем соответствующий этой станции трос передает сбой движения на свой связующий элемент. В результате возникает разница вращений связующих элементов, определяемая датчиком 4. За счет изображенного устройства можно, следовательно, контролировать синхронный ход также единственной рулевой поверхности 3.
Напротив, в изображенном на фиг.3 примере контролируется синхронный ход нескольких рулевых поверхностей. Для этой цели эффект изменения траектории прокладки тросовой тяги используется для определения асинхронных движений, причем концы тросов закреплены на одной стороне на конструкции крыла, а другой стороной нагружают дифференциальный датчик 4. В этом устройстве намотанная длина троса, по меньшей мере, в два раза больше максимального хода рулевой поверхности. Это устройство обеспечивает также контроль внешних приводных станций, соседних с неподвижной конструкцией. Также это устройство является самоконтролирующим, поскольку обрыв тросов приводит к соответствующему возврату связующего элемента, в результате чего срабатывает сенсорный механизм.
Сенсорный блок, как и в описанных выше примерах, расположен на конструкции крыла. Обе тросовые тяги проходят по огибным блокам 7 на конструкции крыла и по огибным блокам 8 на рулевых поверхностях вдоль них и своими другими концами закреплены в крепежных точках 9 конструкции крыла. Передающий тракт 1, в виде тросовой тяги проходит по правой стороне среднего закрылка 12 и по обеим сторонам правого закрылка 13, тогда как передающий тракт 2 в виде тросовой тяги проходит по левой стороне среднего закрылка 12 и по обеим сторонам левого закрылка 11. За счет этого устройства с помощью дифференциального датчика 4 можно контролировать различные асинхронности движений трех рулевых поверхностей, если они приводят к разнице длин обеих тросовых тяг.
В другом варианте выполнения можно с помощью, по меньшей мере, одной или двух сенсорных систем описанного рода контролировать синхронный ход всех рулевых поверхностей на передней и задней кромках обоих крыльев при сохранении всех описанных преимуществ. В таком устройстве, в котором сравниваются изменения положений соответствующих рулевых поверхностей обоих крыльев, не требуется компенсации разных путей перемещения, поскольку сумма изменения положений в обоих крыльях одинакова.
На фиг.4 показано устройство с двумя сенсорными системами 40, 41, которое контролирует синхронный ход рулевых поверхностей, расположенных на обоих крыльях симметрично продольной оси самолета. Сенсорный блок 41, первая тросовая тяга которого проходит по рулевой поверхности 51, выполненной в виде закрылка, а вторая тросовая тяга - по рулевой поверхности 52, выполненной в виде закрылка 52, контролирует при этом синхронный ход обеих рулевых поверхностей 51, 52. Сенсорный блок 40, первая тросовая тяга которого проходит одновременно по трем рулевым поверхностям 62, выполненным в виде закрылков, контролирует, напротив, синхронное движение рулевых поверхностей 61, выполненных в виде закрылков, по сравнению с рулевыми поверхностями 62.
При этом возможно большое число других возможностей того, как за счет разной прокладки обеих тросовых тяг можно контролировать различные комбинации рулевых поверхностей на синхронность их хода.
На фиг.5 показан второй вариант выполнения сенсорного блока, в котором тросы обеих тросовых тяг намотаны навстречу друг другу на один связующий элемент 30, выполненный в виде барабана. За счет использования только одного связующего элемента больше невозможно возникновение разницы углов вращения. Однако и в этом устройстве различные пути перемещения приводов рулевой поверхности 3 можно компенсировать за счет согласования диаметров связующего элемента 30.
Третий пример выполнения сенсорной системы показан на фиг.6.1, 6.2. Направляющий механизм для корпуса рулевой поверхности 3 содержит изогнутую связь 70, проходящую по направляющим роликам 71, и при движении вызывает дугообразное движение корпуса рулевой поверхности 3. Элементы приводных систем для наглядности не показаны.
Иначе, чем в первом и втором вариантах выполнения, передающие тракты состоят не из тросовой тяги, а передают вращательное движение. Для этого предусмотрен рычажный механизм из рычагов 72, 73, которые преобразуют движение корпуса рулевой поверхности 3 через изогнутую связь 70 во вращательное движение оси 74. Передающие тракты 1, 2, выполненные в виде сенсорных трансмиссий, соединенные с правой и левой связями рулевой поверхности, также соединены с сенсорным элементом, выполненным в виде датчика 4, который определяет разницу углов вращения между упомянутыми трансмиссиями. Трансмиссии могут быть выполнены в виде вращающейся трубы или предпочтительно также в виде гибкого вала. Гибкий вал дает преимущества при монтаже. Также это устройство является самоконтролирующим.
Сенсорный элемент может быть выполнен, например, в виде вращательного датчика положения, статор которого движется одной сенсорной трансмиссией, а ротор - другой. Сенсорный блок может состоять также, например, из выключателя приближения, синхронно движущегося посредством сенсорной трансмиссии, и мишени. Также возможны электромеханические выключатели и контактные кулачки. Могут использоваться также датчики, описанные в первом примере.
Благодаря предложенной сенсорной системе можно за счет сравнения передаваемого обоими передающими трактами движения одной или нескольких рулевых поверхностей обеспечить простой и надежный контроль их синхронного хода без необходимости для этого большого числа датчиков или комплексной обрабатывающей электроники. Кроме того, возникает автоматический самоконтроль системы.
Устройство контроля за синхронностью закрылков самолетного крыла
Модульная электронная система управления полетом
Устройство по меньшей мере с одним резистором птк
Способ соединения гофрированного шланга с корпусом, система с гофрированным шлангом и соединенным с ним корпусом и воздушное средство сообщения, по меньшей мере, с одной указанной системой
Привод ходового винта
Привод ходового винта
Установочное устройство для позиционирования конструктивного элемента
Сервоклапан
Контроль состояния сервопривода в летательном аппарате
Электронный блок для периферийных приборов летательного аппарата
Устройство контроля за синхронностью закрылков самолетного крыла
Модульная электронная система управления полетом
Устройство по меньшей мере с одним резистором птк
Способ соединения гофрированного шланга с корпусом, система с гофрированным шлангом и соединенным с ним корпусом и воздушное средство сообщения, по меньшей мере, с одной указанной системой
Привод ходового винта
Привод ходового винта
Установочное устройство для позиционирования конструктивного элемента
Сервоклапан

