Результат интеллектуальной деятельности: КОРРЕЛЯЦИОННО-БАЗОВАЯ СИСТЕМА ЛОКАЦИИ НЕПОДВИЖНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Корреляционно-базовая система локации неподвижных источников радиоизлучения с использованием беспилотного летательного аппарата относится к области радиотехники и, конкретно, к системам пассивной радиолокации и предназначена для оперативного определения координат неподвижных источников радиоизлучения, в том числе при не разрешении их сигналов по времени и частоте.
Известен способ определения координат источника радиоизлучений с борта летательного аппарата [1]. Недостатком данного способа и, как следствие систем в которых он может быть реализован, является невозможность определения координат нескольких источников радиоизлучения (ИРИ), сигналы которых не разрешаются приемной аппаратурой по частоте и времени приема.
Известно устройство поиска ИРИ типа забрасываемых передатчиков помех (ЗПП) [2], позволяющее однозначно определять местоположение каждого из нескольких ЗПП, работающих на одной частоте, на фоне импульсных сигналов РЭС и информировать оператора о его позиции относительно обнаруженных ЗПП.
Недостатками известного устройства являются:
невозможность реализации потенциальной точности измерений местоположения ИРИ по причине ограничений, накладываемых на траекторию перемещения группы поиска ИРИ особенностями местности;
низкая скорость получения информации о местоположении ИРИ по причине пешего перемещения группы поиска по пересеченной местности.
Работа известного устройства происходит следующим образом.
Устройство состоит из подвижного и неподвижного приемных пунктов, связанных каналом передачи данных.
Производится установка и включение неподвижного приемного пункта, после чего производится включение находящегося рядом с ним подвижного приемного пункта. Подвижным приемным пунктом производится автоматическое определение собственных координат и их запоминание, таким образом, в подвижный приемный пункт вводятся координаты позиции неподвижного приемного пункта. Одновременно с этим, производится прием сигналов ЗПП обоими приемными пунктами, передача принятого сигнала с неподвижного на подвижный приемный пункт и вычисление относительной задержки передачи сигнала, вносимой каналом передачи данных. После этого оператор подвижного приемного пункта начинает перемещение на новую позицию.
Неподвижный приемный пункт, являясь ретранслятором сигналов ЗПП, производит постоянный их прием и передачу по линии связи на подвижный приемный пункт. Подвижный приемный пункт, аналогично неподвижному приемному пункту, производит постоянный прием сигналов ЗПП. Принимаемые сигналы могут содержать сигналы помех, создаваемые ЗПП, а так же импульсные сигналы РЭС, которым ЗПП создают помехи. Оба сигнала (принятый с неподвижного приемного пункта и принятый подвижным приемным пунктом) поступают на корреляционный обнаружитель, вычисляющий разность задержек сигналов принятых приемными пунктами. При этом в вычисленную разность вносятся поправки на измеренную ранее задержку сигнала, вносимую каналом передачи данных, и время распространения сигнала между приемными пунктами по каналу связи. Последняя поправка рассчитывается по разности координат приемных пунктов с учетом скорости распространения электромагнитной волны.
Измеренная задержка приема сигналов ЗПП приемными пунктами, используется для построения линий возможного положения ЗПП (гипербол).
Число гипербол, полученных для фиксированного положения приемных пунктов, соответствует числу излучающих ЗПП.
Далее происходит перемещение подвижного приемного пункта на новую позицию и процедура расчета гипербол повторяется. Поскольку подвижный приемный пункт оборудован приемником сигналов спутниковой радионавигационной системы (навигационным приемником), пеленгация может производиться во время движения подвижного приемного пункта.
Смена позиции производится до тех пор, пока не будет набрано достаточное для установления местоположения ЗПП число гипербол.
Для установления местоположения одного ЗПП достаточно наличие двух гипербол, снятых с различных позиций.
В качестве наиболее близкого аналога выбрано рассмотренное устройство [2].
Техническим результатом изобретения является снижение времени установления местоположения каждого из нескольких ИРИ при их размещении на большой площади.
Корреляционно-базовая система локации неподвижных источников радиоизлучения с использованием беспилотного летательного аппарата, содержащая неподвижный пункт и подвижный приемный пункт, каждый из которых имеет антенну и локационный приемник, подвижный приемный пункт имеет навигационный приемник, отличающаяся тем, что неподвижный приемный пункт состоит из приемо-передающей антенны, антенного переключателя, аттенюатора, сумматора, генератора импульсов точной синхронизации, переносного персонального компьютера, локационного приемника и навигационного приемника, причем приемо-передающая антенна подключена к антенному переключателю, выход которого подключен к первому входу сумматора, выход сумматора подключен к входу локационного приемника, выход локационного приемника подключен к переносному персональному компьютеру, выход навигационного приемника подключен к переносному персональному компьютеру, переносной персональный компьютер соединен с управляющим входом генератора импульсов точной синхронизации и управляющим входом антенного переключателя, выход генератора импульсов точной синхронизации соединен с входом антенного переключателя и входом аттенюатора, выход которого подключен ко второму входу сумматора, подвижный приемный пункт состоит из беспилотного летательного аппарата с размещенными на нем приемной антенной, локационным приемником, микрокомпьютером и навигационным приемником, причем антенна подключена к входу локационного приемника, выходы локационного и навигационного приемников подключены к микрокомпьютеру.
Корреляционно-базовая система локации неподвижных источников радиоизлучения с использованием беспилотного летательного аппарата является корреляционно-базовой системой пассивной радиолокации с подвижной измерительной базой, и состоит из:
неподвижного пункта;
подвижного приемного пункта.
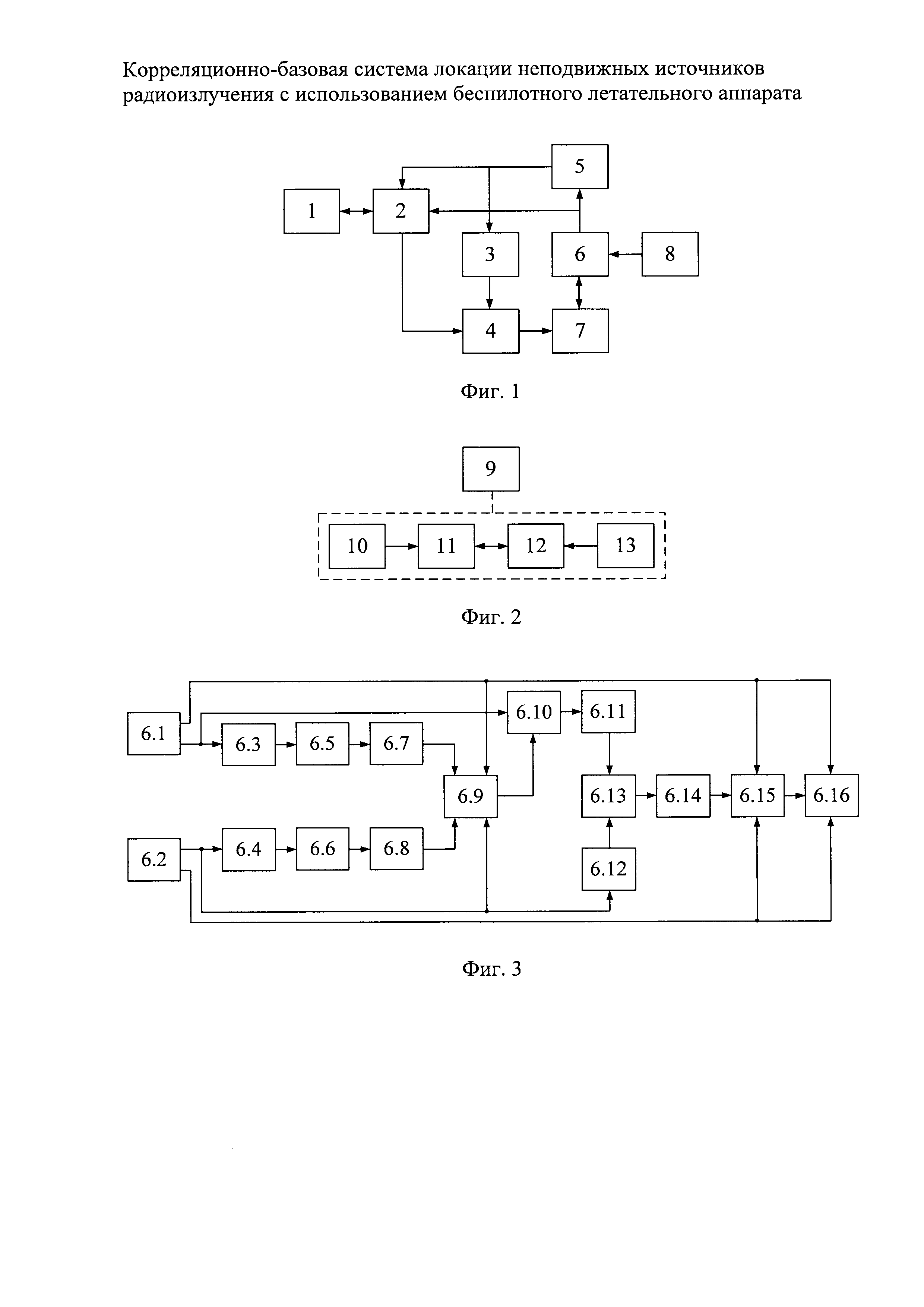
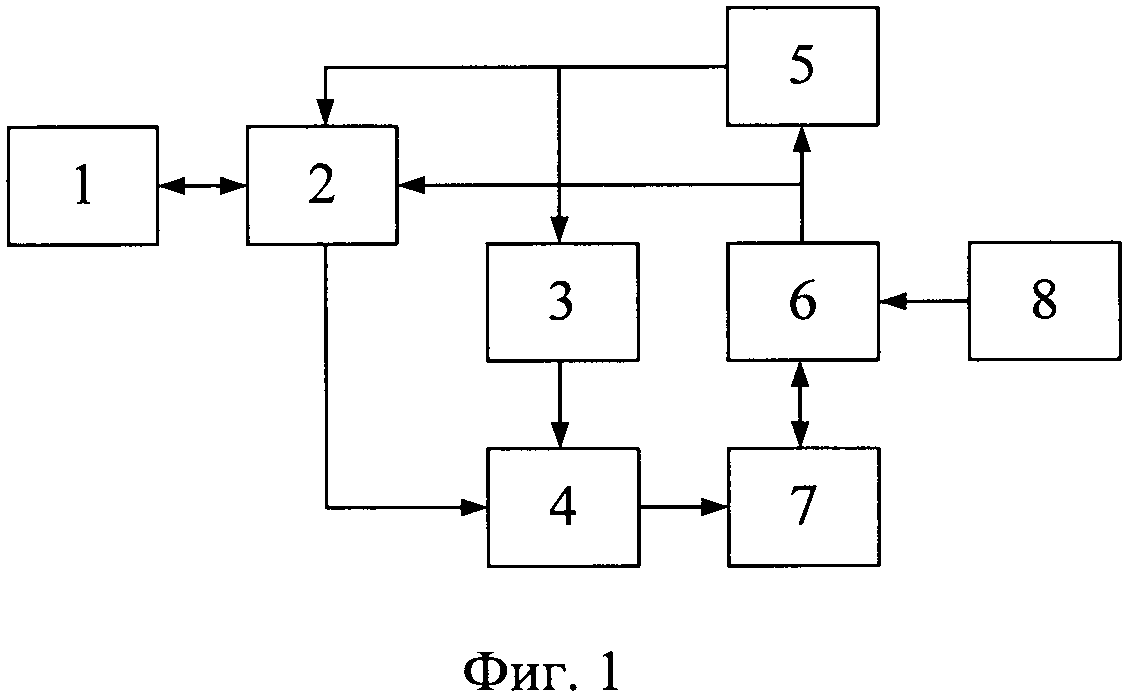
Неподвижный пункт состоит из (фиг. 1):
ненаправленной приемо-передающей антенны (1);
антенного переключателя (2);
аттенюатора (3);
сумматора (4);
генератора импульсов точной синхронизации (5);
переносного персонального компьютера (6) со специализированным программным обеспечением, реализующим функции управления аппаратурой неподвижного пункта и совместной обработки информации, сформированной обоими пунктами;
локационного приемника (7), являющегося широкодиапазонным супергетеродинным радиоприемником с цифровым выходом; навигационного приемника (8).
Подвижный приемный пункт (фиг. 2) состоит из беспилотного летательного аппарата (9) с размещенными на нем: приемной антенной (10);
локационным приемником (11), аналогичным локационному приемнику (7);
микрокомпьютером (12) со специализированным программным обеспечением, реализующим функции управления аппаратурой подвижного приемного пункта;
навигационным приемником (13).
Устройство позволяет определять местоположение неподвижных ИРИ, находящихся на земной поверхности, условно считающейся плоской.
Определение местоположения ИРИ производится разностно-дальномерным методом [3, с. 249] после полета БЛА (9) и его последующей посадки.
Суть разностно-дальномерного метода определения местоположения состоит в расчете линии возможного положения ИРИ (кривой второго порядка), соответствующей постоянной разности времен приема сигналов двумя и (или) более приемными пунктами.
При использовании двух приемных пунктов с известными координатами, и известной (измеренной) разности времени между моментами приема сигнала приемными пунктами возможное местоположение ИРИ в трехмерном пространстве описывается одной из двух поверхностей двуполостного гиперболоида вращения [4, с. 43]. Выбор поверхности (устранение неоднозначности измерений) производится по знаку измеренной разности задержек. При известных координатах приемных пунктов и условии, что источник радиоизлучения расположен на земной поверхности, возможное положение источника радиоизлучения будет соответствовать кривой, образованной пересечением гиперболоида плоскостью земной поверхности. При допущении, что земная поверхность в районе поиска может быть условно аппроксимирована плоскостью, кривые будут описываться уравнениями второго порядка (гипербола, эллипс). Местоположения ИРИ определяются пересечением нескольких кривых, полученных в результате измерений задержки приема сигнала ИРИ приемными пунктами при различных положениях в пространстве измерительной базы. Под измерительной базой понимается отрезок, соединяющий пару приемных пунктов в пространстве. Изменение положения измерительной базы достигается перемещением подвижного приемного пункта. Координаты неподвижного пункта и подвижного приемного пункта определяются с помощью навигационных приемников (8) и (13). Для определения местоположения одного ИРИ требуется два-три измерения. Под одним измерением следует понимать измерение, произведенное при фиксированном положении измерительной базы. Для определения местоположения каждого из нескольких ИРИ требуется большее количество измерений.
При наличии двух и более ИРИ, работающих на одной несущей частоте, при однократном измерении могут быть получены разности времен приема каждого из их сигналов. При этом каждой разности времен приема будет соответствовать своя линия положения ИРИ.
Для точного измерения задержки приема сигнала парой приемных пунктов требуется высокоточная синхронизация их работы, которая достигается использованием синхронизирующего сигнала, излучаемого неподвижным пунктом. В качестве синхронизирующего сигнала используются импульсы с линейной частотной модуляцией с девиацией, равной полосе пропускания локационных приемников (7) и (11), длительностью несколько десятков миллисекунд и периодом повторения одна секунда.
Неподвижный пункт реализует функции формирования и излучения импульсов точной синхронизации и их приема, приема сигналов ИРИ, преобразования принятых сигналов в цифровую форму с последующей их записью на машинный носитель информации (МНИ).
Подвижный приемный пункт реализует функции приема импульсов точной синхронизации, приема сигналов ИРИ, преобразования принятых сигналов в цифровую форму с последующей их записью на съемный МНИ.
Обработка сигналов, принятых пунктами, производится после возвращения (посадки) БЛА (9). Обработка производится на переносном персональном компьютере (6) со специализированным программным обеспечением, реализующим совместную обработку информации, сформированной неподвижным и подвижным пунктами. Обрабатываемая информация вводится в переносной персональный компьютер (6) с МНИ, извлеченного из подвижного приемного пункта.
Результатом обработки информации являются линии положения ИРИ, соответствующие возможному положению ИРИ на земной поверхности в фиксированные моменты положения измерительной базы в пространстве. Линии положения ИРИ отображаются на экране переносного персонального компьютера (6) в географической системе координат. Точки пересечения линий положения ИРИ являются потенциальными местами положения ИРИ. Определение числа ИРИ и их координат производится оператором визуально.
На фиг. 4 приведен вариант отображения линий положения ИРИ в прямоугольной системе координат, при наличии трех ИРИ, работающих на одной частоте. Приведенный вариант отображения построен методом имитационного моделирования при следующих исходных данных:
высота полета БЛА (9) 200 м;
траектория полета - окружность радиусом 1 км с центром в точке нахождения неподвижного приемного пункта (начале координат);
число измерений - 32 (точки траектории, в которых проведены измерения, обозначены закрашенными окружностями);
координаты первого ИРИ: х1=852 м, y1=238 м;
координаты второго ИРИ: х2=-156 м, у2=369 м;
координаты третьего ИРИ: х3=-1039 м, у3=-953 м.
Импульсы точной синхронизации, формируемые и излучаемые неподвижным пунктом, предназначены для измерения задержки приема сигналов ИРИ в пределах исходных выборок сигнала. Импульсы точной синхронизации излучаются неподвижным пунктом на частоте поиска (работы) ИРИ для возможности их приема локационными приемниками (7) и (11) совместно с сигналами ИРИ.
Для обеспечения уверенного обнаружения импульсов точной синхронизации подвижным приемным пунктом и точного измерения моментов их приема в системе корреляционной обработки и индикации реализован их оптимальный прием, позволяющий значительно повысить отношение мощности импульсов точной синхронизации к мощности сигналов ИРИ.
Изобретение иллюстрируется следующими чертежами:
Фиг. 1 - структурная схема неподвижного пункта.
Цифрами обозначены:
1 - приемо-передающая антенна;
2 - антенный переключатель;
3 - аттенюатор;
4 - сумматор;
5 - генератор импульсов точной синхронизации;
6 - переносной персональный компьютер;
7 - локационный приемник;
8 - навигационный приемник.
Фиг. 2 - структурная схема подвижного приемного пункта.
Цифрами обозначены: 9-БЛА;
10 - приемная антенна;
11 - локационный приемник;
12 - микрокомпьютер;
13 - навигационный приемник.
Пунктиром обозначена конструктивная связь между аппаратурой и
БЛА.
Фиг. 3 - Структура системы корреляционной обработки и индикации.
Цифрами обозначены:
6.1 - файл с данными неподвижного пункта;
6.2 - файл с данными подвижного приемного пункта;
6.3, 6.4 - согласованные фильтры;
6.5, 6.6 - квадратичные детекторы;
6.7, 6.8 - блоки порогового сравнения;
6.9 - блок точной временной синхронизации;
6.10 - цифровая линия задержки;
6.11, 6.12 - блоки формирования выборок;
6.13 - коррелятор;
6.14 - блок порогового сравнения;
6.15 - вычислитель линий положения ИРИ;
6.16 - блок индикации.
Фиг. 4 Вариант отображения линий положения ИРИ, при наличии трех
ИРИ.
На фигуре использованы следующие обозначения:
• - позиции подвижного приемного пункта в моменты приема выборок;
ο - позиция неподвижного пункта;
∇ - места расположения ИРИ.
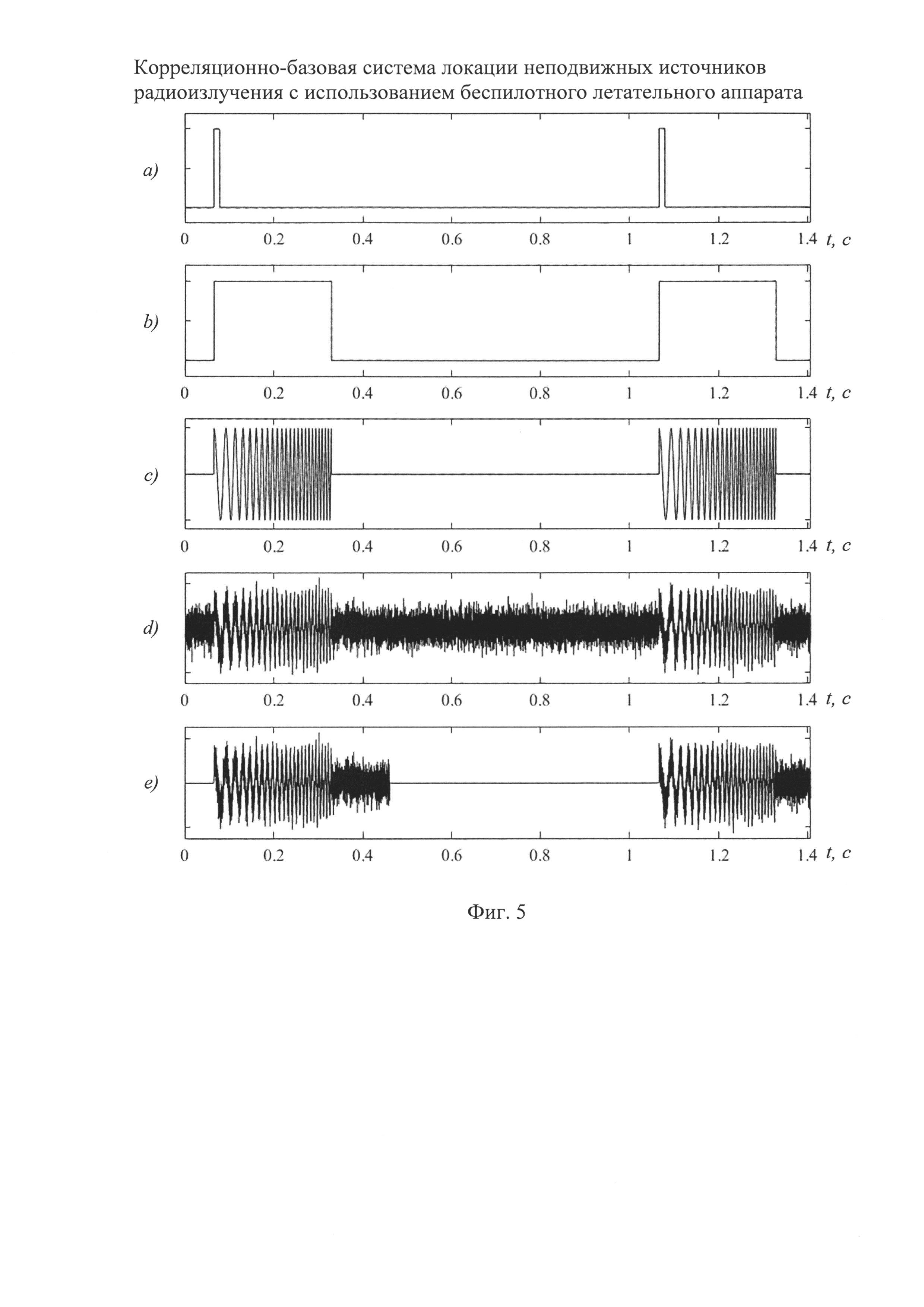
Фиг. 5 Временные диаграммы, поясняющие работу неподвижного пункта на этапе сбора данных.
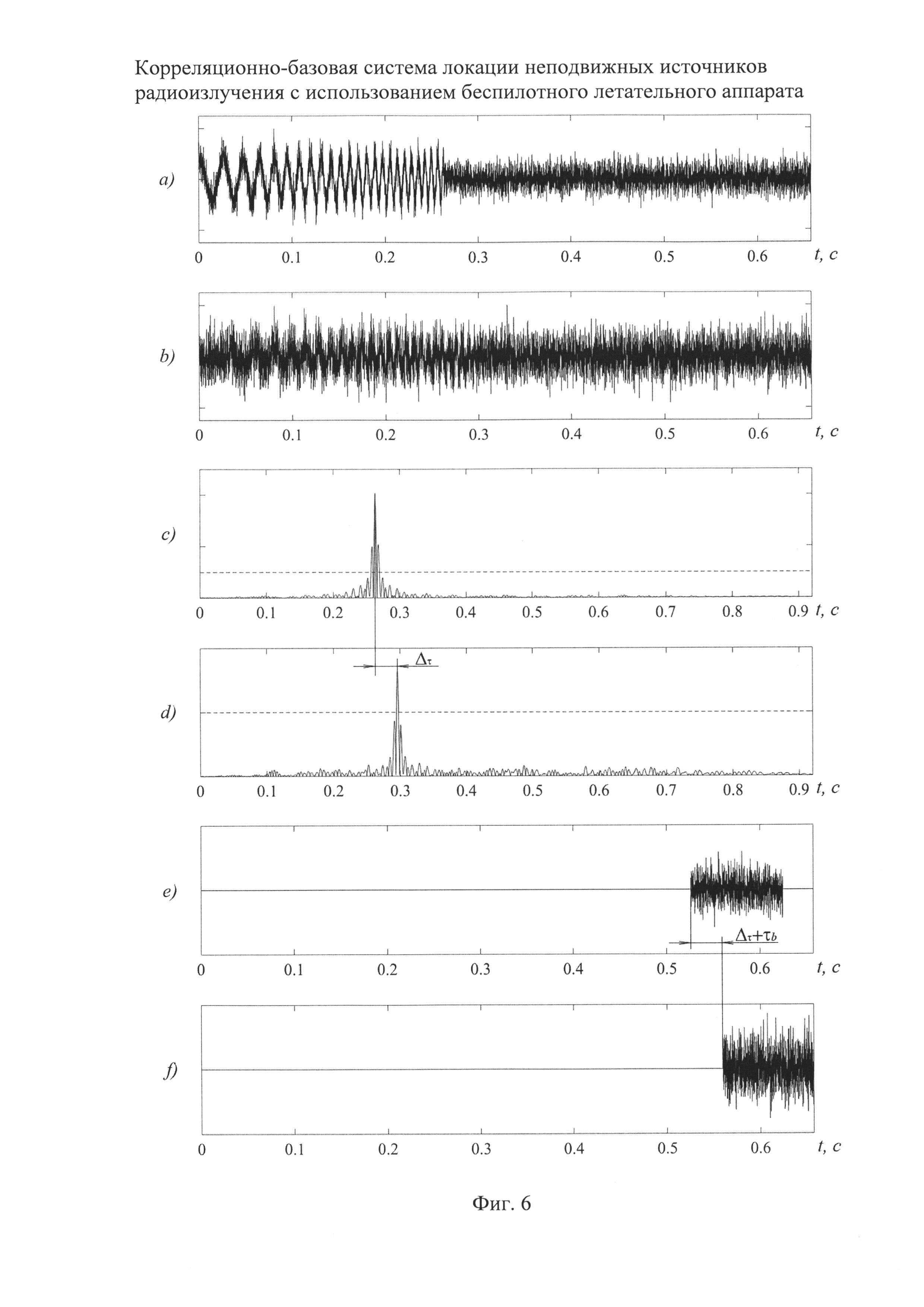
Фиг. 6 Временные диаграммы, поясняющие работу переносного персонального компьютера неподвижного пункта на этапе обработки данных.
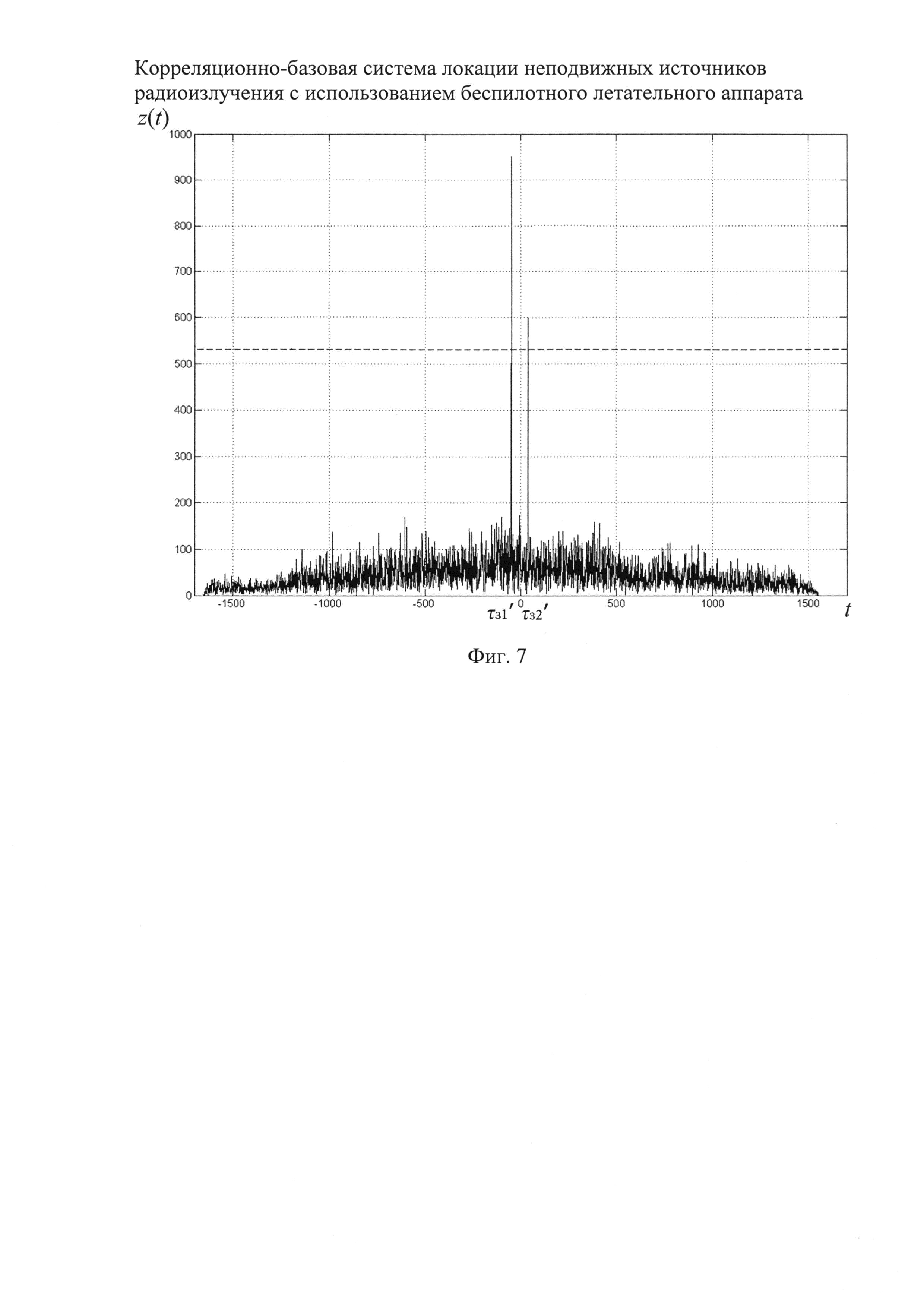
Фиг. 7 Пример взаимной корреляционной функции (ВКФ) на выходе коррелятора.
Работа устройства осуществляется следующим образом.
Цикл работы устройства состоит из трех этапов: подготовка (развертывание + конфигурирование);
сбор данных;
обработка данных.
На этапе подготовки производится развертывание аппаратуры, ее включение и конфигурирование. Конфигурирование заключается в задании частоты (диапазона частот) на которой производится поиск сигналов ИРИ и выборе одной из программ полета БЛА. Задание частоты (диапазона частот) производятся путем ввода заданных значений в конфигурационный файл, находящийся на переносном персональном компьютере (6) неподвижного пункта, последующем его копировании на МНИ и переносе на микрокомпьютер (12) подвижного приемного пункта.
На этапе сбора данных производится запуск программ сбора данных на приемных пунктах и запуск БЛА. БЛА осуществляет полет по траектории заданной программой. Рациональной является изовысотная траектория в форме окружности или спирали. Высота траектории задается минимальной при условии ее безопасности. Во время полета БЛА производится синхронная запись цифровых сигналов обоими пунктами. Работа аппаратуры записи цифровых сигналов на обоих пунктах происходит аналогично.
Помимо процедуры записи, производимой обоими пунктами, в неподвижном приемном пункте по каждому синхросигналу от навигационного приемника (8) происходит формирование и излучение импульса точной синхронизации, чем обеспечивается попадание импульса точной синхронизации в записываемую обоими пунктами выборку.
Временные диаграммы, поясняющие работу неподвижного пункта на этапе сбора данных, приведены на фиг.5.
Грубая синхронизация процессов записи цифровых сигналов производится по ежесекундным синхросигналам навигационного приемника (8). Ежесекундные синхросигналы навигационного приемника (8) приведены на графике (а) фиг. 5. По синхросигналу от навигационного приемника (8) переносной персональный компьютер (6) формирует импульс запуска генератора импульсов точной синхронизации (5) (график (b) фиг. 5) запускающий генератор импульсов точной синхронизации (5) и переводящий антенный переключатель (2) в режим «передача». Генератор импульсов точной синхронизации (5) формирует импульс точной синхронизации (график (с) фиг. 5), которой через антенный переключатель (2) поступает в приемо-передающую антенну (1). Импульс точной синхронизации через аттенюатор (3) и сумматор (4) поступает в локационный приемник (7). Вид сигнала на входе локационного приемника (7) приведен на графике (d) фиг. 5. С выхода локационного приемника (7) цифровой сигнал поступает в переносной персональный компьютер (6) где производится выделение выборки заданного объема ((e) фиг. 5). Выделенная выборка записывается в файл, в качестве имени которого используется текущие значения даты и времени, полученные от навигационного приемника (8). В тот же файл записываются текущие координаты неподвижного пункта (долгота, широта, высота), полученные от навигационного приемника (8).
Работа аппаратуры подвижного приемного пункта происходит в следующей последовательности.
Грубая синхронизация процессов записи цифровых сигналов производится по ежесекундным синхросигналам навигационного приемника (13). Ежесекундные синхросигналы навигационного приемника (13), аналогичны приведенным на графике (а) фиг. 5. По синхросигналу от навигационного приемника (13) микрокомпьютером (12) производится выделение выборки заданного объема из цифрового сигнала с выхода локационного приемника (11). Выделенная выборка записывается в файл, в качестве имени которого используется текущие значения даты и времени, полученные от навигационного приемника (13). В тот же файл записываются текущие координаты подвижного приемного пункта (долгота, широта, высота), полученные от навигационного приемника (13).
По завершении полетной программы БЛА производит посадку вблизи неподвижного пункта.
МНИ, содержащий записанные данные, извлекается из микрокомпьютера (12), размещенного на БЛА (9). Данные с МНИ копируются в переносной персональный компьютер (6), после чего запускается программа их обработки.
На этапе обработке данных производится расчет линий положения ИРИ и их отображение на экране переносного персонального компьютера (6). Обработка данных производится по алгоритму, содержащему три этапа.
На первом этапе производится грубая временная синхронизация обрабатываемых данных путем составления списка пар одноименных файлов (записанных одновременно двумя пунктами). Файлы, оставшиеся без пары, удаляются.
На втором этапе производится фильтрация сигнальной выборки из каждого файла (6.1) и (6.2) и их взаимная точная временная синхронизация. Вид сигналов исходных выборок подвижного приемного пункта и неподвижного пункта приведен на графиках (а) и (b) фиг. 6. Фильтрация производится согласованными фильтрами (6.3) и (6.4) в целях выделения из сигнальной выборки импульса точной синхронизации. С выхода согласованных фильтров сигналы подаются на квадратичные детекторы (6.5) и (6.6). Примеры сигналов на выходе квадратичных детекторов (6.5) и (6.6) приведены на графиках (с) и (d) фиг. 6. С выходов квадратичных детекторов (6.5) и (6.6) сигналы поступают в блоки порогового сравнения (6.7) и (6.8), в которых производится их сравнение с пороговым значением в целях обнаружения импульсов точной синхронизации. В случае не обнаружения импульса точной синхронизации хотя бы в одном из блоков (6.7) и (6.8) обработка текущей пары выборок прекращается. Примеры сигналов на выходах блоков (6.5) и (6.6) приведены на графиках (е) и (ƒ) фиг. 6. На этих же графиках пунктиром показаны пороговые значения, используемые при обнаружении импульсов точной синхронизации. В случае обнаружения импульсов синхронизации в обоих сигналах, данные сигналы поступают в блок точной временной синхронизации (6.9), где по временному положению максимальных значений амплитуд сигналов превысивших порог и расстоянию между пунктами производится точная временная синхронизация. Точная временная синхронизация производится путем смещения выборки сигнала подвижного приемного пункта на число отсчетов дискретного сигнала, соответствующее разности времен приема импульса точной синхронизации пунктами Δτ и учитывающее время распространения импульса точной синхронизации τb между пунктами

где ΔƒП - полоса пропускания локационного приемника;
Nmax1 - номер максимального элемента выборки сигнала неподвижного пункта на выходе квадратичного детектора (6.5);
Nmax2 - номер максимального элемента выборки сигнала подвижного приемного пункта на выходе квадратичного детектора (6.6);
 - число отсчетов сигнала, пропорциональное времени распространения импульса точной синхронизации между неподвижным пунктом и подвижным приемным пунктом;
- число отсчетов сигнала, пропорциональное времени распространения импульса точной синхронизации между неподвижным пунктом и подвижным приемным пунктом;
 - размер измерительной базы;
- размер измерительной базы;
хППП, yППП, zППП - координаты подвижного приемного пункта относительно неподвижного пункта в прямоугольной системе координат;
с - скорость распространения электромагнитной волны.
Рассчитанное блоком точной временной синхронизации (6.9) число дискретных отсчетов т поступает в цифровую линию задержки (6.10), где используется для задержки сигнала из выборки неподвижного пункта. Задержанный сигнал из выборки неподвижного пункта с выхода цифровой линии задержки (6.10) и сигнал из файла выборки подвижного приемного пункта (6.2) поступают в блоки формирования выборок (6.11) и (6.12) в которых происходит формирование конечных выборок путем их выделения из исходных. Конечные выборки формируются из части исходных выборок, не содержащей отсчетов импульса точной синхронизации. Примеры конечных выборок на выходе блоков формирования выборок (6.11) и (6.12) приведены на графиках (е) и (ƒ) фиг. 6.
На третьем этапе производится обнаружение сигналов ИРИ и оценка значений разности моментов их приема пунктами.
Конечные выборки из блоков формирования выборок (6.11) и (6.12) поступают в коррелятор (6.13). В корреляторе (6.13) производится вычисление модуля взаимной корреляционной функции (ВКФ) конечных выборок. ВКФ вычисляется дискретной сверткой [5, с. 208] конечных выборок в соответствии с выражением

где M=2I-1 - объем ВКФ;
I - объем конечной выборки;
n=1…М-1 - индексация отсчетов ВКФ;
s1 - конечная выборка сигнала, принятого неподвижным пунктом;
s2 - конечная выборка сигнала, принятого подвижным приемным пунктом.
На фиг. 7, показан пример ВКФ, имеющей два корреляционных максимума, соответствующих двум ИРИ. Корреляционные максимумы имеют задержки τз1' и τз2'. Пунктиром показан порог обнаружения ИРИ.
Значения временных задержек, соответствующие максимумам ВКФ превысившим порог, рассчитываются в блоке порогового сравнения (6.14). Оценка задержек сигналов производится в соответствии с выражением

где uj - номера отсчетов ВКФ, превысивших порог обнаружения ИРИ;
j=1, 2, … - номера максимумов ВКФ, превысивших порог обнаружения ИРИ.
Значение порога обнаружения ИРИ задается оператором производящим обработку данных на переносном персональном компьютере (6).
В вычислителе линий положения ИРИ (6.15) на основе измеренных задержек рассчитывается абсолютная разность расстояний между пунктами и каждым из обнаруженных ИРИ по формуле

На основе измеренных абсолютных разностей расстояний между пунктами и каждым из обнаруженных ИРИ и координат пунктов в момент приема выборок производится вычисление линий положения ИРИ.
Координаты точек, принадлежащих линиям положения ИРИ, вычисляются в следующей последовательности.
Вычисляются координаты х', у', z' точек, принадлежащих линиям положения ИРИ на плоскости, повернутой на углы α и β относительно осей. у и z соответственно. Ось у направлена на север, ось z - вверх, ость x - на восток.
Координаты точек х', у', z' находятся как действительные корни квадратного уравнения

где  ,
, 
х' - абсцисса;
у' - ордината;
z'=bx'+ay' - аппликата.
Решение уравнения (5) производится для значений ординаты у' заданных в диапазоне, соответствующем зоне поиска ИРИ относительно положения неподвижного пункта, с фиксированным шагом.
Производится расчет углов поворота системы координат
β=arctg(a⋅cos α+b⋅sin α).
Производится поворот пространственной системы координат с рассчитанными координатами точек х', у', z' на углы α, β и -α относительно осей у, z и у соответственно.
После поворота системы координат импликаты всех точек, принадлежащих линиям положения ИРИ, становятся равны нулю. Координаты точек, принадлежащих линии положения ИРИ, имеют две координаты х и у.
Вычисленные линии положения ИРИ, в виде совокупности координат точек плоскости, поступают в блок индикации (6.16), где производится пересчет координат линий положения ИРИ из прямоугольный в географическую систему координат.
Индикация линий положения ИРИ производится блоком индикации (6.16). Кроме линий положения ИРИ, блоком индикации (6.16) на экране переносного персонального компьютера (6) отображается позиция неподвижного пункта.
Второй и третий этапы алгоритма обработки данных повторяются для каждой пары файлов, отобранной на первом этапе.
Система корреляционной обработки и индикации реализована в форме специализированного программного обеспечения переносного персонального компьютера (6).
Вариант отображения линий положения ИРИ в прямоугольной системе координат, при наличии трех ИРИ, работающих на одной частоте, приведен на фиг.4. При достаточном числе линий положения ИРИ видны области их интенсивного пересечения. Данные области соответствуют местам нахождения ИРИ. Остальные одиночные пересечения линий положения ИРИ являются статистически независимыми (случайными).
Размещение подвижного приемного пункта на БЛА позволяет за меньшее время произвести измерения на территории поиска ИРИ, чем достигается снижение времени установления положения каждого ИРИ. Таким образом, достигается заявленный технический результат.
Литература
1. Патент на изобретение №2619915.
2. Патент на изобретение №2620607.
3. Куприянов А.И. Радиоэлектронная борьба. - М.: «Вузовская книга», 2013.
4. Справочник по математике для инженеров и учащихся втузов. Бронштейн И.Н., Семендяев К.А. - М.: «Наука», Главная редакция физико-математической литературы, 1981.
5. Р. Лайонс. Цифровая обработка сигналов. Пер. с англ. - М.: ООО «Бином-Пресс», 2006.
Корреляционно-базовая система локации неподвижных источников радиоизлучения (ИРИ) с использованием беспилотного летательного аппарата (БПЛА), содержащая неподвижный пункт и подвижный приемный пункт, отличающаяся тем, что неподвижный пункт состоит из приемо-передающей антенны, антенного переключателя, аттенюатора, сумматора, генератора импульсов точной синхронизации, переносного персонального компьютера, локационного приемника и навигационного приемника, причем приемо-передающая антенна подключена к антенному переключателю, выход которого подключен к первому входу сумматора, выход сумматора подключен к входу локационного приемника, выход локационного приемника подключен к переносному персональному компьютеру, выход навигационного приемника подключен к переносному персональному компьютеру, переносной персональный компьютер соединен с управляющим входом генератора импульсов точной синхронизации и управляющим входом антенного переключателя, выход генератора импульсов точной синхронизации соединен с входом антенного переключателя и входом аттенюатора, выход которого подключен ко второму входу сумматора, подвижный приемный пункт состоит из БПЛА с размещенными на нем приемной антенной, локационным приемником, микрокомпьютером и навигационным приемником, причем антенна подключена к входу локационного приемника, выход локационного приемника подключен к микрокомпьютеру, выход навигационного приемника подключен к микрокомпьютеру, причем навигационный приемник неподвижного пункта предназначен для определения координат неподвижного пункта, навигационный приемник подвижного приемного пункта предназначен для определения координат подвижного приемного пункта, при этом неподвижный пункт реализует функции формирования и излучения импульсов точной синхронизации и их приема, приема сигналов ИРИ, преобразования принятых сигналов в цифровую форму с последующей их записью на машинный носитель информации (МНИ), подвижный приемный пункт реализует функции приема импульсов точной синхронизации, приема сигналов ИРИ, преобразования принятых сигналов в цифровую форму с последующей их записью на съемный МНИ, совместная обработка сигналов, принятых неподвижным пунктом и подвижным приемным пунктом, производится на переносном персональном компьютере неподвижного пункта после посадки БПЛА, при этом информация, сформированная на подвижном приемном пункте, вводится в переносной персональный компьютер неподвижного пункта с МНИ, извлеченного из подвижного приемного пункта.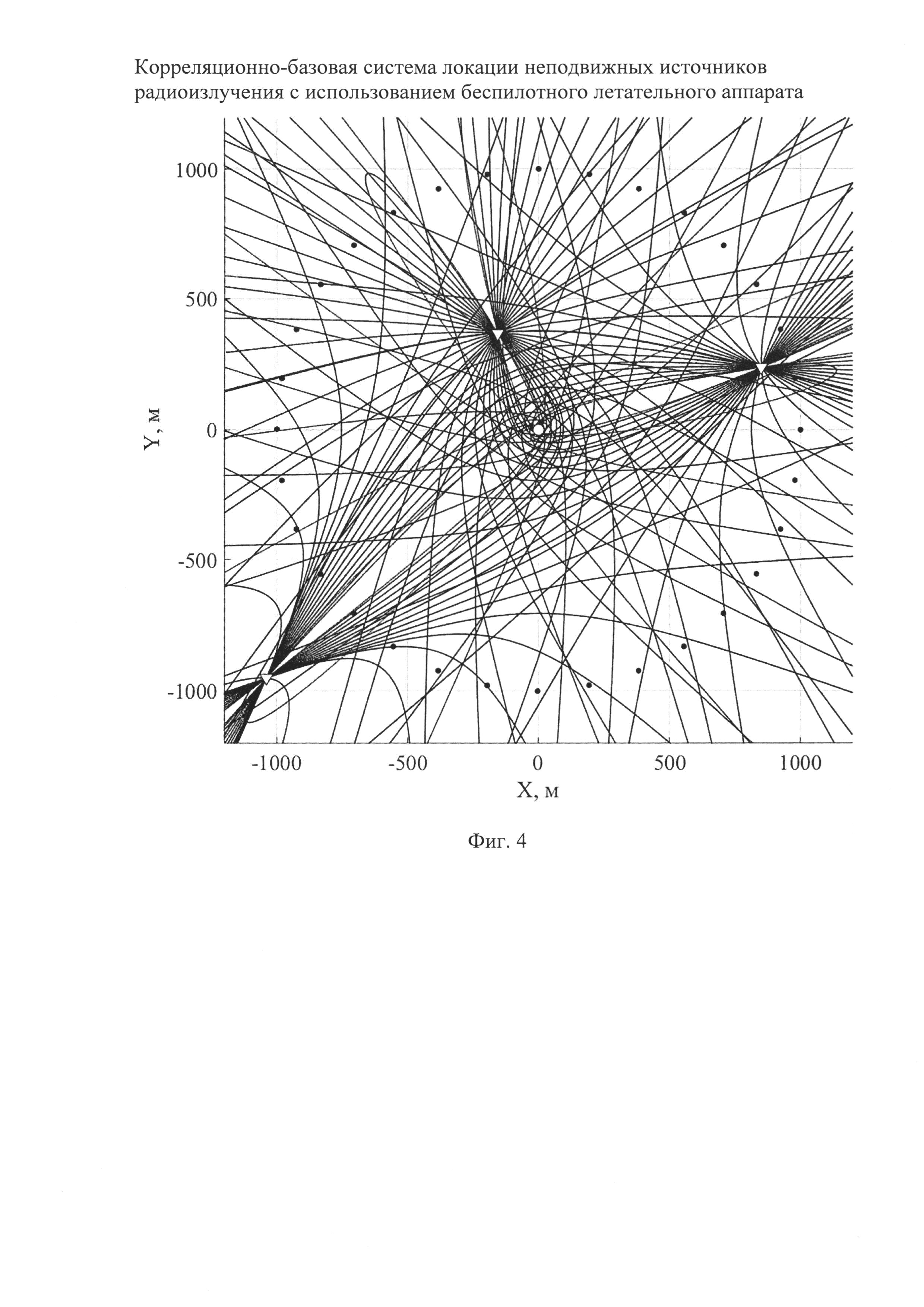
Способ сопровождения в радиолокационной станции групповой воздушной цели из класса "самолёты с турбореактивными двигателями" при воздействии уводящих по скорости помех
Фонарь кабины пилота многофункционального истребителя
Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех
Способ функционирования импульсно-доплеровской бортовой радиолокационной станции при обнаружении воздушной цели - носителя станций радиотехнической разведки и активных помех
Способ распознавания типов манипуляции радиосигналов
Способ функционирования импульсно-доплеровской бортовой радиолокационной станции с распознаванием воздействия помехи из вынесенной точки пространства при обнаружении воздушной цели, прикрываемой постановщиком помех
Способ функционирования импульсно-доплеровской бортовой радиолокационной станции истребителя при обеспечении энергетической скрытности её работы на излучение
Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на самолёт из состава их пары по его функциональному назначению по принципу "ведущий-ведомый"
Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции
Способ функционирования импульсно-доплеровской бортовой радиолокационной станции с распознаванием постановщиков помех типа drfm при обнаружении группы самолётов
Способ радиоэлектронной защиты наземной рлс кругового обзора и устройство для его реализации
Способ обработки радиолокационного сигнала в импульсно-доплеровской рлс
Устройство поиска забрасываемых передатчиков помех
Способ первичной импульсно-доплеровской дальнометрии целей на фоне узкополосных пассивных помех
Одномерный широкодиапазонный фазовый пеленгатор на основе искусственной нейронной сети
Способ распознавания типов манипуляции радиосигналов
Способ обзорной импульсно-доплеровской радиолокации целей на фоне отражений от земной поверхности
Способ некогерентного экстремального накопления-обнаружения сигнала в импульсно-доплеровской рлс
Способ радиолокационного обнаружения траектории цели
Устройство автоматического распознавания типов манипуляции радиосигналов

