Результат интеллектуальной деятельности: СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ЦЕЛИ
Вид РИД
Изобретение
Способ радиолокационного обнаружения траектории цели относится к области радиолокации и, конкретно, к способам обнаружения движущихся воздушных целей активными наземными или бортовыми РЛС. Способ может использоваться в РЛС обнаружения воздушных целей, осуществляющих последовательный регулярный обзор заданной области пространства.
Известен способ обнаружения траектории цели [1, с. 311]. Суть известного способа заключается в следующем.
РЛС производит регулярный обзор пространства путем радиолокационного зондирования каждого углового направления, последующего приема эхо-сигнала и его обработки для получения одиночных отметок. Процесс обнаружения новой траектории начинается с образования вокруг одиночной отметки строба первичного захвата, размеры которого выбираются исходя из возможного перемещения цели за период обзора. При отсутствии отметок в стробе первичного захвата начальная отметка сбрасывается как ложная (критерий завязки «2 из 2»). После того, как траектория завязана, определяется направление и скорость движения предполагаемой цели, что позволяет экстраполировать и стробировать ее положение на следующие обзоры. При попадании в эти стробы новых отметок принимается окончательное решение об обнаружении траектории.
Таким образом, процесс обнаружения траектории разбивается на два этапа: на первом осуществляется завязка траектории по критерию «2/m» (2 из m), а на втором производится подтверждение завязанной траектории, т.е. окончательное обнаружение траектории по критерию  .
.
Недостатком известного способа является загрубление информации (потеря информации), возникающее при пороговой обработке сигнала при получении одиночных отметок [2, с. 405], и приводящее к не полной реализации потенциальной эффективности обнаружения траекторий целей.
В качестве наиболее близкого аналога выбран рассмотренный способ обнаружения траектории цели [1].
Техническим результатом изобретения является повышение дальности обнаружения траектории цели при последовательном регулярном обзоре РЛС заданной области пространства.
Технический результат достигается использованием при обнаружении траектории не отметок, формируемых при превышении порога обнаружения траектории, а максимальных амплитуд сигналов из стробов.
Заявленный способ заключатся в проверке гипотезы о присутствии H1 или отсутствии Н0 сигнала цели в нескольких последовательных обзорах для каждой из локальных областей K-1 обзора, входящих в зону обзора. Каждая локальная область обзора представляет собой совокупность фиксированного числа М смежных элементов разрешения зоны обзора.
Число последовательных обзоров, результаты которых обрабатываются совместно, является порядком обнаружителя.
Принцип формирования стробов и их размер соответствуют способу, выбранному в качестве аналога.
Достаточная статистика, используемая для проверки гипотезы о наличии траектории цели, рассчитывается как сумма квадратов максимальных значений сигнала из локальной области первого обзора и из K-1 стробов из последующих обзоров

где w - v-мерная дискретная весовая функция, задающая строб;
 - реализация дискретного сигнала в v-мерном пространстве, полученная в k-ой выборке;
- реализация дискретного сигнала в v-мерном пространстве, полученная в k-ой выборке;
 - квадрат максимального значения сигнала из выборки;
- квадрат максимального значения сигнала из выборки;
I и Q - квадратурные сигналы на выходе приемника РЛС;
N - множество значений векторов, задающих координаты элементов разрешения, входящих в k-й строб;
k - нумерация обзоров;
K - порядок обнаружителя.
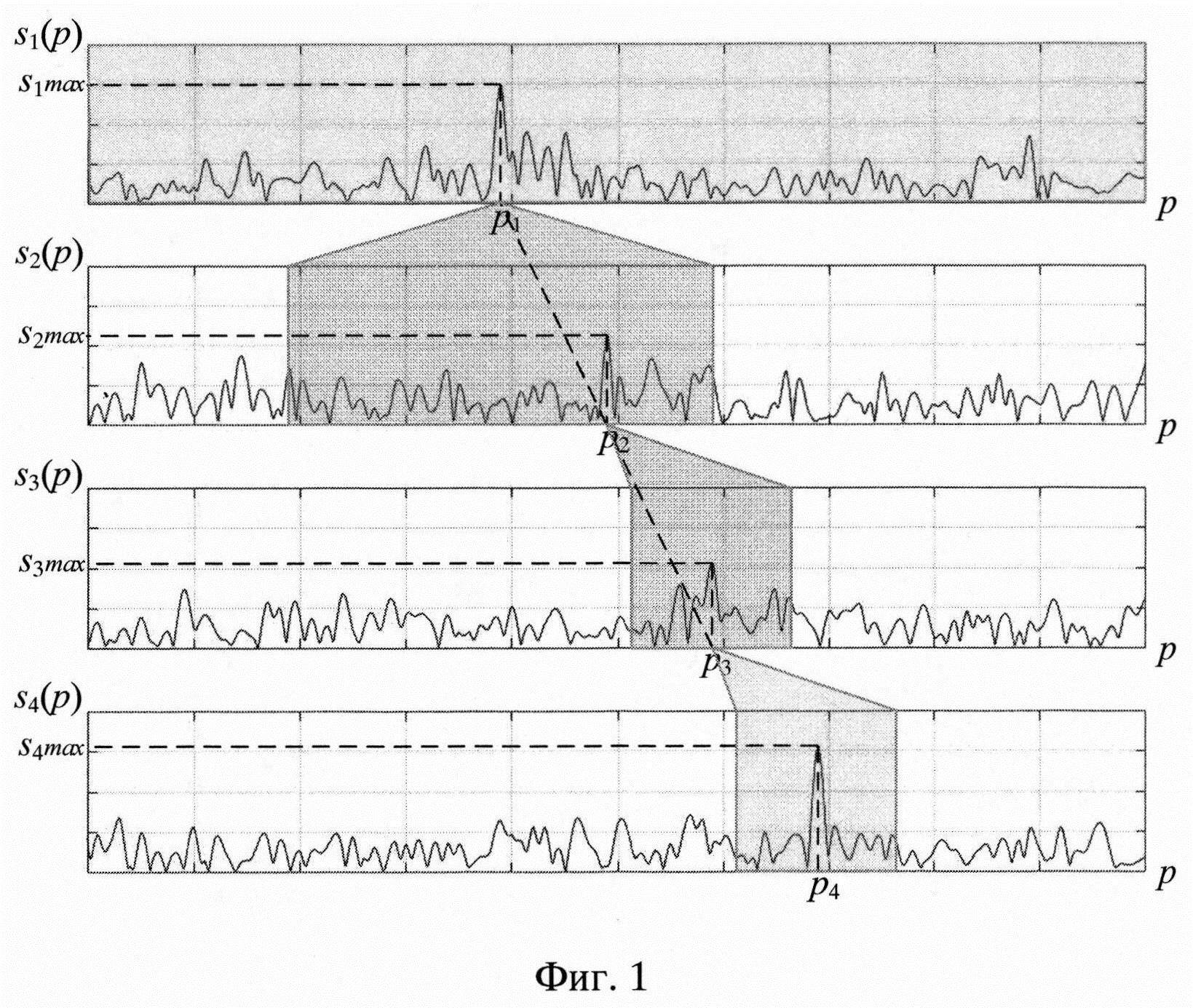
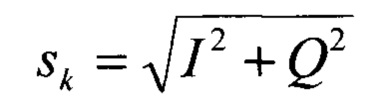
Принцип формирования достаточной статистики для одномерного случая (v = 1) пояснен фиг. 1.
На фиг. 1 приведены четыре реализации сигнала s(p) (K = 4), соответствующие одной области пространства, полученные в различных обзорах. Каждая реализация сигнала является аддитивной смесью шума и полезного сигнала. В качестве параметра р может выступать любая измеряемая координата (наклонная дальность, радиальная скорость, азимут, угол места).
Положения стробов для последующих обзоров формируют на основе положений максимальных значений сигнала в стробах предыдущих обзоров следующим образом.
В первом обзоре в реализации сигнала s1(p), соответствующей одной локальной области обзора (затемненная область на графике s1(p)), определяют его максимальное значение s1max и соответствующую ему оценку параметра p1. Относительно данной оценки параметра возникает, а затем проверяется гипотеза о наличии траектории цели, для чего: определяют положение строба (затемненная область на графике s2(p)) для поиска максимума сигнала, полученного в следующем обзоре. Строб w2 должен быть достаточно большим по причине отсутствия оценок параметров движения цели (скорости и направления). Во взвешенном стробом сигнале второго обзора производят определение его максимального значения s2max и соответствующую ему оценку параметра р2. На основе оценок параметров р1 и р2 возможно сужение областей поиска максимумов сигнала в последующих обзорах путем уменьшения соответствующих стробов (затемненные области на графиках s3(p) и s4(p)) и выбора их положения с учетом динамики измерения параметра р.
Критерием принятия гипотезы о наличии траектории цели является превышение значением достаточной статистики (1) порога подтверждения гипотезы h

Порог подтверждения гипотезы для критерия Неймана-Пирсона находится из выражения

где F - заданная вероятность ложного обнаружения траектории;
ƒn(Z) - плотность вероятности достаточной статистики на выходе обнаружителя при наличии на входе только шума.
Плотность вероятности ƒn(Z), находится через характеристические функции суммируемых случайных величин

где ƒk(f) - характеристическая функция &-ой случайной величины.
В случае распределения амплитуды шума в квадратурных каналах по нормальному закону с нулевым математическим ожиданием, плотность вероятности максимальных значений сигнала sk

где uk - объемы выборок анализируемого сигнала, равные числу элементов разрешения в соответствующих стробах (u1 = М, uK-1 - число элементов разрешения в стробах прошлых обзоров, из которых u2 - число элементов разрешения в первичном стробе, а uK - число элементов разрешения в стробе текущего обзора);
σ2 - дисперсия шума в квадратурных каналах.
Изобретение иллюстрируется следующими чертежами:
Фиг. 1 - принцип отбора значений сигнала для формирования достаточной статистики для одного параметра (одномерного пространства).
На фиг. 1 приведены четыре реализации сигнала s(p), соответствующие одной области пространства, полученные в различных обзорах (s1(p) - в первом, s2(p) - во втором и т.д.). В качестве параметра р может выступать любая измеряемая координата (наклонная дальность, радиальная скорость, азимут, угол места). Объемы выборок анализируемого сигнала выделены затемненными областями.
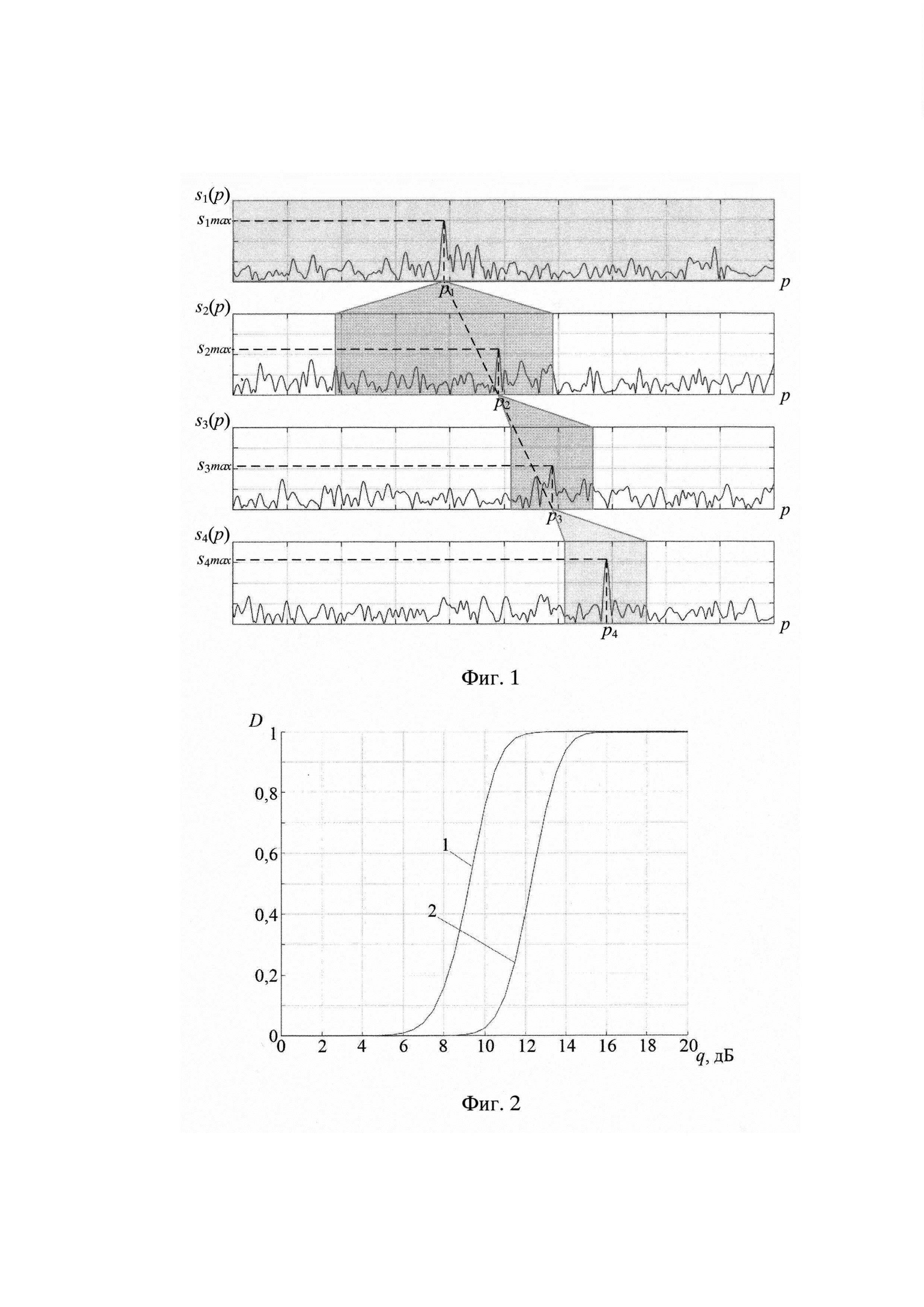
Фиг. 2 - кривые обнаружения траектории цели при отсутствии флуктуаций амплитуды сигнала.
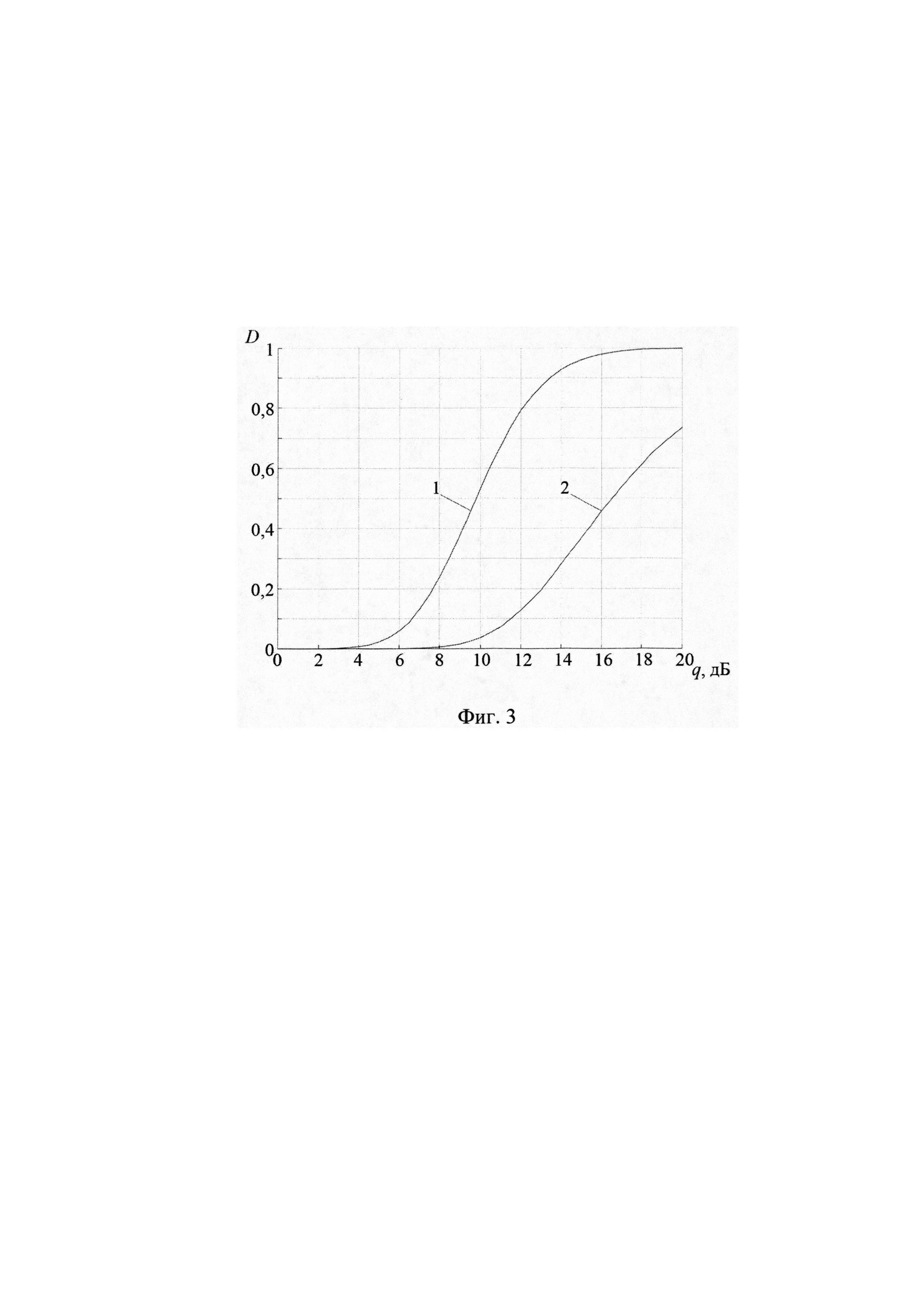
Фиг. 3 - кривые обнаружения траектории цели при флуктуациях амплитуды сигнала по закону Релея.
На фиг. 2 и 3 цифрами обозначены:
1 - кривые обнаружения траектории заявленным способом;
2 - кривые обнаружения траектории способом, принятым в качестве аналога.
Заявленный способ включает:
Разбиение всей зоны обзора, представленной совокупностью элементов разрешения, на локальные области обзора, каждая из которых содержит М смежных элементов разрешения (значение М целесообразно выбирать в диапазоне от 20 до 500).
В первом (после начала обзора) обзоре заданной области пространства производят детектирование квадратурных сигналов с выхода приемника РЛС для каждого элемента разрешения  и определение для каждой локальной области обзора элемента разрешения, содержащего сигнал с максимальной амплитудой.
и определение для каждой локальной области обзора элемента разрешения, содержащего сигнал с максимальной амплитудой.
Относительно данного элемента разрешения, оценки координат которого известны, строят первичный строб, размеры которого выбирают исходя из возможного перемещения цели за период обзора. Первичный строб используют для селекции элементов разрешения, содержащих сигналы полученные в следующем обзоре. Из всех элементов разрешения, попавших в первичный строб, производят выбор элемента разрешения, содержащего сигнал с максимальной амплитудой.
На основе выбранных элементов разрешения в первом и втором обзорах, определяют направление и скорость движения предполагаемой цели, на основании которых экстраполируют и стробируют ее положения на следующих K-2 обзорах. В соответствующих стробах следующих обзоров производят поиск элементов разрешения содержащих сигналы с максимальным амплитудами.
Квадраты найденных в К обзорах максимальных значений сигнала суммируют
и сравнивают Z с порогом h подтверждения гипотезы. По результатам сравнения принимают решение о наличии или отсутствии траектории цели в соответствии с (2).
Порог подтверждения гипотезы определяют по (3) для заданной вероятности ложного обнаружения траектории F.
В случае обнаружения траектории цели, точками траектории выбирают координаты элементов разрешения, отобранные за K обзоров по критерию максимальных амплитуд сигналов.
Технический результат оценен на примере РЛС с известным [1] алгоритмом завязки трассы  при «2/2 + 1/2» для следующих исходных данных:
при «2/2 + 1/2» для следующих исходных данных:
число элементов разрешения в стробе обнаружения 36;
число элементов разрешения в стробах подтверждения 9;
вероятность обнаружения отметки 10-4;
вероятность ложного обнаружения траектории 6,5⋅10-10;
вероятность правильной селекции истинной отметки стробом подтверждения 0,95.
Исходные данные и параметры для заявленного способа:
порядок обнаружителя K = 4;
объем начальной выборки М = u1 = 40;
объем второй выборки u2 = 36;
объемы третьей и четвертой выборок u3 = u4 = 9;
порог обнаружения гипотезы выбран для обеспечения вероятность ложного обнаружения траектории 6,5⋅10-10;
вероятность правильной селекции истинной отметки третьим и четвертым стробами 0,95.
Оценка эффективности проведена без учета накопленной вероятности.
На фиг. 2 и 3 приведены кривые обнаружения (зависимости вероятности правильного обнаружения траектории D от отношения сигнал/шум q) не флуктуирующего и флуктуирующего по амплитуде сигнала алгоритмом аналога «2/2 + 1/2» и кривые обнаружения траектории заявленным способом.
Значение технического результата зависит от порядка обнаружителя, объемов выборок, вероятности ложной тревоги и др. факторов.
В рассмотренном примере повышение отношения сигнал/шум при вероятности обнаружения 0,5 и вероятности ложного обнаружения траектории 6,5⋅10-10 составило:
3 дБ при обнаружении не флуктуирующего по амплитуде сигнала;
6,4 дБ при обнаружении флуктуирующего по амплитуде сигнала.
Данное повышение отношения сигнал/шум эквивалентно увеличению дальности обнаружения траектории цели на 18% и 44% соответственно при фиксации значения вероятности ложной тревоги.
Таким образом достигается заявляемый технический результат.
Литература
1. Кузьмин С.З. Цифровая радиолокация. Введение в теорию. - Киев: КВiЦ, 2000.
2. Теория обнаружения сигналов. П.С. Акимов, П.А. Бакут, В.А. Богданович и др.; Под. ред. Бакута П.А. - М.: Радио и связь, 1984.


Способ обзорной импульсно-доплеровской радиолокации целей на фоне пассивных помех
Способ радиоэлектронной защиты наземной рлс кругового обзора и устройство для его реализации
Способ обработки радиолокационного сигнала в импульсно-доплеровской рлс
Устройство поиска забрасываемых передатчиков помех
Способ первичной импульсно-доплеровской дальнометрии целей на фоне узкополосных пассивных помех
Одномерный широкодиапазонный фазовый пеленгатор на основе искусственной нейронной сети
Способ некогерентного экстремального накопления-обнаружения сигнала в импульсно-доплеровской рлс
Способ радиоэлектронной защиты наземной рлс кругового обзора и устройство для его реализации
Способ обработки радиолокационного сигнала в импульсно-доплеровской рлс
Устройство поиска забрасываемых передатчиков помех
Способ первичной импульсно-доплеровской дальнометрии целей на фоне узкополосных пассивных помех
Корреляционно-базовая система локации неподвижных источников радиоизлучения с использованием беспилотного летательного аппарата
Одномерный широкодиапазонный фазовый пеленгатор на основе искусственной нейронной сети
Способ распознавания типов манипуляции радиосигналов
Способ обзорной импульсно-доплеровской радиолокации целей на фоне отражений от земной поверхности
Способ некогерентного экстремального накопления-обнаружения сигнала в импульсно-доплеровской рлс
Устройство автоматического распознавания типов манипуляции радиосигналов

