Результат интеллектуальной деятельности: СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ САМОЛЕТА ПРИ ЗАХОДЕ НА ПОСАДКУ
Вид РИД
Изобретение
Изобретение относится к области авиационной техники, а именно к системам автоматического управления (САУ) боковым движением самолета при заходе на посадку.
Теоретические и практические аспекты построения систем автоматического управления боковым движением самолета при заходе на посадку подробно исследованы в работах:
1. С.Л. Белогородский. Автоматизация управления посадкой самолета. М.: Транспорт, 1972, 352 с.
2. И.А. Михалев, Б.Н. Окоемов, М.С. Чикулаев. Системы автоматической посадки. М.: Машиностроение, 1975, 216 с.
3. Михалев И.А., Окоемов Б.Н., Павлина И.Г., Чикулаев М.С., Кисилев Ю.Ф. Системы автоматического и директорного управления самолетом. М.: Машиностроение, 1974, 232 с.
Применяемые в настоящее время системы управления боковым движением самолета при заходе на посадку основаны на использовании сигнала ε углового отклонения относительно оси взлетно-посадочной полосы (ВПП) [1], [2]. Сигнал 8 имеет линейный участок и участок с ограничением по уровню ([1], с. 154, рис. 3.52). Уровень ограничения составляет ±2°.
Процесс захода на посадку разделяется на два этапа. На первом из них ([1], с. 152), при больших боковых линейных отклонениях Z от оси ВПП, когда |ε|>2°, самолет разворачивается по курсу так, чтобы угол подхода к курсовой линии ΔψП=ψ-ψВПП, где ψ - текущий угол курса самолета, ψВПП - курсовой угол продольной оси ВПП, составлял ΔψП=30°±5° и выдерживался постоянным ([1], с. 155, 4-й абзац снизу). Движение самолета с установившимся углом подхода ΔψП продолжается до момента входа сигнала ε в линейную зону. Это второй этап захода на посадку - этап вывода самолета на курсовую линию ВПП с последующей стабилизацией положения самолета на этой линии.
При фиксированном значении ΔψП в условиях большого разброса начальных условий по боковому отклонению Z от оси ВПП, начальному курсу ψ самолета и скорости V захода на посадку траектории выхода самолета на курсовую линию ВПП могут иметь самый различный характер - от длительных монотонных процессов до процессов со значительным перерегулированием ([1], с. 153-155, рис. 3.53). Нестабильность динамических характеристик процессов захода на посадку при различных начальных условиях, затягивание времени подхода к границе линейной зоны сигналов курсового радиомаяка (КРМ) при малых скоростях V захода на посадку (потеря быстродействия) являются существенными недостатками САУ, использующих в работе сигнал ε углового отклонения от оси ВПП.
Другим недостатком таких САУ является зависимость динамических характеристик процессов стабилизации самолета на курсовой линии ВПП от дальности до ВПП. По мере приближения к ВПП область устойчивости систем управления по основным параметрам (передаточным числам) резко сжимается ([2], с. 121, рис. 2.46) и для обеспечения хорошего качества процессов стабилизации самолета на курсовой линии ВПП необходима корректировка передаточных чисел в зависимости от текущей дальности до ВПП ([2], с. 120, 2-ой абзац снизу).
Указанные недостатки принципиально устраняются, если в системе управления используются сигналы не углового ε, а линейного отклонения Z и скорости линейного отклонения  от оси ВПП ([1], с. 125, формула (3.76)). В этом случае динамические характеристики процессов выхода самолета на курсовую линию ВПП и последующей стабилизации положения самолета на ней носят стабильный характер, не зависящий от дальности до ВПП ([1], с. 127, рис. 3.33).
от оси ВПП ([1], с. 125, формула (3.76)). В этом случае динамические характеристики процессов выхода самолета на курсовую линию ВПП и последующей стабилизации положения самолета на ней носят стабильный характер, не зависящий от дальности до ВПП ([1], с. 127, рис. 3.33).
Известные системы автоматического управления боковым движением самолета при заходе на посадку наиболее полно представлены в [1] (с. 147, рис. 3.47, с. 149, рис. 3.49, с. 151, рис. 3.51, с. 156, рис. 3.56, с. 157, рис. 3.57, с. 158, рис. 3.59). Из них наиболее близкой по технической сущности является система с астатическими свойствами, представленная в [1] (с. 147, рис. 3.47), взятая за прототип, в которой используется интегральный закон управления вида (3.102а).
Прототип заявляемой системы управления содержит датчик 1 углового отклонения ε самолета от оси ВПП, датчик 2 текущего курса самолета ψ и датчик 3 курсового угла ВПП ψВПП, первый 4, второй 5 и третий 6 масштабные блоки, интегратор 7, вход которого соединен с выходом второго масштабного блока 5, первый сумматор 8, входы которого соединены с выходом первого масштабного блока 4 и с выходом интегратора 7, второй сумматор 9, комплексную систему управления самолетом (КСУ) 10 для отработки заданного угла крена. Кроме того, первый вход второго сумматора 9 соединен с выходом первого сумматора 8, второй вход второго сумматора 9 - с выходом третьего масштабного блока 6, выход второго сумматора подключен к входу КСУ 10, выход датчика 1 углового отклонения ε от оси ВПП подключен к входам первого 4 и второго 5 масштабных блоков, а на вход третьего масштабного блока 6 подается сигнал разности текущего курса самолета ψ и курсового угла ВПП ψВПП.
Взятой за прототип системе управления свойственны описанные выше недостатки, а именно:
- большой разброс динамических характеристик процессов вывода самолета на посадочную курсовую линию при различных начальных условиях по боковому отклонению Z от оси ВПП, начальному курсу ψ самолета и, особенно, по скорости захода на посадку, сильно меняющейся у маневренных самолетов;
- зависимость динамических характеристик процессов стабилизации самолета на посадочной курсовой линии от дальности до ВПП.
Техническим результатом, достигаемым в заявляемой системе автоматического управления боковым движением самолета при заходе на посадку, является обеспечение стабильности динамических характеристик, повышение быстродействия процессов захода на посадку на первом этапе в условиях разброса начальных условий по боковому отклонению Z от оси ВПП, начальному курсу ψ самолета и скорости V, а также обеспечение на втором этапе захода на посадку постоянных динамических характеристик процессов стабилизации самолета на курсовой линии ВПП независимо от дальности до ВПП.
Заявляемая система автоматического управления боковым движением самолета при заходе на посадку содержит датчик углового отклонения ε самолета от оси ВПП, датчик текущего курса самолета ψ и датчик курсового угла ВПП ψВПП, первый, второй и третий масштабные блоки, первый интегратор, вход которого соединен с выходом второго масштабного блока, первый сумматор, входы которого соединены с выходом первого масштабного блока и с выходом интегратора, второй сумматор, КСУ для отработки заданного угла крена. Дополнительно система управления содержит датчик дальности самолета до КРМ наземной посадочной радиотехнической системы, датчик скорости полета, датчик угла крена у самолета, блок логики, первый вход которого соединен с выходом датчика угла крена γ, блок идентификации линейного отклонения самолета от курсовой линии ВПП, первый блок идентификации скорости отклонения самолета от курсовой линии ВПП, первый, второй и третий входы которого соединены соответственно с выходами датчика текущего курса самолета ψ, датчика курсового угла ВПП ψВПП и датчика скорости полета, второй блок идентификации скорости отклонения самолета от курсовой линии ВПП, первый вход которого соединен с выходом датчика угла крена γ самолета, второй вход подключен к выходу блока идентификации линейного отклонения самолета от курсовой линии ВПП, а выход - к первому входу блока идентификации линейного отклонения самолета от курсовой линии ВПП, первый фильтр, блок перемножения сигналов, первый вход которого соединен с выходом блока углового отклонения ε от оси ВПП, а выход подключен ко второму входу блока идентификации линейного отклонения самолета от курсовой линии ВПП, выход датчика дальности до КРМ через первый фильтр подключен ко второму входу первого блока перемножения сигналов, первый коммутатор, первый вход которого подключен к выходу блока перемножения сигналов, второй (управляющий) вход - к первому выходу блока логики, а выход - к входу второго масштабного блока, второй коммутатор, первый и второй входы которого соединены соответственно с выходами первого и второго блоков идентификации скорости отклонения самолета от курсовой линии ВПП, третий коммутатор, выход которого соединен с первым входом второго сумматора, второй вход второго сумматора подключен к выходу второго коммутатора, а выход - к входу третьего масштабного блока, управляющие входы второго и третьего коммутаторов подключены к второму выходу блока логик, второй и третий входы которого соединены соответственно с выходами датчика углового отклонения ε самолета от оси ВПП и первого масштабного блока, вход которого подключен к выходу блока идентификации линейного отклонения самолета от курсовой линии ВПП, первый блок ограничения сигнала по уровню, вход которого соединен с выходом первого сумматора, а выход - с первым входом третьего коммутатор, блок определения знака сигнала, вход которого подключен к выходу датчика углового отклонения ε самолета от оси ВПП, датчик заданной скорости приближения самолета к курсовой линии ВПП, второй блок перемножения сигналов, входы которого подключены к выходам блока определения знака сигнала и датчика заданной скорости приближения самолета к курсовой линии ВПП, а выход соединен с вторым входом третьего коммутатора, второй блок ограничения сигнала по уровню, вход которого соединен с выходом третьего масштабного блока, а выход - с входом КСУ.
Блок идентификации линейного отклонения  самолета от курсовой линии ВПП содержит третий, четвертый и пятый сумматоры, второй интегратор, второй и третий фильтры, причем выход четвертого сумматора через последовательно соединенные второй и третий фильтры подключен к первому входу пятого сумматора, второй вход которого соединен с выходом второго интегратора, первый и второй входы третьего сумматора соединены соответственно с выходами второго фильтра и второго блока идентификации скорости отклонения самолета от курсовой линии ВПП, первый инвертирующий и второй входы четвертого сумматора подключены соответственно к выходам второго интегратора и блока перемножения сигналов, вход второго интегратора соединен с выходом третьего сумматора а выход пятого сумматора является выходом блока.
самолета от курсовой линии ВПП содержит третий, четвертый и пятый сумматоры, второй интегратор, второй и третий фильтры, причем выход четвертого сумматора через последовательно соединенные второй и третий фильтры подключен к первому входу пятого сумматора, второй вход которого соединен с выходом второго интегратора, первый и второй входы третьего сумматора соединены соответственно с выходами второго фильтра и второго блока идентификации скорости отклонения самолета от курсовой линии ВПП, первый инвертирующий и второй входы четвертого сумматора подключены соответственно к выходам второго интегратора и блока перемножения сигналов, вход второго интегратора соединен с выходом третьего сумматора а выход пятого сумматора является выходом блока.
Первый блок идентификации сигнала скорости VZ1 отклонения самолета от курсовой линии ВПП содержит шестой сумматор, первый тригонометрический блок /sin (х)/, четвертый фильтр и третий блок перемножения сигналов, причем первый вход шестого сумматора подключен к выходу датчика текущего курса самолета ψ, а второй инвертирующий вход - к выходу датчика курсового угла ВПП ψВПП, входы третьего блока перемножения сигналов соединены с выходами четвертого фильтра и первого тригонометрического блока /y=sin(x)/, вход которого подключен к выходу шестого сумматора, вход четвертого фильтра подключен к выходу датчика скорости полета, а выход блока перемножения сигналов является выходом блока.
Второй блок идентификации сигнала скорости VZ2 отклонения самолета от курсовой линии ВПП содержит последовательно соединенные второй тригонометрический блок /tg(x)/, четвертый масштабный блок, седьмой сумматор, третий интегратор, восьмой сумматор, четвертый интегратор и девятый сумматор с инвертирующим входом, пятый и шестой масштабные блоки, причем вход второго тригонометрического блока подключен к выходу датчика угла крена γ самолета, второй вход девятого сумматора соединен с выходом блока идентификации линейного отклонения самолета  от курсовой линии ВПП, выход девятого сумматора через пятый и шестой масштабные блоки соединены соответственно с вторыми входами седьмого и восьмого сумматоров, а выход третьего интегратора является выходом блока.
от курсовой линии ВПП, выход девятого сумматора через пятый и шестой масштабные блоки соединены соответственно с вторыми входами седьмого и восьмого сумматоров, а выход третьего интегратора является выходом блока.
Обеспечение стабильности динамических характеристик, повышение быстродействия процессов захода на посадку на первом этапе в условиях разброса начальных условий по боковому отклонению Z от оси ВПП, начальному курсу ψ самолета и скорости V достигается за счет того, что вместо вывода самолета на заданный фиксированный угол подхода к курсовой линии  , используемому в прототипе, при любых начальных условиях обеспечивается, в отличии от прототипа, приближение самолета к оси ВПП с постоянной заранее заданной скоростью VZ.
, используемому в прототипе, при любых начальных условиях обеспечивается, в отличии от прототипа, приближение самолета к оси ВПП с постоянной заранее заданной скоростью VZ.
Обеспечение на втором этапе захода на посадку постоянных динамических характеристик процессов стабилизации самолета на курсовой линии ВПП независимо от дальности до ВПП достигается за счет использования в законе формирования заданного угла крена γзад сигналов линейного отклонения и скорости линейного отклонения от курсовой линии ВПП вместо углового отклонения и угловой скорости отклонения от оси ВПП, используемых в прототипе.
Сущность изобретения поясняется следующими фигурами:
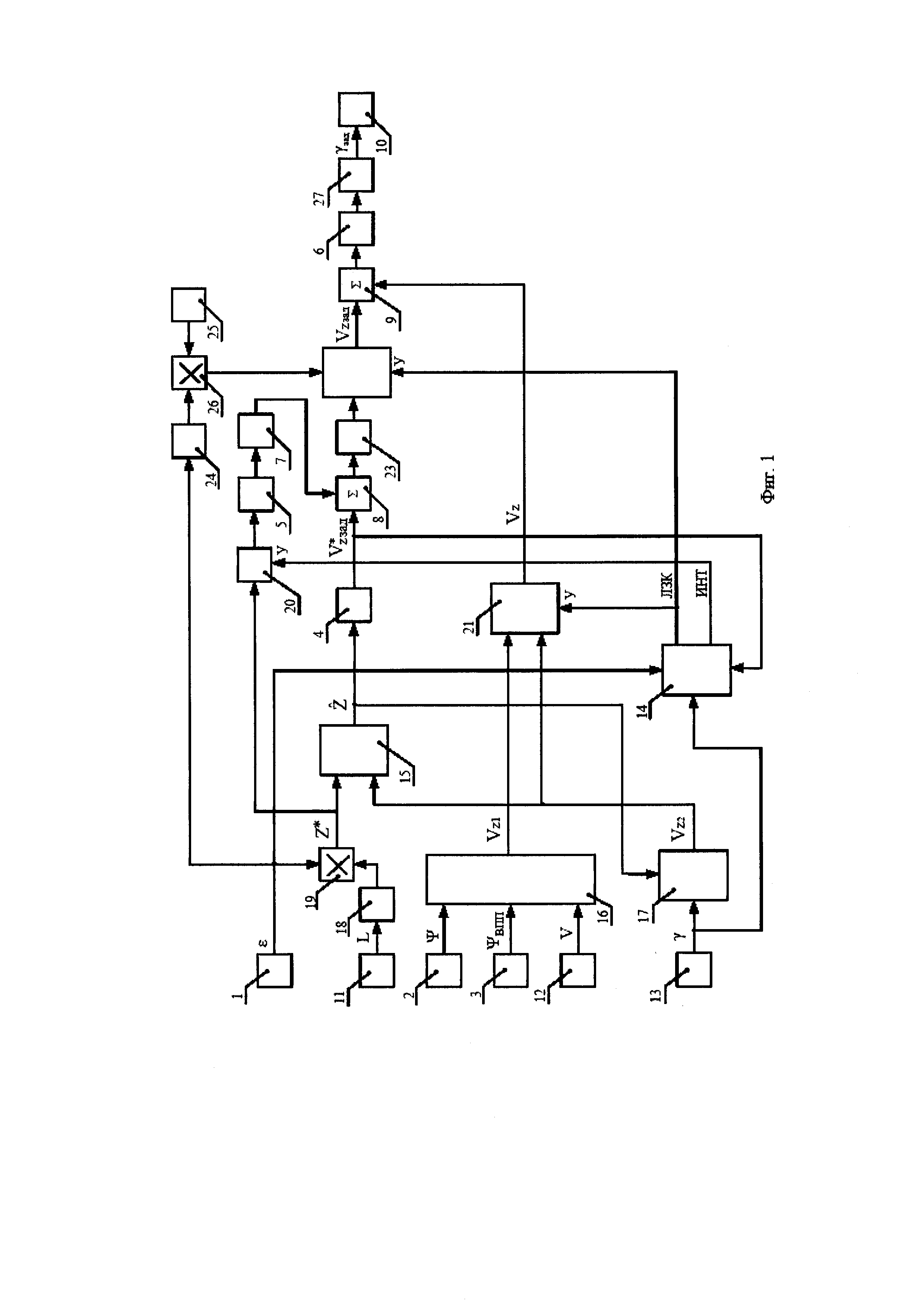
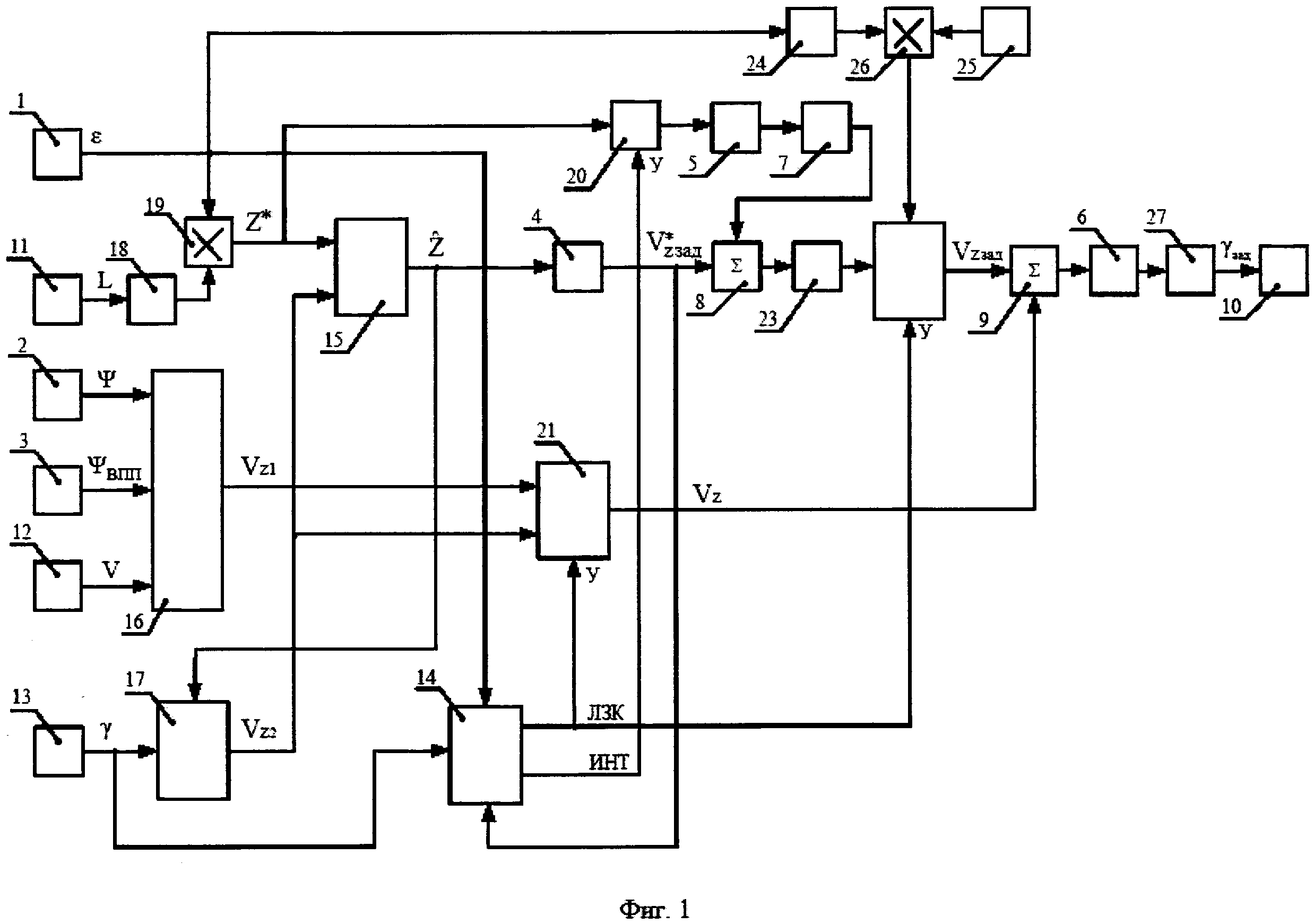
на фиг. 1 изображена структура системы автоматического управления боковым движением самолета при заходе на посадку;
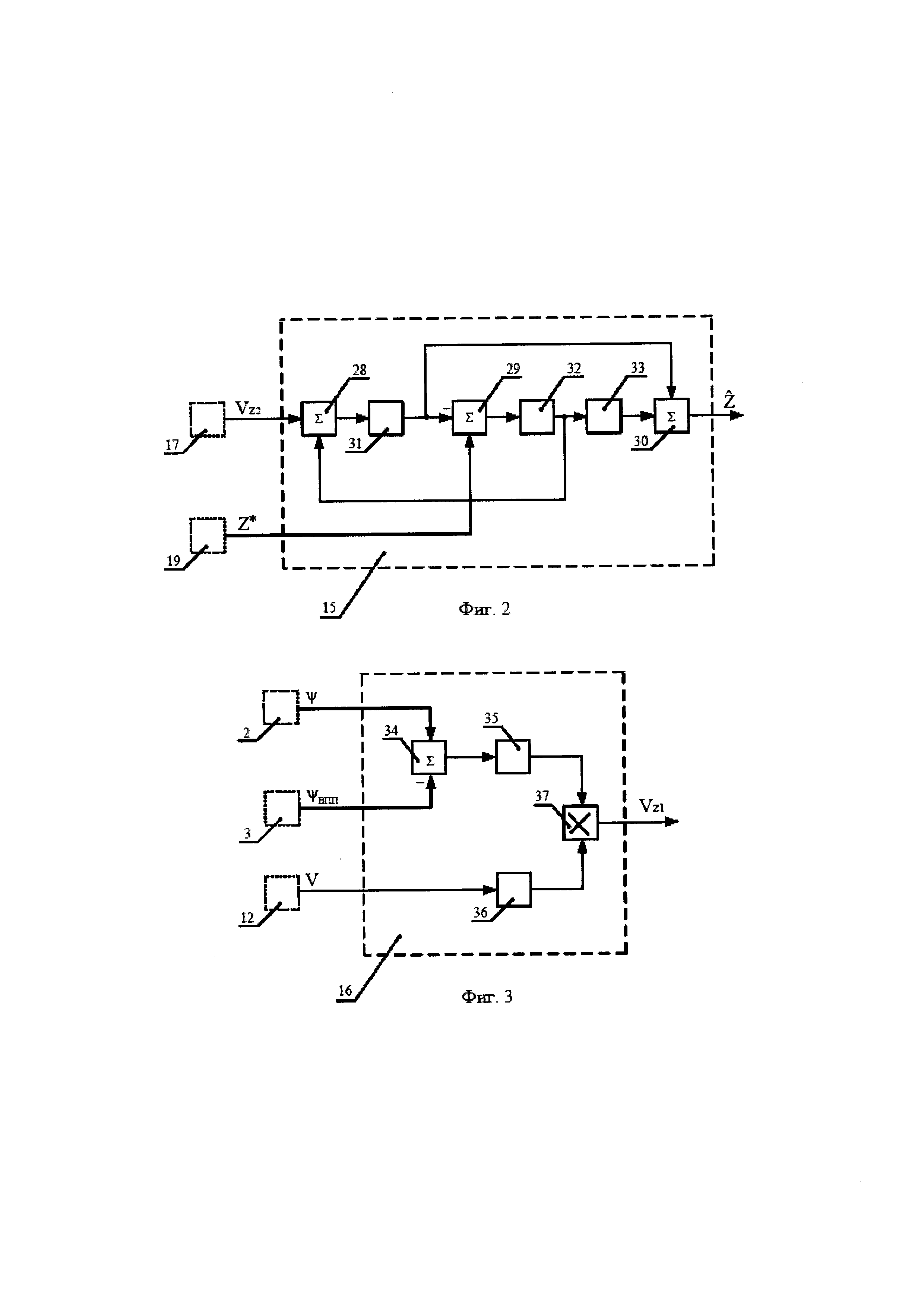
на фиг. 2 представлена структура блока формирования сигнала бокового отклонения самолета от курсовой линии ВПП;
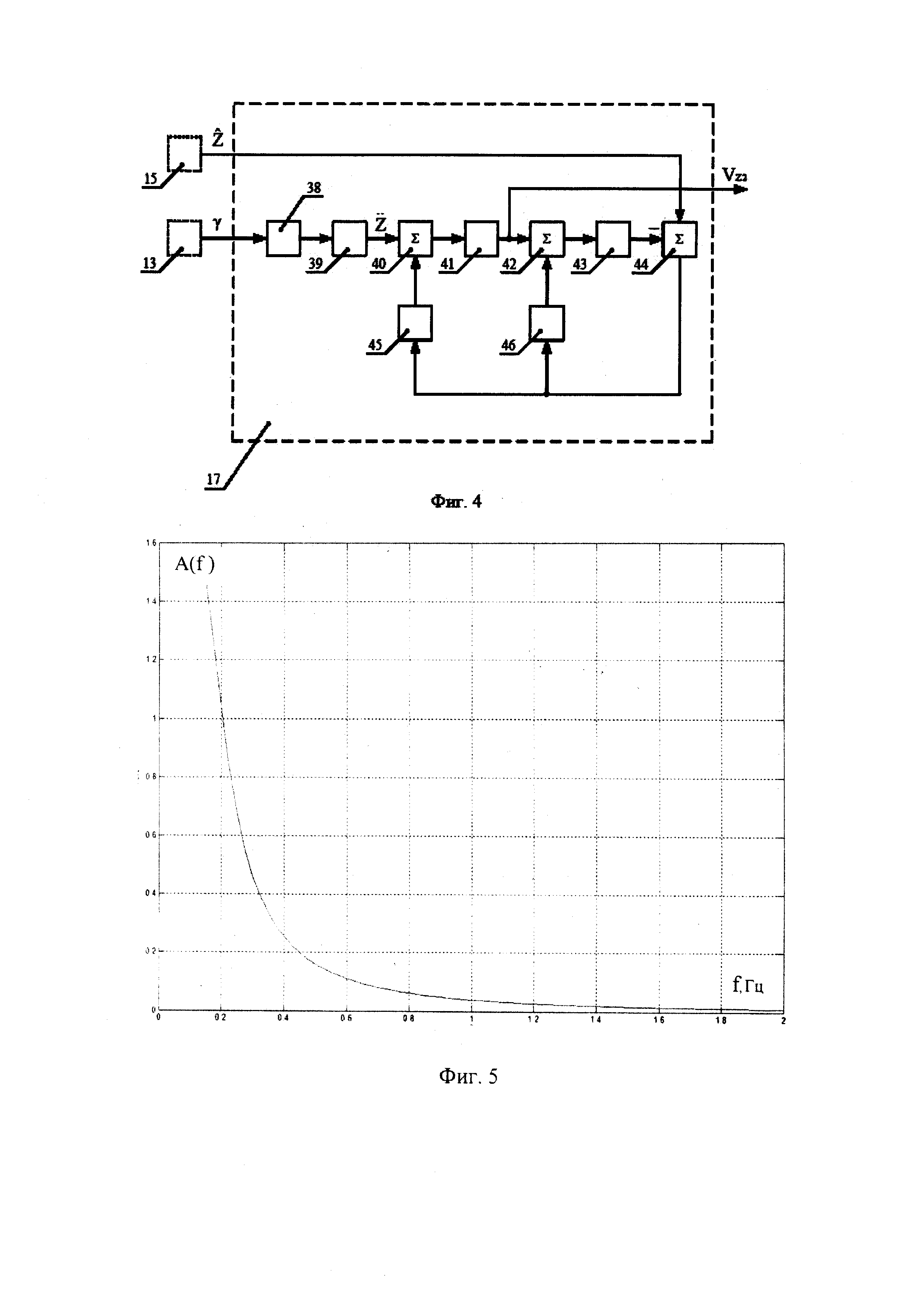
на фиг. 3, 4 представлены структуры соответственно первого и второго блоков формирования сигналов скорости отклонения самолета от курсовой линии ВПП;
на фиг. 5 представлена амплитудно-частотная характеристика (АЧХ) блока формирования сигнала бокового отклонения самолета от курсовой линии ВПП;
На фиг. 1-5 использованы следующие обозначения:
ε - сигнал углового отклонения самолета от оси ВПП;
ψ - сигнал текущего курса самолета;
ψВПП - курсовой угол ВПП;
L - дальность самолета до наземного курсового радиомаяка (КРМ);
V - скорость полета самолета;
γ - сигнал угла крена самолета;
Z*,  - сигналы оценок линейного отклонения самолета от оси ВПП;
- сигналы оценок линейного отклонения самолета от оси ВПП;
VZ1, VZ2 - сигналы оценок скорости линейного отклонения самолета от оси ВПП;
VZ зад,  - заданные значения скорости линейного отклонения самолета от оси ВПП;
- заданные значения скорости линейного отклонения самолета от оси ВПП;
 - линейное боковое ускорение самолета относительно оси ВПП;
- линейное боковое ускорение самолета относительно оси ВПП;
γзад - сигнал заданного угла крена самолета;
f - частота синусоидального сигнала, используемого при снятии АЧХ;
A(f) - численное значение АЧХ;
У - управляющий вход коммутаторов;
1 - датчик углового отклонения е самолета от оси ВПП;
2 - датчик текущего курса самолета ψ;
3 - датчик курсового угла ВПП ψВПП;
4, 5, 6, 39, 45, 46 - первый, второй, третий, четвертый, пятый и шестой масштабные блоки соответственно;
7, 31, 41, 43 - первый, второй, третий и четвертый интеграторы;
8, 9, 28, 29, 30, 34, 40, 42, 44 - первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой и девятый сумматоры соответственно;
10 - комплексная система управления самолетом для отработки заданного угла крена (КСУ);
11 - датчик дальности самолета до наземного курсового радиомаяка (КРМ);
12 - датчик скорости полета самолета;
13 - датчик угла крена γ самолета;
14 - блок логики;
15 - блок идентификации линейного отклонения самолета от курсовой линии ВПП;
16, 17 - первый и второй блоки идентификации скорости линейного отклонения самолета от курсовой линии ВПП;
18, 32, 33, 36 - первый, второй, третий и четвертый фильтры;
19, 26, 37 - первый, второй и третий блоки перемножения сигналов;
20, 21, 22 - первый, второй и третий коммутаторы сигналов;
23, 27 - первый и второй блоки ограничения сигналов по уровню;
24 - блок определения знака входного сигнала /у=sign(x)/;
25 - датчик заданной скорости приближения самолета к курсовой линии ВПП;
35, 38 - первый /y=sin(x)/ и второй /y=tg(x)/ тригонометрические блоки. Заявляемая система автоматического управления боковым движением самолета при заходе на посадку работает следующим образом.
На втором выходе блока логики 14 формируется сигнал ЛЗК («Линейная Зона Курса» - признак входа в линейную зону сигнала КРМ или выхода из нее) следующим образом:
ЛЗК="0" при |ε|>1,85° в ситуации нахождения самолета вне линейной зоны сигнала КРМ и приближения к ней;
ЛЗК="0" при |ε|>1,95° в ситуации выхода самолета из линейной зоны сигнала КРМ;
ЛЗК="1" в остальных случаях (когда самолет находится в линейной зоне сигнала КРМ).
На первом этапе захода на посадку, когда самолет находится вне линейной зоны сигнала КРМ и приближается к ней, сигнал ЛЗК="0". Поступая на управляющие входы второго 21 и третьего 22 коммутаторов, этот сигнал обеспечивает:
- подключение сигнала VZ1 оценки скорости линейного отклонения самолета от оси ВПП с выхода блока 16 через первый вход коммутатора 21 и его выход к второму входу сумматора 9;
- подключение сигнала с выхода блока перемножения сигналов 26, через второй вход коммутатора 22 и его выход к первому входу сумматора 9; в этом случае сигнал на выходе коммутатора 22 равен VZ зад=(45⋅Sign ε), где 45 - сигнал с выхода датчика 25 заданной скорости приближения самолета к курсовой линии ВПП, Sign ε - сигнал знака сигнала ε, поступающий с выхода блока 24.
Сигнал с выхода сумматора 9, проходя через масштабный блок 6 и блок 27 ограничения сигнала по уровню, формирует на выходе последнего сигнал γзад=k6⋅(VZ зад-VZ1), где - масштабный коэффициент масштабного блока блока 6, поступающий на вход КСУ 10. Самолет, взаимодействуя с КСУ 10, отрабатывает сигнал γзад до тех пор, пока сигнал VZ1 на выходе блока 16 не станет равным VZ зад=+45 (или - 45, в зависимости от стороны подхода самолета к оси ВПП). Тем самым самолет приближается к оси ВПП с постоянной скоростью VZ зад до тех пор, пока не окажется в линейной зоне изменения сигнала ε. Сигнал VZ1 оценки скорости линейного отклонения самолета от оси ВПП формируется в блоке 16 на основании зависимости VZ1=V⋅Sin(ψ-ψВПП) ([3], с. 23, формула (1.13)). При отсутствии бокового ветра, когда угол сноса β≈0, как следует из (1.13), сигнал VZ1 совпадает с истинной скоростью VZ отклонения самолета от оси ВПП. Фильтр 36 используется в блоке 16 для подавления помех в сигнале V скорости полета.
На втором этапе захода на посадку - на этапе вывода самолета на курсовую линию ВПП с последующей точной стабилизацией положения самолета на этой линии, самолет находится в линейной зоне сигнала КРМ. Сигнал VZ1 далее не используется из-за погрешностей, обусловленных боковыми ветровыми возмущениями, способными вызвать статические ошибки стабилизации самолета на курсовой линии ВПП. На этом этапе захода на посадку на втором выходе блока логики 14 формируется сигнал ЛЗК="1", который, поступая на управляющие входы коммутаторов 21 и 22, обеспечивает:
- подключение сигнала VZ2 оценки скорости линейного отклонения самолета от оси ВПП с выхода блока 17 через второй вход коммутатора 21 и его выход к второму входу сумматора 9;
- подключение сигнала с выхода блока 23 ограничения сигнала по уровню через первый вход коммутатора 22 и его выход к первому входу сумматора 9.
Таким образом, на втором этапе захода на посадку, как следует из рассмотрения фиг. 1, закон управления САУ (сигнал на выходе блока 27) имеет вид

где k4, k5, k6 - масштабные коэффициенты соответственно блоков 4, 5, 6;
 - представление операции интегрирования в соответствии с преобразованиям-Лапласа.
- представление операции интегрирования в соответствии с преобразованиям-Лапласа.
Сигнал VZ2 формируется следующим образом.
Оценка  линейного отклонения самолета от оси ВПП соответствует истинному значению отклонения Z самолета от оси ВПП
линейного отклонения самолета от оси ВПП соответствует истинному значению отклонения Z самолета от оси ВПП  , динамика процессов в блоке 17 (фиг. 4) описывается следующей системой дифференциальных уравнений:
, динамика процессов в блоке 17 (фиг. 4) описывается следующей системой дифференциальных уравнений:


где y - сигнал на выходе интегратора 43, k45 и k46 - масштабные коэффициенты блоков 45 и 46. Сигнал  формируется в блоке 17 с помощью тригонометрического блока 38 и масштабного блока 39 в соответствии с известной формулой
формируется в блоке 17 с помощью тригонометрического блока 38 и масштабного блока 39 в соответствии с известной формулой  , справедливой для координированного разворота самолета с углом крена γ.
, справедливой для координированного разворота самолета с углом крена γ.
Вводя в рассмотрение оператор дифференцирования  , перепишем уравнения (2) в виде
, перепишем уравнения (2) в виде

Из системы уравнений (3) с учетом того, что  , получим решение относительно VZ2:
, получим решение относительно VZ2:

откуда, поскольку  и
и  , получается, что
, получается, что

Из формулы (5) следует, что сигнал VZ2 оценки скорости линейного отклонения самолета от оси ВПП, формируемый на выходе блока 17 по схеме, представленной на фиг. 4, точно соответствует истинному значению скорости  линейного отклонения самолета от оси ВПП.
линейного отклонения самолета от оси ВПП.
Сигнал Z* является первичной оценкой линейного отклонения Z самолета от курсовой линии ВПП. Способ его получения аналогичен зависимости, приведенной в [1] (с. 123, формула 3.70): Z*=L⋅ε. Фильтр 18 используется в схеме, представленной на фиг. 1, для подавления помех в сигнале L дальности до КРМ. Непосредственное использование сигнала Z* для формирования командного сигнала γзад сопряжено с отрицательным воздействием на угловое и траекторное движение самолета помех, содержащихся в сигнале ε. Известны по крайней мере два вида таких помех. Первая из них связана с неизбежным на практике искривлением линий равных сигналов КРМ ([1], с. 135, второй абзац снизу, рис. 3.38)). Второй источник помех - т.н. «герцовка», когда в сигнале ε присутствует близкий к гармоническому сигнал с частотой ~ 1 Гц. Данные помехи приводят к «ненужному раскачиванию самолета» ([1], с. 136, четвертый абзац снизу) и отрицательно «влияют на динамику угловых движений самолета» ([1], с. 136, третий абзац снизу).
Для фильтрации указанных помех и более точного определения линейного отклонения самолета от оси ВПП предназначен блок 15. Блок работает следующим образом.
Примем во внимание, что сигнал VZ2 на первом входе блока 15 имеет вид

где ξ0 - помеха в виде постоянной составляющей, обусловленная статической ошибкой измерения угла крена самолета в датчике 13, и что сигнал Z* на первом входе блока 15 тоже содержит помеху

где ξ1 - помеха, вызванная искривлением линий равных сигналов КРМ и «герцовкой» в сигнале ε. Сигнал Y на выходе интегратора 31 (фиг. 2) в этом случае записывается в виде

где w - передаточная функция фильтра 32. Учитывая, что  , формулу (8) перепишем в виде
, формулу (8) перепишем в виде  , откуда
, откуда

Из формулы (9) следует, что:
- полезная составляющая в сигнале Y на выходе интегратора 31 строго равна линейному отклонению Z самолета от оси ВПП при любой сложности фильтра 32 с передаточной функцией w;
- соответствующим выбором структуры этого фильтра можно управлять степенью подавления помех ξ0 и ξ1.
В соответствии с фиг. 2 сигнал  на выходе блока 15 равен
на выходе блока 15 равен
 ,
,
где w1 - передаточная функция фильтра 33, откуда

Заметим, что при любых передаточных функциях w, w1 помеха ξ0, являясь постоянной составляющей, из сигнала  устраняется. Так, например, в случае, когда передаточные функции фильтров 32 и 33 соответствуют апериодическим звеньям
устраняется. Так, например, в случае, когда передаточные функции фильтров 32 и 33 соответствуют апериодическим звеньям  и
и  с постоянными времени Т и T1, имеем
с постоянными времени Т и T1, имеем
 , т.е. постоянный сигнал ξ0 дифференцируется и становится равным нулю. Таким образом, формула (10) упрощается
, т.е. постоянный сигнал ξ0 дифференцируется и становится равным нулю. Таким образом, формула (10) упрощается

Из формулы (11) следует, что:
- полезная составляющая в сигнале  на выходе блока 15 точно соответствует линейному отклонению Z самолета от оси ВПП при любой сложности фильтров 32 и 33;
на выходе блока 15 точно соответствует линейному отклонению Z самолета от оси ВПП при любой сложности фильтров 32 и 33;
- помеха ξ1 эффективно подавляется соответствующим выбором структуры фильтров 32 и 33.
Так, при  и при
и при  помеха ξ1 подавляется, начиная с частоты f=0,2 Гц, причем на частоте «герцовки» f=1 Гц помеха ξ1 в сигнале
помеха ξ1 подавляется, начиная с частоты f=0,2 Гц, причем на частоте «герцовки» f=1 Гц помеха ξ1 в сигнале  уменьшается более, чем в 20 раз (см. фиг. 5).
уменьшается более, чем в 20 раз (см. фиг. 5).
Таким образом, используемый закон управления (1) в заявляемой системе автоматического управления боковым движением самолета при заходе на посадку окончательно имеет следующий вид:

где k4, k5, k6 - масштабные коэффициенты соответственно блоков 4, 5, 6 (фиг. 1).
Интегральная составляющая  в законе управления (12), как известно, ухудшает динамические характеристики процессов захода на посадку /1, с. 148, первый абзац сверху). Поэтому интегратор 7 (фиг. 1) включается в работу с помощью сигнала ИНТ («ИНТегратор»), формируемого на первом выходе блока логики 14 при малых отклонениях самолета от оси ВПП (в «малом»):
в законе управления (12), как известно, ухудшает динамические характеристики процессов захода на посадку /1, с. 148, первый абзац сверху). Поэтому интегратор 7 (фиг. 1) включается в работу с помощью сигнала ИНТ («ИНТегратор»), формируемого на первом выходе блока логики 14 при малых отклонениях самолета от оси ВПП (в «малом»):
ИНТ="1", если ЛЗК="1" И  И
И  ; иначе ИНТ="0",
; иначе ИНТ="0",
где И - операция логического преобразования "И",  - сигнал на выходе масштабного блока 4. При сигнале ИНТ="1", поступающем на управляющий вход коммутатора 20, сигнал Z* с выхода блока перемножения сигналов 19 через коммутатор 20 и масштабный коэффициент масштабного блока 5 подается на вход интегратора 7. В результате его работы сигнал Z* и, соответственно, сигнал ε углового отклонения от оси ВПП становятся равными нулю. Это означает, что самолет движется точно по курсовой линии ВПП, т.е. заявляемая САУ обладает свойством астатизма. При значении сигнала ИНТ="0" интегратор 7 в работу не включается.
- сигнал на выходе масштабного блока 4. При сигнале ИНТ="1", поступающем на управляющий вход коммутатора 20, сигнал Z* с выхода блока перемножения сигналов 19 через коммутатор 20 и масштабный коэффициент масштабного блока 5 подается на вход интегратора 7. В результате его работы сигнал Z* и, соответственно, сигнал ε углового отклонения от оси ВПП становятся равными нулю. Это означает, что самолет движется точно по курсовой линии ВПП, т.е. заявляемая САУ обладает свойством астатизма. При значении сигнала ИНТ="0" интегратор 7 в работу не включается.
Блоки 23 и 27 ограничения сигналов по уровню используются в САУ для обеспечения безопасности пилотирования самолета при заходе на посадку. С помощью блока 23 ограничивается предельно допустимое значение скорости  линейного отклонения самолета от оси ВПП. Блок 27 ограничивает величину заданного угла крена самолета γзад в процессе выполнения захода на посадку.
линейного отклонения самолета от оси ВПП. Блок 27 ограничивает величину заданного угла крена самолета γзад в процессе выполнения захода на посадку.
Комплексная система управления 10 работает совместно с самолетом и обеспечивает соответствие текущего угла крена γ заданному значению γзад. КСУ является сложным самостоятельным объектом, структура которого определяется разработчиком конкретного типа самолета.

Система объективного контроля
Система автоматического управления самолетом при снижении
Способ корректировки облика летательного аппарата по величине радиолокационной заметности
Универсальный имитатор авиационных средств поражения и способ проверки работы бортовых систем авиационного вооружения с помощью универсального имитатора авиационных средств поражения
Электромагнитный клапан
Струйный датчик уровня
Система автоматического управления самолетом при наборе и стабилизации заданной высоты полета
Клапан обратный
Сливной кран
Система дистанционного управления самолетом в боковом движении
Способ определения чувствительности опухоли легкого к терапии ингибиторами тирозинкиназ
Способ вертебропластики
Устройство обнаружения факта наведения самонаводящегося по радиоизлучению оружия на радиоэлектронное средство, защищенное отвлекающим устройством
Комплексная система управления траекторией летательного аппарата при заходе на посадку
Электромеханический мини-привод поступательного действия
Модульный молекулярный конъюгат для направленной доставки генетических конструкций и способ его получения
Система автоматического управления самолетом при заходе на посадку
Молекулярные конъюгаты с поликатионным участком и лигандом для доставки в клетку и ядро клетки днк и рнк
Способ вертебропластики
Система автоматического управления самолетом при снижении

