Результат интеллектуальной деятельности: СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ НАБОРЕ И СТАБИЛИЗАЦИИ ЗАДАННОЙ ВЫСОТЫ ПОЛЕТА
Вид РИД
Изобретение
Изобретение относится к области авиационной техники, а именно, к системе автоматического управления самолетом в режиме набора и стабилизации заданной высоты полета.
Выполнение режима набора и последующей стабилизации заданной высоты полета маневренного самолета включает в себя следующие этапы:
- разгон самолета (за счет изменения летчиком тяги двигателя в режиме стабилизации исходной высоты полета Н=Н0, где H0 - исходная высота полета, H - текущая высота полета) до определенной скорости V0=Vзад-ΔV, где Vзад - заданная скорость самолета во время выполнения режима набора высоты; V0 - скорость самолета в момент включения режима набора высоты; ΔV - отклонение текущей скорости самолета от заданной в момент включения режима набора высоты;
- перевод рычага управления двигателем (РУД) самолета в новое фиксированное положение («максимал»), включение режима набора высоты до нового заданного значения Hзад>>H0 с одновременной стабилизацией текущей скорости самолета на заданном значении V=Vзад;
- включение автоматического режима стабилизации заданной высоты полета Hзад в момент достижения текущего значения высоты полета до величины H*=Hзад-ΔH, где ΔH - заранее заданное упреждение по высоте (~100÷200 м).
При этом параметры полета H0, Hзад, Vзад, V0 определяются летчиком при выполнении режима набора и стабилизации заданной высоты полета.
Известна система автоматического управления высотой полета самолета, в которой используются сигналы угла тангажа, угловой скорости тангажа, высоты и сигнал скорости изменения высоты, получаемый путем дифференцирования сигнала высоты (Боднер В.А. Системы управления летательными аппаратами. М., Машиностроение, 1973, 506 с. - с. 139, рис. 4.1). Недостатком данной системы является то, что в ней не предусмотрена стабилизация скорости самолета во время набора высоты при значительном рассогласовании между заданной и исходной высотами полета, например, при Hзад=10000 м и H0=1000 м.
Также известна «Система автоматического управления вертикальной скоростью полета самолета» (патент RU 2056328 С1 от 20.03.1996 г.), которая содержит блок формирования сигнала управления рулем высоты, автомат тяги, блок формирования программной траектории, блок формирования сигнала заданной вертикальной скорости, блоки коррекции программной траектории и сигнала вертикальной скорости, два сумматора, задатчик и датчик числа Маха, а также датчики высоты полета, вертикальной скорости и температуры наружного воздуха. Однако для решения конкретно рассматриваемого варианта режима автоматического набора высоты маневренного самолета данная двухконтурная система управления излишне сложна, так как при наборе высоты кроме стабилизации числа Маха в ней требуется программное управление тягой двигателя в зависимости от высоты полета с помощью специальной подсистемы управления - автомата тяги. Кроме того, заданная вертикальная скорость в системе формируется программно, что не гарантирует максимальной скороподъемности при конкретных условиях полета.
Наиболее близкой к заявляемой системе является система управления при программном изменении высоты и скорости полета (Гуськов Ю.П., Загайнов Г.И. Управление полетом самолета: учебник для авиационных вузов. М.: Машиностроение, 1980, 213 с. - ил., рис. 6.5.4, формула (6.5.10), с. 180, 181), которая основана на стабилизации скорости самолета относительно заданного значения (в том числе программно изменяемого) и на формировании управляющего сигнала в виде суммы сигнала разности между текущим V и заданным Vзад значениями скорости самолета и сигнала, полученного интегрированием этой разности. В качестве управляющего сигнала избран сигнал заданного угла тангажа ϑзад, отрабатываемый затем специальным контуром отработки угла тангажа, исполнительным органом которого является руль высоты самолета. Данная система управления самолетом при наборе высоты содержит датчики заданной и текущей скорости самолета, первый и второй сумматоры, первый и второй масштабные блоки, интегратор, рулевой привод и руль высоты самолета, причем выходы датчиков заданной и текущей скорости самолета соединены с входами первого сумматора, вход интегратора соединен с выходом первого масштабного блока, входы второго сумматора подключены к выходам интегратора и второго масштабного блока, а выход рулевого привода соединен с входом руля высоты самолета. Кроме того, система управления содержит блок отработки заданного угла тангажа, вход которого подключен к выходу второго сумматора, а выход - к входу рулевого привода, входы первого и второго масштабных блоков соединены с выходом первого сумматора. Однако, в связи с большим распространением на маневренных самолетах систем с управляющим сигналом по нормальной перегрузке, применение на таких самолетах системы, выбранной в качестве прототипа, сопряжено со следующими недостатками:
- требуется предварительное создание дополнительного контура управления углом тангажа, что усложняет саму систему управления,
- не гарантируется отсутствие потери высоты при значительном отклонении скорости самолета от расчетного значения в меньшую сторону, что может быть критичным на малых высотах на начальном этапе набора высоты полета,
- системе с углом тангажа в качестве координаты управления свойственны заниженные характеристики ветроустойчивости,
- предполагается использование автомата тяги с программным изменением положения РУД самолета.
Техническим результатом заявляемой системы автоматического управления самолетом при наборе и стабилизации заданной высоты полета является повышение ее точности, быстродействия, надежности и безопасности пилотирования, а также упрощение системы управления.
Технический результат достигается тем, что система автоматического управления самолетом при наборе и стабилизации заданной высоты полета содержит датчики заданной и текущей скорости самолета, первый и второй сумматоры, первый и второй масштабные блоки, интегратор, рулевой привод и руль высоты самолета, причем выходы датчиков заданной и текущей скорости самолета соединены с входами первого сумматора, выход рулевого привода соединен с рулем высоты, вход интегратора соединен с выходом первого масштабного блока, а входы второго сумматора подключены к выходам интегратора и второго масштабного блока. Дополнительно система включает в себя датчики продольной и нормальной перегрузок, датчик угла атаки, датчик вертикальной скорости самолета, датчики заданной и текущей высоты полета, блок вычисления тригонометрической функции, первый и второй блоки перемножения сигналов, первый и второй блоки формирования сигнала заданной перегрузки, блок ограничения сигналов по величине, блок логики, коммутатор, блок формирования сигнала отработки заданной перегрузки, третий и четвертый сумматоры, первый и второй фильтры, при этом выход первого сумматора через первый фильтр подключен к входам первого и второго масштабных блоков, выход датчика угла атаки через блок вычисления тригонометрической функции подключен к первому входу первого блока перемножения сигналов, второй вход которого соединен с выходом датчика нормальной перегрузки, а выход первого блока перемножения сигналов соединен с первым входом третьего сумматора, второй вход которого соединен с выходом датчика продольной перегрузки, причем выход третьего сумматора соединен с первым входом второго блока перемножения сигналов, второй вход которого соединен с выходом датчика заданной скорости самолета, при этом выход второго блока перемножения сигналов через второй фильтр соединен с первым входом четвертого сумматора, второй вход которого подключен к выходу второго сумматора, выход четвертого сумматора через блок ограничения сигналов по величине подключен к первому входу первого блока формирования сигнала заданной перегрузки, причем ко второму входу первого блока формирования сигнала заданной перегрузки подключен выход датчика вертикальной скорости самолета, выход датчика заданной высоты полета соединен с первыми входами второго блока формирования сигнала заданной перегрузки и блока логики, выход датчика текущей высоты полета соединен со вторыми входами блока логики и второго блока формирования сигнала заданной перегрузки, третий вход которого соединен с выходом датчика вертикальной скорости самолета, при этом выход блока логики соединен с управляющим входом коммутатора, первый и второй входы которого соединены соответственно с выходами первого и второго блоков формирования сигнала заданной перегрузки, выход коммутатора соединен с входом блока формирования сигнала отработки заданной перегрузки, к выходу которого подсоединен рулевой привод.
Первый блок формирования сигнала заданной перегрузки может содержать третий и четвертый масштабные блоки, а также пятый сумматор, при этом вход третьего масштабного блока соединен с выходом блока ограничения сигналов по величине, к входам пятого сумматора подключены выходы третьего масштабного блока и датчика вертикальной скорости самолета, а выход пятого сумматора через четвертый масштабный блок соединен с первым входом коммутатора.
Второй блок формирования сигнала заданной перегрузки может включать в себя шестой и седьмой сумматоры, пятый и шестой масштабные блоки, а также дополнительный блок ограничения сигналов по величине, при этом входы шестого сумматора соединены с выходами датчика текущей высоты полета и датчика заданной высоты полета, а выход шестого сумматора через пятый масштабный блок подключен к входу дополнительного блока ограничения сигналов по величине, причем выходы дополнительного блока ограничения сигналов по величине и датчика вертикальной скорости самолета соединены с двумя входами седьмого сумматора, выход которого через шестой масштабный блок соединен со вторым входом коммутатора.
Быстродействие набора высоты повышается за счет того, что заданная вертикальная скорость самолета, формируемая на выходе второго фильтра, для текущего значения тяги двигателя является максимально возможной, такой именно, при которой скорость самолета сохраняется постоянной. Кроме того, время набора высоты сокращается из-за того, что заданное значение вертикальной скорости самолета, формируемое на выходе блока ограничения сигналов по величине, всегда положительно, тем самым исключаются случаи потери высоты при ее наборе.
Точность выполнения режимов набора и стабилизации заданной высоты полета повышается за счет того, что используется контур отработки перегрузки, реализуемый в первом и втором блоках формирования сигнала заданной перегрузки и в блоке формирования сигнала отработки заданной перегрузки. Дополнительно, указанная точность повышается за счет применения блока ограничения сигналов по величине, формирующего только положительные значения заданной вертикальной скорости самолета и исключающего, тем самым, потерю высоты при ее наборе и стабилизации. Кроме того, за счет своевременного переключения режима набора высоты на режим стабилизации заданной высоты полета блоком логики и коммутатором исключаются динамические ошибки выхода самолета на заданную высоту полета.
Надежность и безопасность пилотирования при выполнении режима набора высоты повышается за счет применения блока ограничения сигналов по величине, в котором ограничивается максимальное положительное значение заданной вертикальной скорости самолета и исключаются ее отрицательные значения. Кроме того, в блоке формирования сигнала отработки заданной перегрузки, применяемом на маневренных самолетах, также предусматривается ограничение максимальных значений действующих на самолет перегрузок.
Заявляемая система автоматического управления самолетом при наборе и стабилизации заданной высоты полета упрощается по сравнению с прототипом, т.к. при выполнении режима набора высоты исключается управление тягой двигателя с помощью сложного автомата тяги. Не требуется также программное изменение скорости самолета в зависимости от текущей высоты полета.
Сущность изобретения поясняется следующими графическими изображениями:
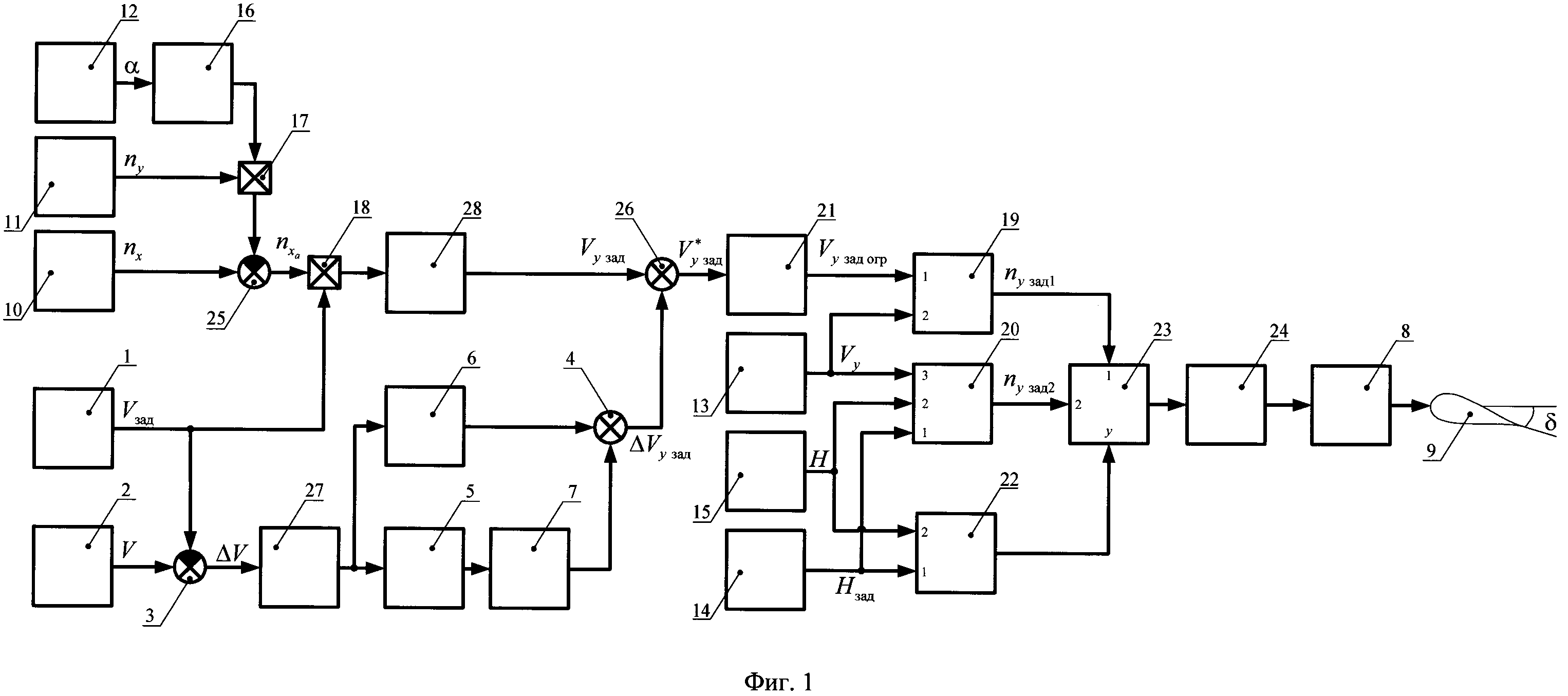
на фиг. 1 изображена система автоматического управления самолетом при наборе и стабилизации заданной высоты полета;
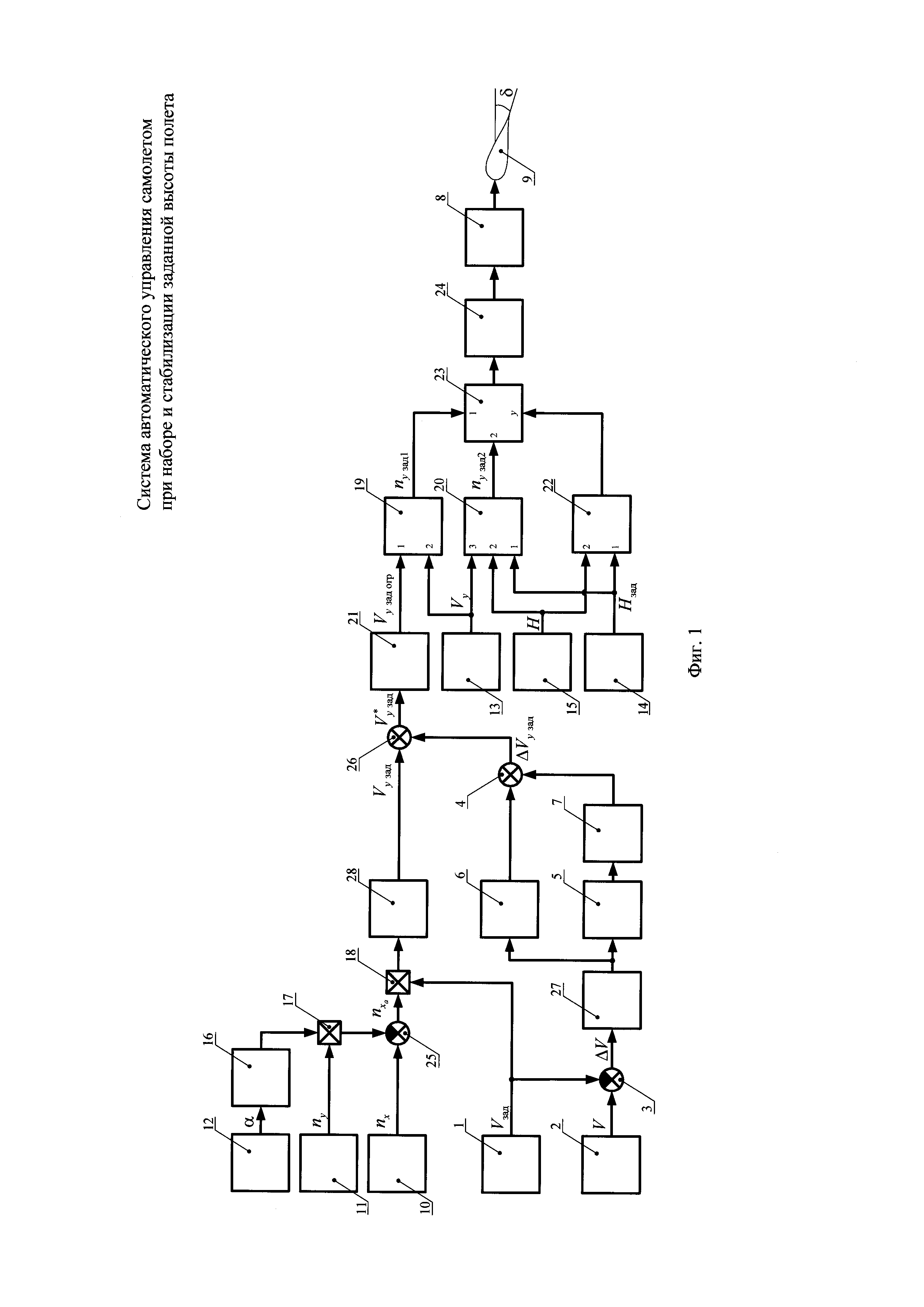
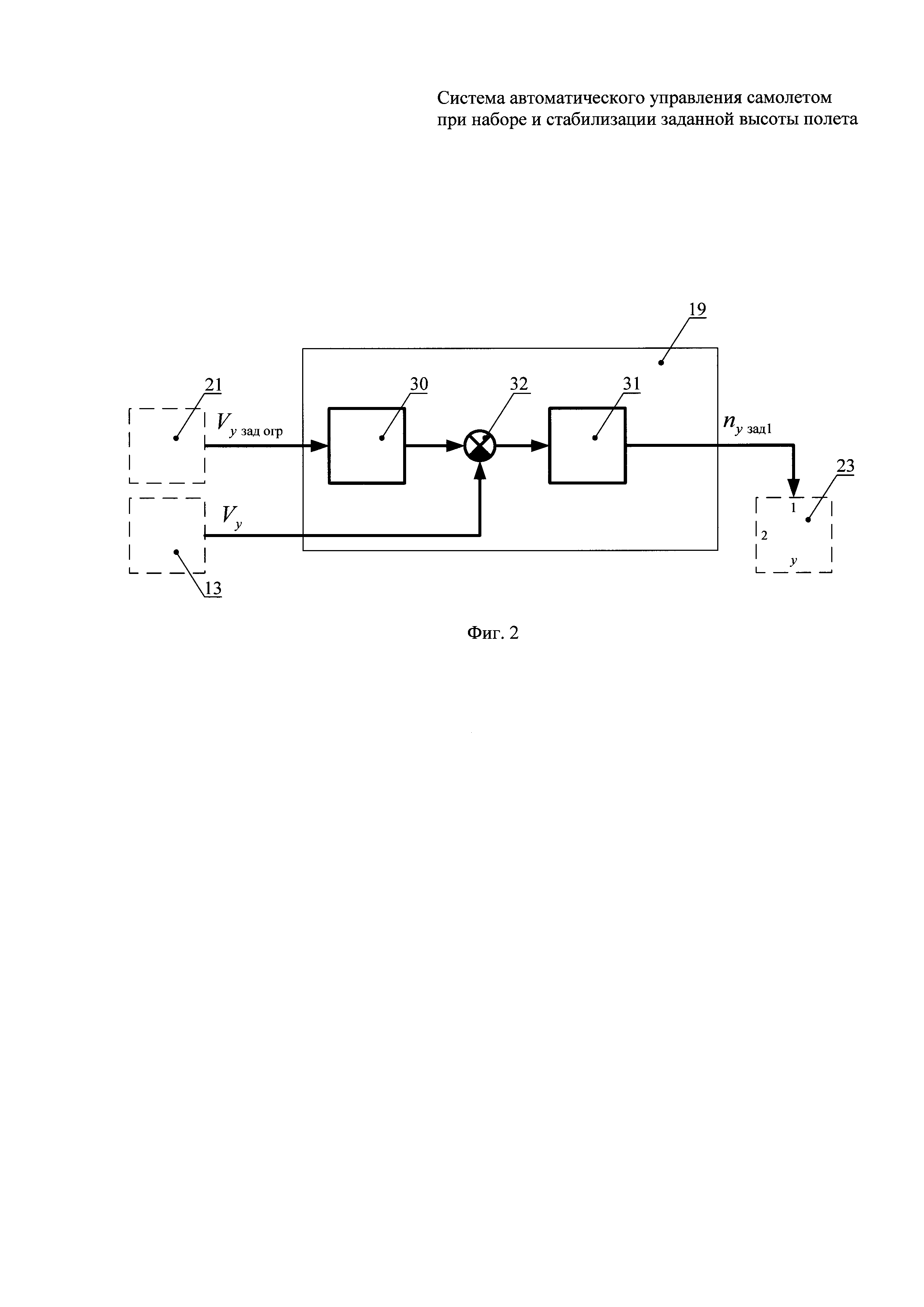
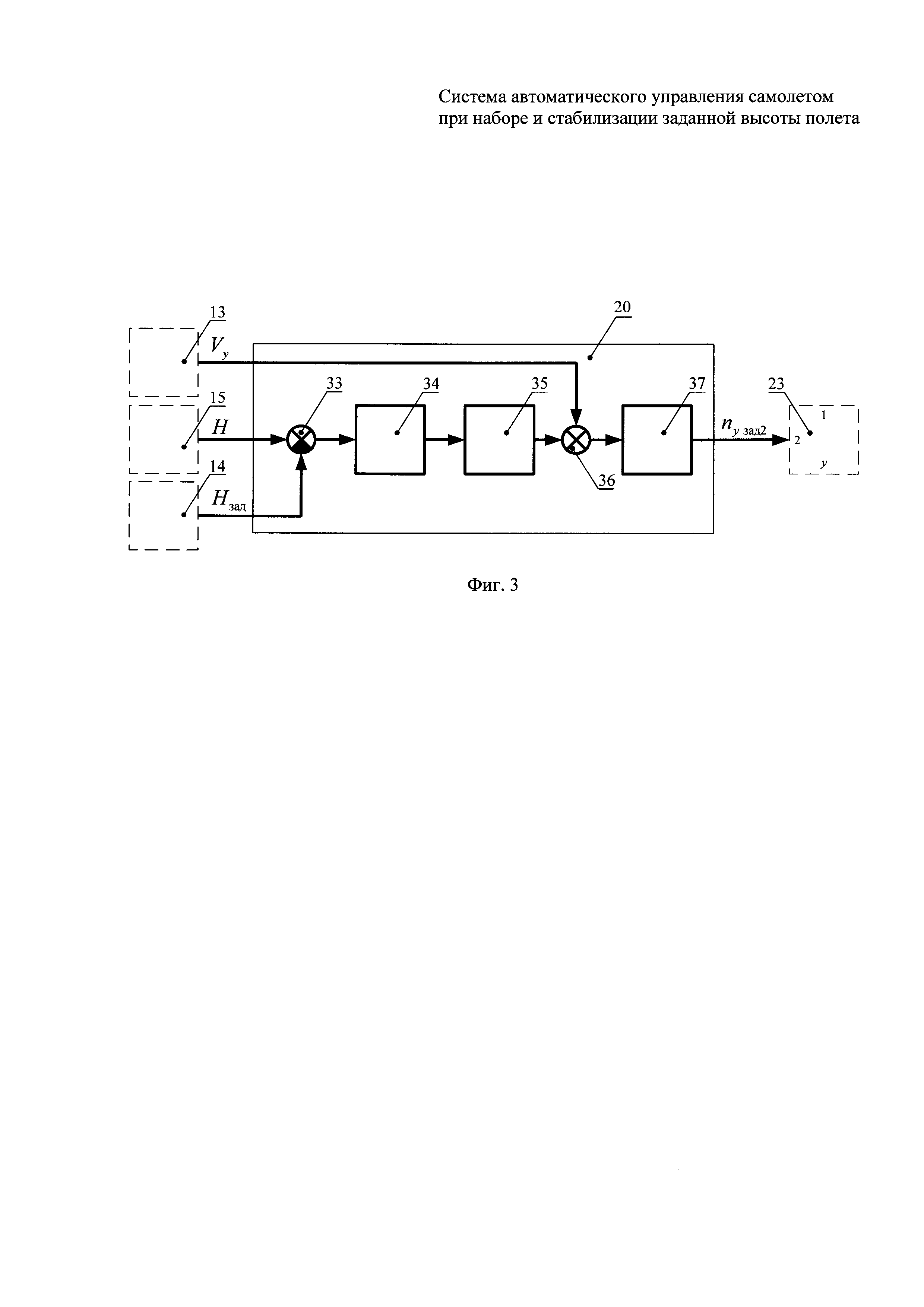
на фиг. 2, 3 показаны примеры исполнения первого и второго блоков формирования сигнала заданной перегрузки, соответственно, в режиме набора высоты и в режиме стабилизации заданной высоты полета.
На фиг. 1-3 использованы следующие обозначения:
α - угол атаки;
δ - угол отклонения руля высоты;
nх - продольная перегрузка (в связанной системе координат);
 - тангенциальная перегрузка (в скоростной системе координат);
- тангенциальная перегрузка (в скоростной системе координат);
nу - нормальная перегрузка (в связанной системе координат);
nу зад1 - заданная перегрузка в режиме набора высоты;
nу зад2 - заданная перегрузка в режиме стабилизации заданной высоты полета;
Н - текущая высота полета;
Hзад - заданная высота полета;
V - текущая скорость самолета;
Vзад - заданная скорость самолета;
Vy - вертикальная скорость самолета;
Vy зад - основная составляющая заданной вертикальной скорости самолета;
ΔVу зад - дополнительная составляющая заданной вертикальной скорости самолета;
 _ суммарный сигнал заданной вертикальной скорости самолета;
_ суммарный сигнал заданной вертикальной скорости самолета;
ΔV=(V-Vзад) - отклонение текущей скорости самолета от заданной;
Vy зад огр - ограниченный по величине сигнал  ;
;
1 - датчик заданной скорости самолета Vзад;
2 - датчик текущей скорости самолета V;
3, 4, 25, 26, 32, 33, 36 - соответственно первый, второй, третий, четвертый, пятый, шестой и седьмой сумматоры;
5, 6, 30, 31, 34, 37 - соответственно первый, второй, третий, четвертый, пятый и шестой масштабные блоки;
7 - интегратор;
8 - рулевой привод;
9 - руль высоты самолета;
10 - датчик продольной перегрузки nх;
11 - датчик нормальной перегрузки nу;
12 - датчик угла атаки α;
13 - датчик вертикальной скорости самолета Vy;
14 - датчик заданной высоты полета Нзад;
15 - датчик текущей высоты полета Н;
16 - блок вычисления тригонометрической функции sinα;
17, 18 - соответственно первый и второй блоки перемножения сигналов;
19 - первый блок формирования сигнала заданной перегрузки (для режима набора высоты);
20 - второй блок формирования сигнала заданной перегрузки (для режима стабилизации заданной высоты полета);
21 - блок ограничения сигналов по величине;
22 - блок логики;
23 - коммутатор;
24 - блок формирования сигнала отработки заданной перегрузки;
27, 28 - соответственно первый и второй фильтры;
35 - дополнительный блок ограничения сигнала по величине.
Система автоматического управления самолетом при наборе и стабилизации заданной высоты полета (фиг. 1) содержит датчики заданной 1 и текущей 2 скорости самолета, первый 3 и второй 4 сумматоры, первый 5 и второй 6 масштабные блоки, интегратор 7, рулевой привод 8 и руль высоты самолета 9. Причем выходы датчиков заданной 1 и текущей 2 скорости самолета соединены с входами первого сумматора 3, выход рулевого привода 8 соединен с рулем высоты 9, вход интегратора 7 соединен с выходом первого масштабного блока 5, а входы второго сумматора 4 подключены к выходам интегратора 7 и второго масштабного блока 6. Также система включает в себя датчики продольной 10 и нормальной 11 перегрузок, датчик угла атаки 12, датчик вертикальной скорости самолета 13, датчики заданной 14 и текущей 15 высоты полета, блок вычисления тригонометрической функции 16, первый 17 и второй 18 блоки перемножения сигналов, первый 19 и второй 20 блоки формирования сигнала заданной перегрузки. Кроме того, данная система содержит блок ограничения сигналов по величине 21, блок логики 22, коммутатор 23, блок формирования сигнала отработки заданной перегрузки 24, третий 25 и четвертый 26 сумматоры, первый 27 и второй 28 фильтры. При этом выход первого сумматора 3 через первый фильтр 27 подключен к входам первого 5 и второго 6 масштабных блоков, выход датчика угла атаки 12 через блок вычисления тригонометрической функции 16 подключен к первому входу первого блока перемножения сигналов 17, второй вход которого соединен с выходом датчика нормальной перегрузки 11, а выход первого блока перемножения сигналов 17 соединен с первым входом третьего сумматора 25, второй вход которого соединен с выходом датчика продольной перегрузки 10. Выход третьего сумматора 25 соединен с первым входом второго блока перемножения сигналов 18, второй вход которого соединен с выходом датчика заданной скорости самолета 1, при этом выход второго блока перемножения сигналов 18 через второй фильтр 28 соединен с первым входом четвертого сумматора 26, второй вход которого подключен к выходу второго сумматора 4. Выход четвертого сумматора 26 через блок ограничения сигналов по величине 21 подключен к первому входу первого блока формирования сигнала заданной перегрузки 19, причем ко второму входу первого блока формирования сигнала заданной перегрузки 19 подключен выход датчика вертикальной скорости самолета 13. Выход датчика заданной высоты полета 14 соединен с первыми входами второго блока формирования сигнала заданной перегрузки 20 и блока логики 22. Выход датчика текущей высоты полета 15 соединен со вторыми входами блока логики 22 и второго блока формирования сигнала заданной перегрузки 20, третий вход которого соединен с выходом датчика вертикальной скорости самолета 13. При этом выход блока логики 22 соединен с управляющим входом коммутатора 23, первый и второй входы которого соединены соответственно с выходами первого 19 и второго 20 блоков формирования сигнала заданной перегрузки. Выход коммутатора 23 соединен с входом блока формирования сигнала отработки заданной перегрузки 24, к выходу которого подсоединен рулевой привод 8.
Первый 19 и второй 20 блоки формирования сигнала заданной перегрузки могут быть выполнены в различной комплектации. В частности, на фиг.2 показан пример исполнения первого блока формирования сигнала заданной перегрузки 19, который содержит третий 30 и четвертый 31 масштабные блоки, а также пятый сумматор 32. При этом вход третьего масштабного блока 30 соединен с выходом блока ограничения сигналов по величине 21. К входам пятого сумматора 32 подключены выходы третьего масштабного блока 30 и датчика вертикальной скорости самолета 13, а выход пятого сумматора 32 через четвертый масштабный блок 31 соединен с первым входом коммутатора 23.
На фиг. 3 показан пример исполнения второго блока формирования сигнала заданной перегрузки 20, который включает в себя шестой 33 и седьмой 36 сумматоры, пятый 34 и шестой 37 масштабные блоки, а также дополнительный блок ограничения сигнала по величине 35. При этом входы шестого сумматора 33 соединены с выходами датчика текущей высоты полета 15 и датчика заданной высоты полета 14, а выход шестого сумматора 33 через пятый масштабный блок 34 подключен к входу дополнительного блока ограничения сигнала по величине 35. Причем выходы дополнительного блока ограничения сигнала по величине 35 и датчика вертикальной скорости самолета 13 соединены с двумя входами седьмого сумматора 36, выход которого через шестой масштабный блок 37 соединен со вторым входом коммутатора 23.
Заявляемая система автоматического управления самолетом при наборе и стабилизации заданной высоты полета работает следующим образом.
Известно (Котик М.Г. Динамика взлета и посадки самолетов. М.: Машиностроение, 1984. 256 с. - ил., формула (2.18), с. 33), что при полете с постоянной скоростью должно выполняться условие:

где  ;
;
g - ускорение свободного падения;
 - тангенциальная перегрузка (в скоростной системе координат);
- тангенциальная перегрузка (в скоростной системе координат);
θ - угол наклона траектории полета.
Учитывая, что  (там же, формула (1.3), с. 10), условие (1) представляется в виде
(там же, формула (1.3), с. 10), условие (1) представляется в виде 
Из выражения (2) следует, что для того, чтобы текущая скорость самолета V оставалась неизменной (постоянной), необходимо выдерживать вертикальную скорость самолета, равную

при любых значениях тангенциальной перегрузки  , развиваемой двигателем после того, как РУД переведен в положение «максимал» в начале режима набора высоты.
, развиваемой двигателем после того, как РУД переведен в положение «максимал» в начале режима набора высоты.
Таким образом, для стабилизации скорости самолета при наборе высоты достаточно с помощью автоматической системы управления выдерживать заданную вертикальную скорость самолета, равную

Тангенциальная перегрузка  в формуле (4) исчисляется в скоростной системе координат и непосредственному измерению недоступна. Она определяется косвенно в третьем сумматоре 25 по сигналам датчиков продольной 10 и нормальной 11 перегрузок, установленных на самолете и измеряющих перегрузки в связанных осях координат. Так, при малых значениях угла атаки α и угла скольжения β справедливо следующее выражение:
в формуле (4) исчисляется в скоростной системе координат и непосредственному измерению недоступна. Она определяется косвенно в третьем сумматоре 25 по сигналам датчиков продольной 10 и нормальной 11 перегрузок, установленных на самолете и измеряющих перегрузки в связанных осях координат. Так, при малых значениях угла атаки α и угла скольжения β справедливо следующее выражение:

где nх и ny - соответственно продольная и нормальная перегрузки в связанной системе координат, измеряемые на борту самолета датчиками продольной 10 и нормальной 11 перегрузок (Остославский И.В., Стражева И.В. Динамика полета. Траектории летательных аппаратов. М.: Машиностроение, 1969, 499 с. - ил., таб. 2.2, с. 74).
Поскольку вычисление тангенциальной перегрузки  сопряжено с методической погрешностью (из-за допущения малых значений угла скольжения β), а также из-за инструментальных погрешностей измерения, свойственных самим датчикам 10, 11 соответственно продольной nх и нормальной nу перегрузок, расчетное значение Vy зад определяется во втором блоке перемножения сигналов 28 по формуле (4) также с погрешностью, что, в свою очередь, вызовет погрешность в стабилизации заданной вертикальной скорости самолета Vу зад.
сопряжено с методической погрешностью (из-за допущения малых значений угла скольжения β), а также из-за инструментальных погрешностей измерения, свойственных самим датчикам 10, 11 соответственно продольной nх и нормальной nу перегрузок, расчетное значение Vy зад определяется во втором блоке перемножения сигналов 28 по формуле (4) также с погрешностью, что, в свою очередь, вызовет погрешность в стабилизации заданной вертикальной скорости самолета Vу зад.
Для точного выдерживания заданной вертикальной скорости самолета в режиме набора высоты осуществляется коррекция текущей скорости самолета V при возникающих небольших ее отклонениях от заданного значения Vзад (например, при встречно-попутных ветровых возмущениях, из-за несоответствия скорости самолета V0 в момент включения режима набора высоты заданному значению самолета Vзад). Для этого вычисляется дополнительная составляющая заданной вертикальной скорости самолета ΔVу зад по формуле:

где ΔVу зад - сигнал на выходе второго сумматора 4;
ΔV - сигнал на выходе первого сумматора 3, очищенный от помех первым фильтром 27;
KV - масштабный коэффициент второго масштабного блока 6;
KiV - масштабный коэффициент первого масштабного блока 5;
 - передаточная функция интегратора 7;
- передаточная функция интегратора 7;
р - оператор дифференцирования.
Таким образом, в четвертом сумматоре 26 формируется суммарный сигнал заданной вертикальной скорости самолета  из сигналов (4) и (6) в виде:
из сигналов (4) и (6) в виде:

Первый фильтр 27 служит для ослабления действия помех, присутствующих в сигнале на выходе датчика текущей скорости самолета 2, второй фильтр 28 необходим для подавления помех в сигналах с датчика угла атаки 12, с датчиков нормальной 11 и продольной 10 перегрузок. В простейшем случае первый 27 и второй 28 фильтры имеют вид  , где Т - постоянная времени фильтров.
, где Т - постоянная времени фильтров.
В блоке ограничения сигналов по величине 21 суммарный сигнал заданной вертикальной скорости самолета  ограничивается в области положительных значений
ограничивается в области положительных значений

где Vy max=100-150 м/с (допустимое значение вертикальной скорости). Поскольку  , то исключается потеря высоты полета. Превышение вертикальной скорости самолета сверх разрешенного значения Vy max исключается за счет того, что
, то исключается потеря высоты полета. Превышение вертикальной скорости самолета сверх разрешенного значения Vy max исключается за счет того, что  .
.
С помощью блока логики 22 и коммутатора 23 осуществляется перевод автоматического управления самолетом из режима набора высоты в режим стабилизации заданной высоты полета. Признаком смены режимов служит сигнал Н*=Нзад-ΔH, где ΔH - заранее заданное упреждение по высоте (ΔH=100÷200М). В начале выполнения режима набора высоты, когда текущая высота полета Н<Н*, на вход блока формирования сигнала отработки заданной перегрузки 24 с помощью блока логики 22 и коммутатора 23 подается сигнал с выхода первого блока формирования сигнала заданной перегрузки 19. При превышении текущей высоты полета Н значения Н*, т.е. когда Н>Н*, включается автоматический режим стабилизации заданной высоты полета, а именно, на вход блока формирования сигнала отработки заданной перегрузки 24 с помощью блока логики 22 и коммутатора 23 будет подаваться сигнал с выхода второго блока формирования сигнала заданной перегрузки 20.
При малых отклонениях текущей скорости самолета от заданного значения, когда  м/с включается в работу интегратор 7. При
м/с включается в работу интегратор 7. При  м/с сигнал на входе интегратора 7 «обнуляется», а текущее значение сигнала на выходе интегратора «списывается» до нуля в течение трех секунд. Это позволяет обеспечить приемлемые динамические характеристики процессов стабилизации текущей скорости самолета с одновременным сохранением астатических свойств этих процессов, при которых скорость самолета точно соответствует заданному значению Vзад.
м/с сигнал на входе интегратора 7 «обнуляется», а текущее значение сигнала на выходе интегратора «списывается» до нуля в течение трех секунд. Это позволяет обеспечить приемлемые динамические характеристики процессов стабилизации текущей скорости самолета с одновременным сохранением астатических свойств этих процессов, при которых скорость самолета точно соответствует заданному значению Vзад.
Устройство обнаружения отказов в резервированной системе
Устройство восстановления работоспособности системы, резервированной с помощью мажоритарных элементов
Способ определения чувствительности опухоли легкого к терапии ингибиторами тирозинкиназ
Способ вертебропластики
Способ захода самолета на посадку в аварийных условиях (варианты)
Способ контроля дистанций между ведущим и ведомым самолетами при полете по маршруту с эшелонированием по высоте
Устройство обнаружения факта наведения самонаводящегося по радиоизлучению оружия на радиоэлектронное средство, защищенное отвлекающим устройством
Комплексная система управления траекторией летательного аппарата при заходе на посадку
Электромеханический мини-привод поступательного действия
Модульный молекулярный конъюгат для направленной доставки генетических конструкций и способ его получения
Способ определения чувствительности опухоли легкого к терапии ингибиторами тирозинкиназ
Способ вертебропластики
Устройство обнаружения факта наведения самонаводящегося по радиоизлучению оружия на радиоэлектронное средство, защищенное отвлекающим устройством
Комплексная система управления траекторией летательного аппарата при заходе на посадку
Электромеханический мини-привод поступательного действия
Модульный молекулярный конъюгат для направленной доставки генетических конструкций и способ его получения
Система автоматического управления самолетом при заходе на посадку
Молекулярные конъюгаты с поликатионным участком и лигандом для доставки в клетку и ядро клетки днк и рнк
Способ вертебропластики
Система объективного контроля

