Результат интеллектуальной деятельности: УСТРОЙСТВО ЗАХВАТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Вид РИД
Изобретение
Изобретение относится к области авиации, в частности к устройствам захвата беспилотных летательных аппаратов.
Известен способ захвата малогабаритных беспилотных летательных аппаратов (Патент РФ № 2565863), который содержит МБЛА с автоматической системой управления и элементами искусственного интеллекта, сети из высокопрочной полимерной нити и грузил, где на МБЛА установлены камеры кругового обзора, позволяющие с помощью бортового процессора определять в пассивном режиме пространственные координаты МБЛА противника в оптическом диапазоне электромагнитных волн, выбирая определенную дальность и скорость полета, в нижней части фюзеляжа МБЛА размещены подряд отсеки для размещения сетей с грузилами и устройств их отстрела, а также устройства с автоматическим креплением высокопрочной полимерной нити, соединяющей парашют, для спуска захваченного в сеть МБЛА противника, транспортировки с помощью собственной тяги МБЛА в запрограммированный район с наиболее благоприятным рельефом местности для успешной эвакуации захваченного МБЛА противника.
Однако этот способ не имеет возможности осуществлять захват БЛА противника на любой высоте траектории его полета без совершения дополнительных маневров при заходе на позицию захвата.
Известно устройство уничтожения дистанционно пилотируемых (беспилотных) летательных аппаратов (ДПЛА) (Патент РФ № 2495359 от 10.10.2013 г., бюл. № 28), которое содержит дистанционно пилотируемый летательный аппарат (ДПЛА), систему наведения с земли в виде радиолокатора, на летательном аппарате (ДПЛА) установлены видеокамеры обзора и датчик перемещения в хвостовой части летательного аппарата (ДПЛА) для заднего сектора, а также взаимосвязанный с датчиком перемещения контейнер, причем контейнер содержит крышку, автоматический замок для открытия контейнера, пружину, парашют и устройство для отделения парашюта.
Недостатком данного устройства является затрата большого количества времени для выхода на позицию захвата ДПЛА при осуществлении захвата ДПЛА противника.
Также известно устройство борьбы с дистанционно пилотируемыми (беспилотными) летательными аппаратами (Патент РФ № 72754 от 27.04.2008 г. ), содержащее блок доставки, блок пеленгации, блок наведения, контейнер с сетью-ловушкой, к краям которой крепятся грузы, где сеть-ловушка с грузилами, размещенная в контейнере, доставляется в район нахождения ДПЛА с помощью блока доставки (ракеты), наводится на ДПЛА с помощью блока наведения по данным блока пеленгации, полученными звукотепловым способом, после чего сеть-ловушка синхронно отстреливается с помощью четырех патронов в сторону цели, при этом грузила, представляющие круглые с отверстиями для крепления киперных лент, растягивают данную сеть-ловушку, обеспечивая накрытие и захват ДПЛА.
Недостатком данного устройства является низкая возможность обнаружения ДПЛА противника.
Техническим результатом, который достигается предлагаемым устройством, является:
- возможность осуществлять захват БЛА противника на любой высоте траектории его полета без совершения дополнительных маневров при заходе на позицию захвата;
- сокращение времени для выхода на позицию захвата БЛА при осуществлении захвата БЛА противника;
- повышение возможности обнаружения БЛА противника.
Указанный технический результат достигается тем, что устройство отстрела выполнено в виде пушки, управляемой бортовым процессором, в которой размещены минимум две капсулы с элементами захвата БЛА, такими как сеть и грузила, также на корпусе БЛА установлен механизм перемещения, отвечающий за перемещение пушки по траектории поперечного сечения поверхности фюзеляжа, а на механизме перемещения установлен механизм вращения, управляющий движением пушки в горизонтальной и вертикальной плоскостях вокруг оси.
Также указанный технический результат достигается тем, что на корпусе БЛА размещены датчики, работающие в акустическом диапазоне, и датчики, работающие в трех и более настраиваемых радиолокационных диапазонах электромагнитных волн, а также в грузила сети вмонтированы датчики определения координат.
Сущность данного изобретения заключается в том, что устройство захвата беспилотных летательных аппаратов, содержащее БЛА, бортовой процессор, сети с грузилами, камеры кругового обзора, позволяющие с помощью бортового процессора определять в пассивном режиме пространственные координаты БЛА противника в оптическом диапазоне электромагнитных волн, выбирая определенную дальность и скорость полета, устройство отстрела и парашют, где устройство отстрела, выполнено в виде пушки, управляемой бортовым процессором, в которой размещены минимум две капсулы с элементами захвата БЛА, такими как сеть, грузила и парашют, также на корпусе БЛА установлен механизм перемещения, отвечающий за перемещение пушки по траектории поперечного сечения поверхности фюзеляжа, а на механизме перемещения установлен механизм вращения, управляющий движением пушки в горизонтальной и вертикальной плоскостях вокруг оси.
Также сущность данного изобретения заключается в том, что устройство захвата беспилотных летательных аппаратов содержит на корпусе БЛА датчики, работающие в акустическом диапазоне, и датчики, работающие в трех и более настраиваемых радиолокационных диапазонах электромагнитных волн, а также в грузилах сети датчики определения координат.
Выполнение устройства отстрела в виде пушки, совместно с механизмом вращения и механизмом перемещения, которые расположены на фюзеляже БЛА, позволит осуществлять захват БЛА противника на любой высоте траектории его полета без совершения дополнительных маневров при заходе на позицию захвата, а также сократит временя для выхода на позицию захвата БЛА при осуществлении захвата БЛА противника.
Установленные на корпусе БЛА датчики, работающие в акустическом диапазоне, и датчики, работающих в трех и более настраиваемых радиолокационных диапазонах электромагнитных волн, связаны с бортовым процессором, позволят повысить возможность обнаружения БЛА противника.
Датчики определения координат, вмонтированные в грузила сетей, позволят повысить возможность обнаружения БЛА противника после совершения захвата.
Тем самым достигается указанный в изобретении технический результат.
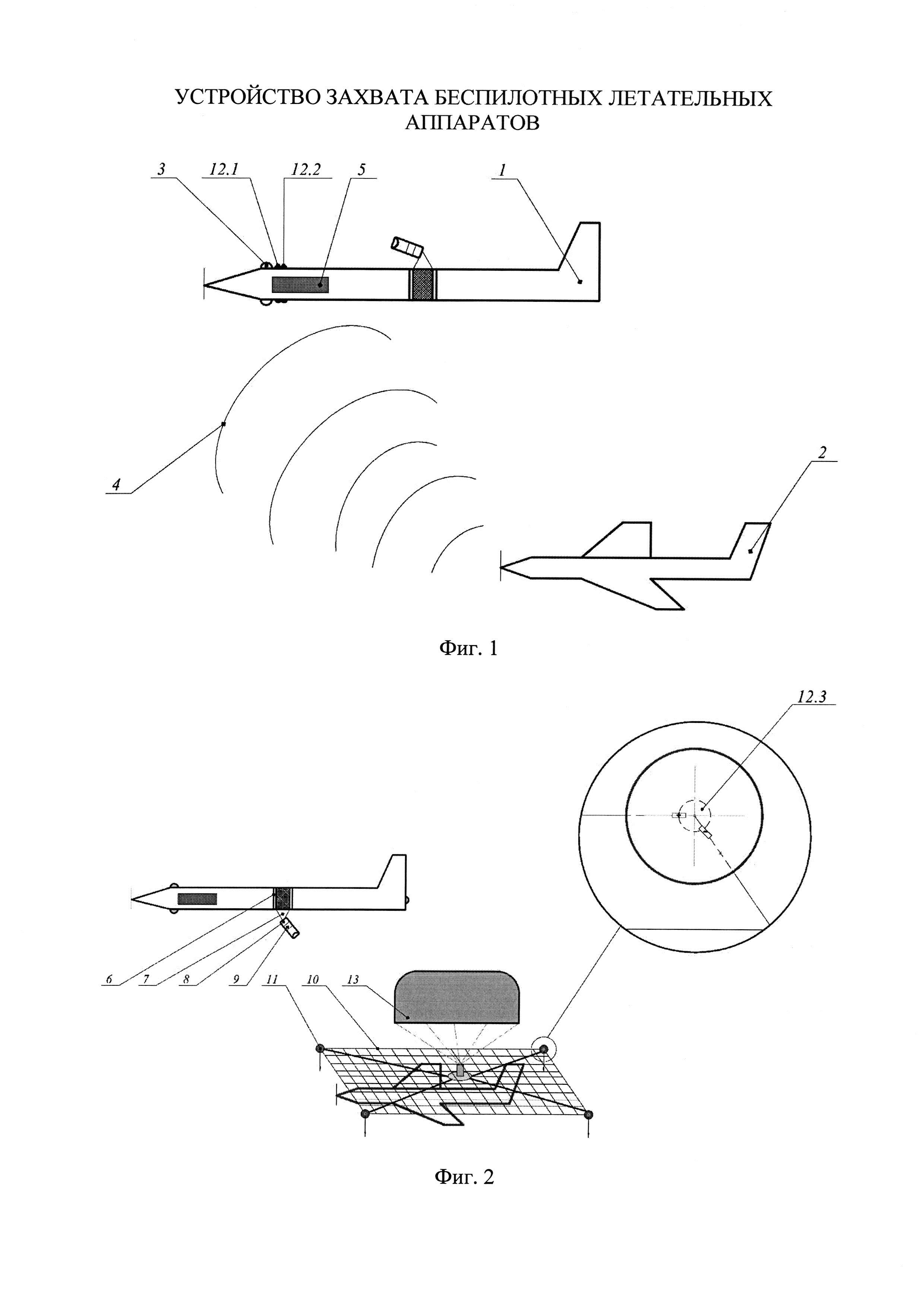
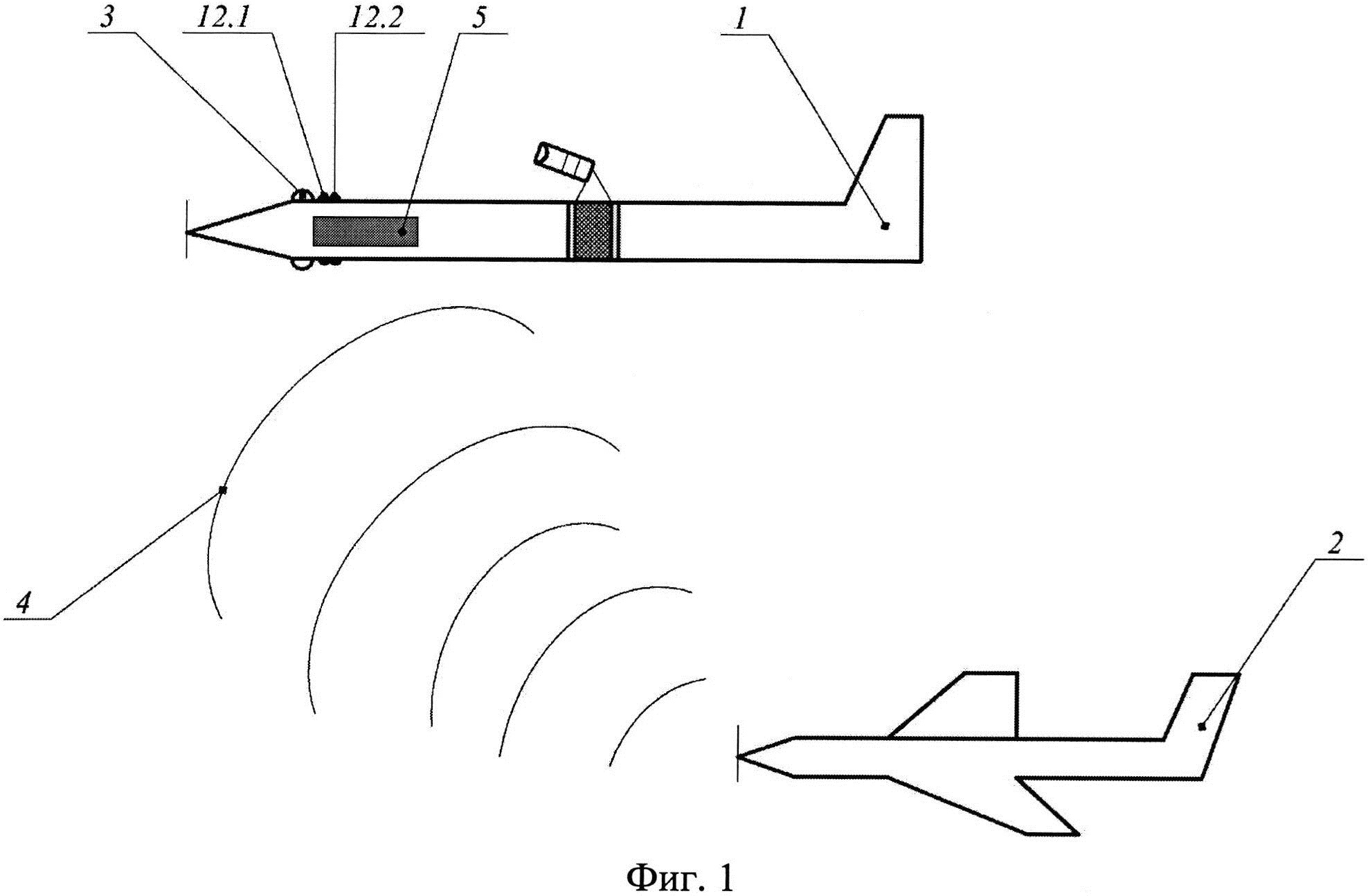
На фиг. 1 изображен момент определения пространственных координат БЛА противника. На фиг. 2 изображено устройство захвата беспилотных летательных аппаратов.
На фиг. 1-2 обозначены: 1 - беспилотный летательный аппарат (БЛА), 2 - беспилотный летательный аппарат (БЛА) противника, 3 - камеры кругового обзора, 4 - электромагнитные волны, 5 - бортовой процессор, 6 - механизм перемещения, 7 - механизм вращения, 8 - пушка, 9 - капсулы, 10 - сеть, 11 - грузила, 12.1, 12.2, 12.3 - датчики, 13 - парашют.
Назначение пушки 8 заключается в доставлении сети с грузилами до БЛА противника. Пушка может быть выполнена в виде [https://openworksengmeering.com/skywall. Дата обращения: 14.06.2017 г. ].
Механизм перемещения 6, установленный на фюзеляже БЛА 1, отвечает за перемещение механизма вращения 7 по траектории поперечного сечения поверхности фюзеляжа и обеспечивающий захват БЛА противника 2 по всем направлениям. Механизм перемещения может быть выполнен, например, в виде опорно-поворотного устройства [http://www.bearing-spb.ru/catalog/oporno-povorotnyie-ustrojstva/fag-ing/oporno-povorotnye-ustrojstva-vsu20/vsu 201094. Дата обращения: 13.06.2017 г. ].
Механизм вращения 7 управляет движением пушки 8 в горизонтальной и вертикальной плоскостях вокруг оси. Механизм вращения может быть выполнен в виде [http://nsat.ru/goods/povorotnoe-ustroistvo-nsat-rotator-45-az-el.html. Дата обращения: 14.06.2017 г. ].
Датчики 12.1 [http://www.staroruspribor.ru/catalog/echo-5/ Дата обращения: 13.06.2017 г. ], работающие в акустическом диапазоне, и датчики 12.2 (http://www.instokmw.ru/radiolonnie-datchiki/ Дата обращения: 13.06.2017 г. ], работающие в трех и более настраиваемых радиолокационных диапазонах электромагнитных волн, связаны с бортовым процессором 5 и предназначены для обнаружения и определения пространственных координат БЛА противника 2 в различных условиях.
Датчики 12.3 [http://motodom-d.ru/item.html?id=1334#tovar. Дата обращения: 14.06.2017 г. ] предназначены для определения пространственных координат БЛА противника 2 после совершения захвата.
Устройство захвата беспилотных летательных аппаратов работает следующим образом.
Для решения проблемы захвата БЛА противника 2 предлагается использовать БЛА 1, на котором установлены камеры кругового обзора 3, принимающие электромагнитные волны 4 в оптическом диапазоне, датчики 12.1, работающие в акустическом диапазоне, и датчики 12.2, работающие в трех и более настраиваемых радиолокационных диапазонах электромагнитных волн. Управление работой и обработкой полученной информации осуществляется бортовым процессором 5 с элементами искусственного интеллекта, который сам выбирает наиболее эффективные датчики для более точного обнаружения и определения пространственных координат БЛА противника 2 в различных условиях (фиг. 1). Учитывая дальность и скорость полета БЛА противника 2, бортовой процессор на основе искусственного интеллекта 5 подает сигнал на механизм перемещения 6, который по траектории поперечного сечения поверхности фюзеляжа перемещает механизм вращения 7 в направление к БЛА противника 2. Далее механизм вращения 7 устанавливает пушку 8 в заданном направлении (фиг. 2).
По команде захвата бортовой процессор 5 подает сигнал на пушку 8, которая производит выстрел капсулой 9. В момент прохождения заданного пути до БЛА противника 2 капсула 9 раскрывается и из неё вылетают элементы захвата, а именно сеть 10 с грузилами 11 и парашют (фиг. 2).
После осуществления захвата БЛА противника 2 и его приземления с помощью парашюта 13 датчик 12.3, встроенный в грузила 11, подает сигнал о месте приземления захваченного БЛА противника 2, после чего производится эвакуация захваченного БЛА 2 любыми известными техническими способами.
В случае промаха последовательность действий для осуществления захвата аналогична.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы промышленно выпускаемые элементы.
Способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата
Способ управления приемниками воздушного давления
Способ определения расстояния до неподвижного источника излучения движущимся пеленгатором
Способ формирования маршрута носителя пеленгатора
Устройство адаптивной маскировки объектов
Способ определения дальности до неподвижного источника излучения движущимся пеленгатором
Фазовый пеленгатор
Способ буксировки самолетов с использованием малогабаритного буксировщика с дистанционным управлением
Способ измерения задержки радиосигналов
Способ амплитудного двухмерного пеленгования
Домкрат винтовой телескопический
Шарнир равных угловых скоростей
Способ захвата беспилотных летательных аппаратов
Устройство для эвакуации самолетов

