Результат интеллектуальной деятельности: СПОСОБ ЗАХВАТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Вид РИД
Изобретение
Изобретение относится к военной технике, а также к области авиации, в частности к способам и методам захвата и поражения беспилотных летательных аппаратов.
Известны различные способы и технические решения для захвата МБЛА с использованием устройства сети-ловушки для борьбы с дистанционно пилотируемыми (беспилотными) летательными аппаратами (ДПЛА) (Патент №72753), устройство борьбы с дистанционно пилотируемыми (беспилотными) летательными аппаратами (Патент №72754).
Однако эти способы недостаточно эффективны, трудоемки и затрачивают большое количество времени при заходе на позицию для осуществления захвата БЛА противника.
Известен способ захвата малогабаритных беспилотных летательных аппаратов, основанный на определении пространственных координат противника с его последующим захватом и эвакуацией (Патент РФ №2565863). Данный способ реализуется в виде МБЛА с автоматической системой управления и элементами искусственного интеллекта, сети из высокопрочной полимерной нити и грузил, где на МБЛА установлены камеры кругового обзора, позволяющие с помощью бортового процессора определять в пассивном режиме пространственные координаты МБЛА противника в оптическом диапазоне электромагнитных волн, выбирая определенную дальность и скорость полета, в нижней части фюзеляжа МБЛА размещены подряд отсеки для размещения сетей с грузилами и устройств их отстрела, а также устройства с автоматическим креплением высокопрочной полимерной нити, соединяющей парашют, для спуска захваченного в сеть МБЛА противника, транспортировки с помощью собственной тяги МБЛА в запрограммированный район с наиболее благоприятным рельефом местности для успешной эвакуации захваченного МБЛА противника. Данный способ взят за прототип.
Однако этот способ не имеет возможности осуществлять захват БЛА противника на любой высоте траектории его полета без совершения дополнительных маневров при заходе на позицию захвата.
Техническим результатом предлагаемого способа захвата беспилотных летательных аппаратов является:
- возможность осуществлять захват БЛА противника на любой высоте траектории его полета без совершения дополнительных маневров при заходе на позицию захвата;
- сокращение времени для выхода на позицию захвата БЛА при осуществлении захвата БЛА противника.
Указанный технический результат достигается тем, что в известном способе захвата беспилотных летательных аппаратов устройство отстрела выполнено в виде пушки, перемещается по траектории поперечного сечения поверхности фюзеляжа и вращается в горизонтальной и вертикальной плоскостях вокруг своей оси.
Сущность изобретения заключается в том, что захват беспилотных летательных аппаратов основан на определении пространственных координат противника с его последующим захватом с помощью сетей с грузилами и устройства их отстрела, где устройство отстрела выполнено в виде пушки, перемещается по траектории поперечного сечения поверхности фюзеляжа и вращается в горизонтальной и вертикальной плоскостях вокруг своей оси.
Перемещение устройства отстрела по траектории поперечного сечения поверхности фюзеляжа может быть осуществлено, например, с помощью механизма перемещения, который обеспечит захват БЛА противника по всем направлениям.
Механизм перемещения может быть выполнен в виде [http://www.bearing-spb.ru/catalog/oporno-povorotnyie-us1rojstva/fag-inf/oporno-povorotnye-ustrojstva-vsu20/vsu201094. Дата обращения: 13.06.2017 г.].
Вращение устройства отстрела, например пушки, в горизонтальной и вертикальной плоскостях вокруг своей оси может быть осуществлено, например, с помощью механизма вращения.
Механизм вращения может быть выполнен в виде [http://nsat.ru/goods/povorotnoe-ustroistvo-nsat-rotator-45-az-el.html. Дата обращения: 14.06.2017 г.].
Устройство отстрела может быть выполнено, например, в виде пушки [https://openworksengineering.com/skywall. Дата обращения: 14.06.2017 г.].
Использование механизма перемещения, механизма вращения и устройства отстрела, выполненного в виде пушки, позволит значительно сократить время для осуществления захвата БЛА противника без дополнительных маневров при заходе на позицию для последующего захвата, а также даст возможность осуществлять захват БЛА противника на любой высоте траектории его полета. Данный технический результат повысит вероятность выполнения боевой задачи.
Этим достигается указанный в изобретении технический результат.
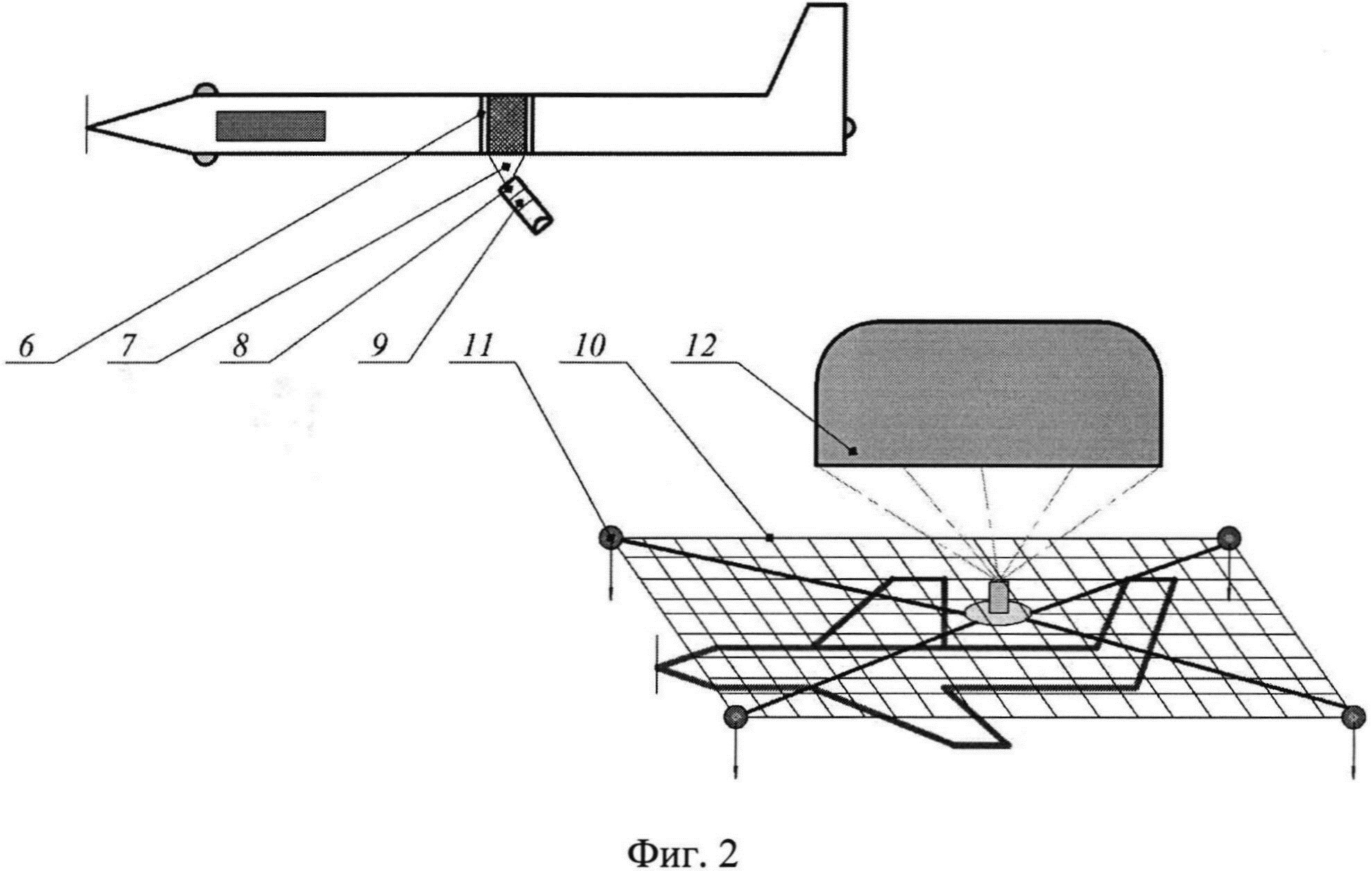
На фиг. 1-2 обозначены: 1 - беспилотный летательный аппарат (БЛА), 2 - беспилотный летательный аппарат (БЛА) противника, 3 - камеры кругового обзора, 4 - электромагнитные волны, 5 - бортовой процессор, 6 -механизм перемещения, 7 - механизм вращения, 8 - пушка, 9 - капсулы, 10 - сеть, 11 - грузила, 12 - парашют.
Предлагаемый способ может быть реализован с помощью устройства, схема которого показана на фиг. 1 и фиг. 2.
При попадании БЛА противника 2 в зону действия камер кругового обзора 3, которые принимают электромагнитные волны 4 в оптическом диапазоне, подается сигнал о обнаружении БЛА противника 2 на бортовой процессор 5. С помощью бортового процессора 5 определяются пространственные координаты БЛА противника 2. После определения координат БЛА противника 2 бортовой процессор 5, учитывая дальность и скорость полета БЛА противника 2, подает сигнал на механизм перемещения 6, который по траектории поперечного сечения поверхности фюзеляжа перемещает механизм вращения 7 и пушку 8 по направлению к БЛА противника 2. Затем механизм вращения 7 выводит пушку 8 под нужным углом на БЛА противника 2 для осуществления его захвата. Бортовой процессор 5 подает сигнал на пушку 8, которая в свою очередь производит выстрел капсулой 9. В момент прохождения заданного пути до БЛА противника 2 капсула 9 раскрывается и из нее вылетают сеть 10 с грузилами 11 и парашютом 12, которые осуществляют захват БЛА противника 2.
В случае промаха последовательность действий для осуществления захвата аналогична.
Предлагаемое техническое решение является новым и имеет изобретательский уровень, поскольку из общедоступных сведений неизвестен способ захвата беспилотных летательных аппаратов, при котором осуществление захвата БЛА противника БЛА не привязан к строго заданному месторасположению, а зависит лишь от мощности выстрела устройства отстрела, например пушки. Также БЛА не совершает лишних маневров для выхода на позицию захвата, что значительно сокращает время для совершения захвата БЛА противника и тем самым повышает вероятность выполнения поставленной задачи.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы промышленно выпускаемые элементы.
Способ захвата беспилотных летательных аппаратов, основанный на определении пространственных координат противника с его последующим захватом с помощью сетей с грузилами и устройства их отстрела, отличающийся тем, что устройство отстрела, выполненное в виде пушки, перемещается по траектории поперечного сечения поверхности фюзеляжа и вращается в горизонтальной и вертикальной плоскостях вокруг своей оси.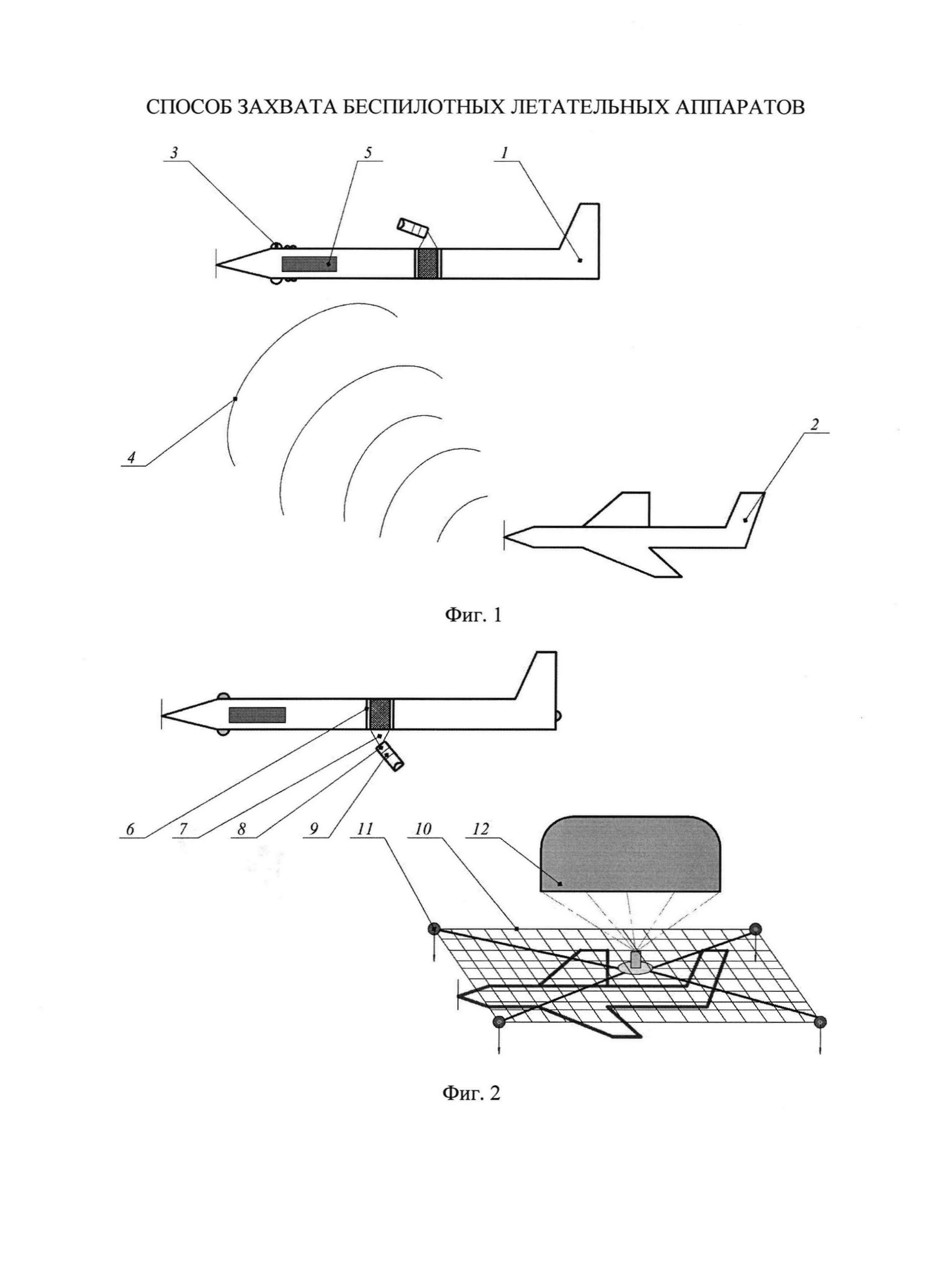
Способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата
Способ управления приемниками воздушного давления
Способ определения расстояния до неподвижного источника излучения движущимся пеленгатором
Способ формирования маршрута носителя пеленгатора
Устройство адаптивной маскировки объектов
Способ определения дальности до неподвижного источника излучения движущимся пеленгатором
Фазовый пеленгатор
Способ буксировки самолетов с использованием малогабаритного буксировщика с дистанционным управлением
Способ измерения задержки радиосигналов
Способ амплитудного двухмерного пеленгования
Домкрат винтовой телескопический
Шарнир равных угловых скоростей
Устройство захвата беспилотных летательных аппаратов
Устройство для эвакуации самолетов

