Результат интеллектуальной деятельности: Активный гидролокатор
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано для построения систем обнаружения эхосигнала от объектов при работе гидролокатора и, в частности, для повышения достоверности измерения дистанции.
Основным назначением гидролокаторов является дистанционное обнаружение объектов в водной среде и измерение дистанции, скорости и пространственного положения объектов. В зарубежной и отечественной литературе (Дж. Уоррен Хортон. «Основы гидролокации». Судпромгиз, 1961 г.; А.Н. Яковлев, Г.П. Каблов. «Гидролокаторы ближнего действия». Судостроение, 1983 г. и др.) рассмотрены структуры гидролокаторов, предназначенных для обнаружения объектов по отраженному эхосигналу, и основные блоки, обеспечивающие решение поставленных задач. Рассмотрение вопросов автоматического обнаружения и измерения параметров и их ошибок практически нигде не рассматривается.
Известен патент №2225991 на навигационную гидроакустическую станцию освещения ближней обстановки, содержащую антенную систему, генераторное устройство, тракт предварительной обработки, ЦВС-1, ЦВС-2, тракт измерения скорости звука, тракт прослушивания. В описании рассматриваются задачи измерения дистанции, скорости и пространственного положения обнаруженного объекта. Обнаружение объектов производится оператором и структуры измерителей дистанции, скорости не представлены.
Известна система активной гидролокации гидроакустической станции (ГАС) по патенту №2393503, содержащая излучающую и приемную акустические антенны, последовательно соединенные устройство формирования зондирующего сигнала, устройство формирования характеристик направленности в излучении, генераторное устройство, последовательно соединенные устройство формирования характеристик направленности системы гидролокации (ГЛ) в приеме и устройство обработки эхосигналов от цели, также содержащая устройство измерения дистанции до цели, устройство измерения радиальной составляющей скорости цели, последовательно соединенные устройство формирования характеристик направленности системы шумопеленгования (ШП), устройство обработки сигналов системы ШП, устройство измерения пеленга на цель системы ШП и блок определения величины изменения пеленга (ВИП), также содержащая последовательно соединенные блок определения общей тангенциальной составляющей скорости и блок определения тангенциальной составляющей скорости цели, также содержащая блок определения скорости цели, блок определения курса цели и блок связи ГАС с системами корабля.
Недостатком данной системы является то, что не измеряется скорость звука в районе работы, значение которого определяет саму оценку дистанции.
Известен активный гидролокатор по патенту №2346295, содержащий излучающую и приемную акустические антенны, генераторное устройство, устройство синхронизации, устройство формирования характеристик направленности, блок измерения T времени задержки эхосигнала от цели относительно момента излучения зондирующего сигнала, блок измерения угла прихода эхосигнала в вертикальной плоскости, блок вертикального разреза скорости звука и блок измерения глубины цели, вычислитель, определяющий прогнозные времена задержки эхосигнала ti относительно момента излучения зондирующего сигнала для набора возможных глубин цели Hi, и блок разности, определяющий  . Этот патент является наиболее близким аналогом, который может быть взят в качестве прототипа.
. Этот патент является наиболее близким аналогом, который может быть взят в качестве прототипа.
Недостатком рассматриваемого технического решения является то, что при распространении зондирующего сигнала и распространении эхосигнала на большие расстояния возникает ошибка определения текущей оценки дистанции, которая определяется совместным перемещением гидролокатора и объекта за время распространения зондирующего сигнала и эхосигнала.
После излучения зондирующего сигнала гидролокатор продолжает движение в выбранном направлении. Например, при скорости движения гидролокатора 6 узлов, что составляет 3 м/с и времени распространения до объекта и обратно 20 с, дистанция до объекта, измеренная на момент приема эхосигнала, уменьшится на 60 м. Аналогично происходит и при движении объекта после отражения эхосигнала. Объект продолжает двигаться в прежнем направлении и за время распространения эхосигнала от объекта до гидролокатора, равного примерно 10 с, и при скорости 3 м/с, пройдет расстояние, равное 30 м. Таким образом, измеренная дистанция будет отличаться от реальной дистанции на момент прихода эхосигнала на 90 м. Эта ошибка зависит от дистанции и скорости движения гидролокатора и скорости перемещения объекта и изменяется в зависимости от конкретной ситуации.
Задачей изобретения является повышение достоверности определения дистанции, измеренной движущимся гидролокатором, за минимальное время по нескольким циклам излучения-прием.
Техническим результатом от использования изобретения является повышение точности измерения дистанции путем устранения ошибки, связанной с совместным перемещением гидролокатора и объекта за время распространения сигнала и эхосигнала, и определение текущей дистанции с учетом перемещения гидролокатора и объекта.
Указанный технический результат достигается тем, что в активный гидролокатор, содержащий приемную антенну, передающую антенну, коммутатор приема-передачи, генератор, блок управления и отображения, блок приема и обработки эхосигнала с устройством формирования характеристик направленности (УФХН), блок измерения времени задержки, блок определения дистанции Д, блок определения радиальной скорости цели, блок определения скорости звука, введены новые признаки, а именно блок измерения собственной скорости Vсоб, блок определения курсового угла цели КУ, блок определения скорости сближения, блок определения ошибки дистанции за счет собственного движения Дсоб, блок определения ошибки дистанции за счет движения цели Дцели, блок определения текущей дистанции Дтек, причем приемная антенна последовательно соединена с первым входом коммутатора, с первым входом блока приема и обработки эхосигнала с УФХН, с блоком измерения времени задержки, с первым входом блока определения дистанции, с первым входом блока определения ошибки Дсоб, с первым входом блока определения Дтек, первым входом блока управления и отображения, с генератором со вторым входом коммутатора и с антенной излучения, блок измерения собственной скорости Vсоб последовательно соединен с первым входом блока определения скорости сближения, со вторым входом блока определения ошибки Дсоб, второй выход блока приема и обработки эхосигналов с УФХН соединен с блоком измерения КУ, выход которого соединен со вторым входом блока определения скорости сближения, блок определения скорости звука соединен со вторым входом блока определения дистанции Д, второй выход которого последовательно соединен с блоком определения радиальной скорости цели, блоком определения ошибки Дцели и вторым входом блока определения Дтек, второй выход блока определения радиальной скорости соединен со вторым входом блока управления и отображения двусторонней связью, а третий выход блока приема и обработки эхосигнала с УФХН соединен двусторонней связью с третьим входом блока управления и отображения.
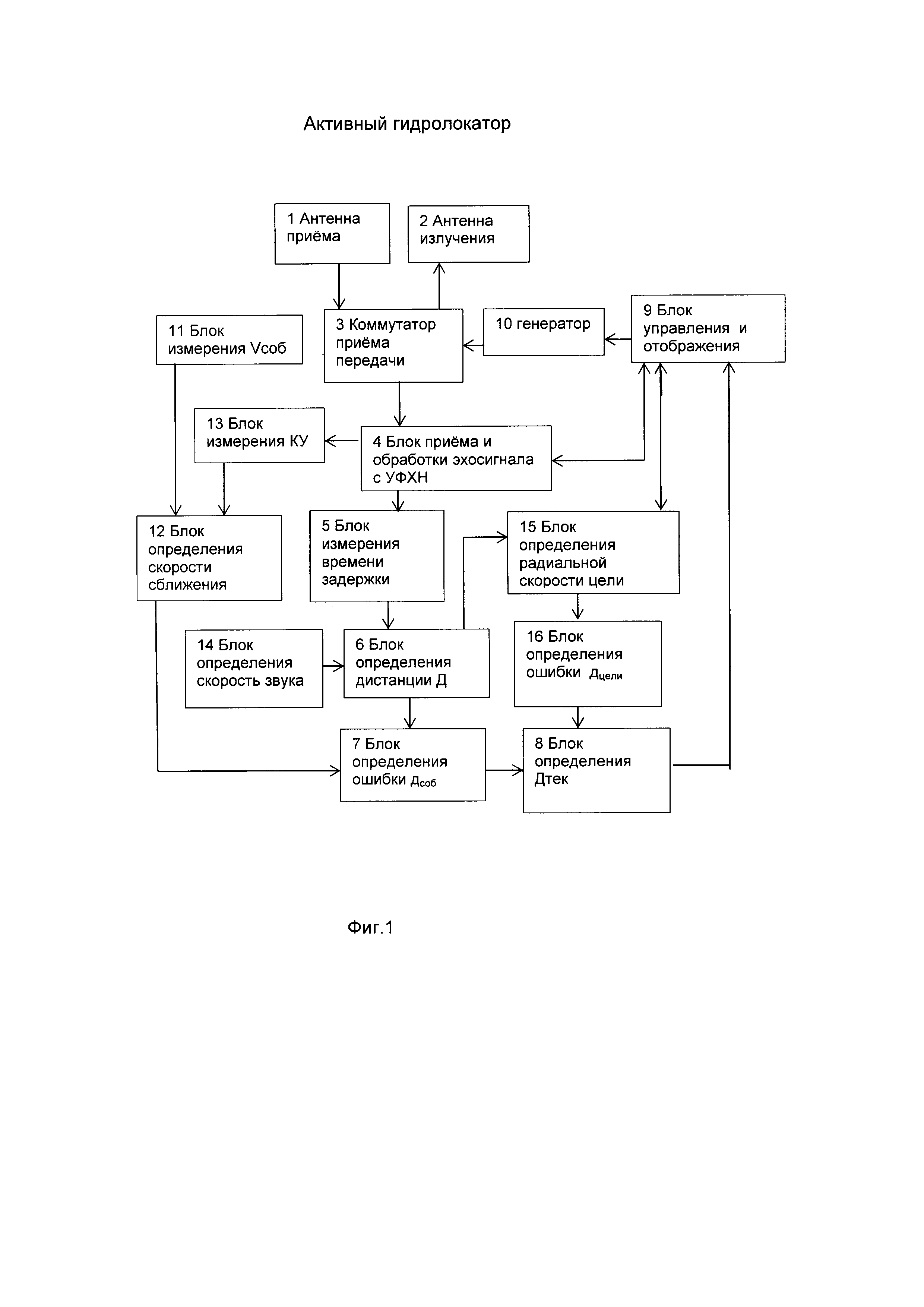
Сущность предлагаемого изобретения поясняется фиг. 1, на которой представлена структурная схема системы автоматической классификации гидролокатора ближнего действия.
1. Антенна приемная,
2. Антенна излучающая,
3. Коммутатор приема-передачи,
4. Блок приема и обработки эхосигнала с УФХН,
5. Блок измерения времени задержки,
6. Блок определения дистанции,
7. Блок определения ошибки за счет собственного движения Дсоб,
8. Блок определения дистанции с учетом собственного движения и движения цели Дтек,
9. Блок управления и отображения,
10. Генератор,
11. Блок измерения собственной скорости Vсоб,
12. Блок определения скорости сближения с учетом КУ цели относительно Vсоб,
13. Блок измерения курсового угла обнаруженной цели КУ,
14. Блок определения скорости звука,
15. Блок определения радиальной скорости цели Vцели,
16. Блока определения ошибки оценки дистанции до цели Дцели.
Приемная антенна 1, коммутатор приема-передачи 3, блок 4, блок 5, блок 6, блок 7, блока 8, блок 9 соединены последовательно. Выход генератора 10 соединен со вторым входом коммутатора 3 приема-передачи, выход которого соединен с излучающей антенной 2. Второй вход блока 6 соединен с выходом блока 14, а выход блока 6 - с первым входом блока 15. Выход блока 15 соединен с последовательно соединенными блоками 16 и 8. Блок 15 двусторонней связью соединен с блоком 9, третий вход которого соединен с вторым выходом блока 4. Первый и второй входы блока 12 соединены с выходом блока 11 и выходом блока 13 соответственно, а выход блока 12 соединен с вторым входом блока 7.
Блоки 1-5, 10, 13 являются известными устройствами, которые используются в прототипе и достаточно подробно изложены в литературе по гидроакустике (А.С. Колчеданцев. «Гидроакустические станции». Л., Судостроение, 1982 г.; «Справочник по гидроакустике». Л., Судостроение, 1988 г.).
Блок 11 определения скорости движения является известным устройством, которое используется на всех современных судах для измерения собственной скорости (А.В. Богородский, Д.Б. Островский. «Гидроакустические навигационные и поисково-обследовательские средства». Санкт-Петербург, Изд. ЛЭТИ, 2009 г., стр. 48).
Блок 14 определения скорости звука является известным устройство, которое выпускается серийно (В.А. Комляков. «Корабельные средства измерения скорости звука и моделирования акустических полей в океане». СПб., «Наука», 2003 г., стр. 50-87).
Блоки 7, 8, 12, 15, 16 могут быть реализованы с использованием цифровой обработки на основе пакетов расширения «Матлаб», которые обеспечивают последовательную процедуру вычисления заданных алгоритмов, рассмотрены в пособии: А.Б. Сергиенко. «Цифровая обработка сигналов». Санкт-Петербург, 2011 г., стр. 655.
В настоящее время все обработки гидроакустических сигналов, включая формирование характеристик направленности, базовые алгоритмы обработки эхосигналов на основе спектрального и корреляционного анализа при работе в реальном времени с использованием аппаратных решений и жесткой логики вычислений, выполняются на спецпроцессорах (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. Корабельная гидроакустическая техника. С.-П., Наука, 2004 г., стр. 278-297). Аналогичная реализация выполнена в одном из приведенных аналогов на ЦВС-1 и ЦВС-2 по патенту №2225991.
Вопросы, связанные с цифровой обработкой сигналов, а также использование пакетов расширения «Матлаб», которые обеспечивают последовательную процедуру обработки использованных алгоритмов, рассмотрены в пособии: А.Б. Сергиенко. «Цифровая обработка сигналов». Санкт-Петербург, 2011 г., стр. 655.
Цифровые процессоры являются известными устройствами, которые предназначены для осуществления конкретных алгоритмов обработки с использованием аппаратных решений и жесткой логики вычислений. Их применение повышает быстродействие цифровых вычислительных систем в несколько раз и в большинстве случаев сокращает аппаратные затраты. Описания спецпроцессоров приведены в книге: Корякин Ю.А. Смирнов С.А. Яковлев Г.В. «Корабельная гидроакустическая техника». Санкт-Петербург, Изд. Наука, 2004 г., стр. 281. Там же приведено описание гидроакустических комплексов, построенных на основе спецпроцессоров (стр. 296., стр. 328). С использованием этих же процессоров могут быть реализованы вновь введенные блоки предлагаемого изобретения.
Работа активного гидролокатора производится следующим образом.
Из блока 9 управления и отображения сигналы управления поступают на генератор 10, который формирует зондирующий сигнал, и через коммутатор 3 антенна 2 излучает его в водную среду. Отраженные от цели эхосигналы принимаются антенной 1 и через коммутатор 3 передаются в блок 4. В блоке 4 производится формирование характеристик направленности в приеме и обработка принятых эхосигналов стандартными известными процедурами с выбором порогов обнаружения, выбором максимумов и характеристик направленности, в которых обнаружены эхосигналы. Это известные процедуры, которые реализуются во всех гидролокаторах и в прототипе. Вся информация о помехах и сигналах поступает на блок 9 отображения и представляется оператору на индикаторе. Это связь является двусторонней, по которой в блок 4 передается время излучения из блока 9 и время между излучениями. Это же время излучения используется в блоке 5 для измерения времени задержки между излученным сигналом и принятым эхосигналом, который превысил порог. По величине задержки определяется дистанция до цели в блоке 6, для чего из блока 14 определения скорости звука поступает оценка скорости звука. Эти стандартные процедуры реализованы в прототипе. Измеренная оценка дистанции с измеренными временами задержки передаются в блок 7 определения ошибки. На второй вход блока 7 из блока 12 поступает оценка скорости сближения. Пространственное положение цели может не совпадать с направлением движения, поэтому составляющая скорости движения будет зависеть от курсового угла цели, который определяется в блоке 4 по номеру характеристики направленности, в которой произошло обнаружение эхосигнала от цели. В блоке 7 производится определение ошибки оценки дистанции, которое связано с сокращением дистанции при движении гидролокатора за время распространения зондирующего сигнала и отраженного эхосигнала. В блоке 8 производится уменьшение измеренной дистанции Д на величину произведения скорости сближения и времени распространения. Эта оценка дистанции передается в блок 9 для отображения. Второй выход блока 6 соединен с блоком 15 определения радиальной скорости цели, которое производится по двум посылкам. После излучения второго зондирующего сигнала время между излучениями поступает из блока 9 в блок 15. Дистанция, измеренная по последующим посылкам, передается в блок 15, где производится определение радиальной скорости. Цель может приближаться и удаляться, что влечет за собой изменение знака и, соответственно, увеличение или уменьшение дистанции за время между посылками, что производится в блоке 16 определения ошибки Дцели, которые вызваны перемещением цели за время распространения эхосигнала от цели до гидролокатора. Дистанция, полученная по первой посылке, учитывает только собственное движение гидролокатора, а дистанция, полученная по второй посылке, учитывает не только собственное перемещение, но и изменение дистанции за счет движения цели. Излучение зондирующих сигналов производится, как правило, через фиксированный интервал времени, который определяется выбранной шкалой работы, характерной для данного гидролокатора. По каждому излученному сигналу происходит обнаружение цели и измерение дистанции до нее. Корректировка дистанции за счет движения гидролокатора производится по каждой посылке. Корректировка дистанции за счет перемещения цели возможна только после измерения радиальной скорости цели, которая производится по изменению дистанций, измеренных по двум последовательным посылкам. Эти дистанции последовательно поступают в блок 15 измерения радиальной скорости.
Таким образом, формируется оценка дистанции, которая учитывает влияние собственного движения на оценку дистанции и влияние скорости цели на оценку дистанции, что и представляется одновременно с оценкой радиальной скорости цели и оценкой курсового угла цели.
Активный гидролокатор, содержащий приемную антенну, передающую антенну, коммутатор приема-передачи, генератор, блок управления и отображения, блок приема и обработки эхосигнала с устройством формирования характеристик направленности (УФХН), блок измерения времени задержки, блок определения дистанции Д, блок определения радиальной скорости цели, блок определения скорости звука, отличающийся тем, что введены блок измерения собственной скорости V, блок определения курсового угла цели КУ, блок определения скорости сближения, блок определения ошибки дистанции за счет собственного движения Д, блок определения ошибки дистанции за счет движения цели Д и блок определения текущей дистанции Д, причем приемная антенна последовательно соединена с первым входом коммутатора, с первым входом блока приема и обработки эхосигнала с УФХН, с блоком измерения времени задержки, с первым входом блока определения дистанции, с первым входом блока определения ошибки Д, с первым входом блока определения Д, первым входом блока управления и отображения, с генератором со вторым входом коммутатора и с антенной излучения, блок измерения собственной скорости V последовательно соединен с первым входом блока определения скорости сближения, со вторым входом блока определения ошибки Д, второй выход блока приема и обработки эхосигналов с УФХН соединен с блоком измерения КУ, выход которого соединен со вторым входом блока определения скорости сближения, блок определения скорости звука соединен со вторым входом блока определения дистанции Д, второй выход которого последовательно соединен с блоком определения радиальной скорости цели, блоком определения ошибки Д и вторым входом блока определения Д, второй выход блока определения радиальной скорости соединен со вторым входом блока управления и отображения двусторонней связью, а третий выход блока приема и обработки эхосигнала с УФХН соединен двусторонней связью с третьим входом блока управления и отображения.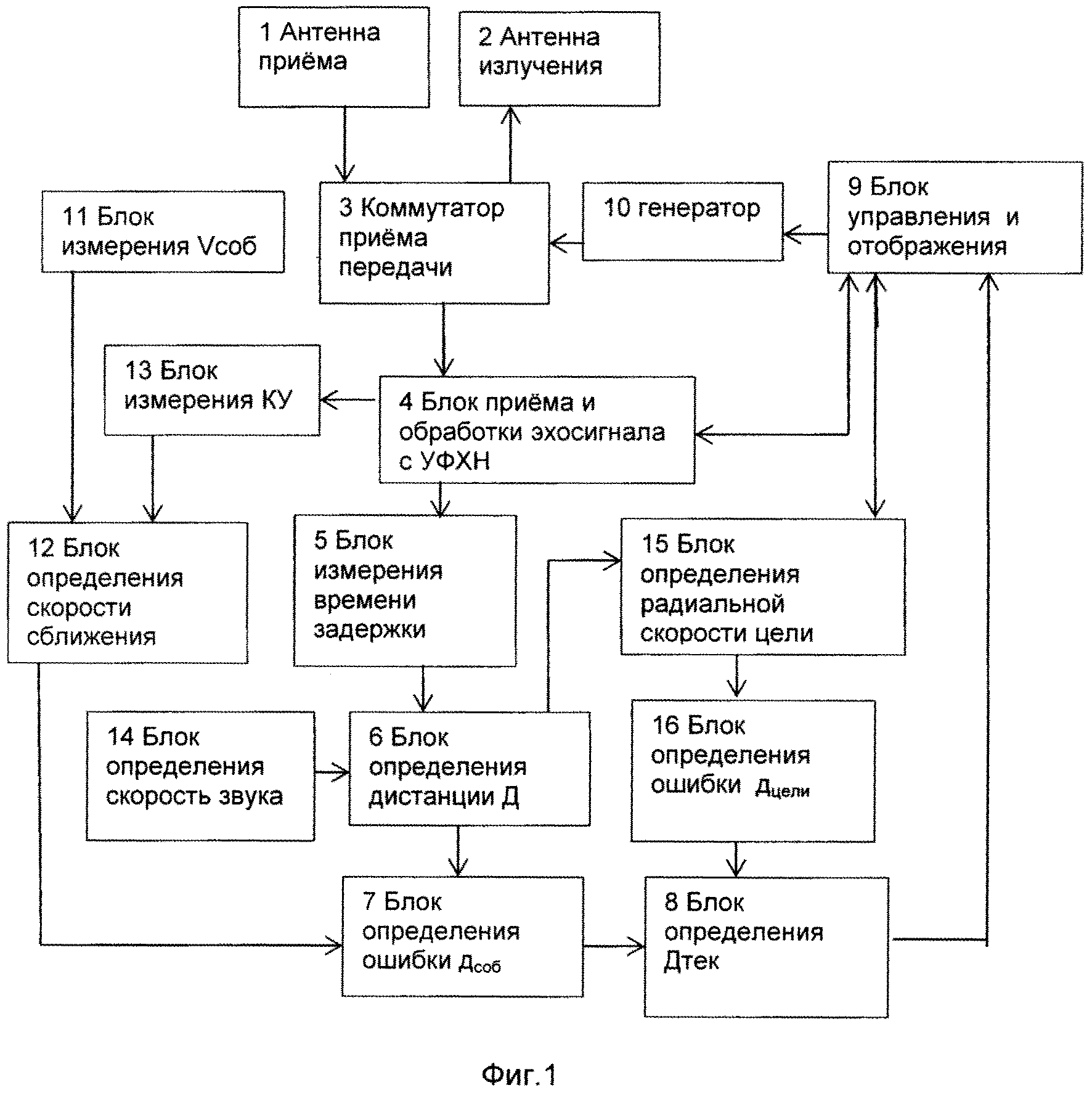
Устройство получения информации о шумящем в море объекте
Способ обработки гидролокационной информации
Система и способ измерения акустических характеристик антенн с помощью подводного аппарата
Способ измерения скорости движения цели гидролокатором
Способ определения координат движущихся источников излучения пассивным гидролокатором
Способ обработки гидролокационной информации
Способ определения глубины погружения объекта
Способ классификации эхо-сигнала гидролокатора
Система шумопеленгования гидроакустического комплекса подводной лодки
Система противоторпедной защиты гидроакустического комплекса подводной лодки
Гидроакустический способ определения пространственных характеристик объекта на дне
Гидроакустический способ обработки рыбопромысловой информации
Гидролокационный способ обнаружения подводных объектов в контролируемой акватории
Способ измерения радиальной скорости объекта по его шумоизлучению
Гидроакустический способ измерения глубины погружения неподвижного объекта
Способ определения глубины погружения нижней точки айсберга
Способ автоматического обнаружения и классификации объекта в водной среде
Способ автоматического определения гидролокатором курсового угла обнаруженного объекта
Способ определения дистанции гидролокатором
Способ автоматического определения параметров айсберга гидролокационным методом

