Результат интеллектуальной деятельности: Способ определения координат движущихся источников излучения пассивным гидролокатором
Вид РИД
Изобретение
Предлагаемое изобретение относится к области гидроакустики и может быть использовано в пассивной гидролокации, а также в плосковолновой гидроакустике, атмосферной акустике и пассивной радиолокации.
При пассивной локации одного или нескольких источников используют протяженные (широкоапертурные) системы приемников или антенн (приемные системы (ПС) и двухкоординатные индикаторы с дискретной координатной сеткой и статическим накоплением сигнала. При наличии нескольких источников в поле наблюдения возникает сложность выбора и затем слежения за положением на индикаторе их глобальных максимумов с точностью, достаточной для решения задач оператора, таких как наведение динамических устройств слежения, задач классификации и др. Для устранения этих недостатков необходимо более точное определение координат, чем интервалы дискретности координатной сетки и автоматическое слежение за ними от интервала к интервалу статического накопления за время Т.
Известны способы определения многомерных, в том числе двухмерных параметров сигналов [1]. Они основаны на использовании предварительно известных приближенных «опорных» значений искомых координат и определении к ним поправок путем когерентной обработки текущих измерений сигналов на приемниках антенны. Элементами этой обработки являются дискриминаторы [2], реагирующие на знак отклонения «опорного» значения координаты от оценки, полученной по текущей выборке. По точке перемены знака определяют величину отклонения и, используя его как поправку к «опорному» значению, определяют новое значение оценки координаты. Использование обратной связи в виде назначения новой оценки в качестве «опорной» позволяет реализовать измерение координат в следящем режиме.
Первым недостатком этого и других способов этого класса является то, что они сформулированы для плосковолнового поля и определения одной координаты - направления. Другим недостатком является то, что для наведения следящего устройства необходимо иметь предварительные значения искомых координат с достаточной точностью в пределах линейного участка выходной характеристики дискриминатора.
Третьим недостатком является то, что поправки к опорным значениям получают путем технически сложной фазовой, когерентной обработки текущих измерений сигналов на антенне, требующей значительных аппаратных и вычислительных ресурсов, и при наличии нескольких сигналов в поле наблюдения следить за их глобальными и локальными (боковыми) максимумами технически невозможно.
Известны способы нахождения промежуточных значений последовательности дискретных измерений, в частности «параболическая интерполяция» или «интерполяционная формула Лагранжа» [3]. При этом методе для определения промежуточных значений двух параметров двумерной дискретной последовательности измерений z(x, y) сначала интерполируют последовательность z(x, yk) при фиксированном yk, а затем по y относительно x.
Недостатками этого способа является то, что решение представлено в общем виде, для одноразмерных параметров и не предполагает решения конкретной задачи определения координат максимума двумерной последовательности измерений с разными размерностями и параметрами последовательностей. Также не предусматривается слежение за изменением параметров во времени.
Известны способы определения местоположения максимума дискретной последовательности измерений z(θi), при i=1, 2, …, N на шкале аргумента θ путем приближения ее многочленами Z(θ)=a0ϕ0(θ)+a1ϕ1(θ)+…anϕn по методу наименьших квадратов [3 с. 684], вычисления производной найденного приближения и нахождения ее нулевого значения на шкале аргумента θ. При двухмерной последовательности поступают так же, как в предыдущем аналоге: сначала находят приближение последовательности z(x, yk) при фиксированном yk, а затем по y относительно x. Недостатками этого аналога являются теми же, что у предыдущего аналога.
По количеству общих признаков наиболее близким к предлагаемому изобретению является способ пассивного определения координат источников излучения по патенту [4], содержащий прием сигнала широкоапертурной приемной системой (ПС) из М≥3 приемников в зоне Френеля источника, (M2-М)/2-канальную пространственно-временную обработку с P×Q выходными каналами и визуальное отображение отклика ПС на экране индикатора в виде сигнальной отметки (СО). Этот способ обеспечивает визуальное наблюдение источников излучения в виде их СО на двухкоординатном поле индикатора «направление/дальность», с прямым определением координат по положению максимума СО на его шкалах.
Для этого в поле индикации организуют координатную сетку (КС) «направление-дальность»: αр, Dq (р=1, …P, q=1, …Q) с требуемыми границами поля наблюдения «αmin≤αр≤αmax; Dmin≤Dq≤Dmax» и с интервалами дискретности δα и δD. Каждому pq-му узлу КС соответствует канал пространственно-временной обработки (ПВО), выходное значение которого zpq поступает в pq-ю ячейку индикаторного массива размером P×Q, выводимого на КС индикатора.
В каналах ПВО измеряют попарные взаимнокорреляционные функции (ПВКФ) сигнала Cmn(τ) каждой m-й антенны с сигналом каждой другой n-й антенны, считывают значения Cmn(τ), в точках τ=τmn(pq), рассчитанных заранее, распределяют их по pq-м ячейкам узлов координатной сетки и суммируют с компенсацией попарных разностей времен распространения сигнала из точки поля наблюдения с координатами pq-го узла КС (αр, Dq) с накоплением за время Т, после чего полученные суммарные значения для всех pq-x узлов выводят на координатную сетку индикатора, а координаты источников излучения определяют по положению максимумов их СО на координатных шкалах сетки. Цикл обновления информации в узлах КС равен Т.
Недостатком этого способа является дискретность представления отклика ПС на КС индикатора, которая может приводить к ошибкам при нахождении максимума отклика между узлами координатной сетки, особенно при изменении значений координат от цикла к циклу обновления информации (при движущемся источнике и/или носителе приемной системы).
Другим недостатком является необходимость оператору вручную следить за максимумом каждой СО, что при нескольких источниках, перемещающихся в поле наблюдения и имеющих дополнительные (боковые) максимумы СО, снижает эффективность работы оператора.
Кроме того, форма отклика ПС в способе-прототипе имеет особенную форму на двухкоординатном поле: сечение его главного максимума по направлению приблизительно симметрично, а сечение по дальности существенно асимметрично, причем эта асимметрия при малых дальностях невелика, а на больших дальностях увеличивается с одновременным увеличением ширины СО, что также снижает эффективность работы оператора.
Задачей изобретения является увеличение точности определения координат движущихся источников излучения широкоапертурной ПС по СО на индикаторе и увеличение эффективности работы оператора при наличии нескольких движущихся источников.
Техническим результатом предлагаемого изобретения является определение координат движущихся источников с большей точностью, чем интервалы дискретности КС и обеспечение автоматического слежения за ними от цикла к циклу накопления.
Для обеспечения указанного технического результата в способ пассивного определения координат источников излучения, содержащий широкоапертурную приемную систему (ПС) из М приемников с P×Q каналами пространственно-временной обработки (ПВО) с временем накопления Т и дискретной координатной сеткой (КС) в координатах направление/дальность [направление αр (строки), дальность Dq (столбцы)] с заданными интервалами дискретности δα и δD соответственно, при этом в узлах КС отображают выходные значения каналов ПВО [zpq], которые образуют отклик ПС на сигнал источника в виде сигнальной отметки (СО) и последовательно по циклам накопления Т подаются на индикатор,
введены новые признаки, а именно: используют временнýю последовательность выходных значений каналов ПВО [zpqi], отображаемых на индикаторе (i=0, 1, 2, …) с интервалом T, организуют визир и координатные шкалы (КШ) с непрерывными значениями α и D. На первом цикле (i=0) наводят визир на видимый на индикаторе максимум СО, фиксируют его положение на КШ, определяя этим точку наведения αн0, Dн0. Переходят в режим автоматического слежения, включающий выделение фрагмента КСi=0 из Kα строк и KD столбцов, ближайших к αн0, Dн0 соответственно, с номерами kα=1, …, Kα и kD=1, …, KD (считая столбцы от левой границы, а строки - от нижней границы фрагмента KCi=0) соответственно. Уточняют положение максимума СО по направлению αн0, получая новое значение  . Затем, используя
. Затем, используя  , уточняют положение максимума СО по дальности, получая новое значение
, уточняют положение максимума СО по дальности, получая новое значение  . На этом цикл слежения заканчивается. После этого переходят к следующему по циклам накопления Т отображению [zpq1], автоматически назначая новую точку наведения αн1=α0* и Dн1=D0*, и повторяют действия режима слежения последовательно по мере поступления очередных [zpqi], каждый раз используют полученные на предыдущем цикле новые значения в качестве точки наведения на следующем i-м цикле слежения:
. На этом цикл слежения заканчивается. После этого переходят к следующему по циклам накопления Т отображению [zpq1], автоматически назначая новую точку наведения αн1=α0* и Dн1=D0*, и повторяют действия режима слежения последовательно по мере поступления очередных [zpqi], каждый раз используют полученные на предыдущем цикле новые значения в качестве точки наведения на следующем i-м цикле слежения:  ,
,  .
.
Для получения нового значения  на i-м цикле слежения определяют фрагмент новой строки КСi по α с Kα узлами при дальности D=Dнi. Для этого в каждом kα-м узле (kα=1, …, Kα) фрагмента КСi считывают KD значений
на i-м цикле слежения определяют фрагмент новой строки КСi по α с Kα узлами при дальности D=Dнi. Для этого в каждом kα-м узле (kα=1, …, Kα) фрагмента КСi считывают KD значений  kα-го столбца, kD=1, …, KD, находят в каждом столбце значение, соответствующее D=Dнi, с использованием интерполяции и присваивают это значение kα-му узлу искомой новой строки. В результате цикла по kα получают последовательность из Kα значений Zα(kα, D=Dнi), являющуюся искомым фрагментом новой строки по α. Находят максимум значений этого фрагмента строки Zαmax(α, D=Dнi) с использованием интерполяции и его положение на шкале направлений КШ принимают за новое значение направления
kα-го столбца, kD=1, …, KD, находят в каждом столбце значение, соответствующее D=Dнi, с использованием интерполяции и присваивают это значение kα-му узлу искомой новой строки. В результате цикла по kα получают последовательность из Kα значений Zα(kα, D=Dнi), являющуюся искомым фрагментом новой строки по α. Находят максимум значений этого фрагмента строки Zαmax(α, D=Dнi) с использованием интерполяции и его положение на шкале направлений КШ принимают за новое значение направления  .
.
Аналогичным образом для получения нового значения  определяют фрагмент нового столбца по D с KD узлами при направлении
определяют фрагмент нового столбца по D с KD узлами при направлении  , для чего в каждом kD-м узле (kD=1, …KD) фрагмента КСi считывают Kα значений
, для чего в каждом kD-м узле (kD=1, …KD) фрагмента КСi считывают Kα значений  kD-й строки с kα=1, …, Kα, находят в каждой строке значение соответствующее
kD-й строки с kα=1, …, Kα, находят в каждой строке значение соответствующее  с использованием интерполяции и присваивают это значение kD-му узлу искомого нового столбца. В результате цикла по kD получают последовательность из KD значений
с использованием интерполяции и присваивают это значение kD-му узлу искомого нового столбца. В результате цикла по kD получают последовательность из KD значений  , являющуюся искомым фрагментом нового столбца по D. Находят максимум значений этого фрагмента столбца
, являющуюся искомым фрагментом нового столбца по D. Находят максимум значений этого фрагмента столбца  с использованием интерполяции, а положение его на шкале дальностей КШ принимают за новое значение дальности
с использованием интерполяции, а положение его на шкале дальностей КШ принимают за новое значение дальности  .
.
Использование интерполяции заключается в том, что для нахождения значений последовательностей  , Zα(kα, D=Dнi,
, Zα(kα, D=Dнi,  ,
,  на непрерывной шкале их преобразуют в зависимости от непрерывного аргумента:
на непрерывной шкале их преобразуют в зависимости от непрерывного аргумента:  ,
,  ,
,  , и
, и  соответственно с использованием интерполяции методом приближения дискретной последовательности многочленом [3, с. 676] и вычисляют значения соответствующих кривых от непрерывного аргумента, не связанного с дискретной КС, а для определения положения их максимумов на непрерывных шкалах используют производные этих зависимостей по D и по α соответственно и находят положения максимумов по точке пересечения производными шкал D и α соответственно.
соответственно с использованием интерполяции методом приближения дискретной последовательности многочленом [3, с. 676] и вычисляют значения соответствующих кривых от непрерывного аргумента, не связанного с дискретной КС, а для определения положения их максимумов на непрерывных шкалах используют производные этих зависимостей по D и по α соответственно и находят положения максимумов по точке пересечения производными шкал D и α соответственно.
Технический результат обеспечивается тем, что слежение за максимумом СО во временной последовательности отображений циклически с интервалом Т поступающих с выходов ПВО [zpqi] выполняется в непрерывных, а не в дискретных шкалах координат, при этом на каждом цикле их значения, принятые за начальные αнi, Dнi уточняют по Kα×KD измерениям в узлах КС в окрестностях вершины СО. Kα и KD выбираются разработчиком пассивного гидролокатора исходя из известной ширины вершины СО в сечениях по α и по D и интервалов дискретности δα и δВ, выбранных по известным разработчику параметрам ПС. Обычно для Kα и KD достаточно 5÷8 значений.
Для уточнения координат используют фрагмент КС из строк и столбцов, ближайших к точке наведения, в котором определяют фрагмент новой строки по kα с Kα узлами при фиксированной дальности D=Dнi и фрагмент нового столбца по kD, которые в общем случае могут находиться между строками и столбцами дискретной КС. Значения в узлах новой строки определяют, используя в каждом kα-м узле последовательность значений [zpqi] в узлах соответствующего ему столбца по D, при p=kα, q=kD, kD=1, … KD. Имея в виду, что все сечения СО в пределах вершины и выбранного фрагмента КС как по направлению, так и по дальности являются гладкими унимодальными кривыми (на основании физики процессов и методов ПВО в [4]):  (α, при D=D(kD)) и
(α, при D=D(kD)) и  (D, при α=α(kα)), kα=1, …, Кα, kD=1, …KD, которые представлены последовательностями измерений в узлах КС, их удобно преобразовать в зависимости от непрерывного аргумента, используя последовательности измерений [zpqi] и интервалы дискретности δα и δD соответственно. Тогда значение в kα-м узле новой строки zα(kα) определяют как значение зависимости при D=Dнi, а эту зависимость определяют известным методом приближения последовательности дискретных измерений. Вычислив значение
(D, при α=α(kα)), kα=1, …, Кα, kD=1, …KD, которые представлены последовательностями измерений в узлах КС, их удобно преобразовать в зависимости от непрерывного аргумента, используя последовательности измерений [zpqi] и интервалы дискретности δα и δD соответственно. Тогда значение в kα-м узле новой строки zα(kα) определяют как значение зависимости при D=Dнi, а эту зависимость определяют известным методом приближения последовательности дискретных измерений. Вычислив значение  , его присваивают kα-у узлу новой строки zα(kα). Выполнив таким образом цикл по kα=1, … Kα, получают последовательность значений в узлах новой строки [Zα(kα, при D=Dн0)], используя интерполяцию находят описанным выше способом максимум новой строки и его положение на шкале α принимают за новое, уточненное значение α0*. Следует отметить, что пространственная избирательность ПС по направлению в десятки раз превышает избирательность по дальности, в то же время (по этой же причине) оставаясь малочувствительной к отклонению дальности Dн от истинного D (в пределах вершины СО), поэтому сначала уточняют αн, а потом Dн. Используя уточненное значение α0*, получают новое значение D0* аналогично тому, как это делали при определении новой строки, а именно: строят фрагмент нового столбца по D с KD узлами при направлении α=α0* (т.е. в уточненной точке на непрерывной шкале). Для этого в каждом kD-м узле (kD=1, … KD) фрагмента КС считывают kD-ю строку
, его присваивают kα-у узлу новой строки zα(kα). Выполнив таким образом цикл по kα=1, … Kα, получают последовательность значений в узлах новой строки [Zα(kα, при D=Dн0)], используя интерполяцию находят описанным выше способом максимум новой строки и его положение на шкале α принимают за новое, уточненное значение α0*. Следует отметить, что пространственная избирательность ПС по направлению в десятки раз превышает избирательность по дальности, в то же время (по этой же причине) оставаясь малочувствительной к отклонению дальности Dн от истинного D (в пределах вершины СО), поэтому сначала уточняют αн, а потом Dн. Используя уточненное значение α0*, получают новое значение D0* аналогично тому, как это делали при определении новой строки, а именно: строят фрагмент нового столбца по D с KD узлами при направлении α=α0* (т.е. в уточненной точке на непрерывной шкале). Для этого в каждом kD-м узле (kD=1, … KD) фрагмента КС считывают kD-ю строку  из Kα значений
из Kα значений  (kα=1, …, Kα). Каждую строку преобразуют в зависимость
(kα=1, …, Kα). Каждую строку преобразуют в зависимость  и определяют значение в kD-м узле новой строки zD(kα) как значение зависимости при α=α0*. Эту зависимость определяют по значениям, измеренным в узлах kD-й строки
и определяют значение в kD-м узле новой строки zD(kα) как значение зависимости при α=α0*. Эту зависимость определяют по значениям, измеренным в узлах kD-й строки  известным методом приближения последовательности дискретных измерений. Выполнив таким образом цикл по kD=1, … KD, получают последовательность значений в узлах нового столбца [ZD(kD, при α=α0*)]. Используя интерполяцию, находят максимальное значение полученного фрагмента столбца ZDmax(D, при α=α0*), а положение его на шкале дальностей КШ принимают за новое значение дальности D0*. Для нахождения значений последовательностей
известным методом приближения последовательности дискретных измерений. Выполнив таким образом цикл по kD=1, … KD, получают последовательность значений в узлах нового столбца [ZD(kD, при α=α0*)]. Используя интерполяцию, находят максимальное значение полученного фрагмента столбца ZDmax(D, при α=α0*), а положение его на шкале дальностей КШ принимают за новое значение дальности D0*. Для нахождения значений последовательностей  , Zα(kα, D=Dнi),
, Zα(kα, D=Dнi),  , ZD(kD, α=αi*) на непрерывной шкале их преобразуют в зависимости от непрерывного аргумента
, ZD(kD, α=αi*) на непрерывной шкале их преобразуют в зависимости от непрерывного аргумента  ,
,  ,
,  и
и  соответственно с использованием, например, известного метода приближения последовательности дискретных измерений [z(x1), z(х2), …, z(xK)] многочленом z(x) по интерполяционной формуле Лагранжа [4, с. 676]. А для нахождения максимумов
соответственно с использованием, например, известного метода приближения последовательности дискретных измерений [z(x1), z(х2), …, z(xK)] многочленом z(x) по интерполяционной формуле Лагранжа [4, с. 676]. А для нахождения максимумов  (α, D=Dнi) и
(α, D=Dнi) и  определяют их производные
определяют их производные  и
и  по α и по D соответственно, а положения максимумов находят по точке пересечения производными шкал D и α соответственно.
по α и по D соответственно, а положения максимумов находят по точке пересечения производными шкал D и α соответственно.
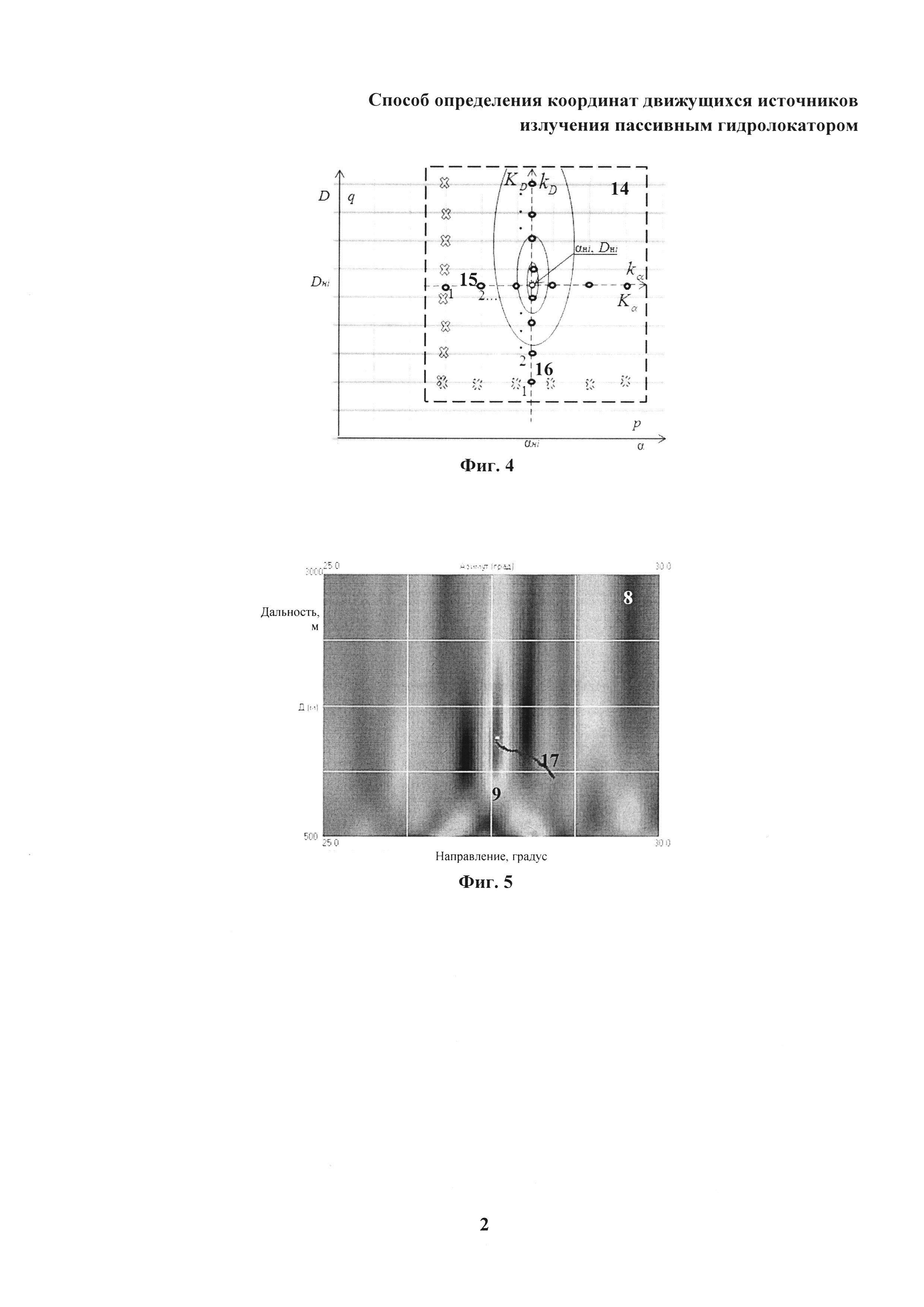
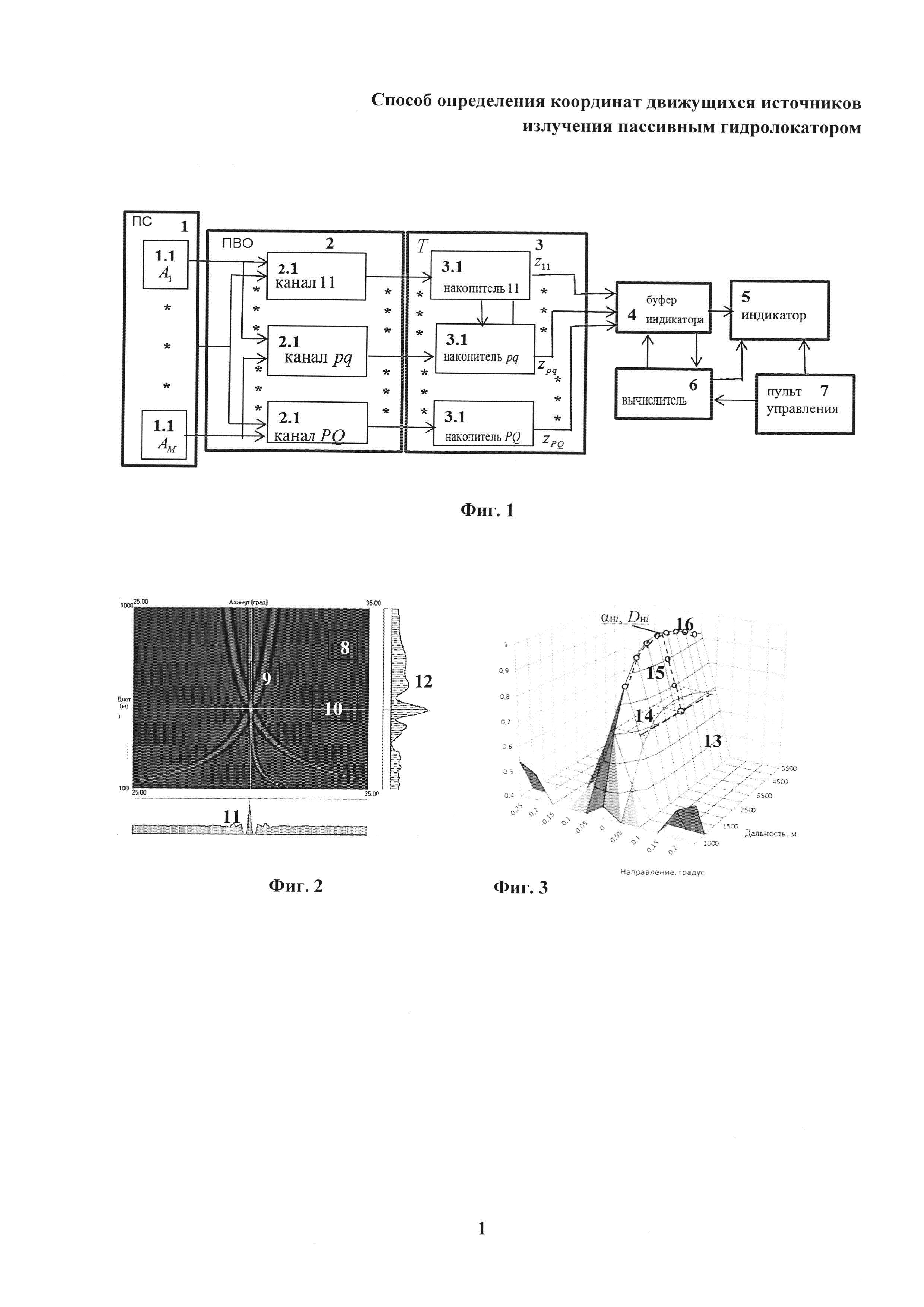
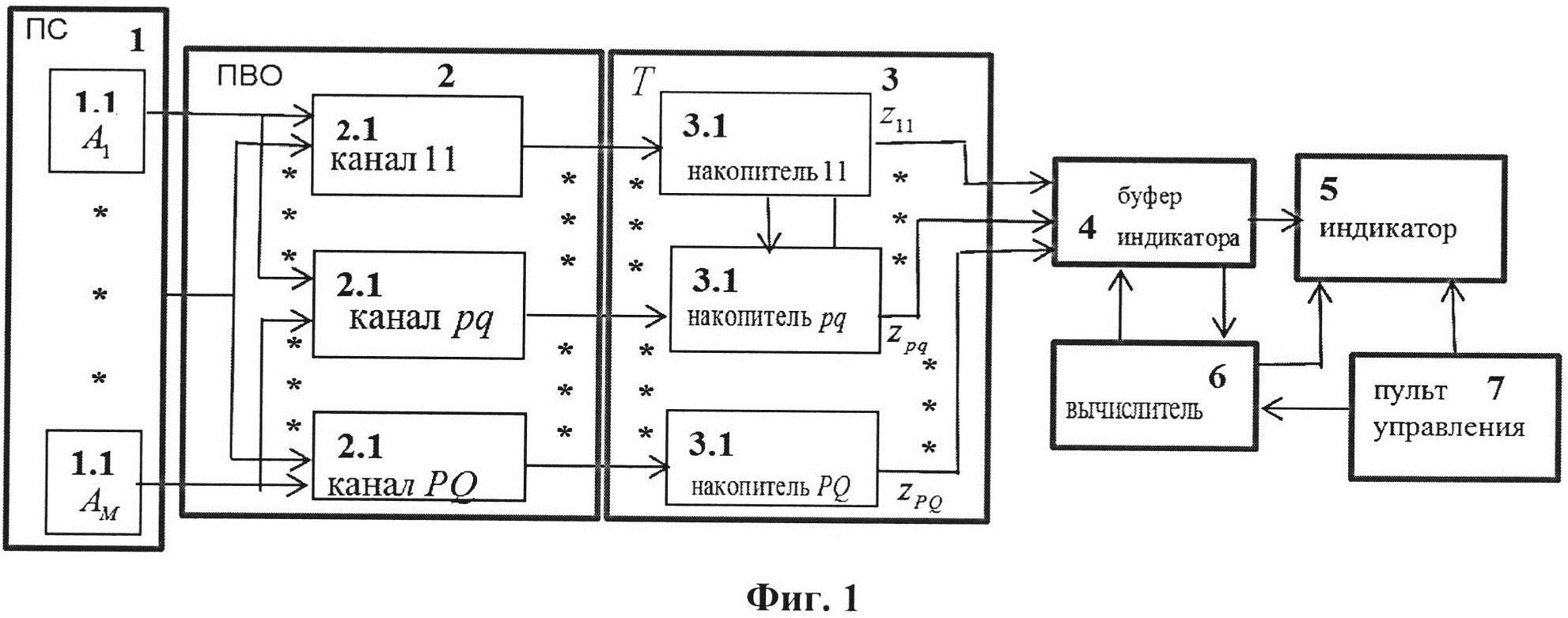
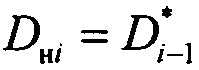
Сущность предлагаемого изобретения поясняется фигурами 1-5. На фиг. 1 приведен пример блок-схемы устройства, реализующего заявляемый способ, на фиг. 2 приведен пример индикаторной картины 8, отображающей отклик ПС на поле сигнала [zpqi], в плане с цветовым кодированием уровня, с сигнальной отметкой 9 одиночного источника излучения на индикаторе пассивного гидролокатора и визиром 10, а также графики сечений СО по α - 11 и по D - 12, проходящих через максимум СО. На фиг. 3 показана крупно вершина 13 сигнальной отметки 9 в аксонометрии с фрагментом координатной сетки 14 и фрагментами новой строки 15 и нового столбца 16, пересекающихся в точке αнi, Dнi. Ha фиг. 4 - пример схематического изображения фрагмента координатной сетки 14 размером Kα строк, KD столбцов, при Kα=6, KD=8 с точкой наведения αнi, Dнi и с фрагментами новой строки 15 для дальности Dнi с Kα узлами и нового столбца 16 с KD узлами для направления αнi; на фиг. 5 - пример индикаторной картины 8 с сигнальной отметкой 9 от движущегося источника сигнала и трассой 17 автоматического слежения за ее максимумом по предлагаемому способу.
Устройство (фиг. 1) содержит приемную систему 1 из М антенн 1.1 с М каналами предварительной обработки, выходы которых соединены в блоке 2 с каналами пространственно-временной обработки 2.1, соединенными по выходам с многоканальным накопителем 3, выходы которого соединены со входами буфера индикатора 4, который соединен с индикатором 5, и с вычислителем 6, который соединен с блоком управления 7 и индикатором 5.
Блоки 1-5 соответствуют схеме прототипа и известны из патента [4], блок 6 представляет собой программируемый процессор, блок 7 - устройство управления - программируемый контроллер.
С использованием устройства (фиг. 1) предложенный способ реализуется следующим образом. Шумы моря, содержащие полезный сигнал, принимаются приемной системой 1, содержащей М антенн и каналов предварительной обработки 1.1 (усиление, фильтрация, синхронное АЦП, БПФ), затем сигналы поступают в блок 2 включающий каналы взаимно-корреляционной межантенной обработки 2.1, образующие P×Q компенсированных пространственных каналов, выходы которых накапливаются с временем осреднения Т в блоке 3 в P×Q каналах 3.1, откуда циклически (i=1, 2, …) с интервалом Т поступают в буфер индикатора 4 (запоминающее устройство), связанный с индикатором 5 и вычислителем 6, который связан с пультом управления 7, из которого поступают координаты точки наведения, которую выбирает оператор на индикаторе 5, и дает команду начала автоматического слежения. Пример индикаторной картины 8 с сигнальной отметкой (СО) 9 и визиром 10 показан на фиг. 2, где также показаны для наглядности сечения СО по направлению 11 и по дальности 12, проходящие через максимум СО. По этим данным вычислитель 6 выбирает и фиксирует информацию фрагмента КС 14 в заданных 6×8 узлах. Фрагмент КСi схематически показан на фиг. 3 - на изображении вершины СО в аксонометрии и на фиг. 4 - в плане, с фрагментом координатной сетки (пунктирный прямоугольник 14). В качестве примера здесь приведен фрагмент КС из 6 «столбцов» и 8 «строк» - всего 48 узлов, Далее определяют в этом фрагменте КС новые строку 15 и столбец 16 в непрерывной шкале вне дискретной КС с точкой пересечения в точке наведения αнi, Dнi, (здесь i - индекс цикла накопления и обновления информации в буфере 4). На фиг. 4 эта новая строка проходит между 4-й и 5-й строками фрагмента КС, а новый столбец - между 3-м и 4-м столбцами фрагмента КС.
Для определения новой строки 15 при дальности D=Dнi используют непрерывные шкалы по α и D. Для первого узла новой строки (kα=1, считая от левого края фрагмент КС 14) используют первый столбец из KD узлов (на фиг. 4 узлы первого столбца помечены  ), преобразуют последовательность измерений в узлах столбца в зависимость от непрерывного аргумента. В частности, практически хороший результат обеспечивает интерполяционный метод Лагранжа [3]. Вычисляют значение
), преобразуют последовательность измерений в узлах столбца в зависимость от непрерывного аргумента. В частности, практически хороший результат обеспечивает интерполяционный метод Лагранжа [3]. Вычисляют значение  , при D=Dнi и присваивают это значение kα-му узлу искомой новой строки. Заполнив таким образом узлы новой строки, преобразуют последовательность измерений в зависимость от непрерывного аргумента и находят ее производную
, при D=Dнi и присваивают это значение kα-му узлу искомой новой строки. Заполнив таким образом узлы новой строки, преобразуют последовательность измерений в зависимость от непрерывного аргумента и находят ее производную  и точку пересечения ею оси α, для чего вычисляют значения производной
и точку пересечения ею оси α, для чего вычисляют значения производной  , перебирая значения α с малым шагом, например dα=δα/100, до получения значений, близких к нулю с удовлетворяющей точностью при некотором
, перебирая значения α с малым шагом, например dα=δα/100, до получения значений, близких к нулю с удовлетворяющей точностью при некотором  .. Имея уточненное значение
.. Имея уточненное значение  , подобным же образом получают новое значение
, подобным же образом получают новое значение  , определяя фрагмент нового столбца по D с KD узлами при направлении
, определяя фрагмент нового столбца по D с KD узлами при направлении  , для чего в каждом kD-м узле (kD=1, … KD, считая от нижнего края фрагмента КС 14) считывают Kα значений
, для чего в каждом kD-м узле (kD=1, … KD, считая от нижнего края фрагмента КС 14) считывают Kα значений  kD-й строки с kα=1, …, Kα (на фиг. 4 первая строка, kD=1 помечена
kD-й строки с kα=1, …, Kα (на фиг. 4 первая строка, kD=1 помечена  ). Используя интерполяцию, переходят к зависимости от непрерывного аргумента и ее значение присваивают kD-му узлу искомого нового столбца. Используя интерполяцию, значения в узлах нового столбца, преобразуют в зависимость от непрерывного аргумента, находят ее максимум, а положение его на шкале дальностей КШ принимают за новое значение дальности
). Используя интерполяцию, переходят к зависимости от непрерывного аргумента и ее значение присваивают kD-му узлу искомого нового столбца. Используя интерполяцию, значения в узлах нового столбца, преобразуют в зависимость от непрерывного аргумента, находят ее максимум, а положение его на шкале дальностей КШ принимают за новое значение дальности  . Координаты
. Координаты  ,
,  выдаются на индикатор 5 для представления оператору в цифровом виде или в виде точек, образующих трассу слежения, как на фиг. 5, фрагмент 17. По окончании i-го цикла накопления и смены информации в блоке 4 по команде, поступающей из блока 7, в блоке 6 повторяются действия режима слежения с новыми αнi+1, Dнi+1, равными
выдаются на индикатор 5 для представления оператору в цифровом виде или в виде точек, образующих трассу слежения, как на фиг. 5, фрагмент 17. По окончании i-го цикла накопления и смены информации в блоке 4 по команде, поступающей из блока 7, в блоке 6 повторяются действия режима слежения с новыми αнi+1, Dнi+1, равными  ,
,  соответственно, полученными на предыдущем цикле.
соответственно, полученными на предыдущем цикле.
Работоспособность предлагаемого способа подтверждена расчетами, моделированием и экспериментальными проверками на записях, сделанных при натурных испытаниях пассивных гидролокаторов в реальных условиях (например, см. фиг. 5).
Источники информации
1. Г.С. Малышкин. Оптимальные и адаптивные методы обработки гидроакустических сигналов. Том 1. СПб.: «Концерн «ЦНИИ «Электроприбор», 2011. С. 272, 279.
2. Г.В. Лоскутова, К.И. Полканов. Пространственно-частотные и частотно-волновые методы описания и обработки гидроакустических полей. СПб.: Наука, 2007. С. 148.
3. Г. Корн, Т. Корн. Справочник по математике. М.: Наука, 1974. С. 676, 682, 684.
4. Патент РФ №2507531, кл. МПК G01S 3/80, опубликован 20.02.2014 г.




















Способ обработки сигнала шумоизлучения объекта
Антенная система эхолота для надводного корабля
Способ измерения скорости звука
Гидроакустический способ определения пространственных характеристик объекта на дне
Гидроакустический способ обработки рыбопромысловой информации
Гидролокационный способ обнаружения подводных объектов в контролируемой акватории
Способ измерения радиальной скорости объекта по его шумоизлучению
Способ цветового кодирования информации гидроакустического шумопеленгования
Гидроакустический способ измерения глубины погружения неподвижного объекта
Активный гидролокатор
Способ пассивного определения координат источников излучения
Способ определения глубины погружения нижней точки айсберга
Способ пассивного определения координат движущегося источника излучения
Способ пассивного определения координат источников гидроакустического излучения
Способ пассивного определения координат источников гидроакустического излучения
Способ пассивного определения координат движущегося слабого источника излучения

