Результат интеллектуальной деятельности: Способ измерения скорости движения цели гидролокатором
Вид РИД
Изобретение
Настоящее изобретение относится к области гидроакустики и может быть использовано для автоматического измерения полной скорости движения объекта с использованием гидролокатора ближнего действия.
Все современные гидролокаторы, предназначены для измерения параметров движения обнаруженного объекта, к которым относится дистанция до объекта, скорость движения объекта и угловое положения объекта относительно направления движения гидролокатора, которое называется курсовым углом объекта. Известен гидролокатор, (А.С. Колчеданцев. Гидроакустические станции. Л.:Судостроение, 1982 г., стр. 54), в котором приведена структурная схема гидролокатора, определяющего дистанцию и радиальную составляющую скорости по величине изменения расстояния за время между двумя циклами излучение-прием.
Недостатком данного аналога является то, что дистанция и радиальная скорость измеряется оператором по положению отметки на индикаторе отображения, тангенциальная составляющая скорости и полная скорость не определяется.
Известны гидролокаторы, которые позволяют за один цикл излучения-приема вести наблюдение за объектами, находящимися в секторе 360°. Для этого они формируют статический веер характеристик направленности. В этом случае направление на цель определяется не изменением положения антенны, а шириной характеристики направленности статического веера (там же, стр. 63) и ее положением относительно направления движения. Способ, реализованный в гидролокаторе кругового обзора, содержит следующие операции: излучение зондирующего сигнала, прием эхосигнала, обнаружение объекта, измерение дистанции, измерение радиальной скорости объекта, измерение курсового угла объекта по номеру пространственного канала, связанного с характеристикой направленности.
Недостатком данного способа является то, что направление на цель определяется оператором по номеру характеристики направленности (пространственного канала), ширина которой может быть значительной и именно ширина определяет точность измерения курсового угла цели. Кроме того, тангенциальная составляющая скорости цели не определяется и полная скорость цели так же не определяется.
Известна «Система активной гидролокации» по патенту РФ №2393503, содержащая излучающую и приемную акустические антенны, последовательно соединенные устройство формирования зондирующего сигнала, устройство формирования характеристик направленности в излучении, генераторное устройство, последовательно соединенные устройство формирования характеристик направленности системы гидролокации (ГЛ) в приеме и устройство обработки эхосигналов от цели, также содержащая устройство измерения дистанции до цели, устройство измерения радиальной составляющей скорости цели (ВИР), последовательно соединенные устройство формирования характеристик направленности системы шумопеленгования (ШП), устройство обработки сигналов системы ШП, устройство измерения пеленга на цель системы ШП и блок определения величины изменения пеленга (ВИП), также содержащая последовательно соединенные блок определения общей тангенциальной составляющей скорости и блок определения тангенциальной составляющей скорости цели, также содержащая блок определения скорости цели, блок определения курса цели и блок связи ГАС с системами корабля.
В этой системе гидролокации реализована следующая последовательность операций: излучение зондирующего сигнала, прием эхосигнала, измерение дистанции, измерение направления на цель по пространственному положению отметки эхосигнала на индикаторе, прием сигнала шумоизлучения, определение пеленга на цель в режиме шумопеленгования, определение величины изменения пеленга за фиксированное время наблюдения, определение тангенциальной составляющей скорости цели по данным шумопеленгования, определение полной скорости цели, определение курсового угла движения цели.
Это техническое решение является наиболее близким аналогом и может быть принято в качестве прототипа.
Недостатком данного технического решения является то, что тангенциальная составляющая скорости цели определяется оператором по величине изменения пеленга в режиме шумопеленгования, которое требует значительного времени наблюдения и наличие шумоизлучения цели, что в большинстве случаев неприемлемо, поскольку сигнал шумоизлучения не всегда может быть обнаружен.
Задачей предлагаемого технического решения является обеспечение автоматического измерения тангенциальной составляющей скорости, радиальной составляющей скорости, полной скорости движения цели по данным гидролокации.
Для решения поставленной задачи в способ, содержащий излучение зондирующего сигнала неподвижным гидролокатором, прием эхосигнала статическим веером характеристик направленности (пространственных каналов при обработки), измерение уровня изотропной помехи после излучения зондирующего сигнала, выбор порога, определение номеров Ni пространственных каналов, в которых произошло превышение порога, измерение времен обнаружения эхосигналов, измерение дистанции, измерение радиальной скорости, измерение направления на цель введены новые признаки, а именно: определяют максимальную амплитуду обнаруженного эхосигнала Ai в каждом пространственном канале Ni, сравнивают времена обнаружений этих амплитуд и при совпадении времен определяют номера пространственных каналов, в которых совпадение произошло, и если эти пространственные каналы являются соседними, принимают решение, что принятый эхосигнал от одного объекта, а курсовой угол цели определяют по формуле  где Δβ° - ширина характеристики пространственного канала, Ni - номер пространственного канала, в котором произошло превышение порога и измерена максимальная амплитуда эхосигнала, Ai - значение максимальной амплитуды эхосигнала в канале Ni, Ai±1 - значение максимальной амплитуды в соседнем пространственном канале Ni±1, где обнаружен эхосигнал в том же временном интервале, излучают второй и последующий зондирующий сигналы, в каждом цикле излучение-прием с номером M определяют дистанцию Дм, определяют курсовой угол цели
где Δβ° - ширина характеристики пространственного канала, Ni - номер пространственного канала, в котором произошло превышение порога и измерена максимальная амплитуда эхосигнала, Ai - значение максимальной амплитуды эхосигнала в канале Ni, Ai±1 - значение максимальной амплитуды в соседнем пространственном канале Ni±1, где обнаружен эхосигнал в том же временном интервале, излучают второй и последующий зондирующий сигналы, в каждом цикле излучение-прием с номером M определяют дистанцию Дм, определяют курсовой угол цели  где M - номер зондирующего сигнала, определяют величину изменения курсового угла ΔКУ=(КУ1-КУм), если ΔКУ=0, то измеренная радиальная скорость равна полной скорости, если ΔКУ не равно 0, то определяют тангенциальную составляющую изменения расстояния Дт, пройденного целью за время МТ, где T - длительность цикла излучение-прием, по формуле Дт=Дм SinΔКУ°, определяют тангенциальную скорость цели Vт.ц по формуле Vт.ц=Дт/МТ, определяют радиальную скорость цели Vp.ц по формуле Vp.ц=Vтц tgΔКУ°, а полную скорость цели определяем как
где M - номер зондирующего сигнала, определяют величину изменения курсового угла ΔКУ=(КУ1-КУм), если ΔКУ=0, то измеренная радиальная скорость равна полной скорости, если ΔКУ не равно 0, то определяют тангенциальную составляющую изменения расстояния Дт, пройденного целью за время МТ, где T - длительность цикла излучение-прием, по формуле Дт=Дм SinΔКУ°, определяют тангенциальную скорость цели Vт.ц по формуле Vт.ц=Дт/МТ, определяют радиальную скорость цели Vp.ц по формуле Vp.ц=Vтц tgΔКУ°, а полную скорость цели определяем как
 .
.
Существо предлагаемого изобретения заключается в следующем. При работе гидролокатора измеряют дистанцию до цели и радиальную скорость цели как величину изменения расстояния за время между последовательными излучениями зондирующих сигналов, что характеризует скорость сближения гидролокатора и цели. Это справедливо, если цель движется непосредственно на гидролокатор и излучение зондирующего сигнала и прием эхосигнала, отраженного от цели по первой и второй посылке, совпадают с направлением движения. В случае если они не совпадают, возникает ошибка в определении радиальной скорости сближения, которая зависит от разности углов, под которыми происходило измерение дистанций. Поскольку в гидролокаторах прежних разработок измерение дистанции производилось оператором, то ошибка измерения радиальной скорости считалась незначительной и на нее не обращали внимания. Существующие цифровые методы обработки эхосигналов позволяют автоматизировать процесс измерения, повысить точность измерения радиальной скорости, тангенциальной составляющей скорости и полной скорости цели. Прежде всего, для этого необходимо автоматическое измерение направление приема эхосигнала с использованием статического веера характеристик направленности. Ширина характеристики направленности определяет погрешность измерения курсового угла обнаруженного объекта. В зависимости от скорости перемещения объекта его положение может изменяться относительно положения гидролокатора, что и будет определять погрешность измерения скорости объекта по отраженному эхосигналу. Если соседние характеристики направленности пересекаются на уровне 0,7 от максимума, то эхосигнал будет всегда обнаруживаться в двух характеристиках направленности с наибольшими амплитудами. Соотношения амплитуд эхосигналов будут определять положение объекта относительно этих характеристик. Если в одной характеристики эхосигнал обнаруживается на максимуме характеристики, то амплитуда эхосигнала будет максимальной, а в соседней характеристике амплитуда эхосигнала будет меньше. Если положение объекта будет находиться на пересечении двух характеристик направленности на уровне 0,7, то амплитуды эхосигналов будут равны Ai=Aj и тогда курсовой угол будет равен КУ°=NiΔβ°+0,5Δβ°, где Ni - номер характеристики направленности от направления движения, Δβ° - ширина характеристики направленности. Таким образом, по соотношению амплитуд в соседних характеристиках направленности можно автоматически оценивать курсовой угла обнаруженного объекта с погрешностью меньше, чем ширина характеристики направленности, и тем самым повысить точность измерения курсового угла по одной посылке. После чего производится определение величины изменения курсовых углов за время МТ, где T - время между излучениями, M - число излучений. Для дистанции Дм имеем ΔКУ=(КУ1-КУм), после чего можно получить дистанцию, пройденную объектом в тангенциальном направлении за время между M посылками, Дт=Дм SinΔКУ° и тангенциальную составляющую скорости цели по формуле Vт.ц=Дт\МТ, тогда скорость сближения или радиальная составляющая скорости цели Vр.ц=Vт tgΔКУ° а полную скорость цели определяем как  .
.
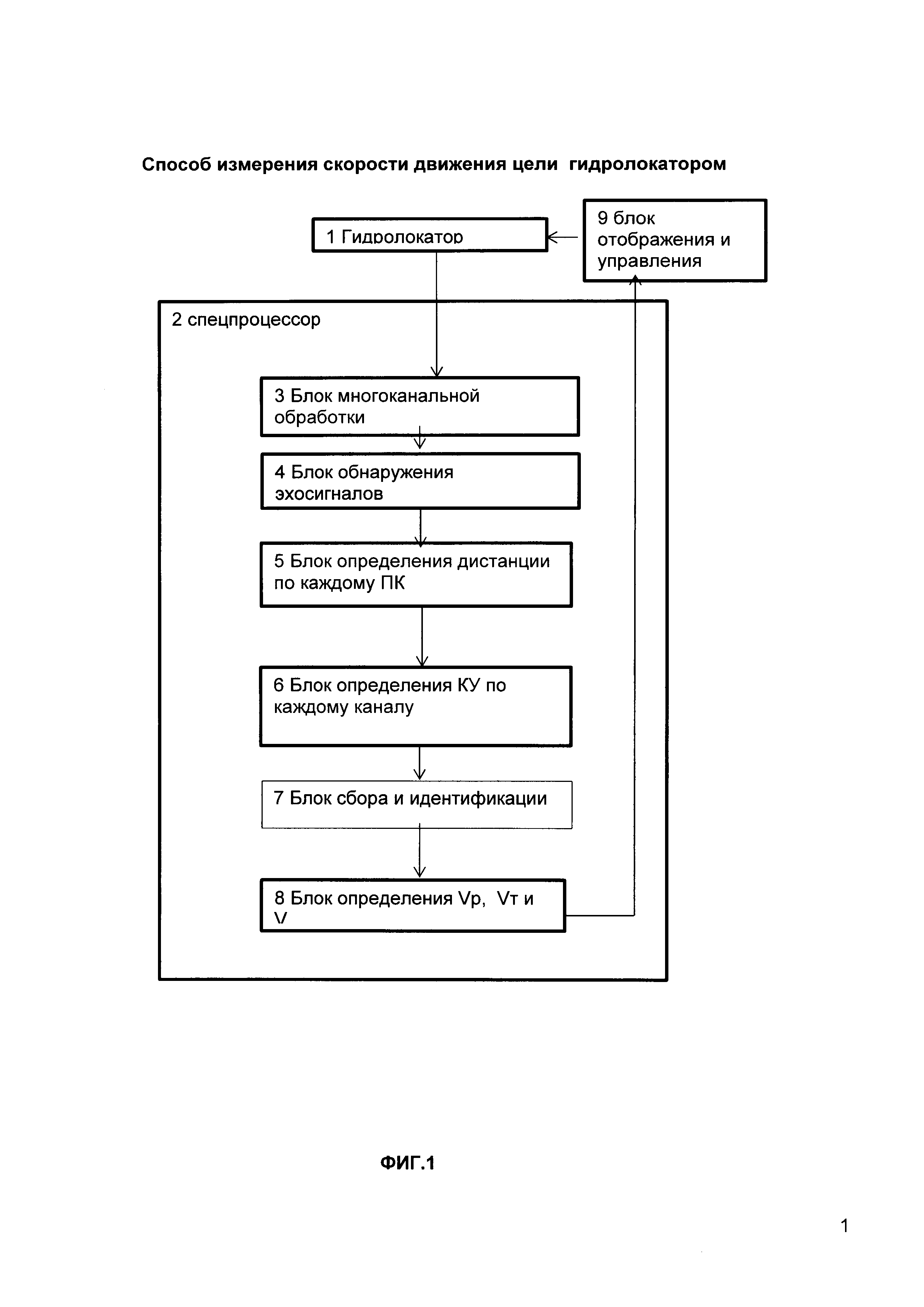
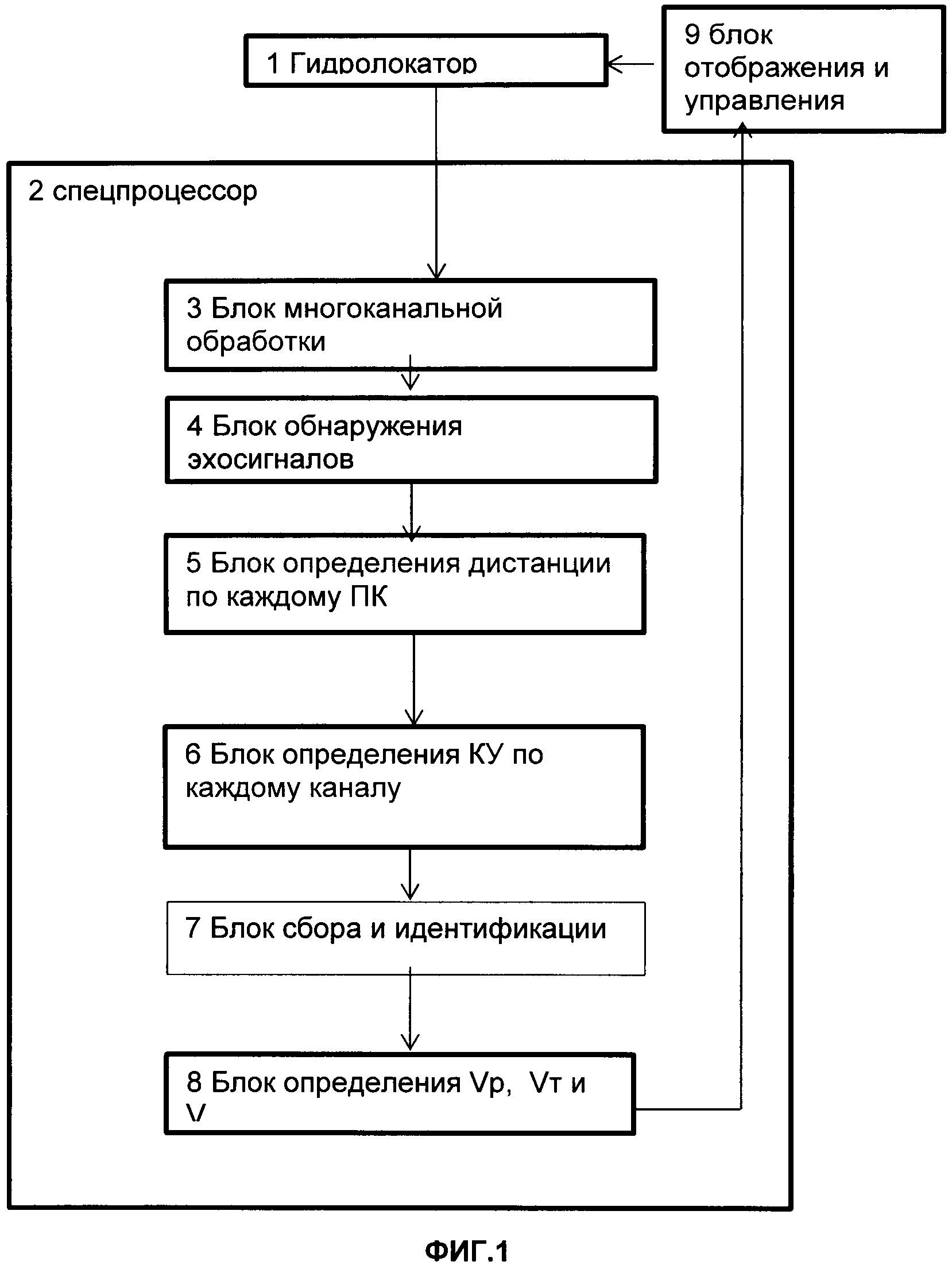
На фиг. 1 представлена блок схема устройства, реализующая предлагаемый способ.
Устройство (фиг. 1) содержит гидролокатор 1 с антеннами излучения и приема, который соединен со спецпроцессором 2, в состав которого входят последовательно соединенные блок 3 многоканальной обработки статического веера характеристик направленности, блок 4 обнаружения эхосигнала в каждом пространственном канале, блок 5 определения дистанции по каждому пространственному каналу, блок 6 определения курсового угла по каждому пространственному каналу, блок 7 сбора и идентификации информации, блок 8 определения тангенциальной составляющей скорости цели, определение радиальной составляющей скорости цели и определение полной скорости цели. Выход спецпроцессора 2 соединен со входом блока 9 отображения и управления, выход которого соединен со входом гидролокатора 1.
Заявленный способ целесообразно изложить на примере работы устройства, его реализующего.
Из блока 9 управления и отображения поступает сигнал в гидролокатор 1, который излучает сигнал в водную среду и принимает отраженные эхосигналы. Блок 1 - гидролокатор с антеннами приема и излучения являются известными устройствами, которые используются в прототипе и достаточно подробно изложены в литературе по гидроакустике (А.С. Колчеданцев. «Гидроакустические станции». Л.: Судостроение, 1982 г., «Справочник по гидроакустике», Л.: Судостроение, 1988 г.). Как правило, гидролокаторы имеют статический веер характеристик направленности в приеме. Принятые эхосигналы поступают на спецпроцессор 2 в блок 3 многоканальной обработки, где формируются цифровые последовательные временные реализации по каждой характеристики направленности и производится обработка принятых реализаций.
Блок 2 - цифровые спецпроцессоры являются известными устройствами, которые предназначены для осуществления конкретных алгоритмов обработки с использованием аппаратных решений и жесткой логикой вычислений. Их применение повышает быстродействие цифровых вычислительных систем в несколько раз, и в большинстве случаев сокращает аппаратные затраты. Описания спецпроцессоров приведены в кн.: Корякин Ю.А., Смирнов С.А., Яковлев Г.В. «Корабельная гидроакустическая техника», Санкт Петербург: Изд. Наука, 2004 г., стр. 281. Там же приведено описание гидроакустических комплексов, построенных на основе спецпроцессоров стр. 296., стр. 328. С использованием этих же процессоров могут быть реализованы вновь введенные блоки предлагаемого изобретения.
В блоке 4 производится пороговое обнаружение эхосигналов. Эти эхосигналы с измеренными амплитудами и измеренными временами положения максимумов передаются в блок 5 определения дистанций по каждому пространственному каналу и выбор соседних пространственных каналов, в которых произошло превышение порога в одно и то же время. В блоке 6 производится определения курсового угла по измеренным амплитудам и пространственным каналам и величины изменения курсовых углов за время MT, где T - время между излучениями, M - число излучений. Полученная оценка пространственного канала и оценка дистанции передаются в блок 7 сбора и идентификации, где запоминаются и формируют массив данных для дальнейшей обработки, которая происходит в блоке 8. Для дистанции Дм имеем ΔКУ=(КУ1-КУм), после чего можно получить дистанцию, пройденную объектом в тангенциальном направлении за время между M посылками, Дт=Дм SinΔКУ° и тангенциальную составляющую скорости цели по формуле Vт.ц=Дт\MT. Тогда скорость сближения или радиальная составляющая скорости цели Vр.ц=Vт tgΔКУ°, а полная скорость цели будет определена как  Результаты вычисления тангенциальной составляющей скорости цели, радиальной составляющей и полная оценка скорости цели передаются в блок 9.
Результаты вычисления тангенциальной составляющей скорости цели, радиальной составляющей и полная оценка скорости цели передаются в блок 9.
Блоки 3, 4, 5, 6, 7, 8 могут быть реализованы с использованием цифровой обработки на основе пакетов расширения «Матлаб», которые обеспечивают последовательную процедуру вычисления заданных алгоритмов, рассмотрены в пособии А.Б. Сергиенко. «Цифровая обработка сигналов». Санкт Петербург, 2011 г., стр. 655.
Блок 9 отображения и управления является известным устройством, которое используется в прототипе, в аналогах и во всех современных гидролокационных станциях для обеспечения управлением работы и отображением результата.
Таким образом, предлагаемая процедура измерения позволяет автоматически определить тангенциальную составляющую скорости движения, уменьшить погрешность измерения радиальной составляющей скорости и автоматически определить полную скорость, что позволит более точно прогнозировать перемещения объекта, обнаруженного гидролокатором.








Способ обработки сигнала шумоизлучения объекта
Антенная система эхолота для надводного корабля
Способ измерения скорости звука
Гидроакустический способ определения пространственных характеристик объекта на дне
Гидроакустический способ обработки рыбопромысловой информации
Гидролокационный способ обнаружения подводных объектов в контролируемой акватории
Способ измерения радиальной скорости объекта по его шумоизлучению
Способ цветового кодирования информации гидроакустического шумопеленгования
Гидроакустический способ измерения глубины погружения неподвижного объекта
Активный гидролокатор
Способ обнаружения и классификации сигнала от цели
Способ определения глубины погружения приводняющегося объекта
Способ классификации объекта, обнаруженного гидролокатором
Способ измерения параметров перемещения источника зондирующих сигналов
Гидроакустическая система
Способ измерения толщины льда с подводного носителя
Способ определения скорости звука
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Способ определения ошибки оценки дистанции гидролокатором
Способ определения глубины погружения объекта

