Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АЙСБЕРГА ГИДРОЛОКАЦИОННЫМ МЕТОДОМ
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано на гидроакустических станциях для обнаружения айсбергов и оценки их характеристик.
Морские сооружения Арктики (в том числе нефтяные и газовые буровые платформы) нуждаются в защите от ледяных образований (в первую очередь айсбергов). До начала использования буровых платформ в Арктике целенаправленных задач обнаружения приближающихся айсбергов на больших дистанциях не ставилось, поэтому отсутствовала аппаратура обнаружения айсбергов и статистика эхосигналов, принятых при локации айсбергов.
Известен способ определения осадки айсберга по патенту РФ №2541435, в котором излучают зондирующий сигнал, принимают эхосигнал статическим веером характеристик направленности в вертикальной плоскости, определяют эхосигнал от айсберга, определяют эхосигнал от поверхности, определяют ширину зоны тени и по ее величине определяют величину осадки айсберга.
Недостатком данного способа является необходимость глубокого погружения приемной антенны, при том, что обнаружение зоны тени производят на водной поверхности, что требует наличия спокойного моря в районе и ровной отражающей поверхность при определении начала поверхностной реверберации, что не всегда может быть обеспечено условиями работы.
Наиболее близким к предлагаемому способу по количеству общих признаков является способ определения осадки айсберга (вертикального размера его подводной части) по патенту РФ №2548596 от 14.01.2014. Способ определения осадки айсберга содержит излучение зондирующего сигнала, прием эхосигнала, фильтрацию, детектирование и вывод на индикатор. Прием эхосигнала осуществляют статическим веером характеристик направленности в вертикальной плоскости, при этом каждая характеристика имеет ширину раствора по вертикали α. В способе измеряют уровень изотропной помехи, определяют порог, измеряют время превышения эхосигналом выбранного порога в каждом пространственном канале по вертикали, определяют длительность эхосигнала в каждом канале, отбирают каналы, в которых произошло обнаружение эхосигналов в одно и тоже время по правилу Тпрев>Тиз, где Тпрев - длительность превышения над порогом, а Тиз - длительность излученного сигнала, выбирают характеристику направленности с максимальным номером, фиксируют момент обнаружения эхосигнала от айсберга тм.а., фиксируют момент обнаружения эхосигнала от дна Тдна, определяют дистанцию до нижней точки айсберга Ддна, определяют начала отражения от дна Ддна. Определяют наклон характеристики направленности β, определяют угол обнаружения сигнала донной реверберации по формуле cos(β)=(Нм-h)/Ддна, где Нм - глубина места, h - глубина размещения фазового центра приемной антенны, определяют осадку айсберга (вертикальный размер его подводной части) по формуле На=(Ддна-Дa)cos(β).
Недостатком указанного способа является то, что для его реализации необходимо обнаружение тени от айсберга на дне, что возможно в основном только при малых дистанциях, при больших дистанциях наличие объемной реверберации сглаживает наличие зоны тени от айсберга на дне, что исключает ее обнаружение. Это снижает эффективность использования рассматриваемого технического решения на больших дистанциях.
Задачей предлагаемого способа является обеспечения автоматического обнаружения айсберга и измерения горизонтальной и вертикальной протяженности его подводной части с использованием параметров эхосигнала, измеренных гидролокатором со статическим веером характеристик направленности в горизонтальной и вертикальной плоскостях.
Технический результат изобретения заключается в обеспечении автоматического обнаружения айсберга и автоматического определения горизонтального размера айсберга и вертикального размера подводной части айсберга.
Для обеспечения заявленного технического результата в известный способ, содержащий излучение зондирующего сигнала, прием эхосигнала статическим веером характеристик направленности в вертикальной плоскости, каждая из характеристик которых имеет одинаковую ширину раствора по вертикали а, фильтрацию, измерение уровня изотропной помехи, определения порога, измерение времени превышения эхосигналом выбранного порога в каждом пространственном канале по вертикали, определение длительности эхосигнала в каждом канале, включены новые признаки, а именно: формируют статический веер характеристик направленности в горизонтальной плоскости, определяют эхосигналы по вертикальным и горизонтальным характеристикам направленности, определяют времена, в которых произошло обнаружение эхосигналов в одно и тоже время по правилу Т=Тобн+вТдлит, где Тобн - время обнаружения эхосигнала в канале, Тдлит - длительность излучаемого сигнала, в – коэффициент, определяемый по результатам измерения акустических параметров айсберга в районе измерения, определяют количество горизонтальных каналов Мгор., в которых произошло обнаружение, определяют количество вертикальных каналов Мвер., в которых произошло обнаружение, определяют дистанцию до айсберга по минимальной оценке дистанции по формуле Добн=(Тобн-Тизл)⋅С, где Тизл - время излучения зондирующего сигнала, С - скорость звука в воде, определяют параметр Кгор=Мгор⋅Добн⋅sin(α/2), определяют параметр Квер=Mвep⋅Добн-sin(α/2), если Кгор<Квер, то принимают решение о наличии одиночного айсберга, при этом Кгор определяет горизонтальный размер подводной части одиночного айсберга, а Квер - вертикальный размер его подводной части, если Кгор>Квер, то принимают решение о наличии айсберга в ледовом поле, при этом Кгор определяет горизонтальный размер части ледового поля в области айсберга, а Квер - вертикальный размер подводной части айсберга.
Сущность предлагаемого способа основывается на возможностях прямого измерения параметров подводной части айсберга при отражении эхосигнала по нормали от освещаемой площади айсберга. Излучение зондирующего сигнала производится антенной, имеющей широкую характеристику направленности, что практически всегда имеет место, а прием эхосигналов осуществляется статическим веером характеристик направленности, которые имеют узкие характеристики направленности порядка 1°. Количество таких характеристик должно быть небольшим, порядка 10 штук, как в горизонтальной плоскости, так и в вертикальной плоскости. Известно, что, как правило, в вертикальной плоскости размеры айсберга превышают его размеры в горизонтальной плоскости. Это связано, прежде всего, с естественной ориентацией центра тяжести айсберга. Надводная часть айсберга составляет не более 20% от общего размера айсберга (Буйницкий В.Х. «Морские льды и айсберги Антарктики», Ленинградский университет, 1973 г.)
Поэтому, когда айсберг одиночный, его вертикальная площадь отражения определяет размеры подводной части айсберга. При приеме эхосигнала от айсберга значительных размеров статическим веером характеристик направленности обнаруживаются эхосигналы в нескольких вертикальных характеристиках направленности. При этом общим их качеством является нахождение эхосигналов в некотором временном стробе. Этот строб определяется длительностью отраженного эхосигнала и величиной задержки, связанной с угловым смещением нижней характеристики направленности, в котором обнаружен эхосигнал. Поскольку точно определить число характеристик направленности, в которых обнаружен эхосигнал до момента измерения нельзя, то определяют максимальную задержку для нижней характеристики направленности, что соответствует условию Т=Тобн+вТдлит, и определяют размер временного строба. Коэффициент в характеризует акустические параметры, связанные с неровностями отражающей структуры подводной части айсберга. Каждая характеристика направленности принимает эхосигнал от конкретного отражающего участка, вертикальный размер которого Ф1 можно определить, если известна дистанция до отражающего объекта и α - ширина характеристики направленности Ф1=Добн⋅sin(α/2). Измерения и оценки начинаются сразу, как только произошло отражение от айсберга, что соответствует минимальной дистанции до отражателя. По общему количеству характеристик направленности, в которых обнаружены эхосигналы в выбранном временном стробе, определяют вертикальный размер подводной части айсберга Квер=Мвер⋅Добн⋅sin(α/2), что характеризует его осадку или вертикальный размер подводной части айсберга. Аналогично происходят измерения эхосигналов, принятых в горизонтальной плоскости, также с использованием временного строба Кгор=Mгор⋅Добн⋅sin(α/2). Если размер по вертикали больше, чем размер по горизонтали Кгор.<Квер, то это означает, что айсберг одиночный. Если горизонтальный размер больше, чем вертикальный, Кгор>Квер, то это обстоятельство говорит о том, что айсберг перемещается в плотном ледовом поле.
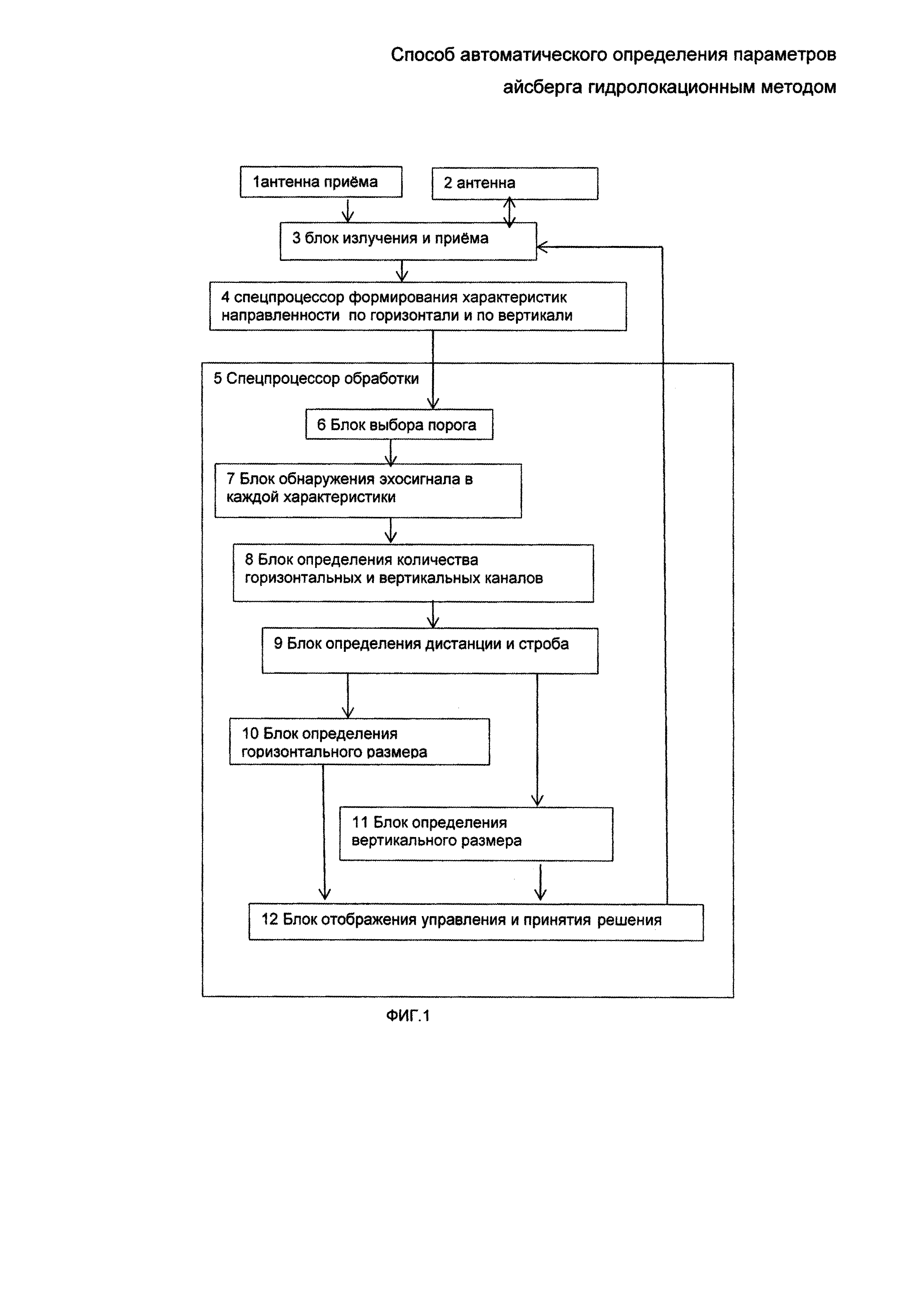
Сущность изобретения поясняется фиг. 1, на которой представлена блок-схема устройства, реализующего предложенный способ.
На фиг. 1 приемная антенна 1 последовательно соединена через блок 3 излучения и приема со спецпроцессором 4 формирования характеристик направленности по горизонтали и вертикали, выход которого соединен со спецпроцессором 5 обработки. Спецпроцессор 5 содержит последовательно соединенные блок 6 выбора порога, блок 7 обнаружение эхосигнала в каждой характеристике направленности, блок 8 определения количества горизонтальных и вертикальных каналов, блок 9 определения дистанции и строба, первый выход которого соединен с блоком 10, определение горизонтального размера и с первым входом блока 12 отображения управления и принятия решения., выход которого соединен со вторым входом блока 3 излучения и приема. Второй выход блока 9 через блок 11 определения вертикального размера соединен со вторым входом блока 12 отображения, управления и принятия решения.
Антенны 1 и 2 являются известными акустическими приборами. Так же блок 3 излучения и приема является известным устройством, используемым в прототипе (А.Н. Яковлев, Г.П. Каблов «Гидролокаторы ближнего действия». Судостроение. Л. 1983 г.). Для качественного решения задач обработки гидроакустической информации в современных корабельных гидроакустических средствах (станциях) используются спецпроцессоры на основе ЦВС, обладающие высокой производительностью, функциональной надежностью и малыми габаритами. С использованием специального алгоритмического и программного обеспечения спецпроцессорами могут решаться все задачи формирования и обработки принимаемых гидроакустических сигналов, в том числе для автоматического определения горизонтальных и вертикальных размеров айсберга (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника», СПб, изд. «Наука», 2004 г. Стр. 281).
Реализацию способа целесообразно рассмотреть на примере работы устройства. Зондирующий сигнал, который из блока 3 излучения и приема поступает на излучающую антенну 2, облучает окружающую акваторию. Отраженный эхосигнал поступает на приемную антенну 1, далее через блок 3 на спецпроцессор 4, где в приеме формируется статический веер характеристик направленности по горизонтали и вертикали. После этого информация по пространственным каналам поступает в спецпроцессор обработки 5. Порог в блоке 6 выбирается по уровню объемной реверберации, как среднее значение амплитуд всех отсчетов первого цикла обработки всех пространственных каналов. В блоке 7 определяются в каждом пространственном канале амплитуда отсчета, превысившего порог обнаружения, номер временного отсчета, номер пространственного канала. Если хотя бы в одном канале амплитуда эхосигнала существенно больше порога обнаружения и длительность эхосигнала больше длительности зондирующего сигнала, то принимается решение о наличии эхосигнала от цели, после чего выбираются временные циклы обработки соседних пространственных временных каналов и определяется общее количестве пространственных каналов по вертикали Мвер и горизонтали Мгор. В блоке 8 определяются общее количество горизонтальных и вертикальных обнаруженных каналов, значения которых передаются в блок 9, где определяются дистанция по каждому превышению и временные положения эхосигнала относительно строба, выработанного в блоке 9. Таким образом, определяется принадлежность горизонтальных и вертикальных каналов одной последовательной совокупности эхосигналов. В блоке 10 определяется горизонтальный размер айсберга Кгор=Mгор⋅Добн⋅sin(α/2), а в блоке 11 вертикальный размер айсберга Квер=Mвep-Добн⋅sin(α/2). Эти данные передаются в блок 12 для принятия решения и его отображения. В блоке 12 принимается автоматическое решение об обнаружении айсберга, о его размерах по вертикали и по горизонтали, а также о наличии ледового поля. Так же в блоке 12 принимается решение о необходимости формирования очередного сигнала излучения и повторения процедуры обработки.
Таким образом, используя результаты непосредственных измерения параметров эхосигнала вертикальными и горизонтальными характеристиками направленности, можно автоматически обнаружить айсберг и автоматически определить вертикальные размеры подводной части айсберга, а также наличие ледового поля и горизонтальные размеры айсберга.
Способ автоматического определения параметров айсберга гидролокационным методом, содержащий излучение зондирующего сигнала, прием эхосигнала статическим веером характеристик направленности в вертикальной плоскости, каждая из характеристик которых имеет одинаковую ширину раствора по вертикали α, фильтрацию, измерение уровня изотропной помехи, определения порога, измерение времени превышения эхосигналом выбранного порога в каждом пространственном канале по вертикали, определение длительности эхосигнала в каждом канале, отличающийся тем, что формируют статический веер характеристик направленности в горизонтальной плоскости, определяют времена, в которых произошло обнаружение эхосигналов в одно и то же время по правилу Т=Т+вТ, где Т - время обнаружения эхосигнала в канале, Т - длительность излучаемого сигнала, в – коэффициент, определяемый по результатам измерения акустических параметров айсберга в районе измерения, определяют количество горизонтальных каналов М, в которых произошло обнаружение, определяют количество вертикальных каналов М, в которых произошло обнаружение, определяют дистанцию до айсберга по минимальной оценке дистанции по формуле Д=(Т-Т)⋅С, где Т - время излучения зондирующего сигнала, С - скорость звука в воде, определяют параметр K=M·Д·sin(α/2), определяют параметр К=M·Д·Sin(α/2), если К<К, то принимают решение о наличии одиночного айсберга, при этом К определяет горизонтальный размер подводной части одиночного айсберга, а К - вертикальный размер его подводной части, если К>К, то принимают решение о наличии айсберга в ледовом поле, при этом Копределяет горизонтальный размер части ледового поля в области айсберга, а К - вертикальный размер подводной части айсберга.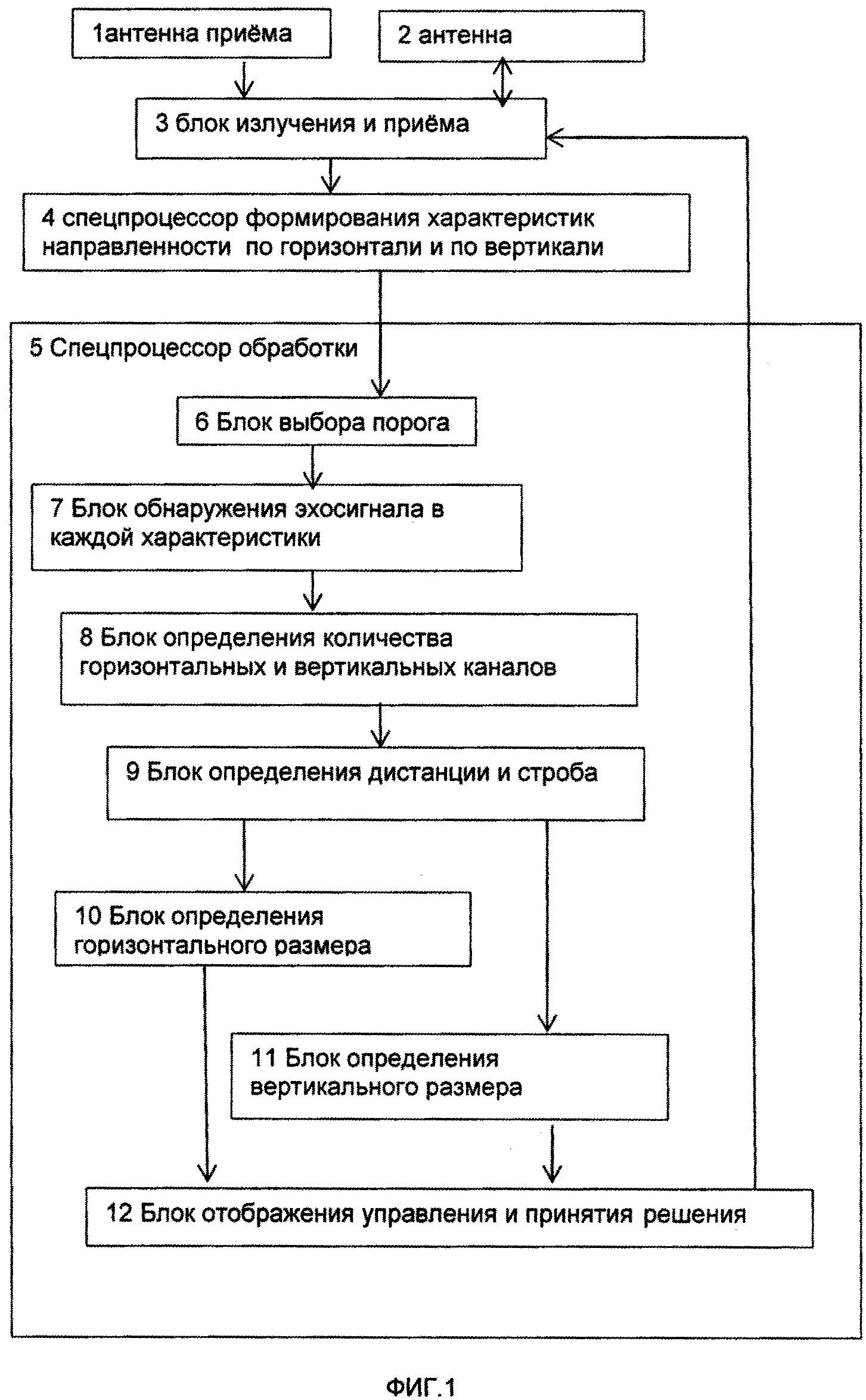
Способ обнаружения и классификации сигнала от цели
Способ определения глубины погружения приводняющегося объекта
Способ классификации объекта, обнаруженного гидролокатором
Способ измерения параметров перемещения источника зондирующих сигналов
Гидроакустическая система
Способ измерения толщины льда с подводного носителя
Способ определения скорости звука
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Способ определения ошибки оценки дистанции гидролокатором
Способ определения глубины погружения объекта
Способ обнаружения и классификации сигнала от цели
Способ определения глубины погружения приводняющегося объекта
Способ классификации объекта, обнаруженного гидролокатором
Способ измерения параметров перемещения источника зондирующих сигналов
Гидроакустическая система
Способ измерения толщины льда с подводного носителя
Способ определения скорости звука
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Способ определения ошибки оценки дистанции гидролокатором
Способ определения глубины погружения объекта

