Результат интеллектуальной деятельности: ВСПОМОГАТЕЛЬНОЕ УСТРОЙСТВО ПРИ ПОСАДКЕ ДЛЯ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА ИЛИ БЕЗРЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА С УСТАНОВКОЙ НА ТРИ ТОЧКИ
Вид РИД
Изобретение
Изобретение относится к вспомогательному устройству при посадке для рельсового транспортного средства или безрельсового транспортного средства, включающему в себя ступеньку, которая с возможностью смещения установлена на телах качения и/или на поверхностях скольжения, и соединенный со ступенькой приводной механизм, который установлен для выдвигания и вдвигания ступеньки.
Такое вспомогательное устройство при посадке, в принципе, известно из уровня техники. К примеру, такие вспомогательные устройства при посадке используются в (общественном) транспорте для перевозки пассажиров, для облегчения посадки в транспортное средство и высадки из транспортного средства и, соответственно, для предотвращения угрозы опасности для пассажиров. К примеру, ступенька рельсового транспортного средства служит для перекрытия зазора между рельсовым транспортным средством и платформой, когда рельсовое транспортное средство останавливается на территории вокзала. Таким образом, предотвращается возможность соскальзывания пассажиров в соответствующий зазор и их повреждения. Аналогичным образом, ступенька в автобусах может служить для перекрытия зазора между транспортным средством и бордюрным камнем тротуара. В принципе, ступенька может служить, к примеру, и для сглаживания разности высот между внутренним пространством транспортного средства и перроном или тротуаром, для облегчения посадки и высадки пассажиров с инвалидными креслами и детскими колясками. При этом некоторые автобусы могут также наклоняться вбок, благодаря чему ступенька также устанавливается наклонно вниз.
Как правило, ступенька, которая посредством приводного механизма может перемещаться между исходным и рабочим положениями, проводится по двум, расположенным параллельно друг другу, направляющим. Обычно для каждой направляющей предусмотрено два ролика, расположенных в направлении смещения на расстоянии друг от друга, так что предотвращается перекашивание ступеньки.
Эта система имеет некоторые недостатки. К примеру, ступенька может легко перекашиваться, к частности, когда она нагружается не симметрично. Тела качения/поверхности скольжения и, соответственно, поверхности качения направляющей при чрезмерной нагрузке могут быть также повреждены.
Поэтому задачей изобретения является создание улучшенного вспомогательного устройства при посадке для рельсового транспортного средства или безрельсового транспортного средства. В частности, вышеуказанные недостатки должны быть предотвращены или, по меньшей мере, смягчены.
Задача изобретения решается посредством вспомогательного устройства при посадке ранее указанного типа, у которого тела качения/поверхности скольжения
a) позиционированы ровно в трех, находящихся на расстоянии друг от друга и расположенных в треугольнике, несущих зонах, или
b) расположены на нескольких коромыслах и точки опоры коромысел позиционированы ровно в трех, находящихся на расстоянии друг от друга и расположенных в треугольнике, несущих зонах.
Благодаря этому, положение ступеньки определяется, в основном, как статичное. Иным образом, чем при наличии нескольких несущих зон, которые выявляются, к примеру, посредством четырех расположенных на расстоянии друг от друга роликов в уровне техники, усилия на несущие зоны, поэтому более предсказуемы. Нежелательный подъем несущей зоны от ее поверхности прилегания или поверхности ролика, который в соответствии с уровнем техники ведет к незапланированному чрезмерному нагружению остальных несущих зон, при представленном принципе действия исключен. Далее, благодаря этому, обеспечивается то обстоятельство, что несущие зоны подвергаются лишь предпочтительному пульсирующему нагружению, а не нежелательному переменному нагружению, как это возможно, к примеру, у ступеньки с четырьмя роликами. Благодаря тому, что подъем несущей зоны предотвращается, предотвращаются и повреждения, которые, вследствие удара несущей зоны, могут иметь место на ее поверхности прилегания или на поверхности ролика. В частности, отвержденные поверхности, в ином случае, могут быть разрушены уже при относительно небольшом нагружении и в течение короткого временного интервала.
Кроме того, опасность перекашивания направляющей ступеньки существенно снижается. Поэтому усилие, необходимое для надежного введения и выведения ступеньки, может быть лучше спланировано. Внеплановые остановки, которые являются причиной заклинивания ступенек, а также работы по приведению их в исправное состояние, могут быть, таким образом, предотвращены.
«Находящиеся на расстоянии друг от друга несущие зоны», соответственно, с несколькими телами качения/поверхностями скольжения охарактеризованы в рамках изобретения посредством того, что тела качения/поверхности скольжения одной несущей зоны образуют ясно распознаваемую группу или ясно распознаваемый «блок». То есть расстояние между отдельными телами качения/поверхностями скольжения в одной несущей зоне меньше, чем расстояние между телами качения/поверхностями скольжения в двух различных несущих зонах.
Находящиеся на расстоянии друг от друга несущие зоны и, соответственно, блоки могут быть соотнесены также с точками приложения усилий нескольких тел качения/поверхностей скольжения. К примеру, два тела качения/две поверхности скольжения могут быть соединены посредством коромысла, чтобы, с одной стороны, распределять нагрузку на несколько тел качения/поверхностей скольжения, а, с другой стороны, однако, также гарантировать, что тела качения/поверхности скольжения в любом случае выдержат эту нагрузку. Через вращающуюся опору коромысла может быть передано, в основном, лишь опорное усилие, однако, не крутящий момент. Такие точки приложения силы или точки опоры могут быть также расположены в треугольнике и, соответственно, могут образовывать блок. При этом положение самой ступеньки определяется тогда, в основном, еще как статическое, если тела качения/поверхности скольжения и/или только поверхности скольжения не образуют никакого блока, однако, указанные точки приложения сил или точки опоры обладают этим свойством.
Другие предпочтительные варианты осуществления и варианты усовершенствования изобретения выявляются из последующих зависимых пунктов формулы изобретения, а также из описания в сочетании с фигурами.
Благоприятным является, если расстояние между двумя несущими зонами, по меньшей мере, в пять раз больше их максимальной протяженности. Благодаря этому, положение ступеньки определяется, в основном, как статичное, так как несущие зоны малы по сравнению с расстоянием между ними. К примеру, расстояние между двумя несущими зонами может быть соотнесено с расстоянием между их центрами или с расстоянием между центрами тяжести их поверхностей, а также с их (минимальным) расстоянием до кромки.
Предпочтительным является, если на каждую несущую зону предусмотрено ровно одно тело качения, или одна поверхность скольжения, или одна точка опоры. То есть, количество тел качения/поверхностей скольжения/точек опоры равно трем. Определение положения ступеньки как статическое, поэтому особенно благоприятно.
Особенно благоприятным является далее, если все несущие зоны относительно направления перпендикулярно направлению движения ступеньки находятся на расстоянии друг от друга. Каждая несущая зона назначена, таким образом, собственной направляющей. Гарантия от перекашивания при таком варианте осуществления, поэтому особенно высока. Однако, возможно также, чтобы несущие зоны были назначены двум направляющим или лишь одной направляющей.
Следующий предпочтительный вариант осуществления вспомогательного устройства при посадке имеет место, если первая и вторая несущие зоны в направлении движения ступеньки располагаются на ступеньке ближе, чем третья несущая зона, причем первая и вторая несущие зоны в направлении движения ступеньки удалены от ступеньки на равные расстояния. При таком варианте осуществления изобретения две несущие зоны находятся, таким образом, вблизи ступеньки, в частности, вблизи ее боковых кромок. Третья несущая зона находится несколько дальше от ступеньки и относительно ширины ступеньки располагается в предпочтительном варианте в ее центре. Вследствие этого, выявляются симметричные соотношения. При условии, что ступенька нагружена по центру, что представляет собой регулярный случай, и при условии, что третья несущая зона относительно направления движения ступеньки удалена от первой/второй несущих зон на такие же расстояния, как и центр ступеньки, от первой до третьей несущих зон действуют одинаковые усилия, которые соответствуют нагрузке на ступеньку. В первой и второй несущих зонах указанные усилия действуют в направлении вверх, в то время как усилие в третьей несущей зоне действует в направлении вниз. Благодаря этому, могут быть использованы три идентичных тела качения/поверхности скольжения, которые, вследствие их симметричного нагружения, имеют также, в основном, одинаковый срок службы. В зависимости от того, как сильно конструкция отклоняется от этой симметрии, выявляются, соответственно, другие соотношения сил. В случае необходимости, может быть использовано также различное количество или различные по типу тела качения/поверхности скольжения в отдельных несущих зонах.
Благоприятным является, если в качестве тела качения предусмотрен/предусмотрены один или несколько элементов из группы сфер, роликов, игольчатых роликов и/или бочкообразных роликов. В зависимости от области применения могут использоваться различные тела качения. К примеру, ролики и бочкообразные ролики могут воспринимать сравнительно большие усилия. Расположение бочкообразных роликов может, кроме того, хорошо компенсировать угловые погрешности. Компенсация угловых погрешностей хорошо происходит тогда, когда в качестве тел качения используются сферы. Сферы применимы, в особенности, и тогда, когда поверхности качения осуществлены не горизонтально, а установлены немного наклонно, для улучшения бокового проведения ступеньки. Результирующее усилие прилегания ориентировано в этом случае не вертикально, а именно наклонно. И наконец, игольчатые ролики применимы, в частности, для установочных положений, при которых важна небольшая конструктивная высота.
Благоприятным является, если вспомогательное устройство при посадке включает в себя датчик усилия, который установлен для измерения действующего в несущей зоне усилия прилегания. Таким образом, может быть определена воздействующая на ступеньку нагрузка. К примеру, на основании полученных таким образом данных могут быть сделаны выводы в отношении того, кто или что находится на ступеньке. Если значение усилия, к примеру, превышает 500 Н, то с большой вероятностью можно исходить из того, что на ступеньке находится взрослый человек. Если нагрузка переменна, то, по всей вероятности, на ступеньке находится живое существо (человек или животное), если же она в течение длительного времени статична, то с определенной долей вероятности речь может идти лишь об установленном на ступеньке багаже.
Благоприятным является, если вспомогательное устройство при посадке включает в себя три датчика усилия, которые установлены для измерения действующих во всех трех несущих зонах усилий прилегания. Таким образом, можно рассчитать, с одной стороны, величину (вертикально) воздействующего на ступеньку усилия, а также точку его приложения на ступеньке.
Предпочтительным является, к тому же, если вспомогательное устройство при посадке включает в себя два датчика усилия, которые установлены для измерения действующих в двух несущих зонах усилий прилегания, в частности для измерения действующих в первой несущей зоне и во второй несущей зоне усилий прилегания. Таким образом, может быть рассчитана, с одной стороны, величина (вертикально) воздействующего на ступеньку усилия, а также точка его приложения на ступеньке, поскольку ее координата предполагается или принимается как известная величина. К примеру, расположение указанной точки приложения с большим приближением относительно глубины ступеньки может приниматься в центре ступеньки.
Особо предпочтительным является, кроме того, если вспомогательное устройство при посадке включает в себя ровно один датчик усилия, который установлен для измерения действующего ровно в одной несущей зоне усилия прилегания, в частности для измерения действующего в третьей несущей зоне усилия прилегания. Таким образом, может быть рассчитана величина воздействующего на ступеньку усилия, если точка его приложения предполагается или принимается как известная величина. К примеру, указанная точки приложения с большим приближением может приниматься в центре ступеньки. Если датчик усилия предусматривается в третьей несущей зоне, то знания координаты точки приложения усилия в направлении движения ступеньки достаточно. К примеру, расположение указанной точки приложения с большим приближением относительно глубины ступеньки может приниматься в центре ступеньки. Разумеется, могут быть приняты и другие точки приложения относительно глубины ступеньки, к примеру, ее передняя кромка или же ее задняя кромка.
Предпочтительным является, если предусмотренные в несущей зоне тела качения/поверхности скольжения относительно направления перпендикулярно их поверхности прилегания подвижны относительно друг друга, в частности подпружинены. Таким образом, допуски вспомогательного устройства при посадке могут быть компенсированы в том плане, что тела качения/поверхности скольжения несущей зоны также (все) имеют контакт с поверхностью прилегании или поверхностью ролика, а не «висят в воздухе». Благодаря этому, предотвращается то обстоятельство, что действующее в несущей зоне усилие нежелательным образом воспринимаются лишь частью находящихся в несущей зоне тел качения/поверхностей скольжения, и поэтому они чрезмерно нагружаются. В частности, траектория, вдоль которой могут передвигаться тела качения/поверхности скольжения, проходит в угловой зоне +/-45° от перпендикуляров к указанной поверхности прилегания. В частности, траектория может проходить по дуге или же по прямой (и, в частности, перпендикулярно поверхности прилегания).
Предпочтительным является, однако, также, если предусмотренные в несущей зоне тела качения/поверхности скольжения относительно направления перпендикулярно их поверхности прилегания установлены неподвижно относительно друг друга. Вследствие этого, выявляется простая и мало подверженная сбоям конструкция вспомогательного устройства при посадке.
Благоприятным является, кроме того, если несущие зоны относительно направления перпендикулярно их поверхности прилегания установлены подвижно относительно друг друга, в частности подпружиненно. Таким образом, добиваются, к примеру, того, что ступенька, даже несмотря на допуски, которые ведут к нежелательным отклонениям по высоте несущих зон, может быть ориентирована горизонтально. И здесь траектория, вдоль которой могут передвигаться несущие зоны, может проходить, в частности, в угловой зоне +/-45° от перпендикуляров к указанной поверхности прилегания. В частности, траектория может проходить по дуге или по прямой (и, в частности, перпендикулярно поверхности прилегания).
Благоприятным является, однако, также, если несущие зоны относительно направления перпендикулярно их поверхности прилегания установлены неподвижно относительно друг друга. Вследствие этого, опять же выявляется простая и мало подверженная сбоям конструкция вспомогательного устройства при посадке.
Особо предпочтительным является, кроме того, если, по меньшей мере, одно тело качения/по меньшей мере, одна поверхность скольжения при помощи пружины установлены подпружиненно, и вспомогательное устройство при посадке включает в себя упор, который после задаваемого хода пружины приводится в действие сбоку, по меньшей мере, одного тела качения/по меньшей мере, одной поверхности скольжения и пружины. Посредством этого, нагрузка на тело качения/поверхность скольжения ограничивается усилием, которое определено коэффициентом жесткости пружины и ходом пружины, при котором упор приводится в действие. Зато являющаяся следствием этого нагрузка на тело качения/поверхность скольжения предотвращается, так как она воспринимается вышеуказанным упором. Расположенный «сбоку тела качения/поверхности скольжения и пружины» упор отличается поэтому от того упора, который воздействует на тело качения/поверхность скольжения или на пружинный механизм. При этом предотвращается и дальнейшее подпружинивание тела качения/поверхности скольжения, дополнительно воздействующее усилие переносится, однако, самим телом качения/самой поверхностью скольжения.
Благоприятным является, если датчик усилия установлен для измерения воздействующего, по меньшей мере, на одно тело качения/по меньшей мере, на одну плоскость скольжения, усилия прилегания. При таком варианте осуществления воздействующее, по меньшей мере, на одно тело качения/по меньшей мере, на одну поверхность скольжения, усилие прилегания измеряется напрямую, к примеру, посредством пьезометра. Полученные данные измерения являются поэтому наиболее точными.
Благоприятным является далее, если датчик усилия установлен для измерения деформации пружины и/или для измерения хода пружины. При таком варианте осуществления воздействующее, по меньшей мере, на одно тело качения/по меньшей мере, на одну поверхность скольжения, усилие определяется опосредованно через измерение деформации. При определенных условиях такая система конструктивно более проста в осуществлении, чем прямое измерение указанного усилия. К примеру, датчик усилия может быть осуществлен в виде звукового датчика, который измеряет вышеупомянутую деформацию пружины и/или вышеупомянутый ход пружины. В принципе, использование таких датчиков звука может являться предпочтительным и вне зависимости от признаков пункта 1 формулы изобретения, то есть и при работе со ступенькой, которая установлена посредством более чем трех несущих зон/зон скольжения.
Особо предпочтительным является, если упор приводится в действие посредством допустимого нагружения, по меньшей мере, одного тела качения/по меньшей мере, одной плоскости скольжения. Таким образом, предотвращается то обстоятельство, что, по меньшей мере, одно тело качения/по меньшей мере, одна плоскость скольжения получат повреждения при сильном нагружении, так как воздействующее посредством допустимого нагружения, по меньшей мере, на одно тела качения/по меньшей мере, на одну плоскость скольжения, усилие воспринимается упором.
Особо предпочтительным является далее, если упор приводится в действие в диапазоне измерения датчика усилия. Вследствие этого, диапазон измерения датчика усилия может быть хорошо использован. Для предотвращения повреждений датчика усилия возникающее, вследствие этого, усилие воспринимается упором.
Кроме того, предпочтительным является также, если упор при ненагруженной ступеньке не приводится в действие. Благодаря этому, имеется возможность легкого вдвигания и выдвигания ступеньки, так как в ее направляющей возникает, в основном, лишь трение качения, а обусловленная упором сила трения, однако, предотвращается.
Следующий особо предпочтительный вариант осуществления вспомогательного устройства при посадке имеет место тогда, когда упор приводится в действие при превышающем силу тяжести ступеньки более чем на 100 Н, воздействующем на ступеньку и имеющим одинаковое с силой тяжести направление, усилии. Таким образом, обеспечивается определенный резерв прочности, так что упор, ввиду допусков и старения и, соответственно, просадки, приводится в действие уже при ненагруженной ступеньке, то есть всегда. В предпочтительном варианте упор приводится в действие при превышающем силу тяжести ступеньки более чем на 700 Н, воздействующем на ступеньку и имеющим одинаковое с силой тяжести направление, усилии. Вследствие этого, самый частый случай нагружения среднестатистическим пассажиром весом 70 кг еще выдерживается телами качения/поверхностями скольжения и, соответственно, взрослый среднестатистический пассажир, а также пассажиры и предметы с меньшим весом могут быть надежным образом определены на ступеньке посредством датчиков измерения усилия.
Предпочтительным является далее, если упор на поверхности прилегания или с поверхностью прилегания имеет коэффициент сцеплении μ>0,5 или между ними предусмотрено разъемное соединение с геометрическим замыканием. Вследствие этого, движение ступеньки при (чрезмерной) нагрузке тормозиться, или даже предотвращается. К примеру, таким образом, могут быть предотвращены опасные ситуации. При соответствующем согласовании приводного усилия приводного механизма, коэффициента жесткости пружины, хода пружины до момента приведения в действие упора и коэффициента трения, к примеру, движение ступеньки 2, на которой находится человек, может быть предотвращено лишь посредством того, что приводной механизм слишком слаб для этого. Даже при отказе системы определения возможно находящегося на ступеньке человека, которая регулирует приводной механизм, ступенька не перемещается. Она перемещается лишь тогда, когда она не нагружена или нагружена лишь незначительно. То же самое относится к тому случаю, когда между упором и его поверхностью прилегания в направляющей предусмотрено разъемное соединение с геометрическим замыканием, к примеру, посредством того, что упор и направляющая снабжены зубчатым зацеплением. Высота зубчатого зацепления выбирается при этом в предпочтительном варианте таким образом, что зубчатое зацепление размыкается посредством пружины, когда нагрузка опускается ниже определенного порогового значения.
И, наконец, предпочтительным является, если упор на поверхности прилегания или с поверхностью прилегания имеет коэффициент сцеплении μ<0,5 (предпочтительно μ<0,2). Это благоприятствует движению ступеньки при нагружении. К примеру, при соответствующем согласовании приводного усилия приводного механизма, коэффициента жесткости пружины, хода пружины до момента приведения в действие упора и коэффициента трения ступенька может перемещаться и тогда, когда она нагружена. Таким образом, транспортное средство может продолжать движение даже тогда, когда ступенька нагружена, к примеру, забытым багажом.
Для лучшего понимания изобретение поясняется более детально на основании последующих фигур, на которых представлены:
фиг. 1 - схематично изображенное вспомогательное устройство при посадке;
фиг. 2 - использованный на фиг. 1 сдвигаемый элемент на виде наклоном;
фиг. 3 - сдвигаемый элемент с фиг. 2 на виде сбоку;
фиг. 4 - сдвигаемый элемент с подпружинено установленным телом скольжения;
фиг. 5 - сдвигаемый элемент с подпружиненно установленным и линейно сдвигаемым роликом;
фиг. 6 - расположение, при котором два тела качения расположены на одном коромысле;
фиг. 7 - схематично представленное расположение, при котором несущие зоны установлены лишь в двух направляющих;
фиг. 8 - аналогичная фиг. 7, лишь с несколько другим расположением несущих зон;
фиг. 9 - схематично представленное расположение, при котором несущие зоны установлены лишь в одной направляющей;
фиг. 10 - примерное расположение различных несущих зон для пояснения «блока».
Прежде всего, следует обратить внимание на то, что в различных описанных вариантах осуществления изобретения одинаковые детали снабжаются одинаковыми ссылочными позициями или номерами деталей, причем содержащиеся во всем описании выявления по смыслу могут быть перенесены на одинаковые детали с одинаковыми ссылочными позициями или одинаковыми номерами деталей. Упомянутые в описании данные о расположении, то есть, к примеру, вверху, внизу, сбоку и т.д., также относятся к непосредственно описанной, а также представленной фигуре, и при изменении положения по смыслу также должны быть перенесены на новый вариант расположения. Отдельные признаки или комбинации признаков из представленных и описанных различных примеров осуществления изобретения также могут представлять собой далее самостоятельные решения, обладающие признаками изобретения, или решения в соответствии с изобретением.
Все данные диапазонов значений в настоящем описании следует понимать таким образом, что они включает в себя любые и все поддиапазоны, к примеру, параметры от 1 до 10 следует понимать таким образом, что сюда включены все поддиапазоны, начиная от нижней границы 1 до верхней границы 10, то есть все поддиапазоны начинаются с нижней границы 1 или более и заканчиваются у верхней границы 10 или менее, к примеру, от 1 до 1,7, или от 3,2 до 8,1, или от 5,6 до 10.
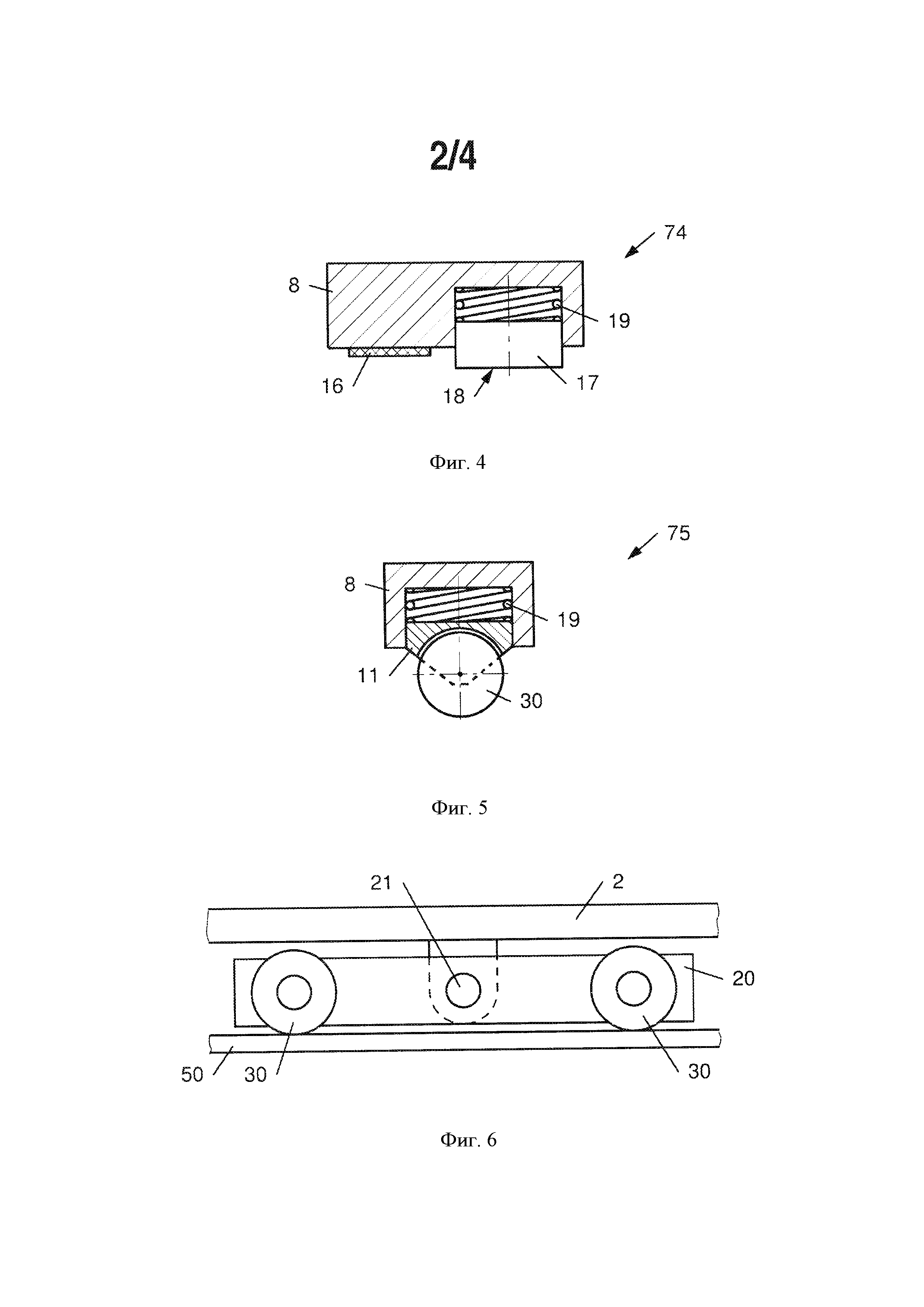
Фиг. 1 демонстрирует вспомогательное устройство 1 при посадке для рельсового транспортного средства или безрельсового транспортного средства, включающее в себя ступеньку 2, которая с возможностью смещения установлена на телах 31…33 качения. Тела 31…33 качения позиционированы в данном примере в расположенных на расстоянии друг от друга несущих зонах 41…43 и перемещаются в обозначенных направляющих 51…53. Вспомогательное устройство 1 при посадке включает в себя далее соединенный со ступенькой 2 приводной механизм 6, который на фиг. 1 обозначен лишь схематично и который установлен для выдвигания и вдвигания ступеньки 2. В представленном на фиг. 1 примере тела 31…33 качения расположены в специальных сдвигаемых элементах 71…73.
Фиг. 2 и 3 детально демонстрируют лишь такой сдвигаемый элемент 70. Точнее фиг. 2 демонстрирует сдвигаемый элемент 70 на виде с наклоном, а фиг. 3 на виду сбоку. Сдвигаемый элемент 70 включает в себя основной корпус 8, на котором посредством винтов 10 закреплены пазовые сухари 9. Посредством этих пазовых сухарей 9 и, соответственно, винтов 10 сдвигаемый элемент 70 может быть закреплен на ступеньке 2. Ролик 30 расположен в держателе 11 для ролика, который посредством пакета 12 пружин и винта 14 смонтирован на основном корпусе 8. Сдвигаемый элемент 70 включает в себя далее регулировочный винт 14, дополнительный датчик 15 измерения усилия и дополнительный упор 16. Таким образом, сдвигаемый элемент 70 и, соответственно, вспомогательное устройство 1 при посадке включают в себя в данном примере тело 30 качения и, соответственно, несущую зону 40, которая за счет пружины 12 установлена подпружинено, а также упор 16, который посредством задаваемого хода пружины 12 приводится в действие сбоку, по меньшей мере, одного тела 30 качения и пружины 12.
Функция вспомогательного устройства 1 при посадке состоит в следующем.
В исходном положении тело 30 качения, которое в данном случае осуществлено в виде ролика, выступает за пределы нижней стороны основного корпуса 8 и упора 16. В исходном положении сдвигаемый элемент 70 и, тем самым, ступенька 2, лежит на телах 30…33 качения и может быть перемещен лишь посредством преодоления трения качения.
За счет наличия пружины 12 нагрузка на тело 30 качения ограничивается усилием, которое определено коэффициентом жесткости пружины 12 и ходом пружины, при котором упор 16 приводится в действие. Зато предотвращается возникающая, вследствие этого, нагрузка на тело 30 качения, так как при возрастающей нагрузке ролик 30 на фиг. 2 и 3 прижимается вверх и, вследствие этого, упор 16 прилегает к расположенной в направляющей 51…53 поверхности качения. Дальнейшая нагрузка, вследствие этого, воспринимается упором 16. Однако с этого момента нагрузка на ролик 30 постоянна. Предпочтительным является, в связи с этим, если упор 16 посредством допустимой нагрузки на тело 30 качения приводится в действие для защиты тела 30 качения от повреждений. Усилие, при котором упор 16 приводится в действие, может быть отрегулировано посредством регулировочного винта 14.
Посредством датчика 15 усилия, который в данном примере осуществлен для измерения хода пружины 12, может быть измерено воздействующее на ролик 30 усилие прилегания. В альтернативном варианте датчик 15 усилия может быть осуществлен также для измерения деформации пружины 12 и может быть реализован, к примеру, при помощи тензорезистора. Но, в принципе, возможно и непосредственное измерение указанного усилия прилегания. К примеру, для этого осуществленный в виде пьезометра датчик 15 усилия может быть расположен в зоне установки ролика 30 в держателе 11 для ролика. При использовании датчика 15 усилия предпочтительным является, если упор 16 приводится в действие в диапазоне измерения датчика 15 усилия, так как, таким образом, диапазон измерения датчика 15 усилия может быть использован благоприятным образом, без риска возникновения повреждений, вследствие чрезмерной нагрузки. Усилие, выходящие за пределы диапазона измерения, воспринимается в этом случае упором 16.
С помощью датчика 15 усилия может быть измерена воздействующая на ступеньку 2 нагрузка. К примеру, на основании полученных таким образом данных можно сделать выводы о том, кто или что находится непосредственно на ступеньке 2. Если значение усилия F превышает, к примеру, 500 Н, то с большой вероятностью можно исходить из того, что на ступеньке 2 находится взрослый человек. Если нагрузка переменная, то, со всей вероятностью, на ступеньке 2 находится живое существо (человек или животное), если же она в течение длительного времени статична, то с определенной долей вероятности речь может идти так же лишь об оставленном на ступеньке багаже.
Вообще, для расположения датчика 15 усилия или нескольких датчиков 15 усилия имеется несколько возможностей. К примеру, все сдвигаемые элементы 71…73 на фиг. 1 могут быть оснащены датчиками 15 усилия, так что действующие во всех трех несущих зонах 41…43 усилия прилегания могут быть измерены. Таким образом, с одной стороны, может быть рассчитано воздействующее на ступеньку 2 усилие F, а также точка его приложения на ступеньке 2.
Возможно также, чтобы вспомогательное устройство 1 при посадке включало в себя лишь два датчика 15 усилия, которые установлены для измерения действующих в двух несущих зонах 41…43 усилий прилегания. Особо предпочтительным является, если первый и второй сдвигаемые элементы 71 и 72 оснащены датчиками 15 усилия и, таким образом, действующие в первой несущей зоне 41 и во второй несущей зоне 42 усилия прилегания могут быть измерены. Таким образом, с одной стороны, может быть рассчитана величина воздействующего на ступеньку 2 усилия F, а также точка его приложения на ступеньке 2, поскольку ее координата предполагается или принимается как известная величина. К примеру, указанная точка приложения с большой вероятностью относительно глубины ступеньки 2 может предполагаться в ее центре.
Возможно, однако, также, чтобы вспомогательное устройство 1 при посадке включало в себя лишь один датчик 15 усилия. Таким образом, величина воздействующего на ступеньку 2 усилия F может быть рассчитана, если его точка приложения предполагается или принимается как известная величина. К примеру, указанная точка приложения с большой вероятностью может предполагаться в центре ступеньки 2. Если датчик 15 усилия предусматривается в третьем сдвигаемом элементе 73, так что действующее в третьей несущей зоне 43 усилие прилегания может быть измерено, то достаточно знать координату точки приложения усилия F в направлении В движения ступеньки 2. К примеру, указанная точка приложения с большой вероятностью относительно глубины ступеньки 2 может предполагаться в ее центре. Разумеется, могут предполагаться и другие точки приложения относительно глубины ступеньки 2, к примеру, ее передняя кромка или же задняя кромка.
Тела 31…33 качения позиционированы в данном примере точно в трех, находящихся на расстоянии друг от друга и расположенных в форме треугольника, несущих зонах 41…43. Вследствие этого, положение ступеньки 2 определено как статичное. Таким образом, оно хорошо предсказуемо на телах 31…33 качения, так как подъем тел 31…33 качения и, соответственно, упоров 16 невозможен, как это может иметь место при использовании направляющей, которая имеет более трех несущих зон 41…43. К тому же, опасность перекашивания сдвигаемых элементов 71…73 в направляющих 51…53 существенно снижена.
В представленном на фиг. 1 примере на каждую несущую зону 41…43 предусмотрено точно по одному телу 31…33 качения, то есть количество тел 31…33 качения равно 3. Возможно, однако, также, чтобы несущая зона 41…43 имела более одного тела 31…33 качения. К примеру, могут быть предусмотрены расположенные рядом друг с другом или друг за другом ролики 31…33. Предпочтительным является при этом, если расстояние между двумя несущими зонами 41…43, по меньшей мере, в пять раз больше их максимальной протяженности. Вследствие этого, положение ступеньки 2 и в этом случае определяется, в основном, как статичное.
При использовании нескольких тел 30…33 качения на несущую зону 40…43 предпочтительным является далее, если предусмотренные в несущей зоне 40…43 тела 30…33 качения по отношению к направлению перпендикулярно к их поверхности прилегания установлены подвижно относительно друг друга, в частности, подпружиненно. Таким образом, допуски вспомогательного устройства 1 при посадке могут быть компенсированы в том отношении, что все тела 30…33 качения несущей зоны 40…43 имеют контакт с поверхностью прилегания и, соответственно, с поверхностью ролика, а «не висят в воздухе». Благодаря этому, предотвращается тот факт, что действующее в несущей зоне 40…43 усилие не будет нежелательным образом воспринято лишь частью находящихся в несущей зоне 40…43 тел 30…33 качения, и поэтому они не будут нагружены сверх меры.
Разумеется, что предусмотренные в несущей зоне 40…43 тела 30…33 качения по отношению к направлению перпендикулярно к их поверхности прилегания могут быть установлены неподвижно относительно друг друга, вследствие чего имеет место простая и мало подверженная сбоям конструкция вспомогательного устройства 1 при посадке.
В представленном на фиг. 1 примере все несущие зоны 41…43 по отношению к направлению перпендикулярно направлению движения ступеньки 2 (см. также двойную стрелку В на фиг. 1) располагаются на расстоянии друг от друга. Таким образом, каждой несущей зоне 41…43 назначена собственная поверхность качения и, соответственно, направляющая 51…53. Гарантия от перекашивания в данном варианте, поэтому особенно велика. На фиг. 1 направляющие 51 и 53, а также 52 и 53, располагаются, к тому же, на одинаковом расстоянии друг от друга. Это, однако, ни в коей мере, не является обязательным условием, направляющие 51 и 53, а также 52 и 53 могли бы располагаться также на различном расстоянии друг от друга.
Первая и вторая несущие зоны 41, 42 располагаются далее в направлении движения ступеньки 2 ближе к ступеньке 2, чем третья несущая зоны 43, причем первая и вторая несущие зоны 41, 42 в направлении движения ступеньки 2 удалены от ступеньки 2 на равное расстояние. Вследствие этого, выявляются в значительной степени симметричные соотношения. При условии, что третья несущая зона 43 по отношению к направлению движения ступеньки 2 удалена от первой/второй несущих зон 41, 42 на равное расстояние, как и точка приложения усилия F, то в первой - третьей несущих зонах 41…43 действуют одинаковые по величине усилия, которые соответствуют нагрузке F на ступеньку 2. В первой и второй несущих зонах 41, 42 вышеуказанные усилия действуют в направлении вверх, в то время как усилие в третьей несущей зоне 43 действует в направлении вниз. Вследствие этого могут быть использованы три идентичных тела 31…33 качения, которые, ввиду своего симметричного нагружения, имеют также, в основном, один и тот же срок службы. Разумеется, эта симметрия для вспомогательного устройства 1 при посадке не является обязательным условием. В неограниченном количестве возможны, разумеется, и другие, отличные от этого, геометрические соотношения.
В представленном примере несущие зоны 40…43 и, соответственно, тела 30…33 качения по отношению к направлению перпендикулярно их поверхности прилегания установлены подвижно относительно друг друга, в данном случае подпружинено. В принципе, однако, возможно также, чтобы несущие зоны 40…43 и, соответственно, тела 30…33 качения по отношению к направлению перпендикулярно их поверхности прилегания были установлены неподвижно относительно друг друга. Вследствие этого, выявляется простая и мало подверженная сбоям конструкция вспомогательного устройства 1 при посадке.
В принципе, тело 30…33 качения может иметь также и другую форму, чем ролик. К примеру, они могут быть осуществлены в форме сферы, игольчатого ролика и/или бочкообразного ролика. К примеру, ролики и бочкообразные ролики могут воспринимать сравнительно большие усилия. Расположение бочкообразных роликов может, кроме того, хорошо компенсировать угловые погрешности. Компенсация угловых погрешностей удается хорошо и тогда, когда в качестве тел качения используются сферы. Сферы применимы, в особенности, и тогда, когда поверхность качения осуществлена не горизонтально, а немного с наклоном, для улучшения бокового проведения ступеньки 2. Результирующее усилие прилегания ориентировано в этом случае не вертикально, а также наклонно. И, наконец, игольчатые ролики применимы, в частности, для монтажа, при котором важна низкая конструктивная высота. В случае необходимости, в отдельных несущих зонах может быть использовано тогда и различное количество или различные по типу тела качения.
Как уже упоминалось ранее, в представленных на фигурах примерах упор 16 при ненагруженной ступеньке 2 не приведен в действие. Благодаря этому, возможно легкое вдвигание и выдвигание ступеньки 2, так как между роликами 30…33 и направляющими 51…53 возникает, в основном, лишь трение качения, а вызываемая упором 16 сила трения предотвращается.
Преимуществом является, если упор 16 приводится в действие при превышающем более чем на 100 Н силу тяжести ступеньки 2, воздействующем на ступеньку 2 и имеющем одинаковое с силой тяжести направление, усилии. Таким образом, предусматривается определенный резерв прочности, так что упор 16, ввиду допусков и старения и, соответственно, просадки, приводится в действие уже при ненагруженной ступеньке 2, то есть всегда. В предпочтительном варианте упор 16 приводится в действие при усилии, превышающем силу тяжести ступеньки 2 более чем на 700 Н. Вследствие этого, самый частый случай нагружения среднестатистическим пассажиром весом 70 кг еще переносится телами 30…33 качения, и соответственно, взрослые среднестатистические пассажиры, а также пассажиры и предметы с меньшим весом могут быть надежно определены с помощью датчиков 15 измерения усилия.
К примеру, между упором 16 и его поверхностью прилегания в направляющей 51…53 может быть предусмотрен коэффициент сцеплении μ>0,5 или разъемное соединение с геометрическим замыканием. Вследствие этого, движение ступеньки 2 при (чрезмерной) нагрузке тормозиться, или даже предотвращается. К примеру, таким образом могут быть предотвращены опасные ситуации. При соответствующем согласовании приводного усилия приводного механизма 6, коэффициента жесткости пружины, хода пружины до момента приведения в действие упора 16 и коэффициента трения, к примеру, движение ступеньки 2, на которой находится человек, может быть предотвращено лишь посредством того, что приводной механизм слишком слаб для этого. Даже при отказе системы определения возможно находящегося на ступеньке человека, которая регулирует приводной механизм, ступенька 2 в этом случае не перемещается, а перемещается только тогда, когда она не нагружена или нагружена лишь незначительно. То же самое относится к тому случаю, когда между упором 16 и его поверхностью прилегания в направляющей 51…53 предусмотрено разъемное соединение с геометрическим замыканием, к примеру, посредством того, что упор 16 и направляющая 51…53 снабжены зубчатым зацеплением. Высота зубчатого зацепления выбирается при этом в предпочтительном варианте таким образом, что зубчатое зацепление размыкается посредством пружины 12, когда нагрузка опускается ниже определенного порогового значения. Разумеется, ступенька 2 может блокироваться и иным способом, к примеру, посредством фиксирующего болта, который предотвращает смещение сдвигаемого элемента 70…73 в направляющей 51…53.
Между упором 16 и его поверхностью прилегания в направляющей 51…53 может быть предусмотрен, однако, к примеру, и коэффициент сцеплении μ<0,5 (предпочтительно μ<0,2). Это благоприятствует движению ступеньки 2 при нагружении. К примеру, при соответствующем согласовании приводного усилия приводного механизма 6, коэффициента жесткости пружины, хода пружины до момента приведения в действие упора и коэффициента трения, ступенька 2 может перемещаться и тогда, когда она нагружена.
Фиг. 4 демонстрирует вариант осуществления сдвигаемого элемента 74, при котором подпружинено установленное тело 17 скольжения поверхностью 18 скольжения расположено в основном корпусе 8. Если усилие, воздействующее на поверхность 18 скольжения возрастает, то тело 17 скольжения против направления действия усилия спиральной пружины 19 заметно вдавливается в основной корпус 8, пока не будет выступать за пределы основного корпуса 8 настолько, насколько выступает упор 16. Начиная с этого момента, любая дальнейшая нагрузка - аналогично представленным на фиг. 1-3 сдвигаемым элементам 70…73 - воспринимается упором 16.
Фиг. 5 демонстрирует вариант осуществления сдвигаемого элемента 75, при котором подпружинено установленный держатель 11 для ролика своим роликом 30 расположен в основном корпусе 8. Благодаря этому, несущие зоны 40…43 в отношении направления перпендикулярно их поверхности прилегания могут быть осуществлены подвижными относительно друг друга. Кроме того, дополнительно или в альтернативном варианте, к тому же, может быть предусмотрено, что предусмотренные в несущей зоне 40…43 тела 30…33 качения в отношении направления перпендикулярно их поверхности прилегания подвижны относительно друг друга. В отличие от представленного на фиг. 2 и 3 варианта, при котором ролик 30 передвигается по дугообразной траектории, ролик 30 в представленном на фиг. 5 варианте установлен с возможностью линейного смещения. Разумеется, и представленный на фиг. 5 вариант осуществления может быть оснащен упором 16.
Выявленная в отношении фиг. 1-3 идея может быть по смыслу перенесена на представленные на фиг. 4 или 5 варианты осуществления, в частности, и в плане применения датчиков усилия и планирования определенных коэффициентов трения или разъемного соединения с геометрическим замыканием для упора 16. Особо предпочтительным является, если коэффициент трения между поверхностью 18 скольжения и ее поверхностью прилегания в направляющей 51…53 меньше, чем коэффициент трения между упором 16 и его поверхностью прилегания в направляющей 51…53, поскольку упор 16 не совсем образует с направляющей 51…53 разъемное соединение с геометрическим замыканием.
Фиг. 6 демонстрирует расположение, при котором два тела 30 качения расположены на одном коромысле 20. Благодаря этому, с одной стороны, нагрузка может быть распределена на несколько тел 30 качения, а, с другой стороны, может быть также гарантировано, что тела 30 качения в любом случае выдерживают эту нагрузку. Через вращающуюся опору или точку 21 опоры коромысла 20 может быть передано, в основном, лишь усилие опоры, однако, не крутящий момент. Точки 21 опоры коромысел 20 при этом - аналогично тому, как это представлено на фиг. 1 для тел 31…33 качения - позиционированы точно в трех, находящихся на расстоянии друг от друга, и расположенных в треугольнике несущих зонах 40…43. Расположение ступеньки 2 при этом лишь тогда, в основном, определено как еще статическое, когда тела 30 качения сами по себе не образуют блок, однако, вышеуказанные точки приложения усилия или точки 21 опоры обладают этим свойством. Изображенный на фиг. 6 пример осуществления представлен в связи с телами 30 качения, разумеется, что представленное коромысло 20 может быть использовано также для элементов 18 скольжения.
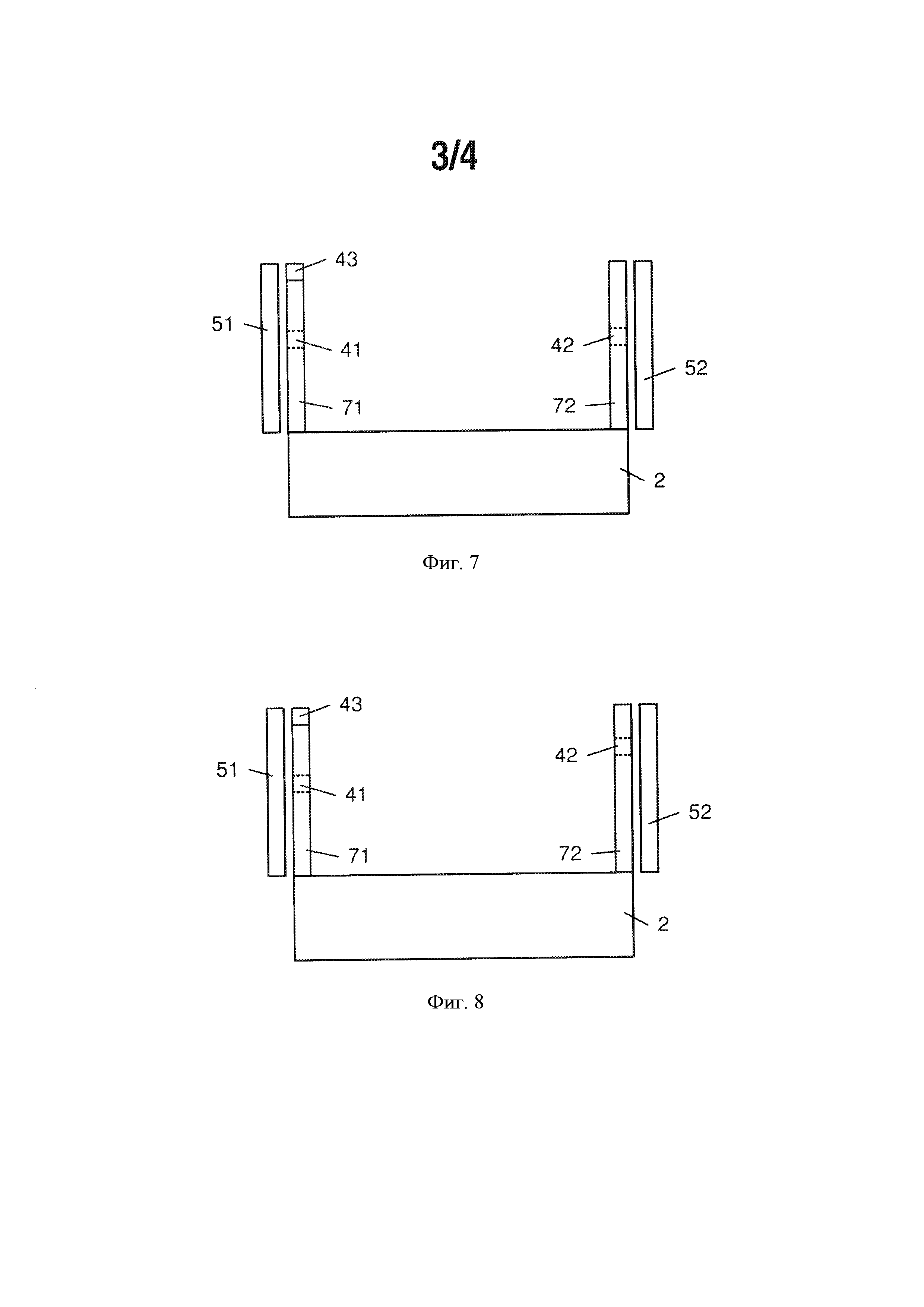
Фиг. 7 демонстрирует схематично представленное и примерное расположение на виде сверху, при котором несущие зоны 41…43 расположены лишь в двух направляющих 51, 52. При этом несущие зоны 41 и 43 расположены в левом сдвигаемом элементе 71, который установлен в левой направляющей 51, а несущая зона 42 расположена в правом сдвигаемом элементе 72, который установлен в правой направляющей 52. (В этом месте следует отметить, что направляющие 51 и 52 для лучшей наглядности смещены в сторону и отмечены рядом с несущими зонами 41…43. В результате несущие зоны 41…43 проведены, естественно, в направляющих 51 и 52). Несущие зоны 41 и 42 расположены на нижней стороне, а несущая зона 43 на верхней стороне сдвигаемых элементов 71, 72.
Фиг. 8 демонстрирует расположение, очень похожее на расположение с фиг. 7. В отличие от него, несущая зона 42 смещена, однако, немного назад и находится по отношению к направлению смещения в центре обеих несущих зон 41 и 43.
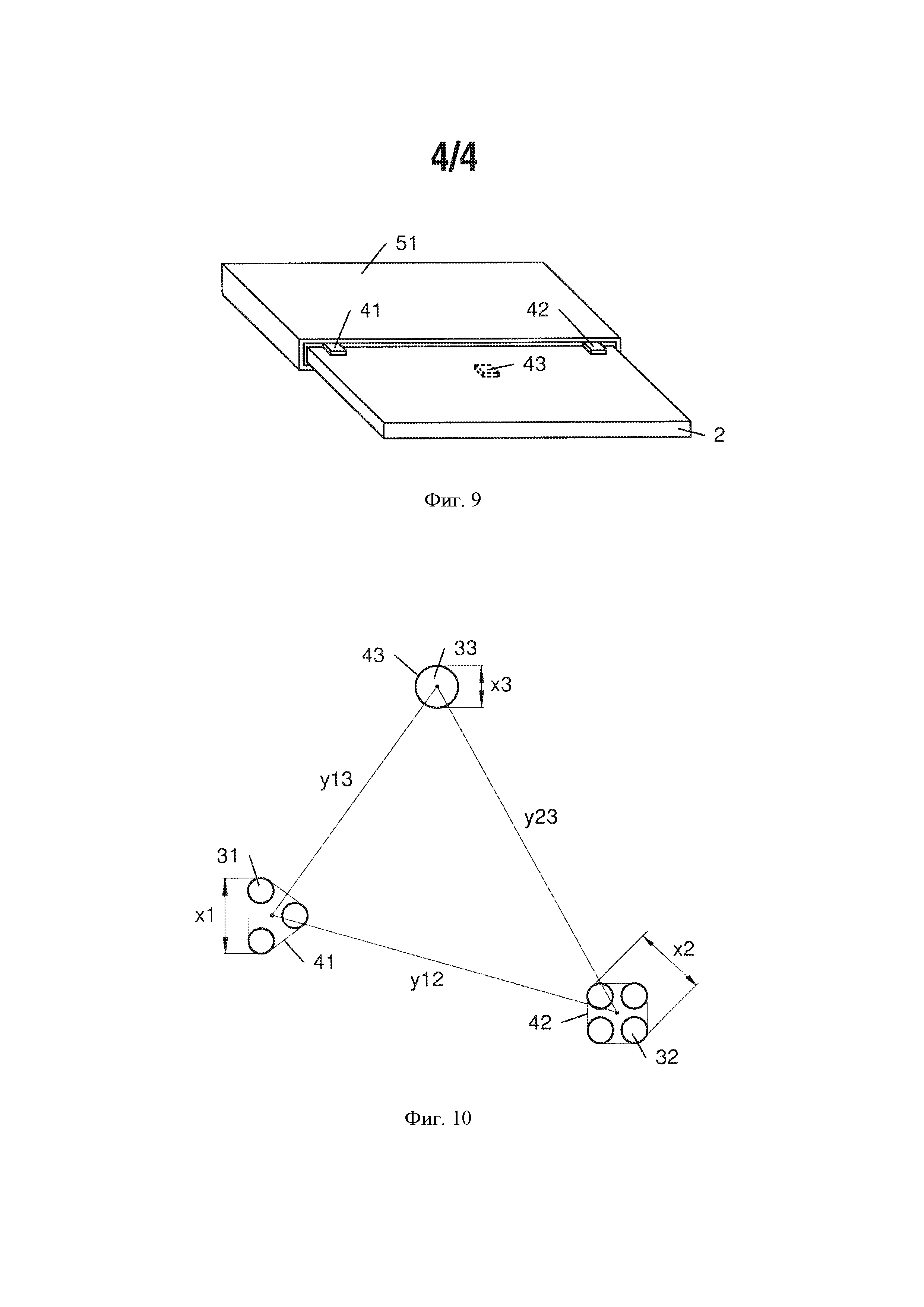
Фиг. 9 демонстрирует схематично представленное и примерное расположение на виде сверху, при котором несущие зоны 41…43 установлены лишь в одной направляющей 51. Несущие зоны 41…43 расположены при этом, к примеру, непосредственно на ступеньке 2, которая осуществлена более глубокой, чего, в сущности, требовала бы поверхность ступеньки. Задняя часть ступеньки 2 с несущими зонами 41…43 проведена при этом в коробчатой направляющей 51. На фиг. 9 ступенька для лучшей наглядности изображена полностью выдвинутой из направляющей 51. В реальности, она выдвигается максимально до несущей зоны 43. Сама ступенька 2 может быть изготовлена, к примеру, по типу сэндвич-конструкции, так что может быть достигнута достаточная стабильность при небольшом весе.
На фиг. 9 ступенька 2 проведена внутри направляющей 51. Естественно, возможно также, чтобы направляющая 51 была проведена внутри ступеньки 2. На фиг. 9, в соответствии с этим, и направляющая 51 может быть использована в качестве ступеньки 2, а также наоборот. В частности, к тому же, несущие зоны 41…43 могут быть расположены на внутренней стороне, ставшей ступенькой 2 направляющей 51. Это относится также к другим представленным вариантам, в которых несущие зоны 41…43 также могут быть неподвижно установлены на вагоне.
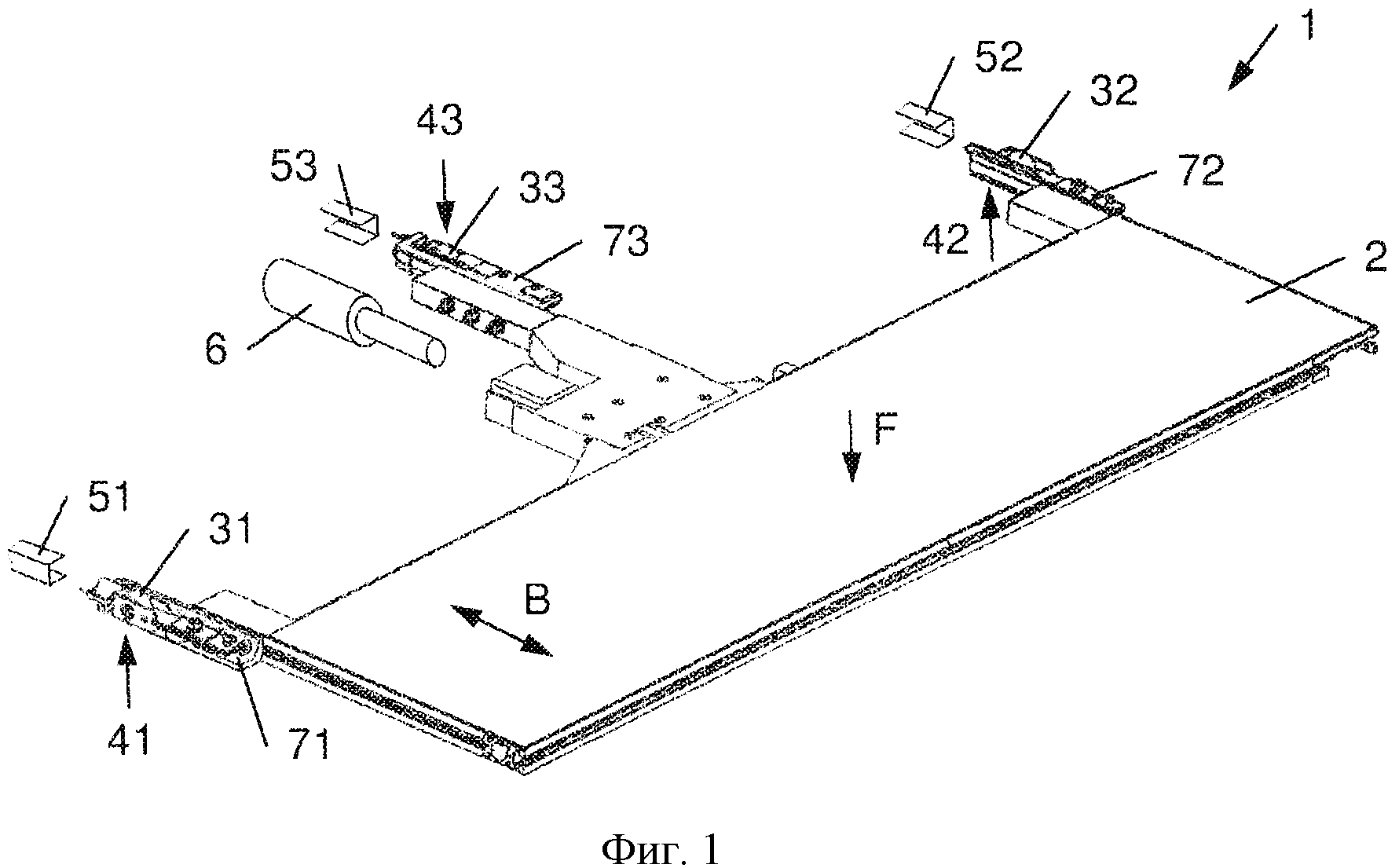
И, наконец, фиг. 10 демонстрирует примерное расположение различных несущих зон 41…43 в треугольнике, причем несущая зона 41 имеет три расположенных в треугольнике тела 31 качения, а несущая зона 42 четыре расположенных в четырехугольнике тела 32 качения. В несущей зоне 33 (примечание переводчика: нужно 43) расположено единственное, несколько большее тело 43 (примечание переводчика: нужно 33) качения. Поэтому несущая зона 33 (примечание переводчика: нужно 43) конгруэнтна телу 33 качения.
Наибольшая протяженность несущей зоны 41 определена боковой длиной x1 треугольника, протяжность несущей зоны 42 диагональю х2, а протяженность несущей зоны 43 диаметром х3. В данном примере несущая зона 41 имеет наибольшую протяженность, то есть x1>х2, х3. В предпочтительном варианте расстояния y12, y13 и y23 между несущими зонами 41…43, по меньшей мере, в пять раз больше их максимальной протяженности. Это означает в конкретном примере, что y12, y13, y23≥5⋅x1.
В данном примере все расстояния y12, y13 и y23 больше, чем 5⋅x1. Притом это является особенно предпочтительным, правда, возможно также, чтобы расстояния y12, y13 и y23 в предпочтительном варианте равнялись, соответственно, по меньшей мере, пятикратной максимальной протяженности граничащих несущих зон 41…43. Конкретно это означает, что y12≥5⋅МАХ(х1, х2), y13≥5⋅МАХ(х1, х3) и y23≥5⋅МАХ(х2, х3).
На фиг. 10 расстояния y12, y13 и y23 соотнесены с центрами тяжести (поверхностей) несущих зон 41…43. Возможно, к примеру, однако, также, чтобы расстояние между двумя несущими зонами 41…43 было определено диаметром того самого малого круга, который сопрягается именно между двумя несущими зонами 41…43.
Когда вышеуказанные условия соблюдены, то расположение определяется как статически особенно благоприятное и тенденция к заклиниванию незначительна. Тела 31…33 качения разделены при этом на явно разграниченные «блоки». Выявленная идея может быть применена, к тому же, в равной мере, и к точкам 21 опоры коромысел 20.
Примеры осуществления демонстрируют возможные варианты осуществления вспомогательного устройства 1 при посадке в соответствии с изобретением и, соответственно, сдвигаемого элемента 70…75 в соответствии с изобретением, причем здесь следует отметить, что изобретение не ограничено специально представленными вариантами осуществления, а, напротив, возможны различные комбинации отдельных вариантов осуществления, и эта возможность комбинирования, вследствие идеи в отношении технических мероприятий посредством настоящего изобретения, лежит в сфере компетенции специалиста, работающего в этой технической области. Таким образом, и все возможные варианты осуществления, вследствие комбинаций отдельных элементов представленного и описанного варианта осуществления, включаются в объем правовой охраны данного изобретения.
В частности, констатируется, что представленное вспомогательное устройство 1 при посадке и, соответственно, представленный сдвигаемый элемент 70…75 в реальности могут включать в себя большее или меньшее количество компонентов, чем изображено. В частности, ступенька 2 может быть расположена иначе, чем представлено на фигурах, также на фиксированных (то есть не подпружинено установленных) телах 30…33 качения и/или поверхностях 18 скольжения. Упор 16 может в данном случае отсутствовать. Далее возможны смешанные формы представленных вариантов осуществления. Так, для установки ступеньки 2 могут быть использованы, к примеру, тело 30…33 качения и элемент 17 скольжения в сочетании друг с другом. То же самое относится к коромыслам 20. Кроме того, подпружинено установленные тела 30…33 качения или элементы 17 скольжения могут быть использованы совместно с фиксировано установленными телами 30…33 качения или элементами 17 скольжения.
Для порядка, в заключение следует обратить внимание на то, что вспомогательное устройство 1 при посадке и сдвигаемый элемент 70…75, а также их компоненты для лучшего понимания конструкции были представлены частично не в масштабе, и/или в увеличенном виде, и/или в уменьшенном виде.
Задача, лежащая в основе независимых изобретательских решений, может быть заимствована из описания.

Оконное стекло для транспортного средства и способ монтажа оконного стекла на транспортном средстве
Поворотная раздвижная дверь
Поворотный модуль раздвижной двери для рельсового транспортного средства с улучшенной блокировкой выше мёртвой точки
Способ управления магниторельсовым тормозным устройством рельсового транспортного средства
Устройство корпуса для магнитопровода для электромагнитного или с постоянным электромагнитом рельсового тормоза для рельсового транспортного средства и электромагнитный или с постоянным электромагнитом рельсовый тормоз для рельсового транспортного средства
Модуль поворотно-раздвижной двери для рельсового транспортного средства
Модуль раздвижной двери/поворотно-раздвижной двери с консольным креплением зубчатой рейки реечного привода
Способ и устройство контролирования, по меньшей мере, одного электронного коммутационного контакта транспортного средства
Дверная створка для транспортного средства, в частности для рельсового транспортного средства
Дверное полотно для транспортного средства, в частности для рельсового транспортного средства

