Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ПРЕИМУЩЕСТВЕННО ОТНОСИТЕЛЬНО КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области навигации и может быть использовано для определения положения объектов с подвижными частями относительно базовой системы координат, в том числе для определения положения космонавтов относительно космического аппарата (КА) в условиях космического полета.
Известен способ определения координат положения подвижного объекта в закрытых помещениях с использованием электронных идентификаторов и считывателей (патент РФ 2465743, приоритет от 19.09.2011, МПК H04W 40/20 (2009.01), G01S 5/14 (2006.01), согласно которому считыватель закрепляют на подвижном объекте, а электронные идентификаторы закрепляют на элементах конструкции помещения, при приближении к электронному идентификатору подвижного объекта его считывателем считывают код электронного идентификатора и вместе с кодом подвижного объекта передают через радиомодем на радиомодем электронно-вычислительной машины (ЭВМ), в которой определяют координаты подвижного объекта, при этом положение электронных идентификаторов определяется сеткой с постоянным шагом, нанесенной на план помещения. Реализующая данный способ система определения координат положения подвижного объекта в закрытых помещениях, содержит радиочастотные идентификаторы, считыватель, передающий и приемные радиомодемы, ЭВМ.
Данные способ и реализующая его система обеспечивают определение координат подвижных объектов в закрытых помещениях путем полной развязки по частоте между радиочастотными идентификаторами и радиомодемами.
К недостаткам данных способа и системы относится то, что при их использовании точность определения координат ограничена размером ячейки сетки размещения идентификаторов.
Известен способ измерения координат объекта (патент РФ 2401436, приоритет от 24.03.2008, МПК (2006.01): G01S 11/00 - прототип способа), заключающийся в регистрации изображений объекта посредством двух оптико-локационных блоков, программной обработке оцифрованных изображений, снимаемых с фотоматриц для определения координат изображений идентичной точки на объекте, вычислении матриц, описывающих положения оптических осей оптико-локационных блоков по сигналам с датчиков углов поворота внешней и внутренней рам кардановых подвесов и вычислении координат идентичной точки объекта в связанной системе координат.
В качестве системы-прототипа выбрана система, реализующая способ-прототип (патент РФ 2401436, приоритет от 24.03.2008, МПК (2006.01): G01S 11/00), содержащая два разнесенных оптико-локационных блока, каждый из которых установлен на внутренней раме своего карданова подвеса, который предназначен для обеспечения необходимой ориентации оптической оси оптико-локационного блока и содержит внешнюю и внутреннюю рамы, на осях которых установлены датчики угла поворота рам подвеса, цифровой вычислитель, включающий в себя модули вычисления матрицы, модуль программной обработки изображений и модуль вычисления координат объекта, определенным образом соединенные между собой.
Данные способ и система позволяют расширить область пространства, в которой возможно измерение координат подвижных объектов.
Недостатком способа и системы-прототипов является необходимость разработки сложного программного обеспечения обработки изображений, а также необходимость установки оптических блоков на подвижных подвесах, что усложняет работу, снижает надежность и увеличивает ограничения, в том числе массово-габаритные, по их использованию.
Задачей, на решение которой направлено настоящее изобретение, является повышение точности определения положения объекта с подвижными частями относительно базовой системы координат, например, космонавта относительно КА в условиях космического полета.
Технический результат, достигаемый при осуществлении настоящего изобретения, заключается в обеспечении оперативного высокоточного определения положения объекта с подвижными частями, например, космонавта как в воздушном пространстве - внутри герметичного отсека КА, так и в условиях вакуума - в открытом космическом пространстве снаружи КА.
Технический результат достигается тем, что в способе определения положения объекта преимущественно относительно КА, включающем регистрацию в оптическом диапазоне сигналов, характеризующих местоположение объекта, обработку полученных данных с учетом параметров оптических систем и вычисление координат точек объекта в базовой системе координат, дополнительно определяют параметры относительного положения местоположений излучателей инфракрасных импульсных сигналов при не менее, чем одном заданном фиксированном положении подвижных частей объекта с размещенными на упомянутых подвижных частях по не менее, чем одному излучателю инфракрасных импульсных сигналов, далее в процессе определения положения объекта осуществляют формирование управляющих воздействий на упомянутые излучатели инфракрасных импульсных сигналов, осуществляют измерение параметров, генерируемых не менее, чем четырьмя снабженными оптическими системами и размещенными в разнесенных точках, фиксированных в базовой системе координат, относительно которой определяют положение объекта, позиционно-чувствительными детекторами инфракрасного излучения, по измеренным значениям параметров, генерируемых позиционно-чувствительными детекторами инфракрасного излучения, и заданным значениям параметров расположения детекторов и оптических систем определяют значения координат местоположений излучателей инфракрасных импульсных сигналов в базовой системе координат, а параметры текущего положения объекта относительно базовой системы координат определяют по текущим значениям координат местоположений излучателей инфракрасных импульсных сигналов и параметрам относительного положения местоположений излучателей инфракрасных импульсных сигналов, определенным при заданных фиксированных положениях объекта.
Технический результат достигается также тем, что определение параметров относительного положения местоположений излучателей инфракрасных импульсных сигналов при заданном фиксированном положении подвижных частей объекта выполняют путем осуществления формирования управляющих воздействий на упомянутые излучатели инфракрасных импульсных сигналов и измерения параметров, генерируемых упомянутыми позиционно-чувствительными детекторами инфракрасного излучения, по измеренным значениям параметров, генерируемых позиционно-чувствительными детекторами инфракрасного излучения, и заданным значениям параметров расположения детекторов и параметров оптических систем определяют значения координат местоположений излучателей инфракрасных импульсных сигналов в базовой системе координат, по которым определяют параметры относительного положения местоположений излучателей инфракрасных импульсных сигналов.
Технический результат достигается также тем, что система определения положения объекта преимущественно относительно КА, включающая две оптические системы, блок задания параметров оптических систем и блок определения параметров положения объекта, дополнительно включает не менее двух блоков излучателей инфракрасных импульсных сигналов, размещенных на разных подвижных частях объекта, не менее двух радиоприемных устройств, не менее двух средств сопряжения радиоустройств с блоками излучателей инфракрасных сигналов, не менее четырех блоков позиционно-чувствительных детекторов инфракрасного излучения, размещенных в разнесенных точках, фиксированных в базовой системе координат, относительно которой определяют положение объекта, не менее двух оптических систем, не менее четырех блоков формирования данных приема инфракрасных сигналов, не менее четырех средств сопряжения радиоустройств с блоками формирования данных приема инфракрасных сигналов, не менее пяти радиоприемо-передающих устройств, блок формирования команд управления излучением и приемом инфракрасных сигналов, средство сопряжения аппаратуры с пятым радиоприемо-передающим устройством, синхронизатор, блок задания параметров расположения детекторов инфракрасного излучения, блок определения параметров направлений от детекторов инфракрасного излучения на излучатели инфракрасных сигналов, блок определения координат местоположений излучателей инфракрасных сигналов, блок индикации фиксированных положений объекта, блок определения параметров относительного положения излучателей инфракрасных сигналов при фиксированных положениях объекта, при этом вход каждого i-го блока излучателя инфракрасных импульсных сигналов и выход каждого i-го радиоприемного устройства, где i=1, 2, 3, соединены, соответственно, с выходом и входом i-го средства сопряжения радиоустройства с блоком излучателя инфракрасных сигналов, причем первые вход и выход и вторые вход и выход каждого i-го, i=1÷4, средства сопряжения радиоустройства с блоком формирования данных приема инфракрасных сигналов соединены с, соответственно, выходом и входом i-го радиоприемо-передающего устройства и выходом и входом i-го блока формирования данных приема инфракрасных сигналов, второй вход которого соединен с выходом i-го блока позиционно-чувствительного детектора инфракрасного излучения, на котором установлена i-ая оптическая система, при этом первые выход и вход и вторые выход и вход средства сопряжения аппаратуры с пятым радиоприемо-передающим устройством соединены, соответственно, с входом и выходом пятого радиоприемо-передающего устройства, входом блока определения координат местоположений излучателей инфракрасных сигналов и выходом блока формирования команд управления излучением и приемом инфракрасных сигналов, вход которого соединен с выходом синхронизатора, выход которого также соединен со вторым входом блока определения координат местоположений излучателей инфракрасных сигналов, третий вход которого соединен с выходом блока определения параметров направлений от детекторов инфракрасного излучения на излучатели инфракрасных сигналов, первый, второй и третий входы которого соединены с, соответственно, выходом блока задания параметров оптических систем, выходом блока задания параметров расположения детекторов инфракрасного излучения и третьим выходом средства сопряжения аппаратуры с пятым радиоприемо-передающим устройством, причем выход блока определения координат местоположений излучателей инфракрасных сигналов соединен с входами блока определения параметров положения объекта и блока определения параметров относительного положения излучателей инфракрасных сигналов при фиксированных положениях объекта, второй вход и выход которого соединены, соответственно, с выходом блока индикации фиксированных положений объекта и вторым входом блока определения параметров положения объекта.
Изобретение поясняется фиг. 1, 2, 3.
На фиг. 1 представлена блок-схема системы, реализующей предлагаемый способ, и введены следующие обозначения:
1 - объект с подвижными частями;
2i, i=1, 2, 3 - первый, второй и третий блоки излучателей инфракрасных импульсных сигналов (БИИИС);
3i, i=1, 2, 3 - первое, второе и третье радиоприемные устройства (РПУ);
4i, i=1, 2, 3 - первое, второе и третье средства сопряжения радиоустройств с блоками излучателей инфракрасных сигналов (ССРБИИС);
5i, i=1÷4 - с первого по четвертый блоки позиционно-чувствительных детекторов инфракрасного излучения (БПЧДИИ);
6i, i=1÷4 - с первой по четвертую оптические системы (ОС);
7i, i=1÷4 - с первого по четвертый блоки формирования данных приема инфракрасных сигналов (БФДПИС);
8i, i=1÷4 - с первого по четвертое средства сопряжения радиоустройств с блоками формирования данных приема инфракрасных сигналов (ССРБФДПИС);
9i, i=1÷4, 10 - с первого по пятое радиоприемо-передающие устройства (РППУ);
11 - блок формирования команд управления излучением и приемом инфракрасных сигналов (БФКУИПИС);
12 - средство сопряжения аппаратуры с пятым радиоприемо-передающим устройством (ССАПРППУ);
13 - синхронизатор;
14 - блок задания параметров оптических систем (БЗПОС);
15 - блок задания параметров расположения детекторов инфракрасного излучения (БЗПРДИИ);
16 - блок определения параметров направлений от детекторов инфракрасного излучения на излучатели инфракрасных сигналов (БОПНДИИИИС);
17 - блок определения координат местоположений излучателей инфракрасных сигналов (БОКМИИС);
18 - блок индикации фиксированных положений объекта (БИФПО);
19 - блок определения параметров относительного положения излучателей инфракрасных сигналов при фиксированных положениях объекта (БОПОПИИСФПО);
20 - блок определения параметров положения объекта (БОППО).
На фиг. 2 представлен пример циклограммы работы излучателей, детекторов, формирования и передачи данных и введены следующие обозначения:
tи - длительность инфракрасного импульсного сигнала;
tпп - длительность приема-передачи пакета данных по радиоканалу;
tпр - длительность времени прогрева детектора;
tизм - длительность времени измерения инфракрасного импульсного сигнала детектором;
tпз - длительность паузы между окончанием измерения инфракрасного импульсного сигнала детектором и началом передачи данных;
Тц - длительность цикла.
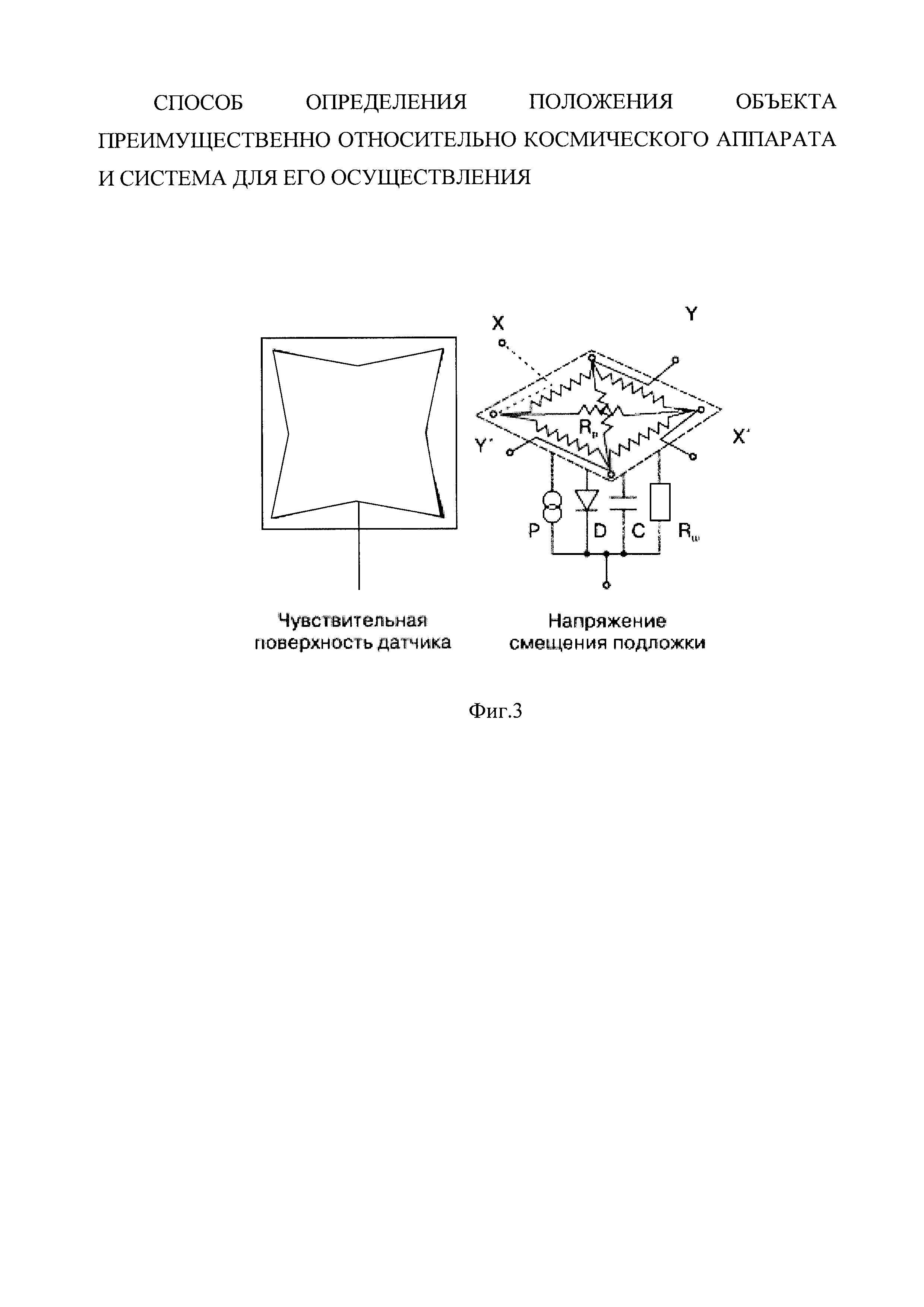
На фиг. 3 представлен пример схемы двухмерного позиционно-чувствительного детектора с четырехсторонним расположением электродов и обозначено:
X, X′, Y, Y′ - выводы детектора.
В предлагаемом способе на первом этапе осуществляется определение параметров относительного положения местоположений излучателей инфракрасных импульсных сигналов при не менее, чем одном заданном фиксированном положении подвижных частей объекта с размещенными на упомянутых подвижных частях по не менее, чем одному излучателю инфракрасных импульсных сигналов. Данное определение может быть выполнено как непосредственным измерением - например, измерением расстояний между излучателями инфракрасных сигналов с помощью измерителей расстояний (например, рулетки и т.д.), так и другим возможным способом - например, как представлено в предлагаемой системе, посредством излучения и регистрации инфракрасных импульсных сигналов и последующей обработки полученных данных.
Предлагаемая система реализует следующие действия: осуществляют формирование управляющих воздействий на излучатели инфракрасных импульсных сигналов при не менее, чем одном заданном фиксированном положении подвижных частей объекта с размещенными на упомянутых подвижных частях по не менее чем одному излучателю инфракрасных импульсных сигналов, осуществляют измерение параметров, генерируемых не менее чем четырьмя снабженными оптическими системами и размещенными в разнесенных точках, фиксированных в базовой системе координат, относительно которой определяют положение объекта, позиционно-чувствительными детекторами инфракрасного излучения, по измеренным значениям параметров, генерируемых позиционно-чувствительными детекторами инфракрасного излучения, и заданным значениям параметров расположения детекторов и оптических систем определяют значения координат местоположений излучателей инфракрасных импульсных сигналов в базовой системе координат, по которым определяют параметры относительного положения местоположений излучателей инфракрасных импульсных сигналов, далее в процессе определения положения объекта повторяют указанные действия при текущем положении объекта, начиная с формирования управляющих воздействий на излучатели инфракрасных импульсных сигналов, а параметры текущего положения объекта относительно базовой системы координат определяют по текущим значениям координат местоположений излучателей инфракрасных импульсных сигналов и параметрам относительного положения местоположений излучателей инфракрасных импульсных сигналов, определенным при заданных фиксированных положениях объекта, при этом управление и синхронизацию моментов излучения, приема и передачи данных по результатам приема инфракрасных импульсных сигналов осуществляют по радиоканалу.
Представленная на фиг. 1 система определения положения объекта относительно КА содержит три блока излучателей инфракрасных импульсных сигналов (БИИИС) 2i, i=1, 2, 3, три радиоприемных устройства (РПУ) 3i, i=1, 2, 3, три средства сопряжения радиоустройств с блоками излучателей инфракрасных сигналов (ССРБИИС) 4i, i=1, 2, 3, четыре блока позиционно-чувствительных детекторов инфракрасного излучения (БПЧДИИ) 5i, i=1÷4, четыре оптических системы (ОС) 6i, i=1÷4, четыре блока формирования данных приема инфракрасных сигналов (БФДПИС) 7i, i=1÷4, четыре средства сопряжения радиоустройств с блоками формирования данных приема инфракрасных сигналов (ССРБФДПИС) 8i, i=1÷4, семь радиоприемо-передающих устройств (РППУ) 9i, i=1÷4, 10, 25, 27, блок формирования команд управления излучением и приемом инфракрасных сигналов (БФКУИПИС) 11, средство сопряжения аппаратуры с пятым радиоприемо-передающим устройством (ССАПРППУ) 12, синхронизатор 13, блок задания параметров оптических систем (БЗПОС) 14, блок задания параметров расположения детекторов инфракрасного излучения (БЗПРДИИ) 15, блок определения параметров направлений от детекторов инфракрасного излучения на излучатели инфракрасных сигналов (БОПНДИИИИС) 16, блок определения координат местоположений излучателей инфракрасных сигналов (БОКМИИС) 17, блок индикации фиксированных положений объекта (БИФПК) 18, блок определения параметров относительного положения излучателей инфракрасных сигналов при фиксированных положениях объекта (БОПОПИИСФПК) 19, блок определения параметров положения объекта (БОППК) 20.
Каждый i-й, i=1, 2, 3 комплект блоков БИИИС 2i, РПУ 3i и ССРБИИС 4i размещен на одной из подвижных частях объекта по не менее, чем одному комплекту на подвижной части. Например, при определении положения космонавта один комплект данных блоков может быть размещен на туловище, а другой (другие) - на руке и/или ноге.
Каждый i-й, i=1÷4 комплект БПЧДИИ 5i, ОС 6i, БФДПИС 7i, ССРБФДПИС 8i, и РППУ 9i размещен в одной из разнесенных точках, фиксированных в базовой системе координат, относительно которой определяют положение объекта - например, в разнесенных точках КА.
Вход каждого i-го БИИИС 2i и выход каждого i-го РПУ 3i, где i=1, 2, 3, соединены, соответственно, с выходом и входом i-го ССРБИИС 4i.
Первые вход и выход и вторые вход и выход каждого i-го, i=1÷4 ССРБФДПИС 8i соединены, соответственно, с выходом и входом i-го РППУ 9i и выходом и входом i-го БФДПИС 7i, второй вход которого соединен с выходом i-го БПЧДИИ 5i, на котором установлена i-я ОС 6i.
Первые выход и вход и вторые выход и вход ССАПРППУ 12 соединены с, соответственно, входом и выходом пятого РППУ 10, входом БОКМИИС 17 и выходом БФКУИПИС 11. Выход синхронизатора 13 соединен с входом БФКУИПИС 11 и вторым входом БОКМИИС 17.
Третий вход БОКМИИС 17 соединен с выходом БОПНДИИИИС 16.
Первый, второй и третий входы БОПНДИИИИС 16 соединены с, соответственно, выходом БЗПОС 14, выходом БЗПРДИИ 15, третьим выходом ССАПРППУ 12.
Выход БОКМИИС 17 соединен с входами БОППО 20 и БОПОПИИСФПО 19. Второй вход и выход БОПОПИИСФПО 19 соединены с, соответственно, выходом БИФПО 18 и вторым входом БОППО 20.
Средства сопряжения ССРБИИС 4, ССРБФДПИС 8, ССАПРППУ 12 могут быть выполнены в виде контроллеров (процессоров).
Работа системы осуществляется следующим образом.
Синхронизатор 13 выдает синхронизирующие сигналы на БФКУИПИС 11 и БОКМИИС 17.
БФКУИПИС 11 в соответствии с поступающими на него синхронизирующими сигналами формирует команды управления блоками БИИИС 2 и БФДПИС 7.
Команды управления от БФКУИПИС 11 на БИИИС 2 поступают через ССАПРППУ 12, РППУ 10, РПУ 3, ССРБИИС 4.
Команды управления от БФКУИПИС 11 на БФДПИС 7 поступают через ССАПРППУ 12, РППУ 10, РППУ 9, ССРБФДПИС 8.
В соответствии с поступившими командами управления БИИИС 2 излучают инфракрасные импульсные сигналы. Инфракрасное излучение данных сигналов через ОС 6 поступает на БПЧДИИ 5. БПЧДИИ 5 генерируют значения выходных параметров, соответствующие поступающему на детекторы инфракрасному излучению, и передают свои выходные данные в БФДПИС 7.
В соответствии с поступившими командами управления БФДПИС 7 принимают в задаваемые командами управления моменты времени данные от БПЧДИИ 5, формируют по ним данные со значениями координат центров световых пятен и амплитуд сигналов детекторов с указанием соответствующих номеров детекторов и в задаваемые командами управления моменты времени выдают сформированные данные на передачу через ССРБФДПИС 8, РППУ 9, РППУ 10, ССАПРППУ 12 в блоки БОПНДИИИИС 16 и БОКМИИС 17 (координаты центров световых пятен передаются в БОПНДИИИИС 16, амплитуда сигнала передается в БОКМИИС 17).
Для экономии ресурса электропитания детекторов БФДПИС 7 может выдавать управляющие команды на БПЧДИИ 5, обеспечивающие работу детекторов только в необходимые интервалы, синхронизированные с моментами излучения инфракрасных импульсных сигналов. Передача таких команд на фиг. 1 обозначена пунктирными стрелками.
На фиг. 2 представлен пример циклограммы работы излучателей, детекторов, формирования и передачи данных, в которой использованы следующие значения величин: tи=0,6 мс; tпп=10 мс; tпр=100 мс; tизм=10 мс; tпз=0…80 мс; Тц=6…60 с.
Значение tпз зависит от номера БПЧДИИ и вычисляется по формуле tпзi=(i-1)*tпп.
Представленная циклограмма обеспечивает возможность по времени приема-передачи по радиоканалу каждого пакета данных определить как номер детектора, данные с которого содержатся в принятом по радиоканалу пакете, так и номер излучателя, инфракрасный импульсный сигнал от которого был принят данным детектором.
БИИИС 2 могут быть выполнены, например, следующим образом. В каждом БИИИС 2 может быть установлено не менее четырех ИК-светодиодов с диаграммой направленности светодиода 90 градусов по половинному уровню излучаемой мощности (уровень 0,5). Светодиоды могут быть установлены на гранях усеченной пирамиды, что обеспечивает суммарную диаграмму направленности не менее 180 градусов по уровню 0,5.
Каждая ОС 6 может быть выполнена в виде малогабаритного объектива с фиксированным фокусным расстоянием, работающего в инфракрасном диапазоне.
БПЧДИИ 5 могут быть выполнены, например, следующим образом. Каждый БПЧДИИ 5 может содержать двухмерный позиционно-чувствительный детектор (датчик) с четырехсторонним расположением электродов и компенсацией нелинейности. На фиг. 3 представлен пример схемы такого детектора. Выводы X, X′, Y, Y′ детектора подаются на четыре схемы измерения тока, которые соответственно измеряют токи Ix, Ix′, Iy, Iy′. Координаты x и y центра светового пятна относительно осей координат, привязанных к детектору, вычисляются по формулам (1) и (2), при этом точка с координатами x=0 и y=0 соответствует центру детектора (L - размер стороны детектора):

Амплитуда сигнала детектора вычисляется по формуле

и характеризует интенсивность регистрируемого детектором инфракрасного излучения.
В БОПНДИИИИС 16 по координатам центров световых пятен, параметрам оптических систем от БЗПОС 14 и параметрам расположения детекторов от БЗПРДИИ 15 определяются параметры направлений от детекторов инфракрасного излучения на излучатели инфракрасных сигналов и выходные данные выдаются в БОКМИИС 17. Например, по координатам светового пятна с учетом параметров установленной на детекторе оптической системы, рассчитывается вектор направления луча, направленного от детектора на излучатель, в системе координат детектора, после чего данный вектор переводится в базовую систему координат (систему координат КА) с учетом параметров расположения детектора относительно базовой системы координат.
В БОКМИИС 17 в соответствии с синхронизирующими сигналами от синхронизатора 13 по амплитудам сигналов детекторов и параметрам направлений от детекторов на излучатели определяются координаты местоположений излучателей и передаются в блоки БОППО 20 и БОПОПИИСФПО 19. Например, координаты местоположений i-го излучателя инфракрасных импульсных сигналов рассчитываются как координаты точки, минимально удаленной от вышеопределенных направлений (лучей) от детекторов инфракрасного излучения на данный излучатель, выбранных с учетом амплитуд сигналов детекторов и/или взаимного углового расположения указанных направлений от детекторов на излучатели.
БИФПО 18 осуществляет индикацию фиксированных положений объекта, например, путем генерации соответствующих сигналов в моменты, когда объект с подвижными частями принимает заданные фиксированные положения (например, когда космонавт принимает выпрямленное и/или согнутое/сложенное положения).
В БОПОПИИСФПО 19 по координатам местоположений излучателей инфракрасных сигналов и сигналам индикации о нахождении объекта в заданных фиксированных положениях рассчитываются параметры относительного положения местоположений излучателей инфракрасных сигналов при фиксированных положениях объекта, которые передаются в БОППО 20.
В БОППО 20 на основе сопоставления текущих значений координат местоположений излучателей инфракрасных сигналов и значений параметров относительного положения излучателей инфракрасных сигналов, полученных при фиксированных положениях объекта, осуществляется определение текущих параметров положения объекта.
Определенные параметры положения объекта получены на основе определения положения как минимум двух точек, принадлежащих разным подвижным частям объекта, и таким образом наряду с местоположением космонавта несут информацию как об ориентации космонавта относительно элементов КА, так и о взаимном относительном положении данных частей объекта, т.е. информацию о текущей форме и ориентации объекта - например, выпрямлен или согнут/сложен объект с указанием возможного диапазона углов между подвижными частями объекта и в какую сторону он сориентирован. При этом объем и точность информации о текущей форме и ориентации объекта определяется количеством излучателей инфракрасных сигналов, установленных на разных подвижных частях объекта, и количеством фиксированных положений подвижных частей объекта, при которых определяются запоминаемые параметры относительного положения излучателей инфракрасных импульсных сигналов, используемые в дальнейшем для определения текущих параметров положения объекта.
Современный уровень развития техники обеспечивает малые габаритные и весовые характеристики как комплекта аппаратуры, размещаемого на объекте (космонавте), так и оборудования, размещаемого в разнесенных точках окружающего пространства (на КА).
Например, каждый комплект аппаратуры, размещаемый в одной из точек на объекте (космонавте) и выполненный на основе ИК-светодиодов L9337 производства фирмы Hamamatsu, имеет вес не более 0,025 кг и размер не более 40×40×40 мм. Каждый комплект аппаратуры, размещаемый в одной из разнесенных точек окружающего пространства (на КА) и выполненный на основе двухмерного позиционно-чувствительного детектора S5991-01 производства фирмы Hamamatsu и объектива BL02820M13 производства фирмы Beward, имеет массу не более 0,5 кг и размер не более 70×100×200 мм.
Опишем технический эффект предлагаемого изобретения.
Предложенные способ и система обеспечивают оперативное высокоточное определение положения объекта с подвижными частями, например, космонавта, свободно перемещающегося как воздушном пространстве - внутри герметичного отсека КА, так и в условиях вакуума - в открытом космическом пространстве снаружи КА.
Предлагаемые способ и система обеспечивают определение положения объекта, включая информацию о форме и ориентации объекта с подвижными частями, например, космонавта при его перемещениях в том числе по многомодульному КА, при этом не ограничивая данные перемещения и не создавая помех деятельности космонавта.
Предлагаемые способ и система обеспечивают возможность удобного и быстрого наращивания количества используемых излучателей и детекторов излучения, что позволяет быстро и экономично адаптировать систему как к изменению конфигурации окружающего пространства, так и к увеличению количества объектов, для которых определяется их положение, и увеличению количества размещаемых на объекте излучателей.
Достижение технического результата в предложенном изобретении обеспечивается за счет:
- использования инфракрасных импульсных сигналов, излучаемых излучателями, размещенными на подвижных частях объекта,
- определения параметров относительного положения излучателей при заданных фиксированных положениях подвижных частей объекта,
- регистрации излученного инфракрасного излучения позиционно-чувствительными детекторами инфракрасного излучения, размещенными предложенным способом в базовой системе координат,
- измерения параметров, генерируемых позиционно-чувствительными детекторами инфракрасного излучения, и предложенной методике использования измеренных параметров и их сопоставления с параметрами относительного положения излучателей, определенными при заданных фиксированных положениях объекта,
- использования радиоканала для управления и синхронизации моментов излучения, приема и передачи данных по результатам приема инфракрасных импульсных сигналов,
- малых габаритных и весовых характеристик комплекта аппаратуры, размещаемого на объекте (космонавте),
- малых габаритных и весовых характеристик комплекта аппаратуры, размещаемого в разнесенных точках окружающего пространства (на КА).
В том числе достижение технического результата в предложенной системе обеспечивается введением предложенных блоков, а также введением предложенных функциональных связей между блоками и предложенным исполнением уже известных блоков.
В настоящее время технически все готово для реализации предложенного способа. Промышленное исполнение существенных признаков, характеризующих изобретение, не является сложным и может быть выполнено с использованием существующих технических средств.
Система наддува топливных баков
Способ диагностики нерастворенных газовых включений в заправленных рабочими телами гидравлических системах космических аппаратов
Устройство подачи термостатирующей среды в отсек ракеты-носителя
Релейный регулятор
Способ формирования меток времени и устройство для его реализации
Привод
Радиальный вентилятор
Космическая головная часть ракеты-носителя
Способ разрушения микроорганизмов-биодеструкторов на поверхностях объектов в жилых отсеках космической станции
Резервированный счетчик для формирования меток времени
Способ контроля действий находящегося на борту космического аппарата космонавта
Способ контроля готовности космонавта к выполнению полетных операций
Способ контроля производительности солнечной батареи космического аппарата с инерционными исполнительными органами
Способ определения производительности установленной на космическом аппарате солнечной батареи с положительной выходной мощностью тыльной поверхности
Способ оценки состояния солнечной батареи космического аппарата с инерционными исполнительными органами
Способ контроля производительности солнечной батареи космического аппарата на бестеневых орбитах
Способ определения плотности атмосферы на высоте полета космического аппарата
Способ контроля системы энергопитания снабженного солнечными батареями космического аппарата
Способ контроля системы энергопитания снабженного солнечными батареями космического аппарата
Устройство для хранения и идентификации перемещаемых объектов на космическом аппарате

