Результат интеллектуальной деятельности: СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к области ракетной техники, а именно к системам ориентации космического аппарата.
Известен способ ориентации космического аппарата, заключающийся в измерении сигнала угла и сигнала угловой скорости, формировании сигнала задания и формировании сигнала управления космическим аппаратом.
Недостатком известного способа является низкая точность и надежность ориентации космического аппарата в случае отказа датчика угла и датчика угловой скорости вращения космического аппарата.
Известна система ориентации космического аппарата [1], содержащая последовательно соединенные первый сумматор, первый усилитель, второй сумматор, двигатель-маховик, третий сумматор, космический аппарат, датчик угловой скорости и датчик угла, а выход второго усилителя соединен с первым входом первого усилителя.
Низкая точность и надежность системы ориентации космического аппарата - недостаток известной системы.
С целью исключения указанных недостатков способ ориентации космического аппарата отличается тем, что формируют сигнал оценки угла и сигнал оценки угловой скорости вращения космического аппарата, формируют сигнал оценки управления, определяют сигнал разности сигнала угла и сигнала оценки угла, определяют сигнал разности сигнала угловой скорости и сигнала оценки угловой скорости, определяют сигнал разности сигнала управления и сигнала оценки управления и определяют скорректированный сигнал оценки угла, скорректированный сигнал оценки угловой скорости и сигнал оценки внешней помехи по формулам соответственно


где  - скорректированный сигнал оценки сигнала оценки угла
- скорректированный сигнал оценки сигнала оценки угла  - скорректированный сигнал оценки сигнала оценки угловой скорости
- скорректированный сигнал оценки сигнала оценки угловой скорости  - соответственно угол и угловая скорость, Km -коэффициент усиления двигателя-маховика, ΔU(t) - сигнал разности сигнала управления и сигнала оценки управления,
- соответственно угол и угловая скорость, Km -коэффициент усиления двигателя-маховика, ΔU(t) - сигнал разности сигнала управления и сигнала оценки управления,
и формируют сигнал управления с использованием скорректированного сигнала оценки угла, скорректированного сигнала оценки угловой скорости и сигнала оценки внешней помехи.
Устройство для реализации способа ориентации космического аппарата отличается тем, что оно содержит пять нормально замкнутых переключателей, два нормально разомкнутых переключателя, семь сумматоров, модель двигателя-маховика, два усилителя, пять интеграторов, выход четвертого сумматора через последовательно соединенные усилитель, пятый сумматор, шестой сумматор, модель двигателя-маховика, первый интегратор, седьмой сумматор, второй интегратор, восьмой сумматор, девятый сумматор, первый нормально замкнутый переключатель и третий интегратор соединен со вторым входом восьмого сумматора, выход которого соединен с первым входом четвертого сумматора, а через первый нормально разомкнутый переключатель - с первым входом первого сумматора, выход седьмого сумматора через четвертый усилитель соединен со вторым входом пятого сумматора, через второй нормально разомкнутый переключатель - со входом второго усилителя и через последовательно соединенные десятый сумматор, второй нормально замкнутый переключатель и четвертый интегратор - со вторым входом седьмого сумматора, выход шестого сумматора через последовательно соединенные одиннадцатый сумматор, третий нормально замкнутый переключатель и пятый интегратор соединен со вторым входом шестого сумматора, выход датчика угла соединен со вторым входом девятого сумматора и через четвертый нормально замкнутый переключатель - со вторым входом первого сумматора, выход датчика угловой скорости соединен со вторым входом десятого сумматора, а через пятый нормально замкнутый переключатель - со входом второго усилителя, выход второго сумматора подключен ко второму входу одиннадцатого сумматора, второй вход четвертого сумматора соединен с третьим входом первого сумматора.
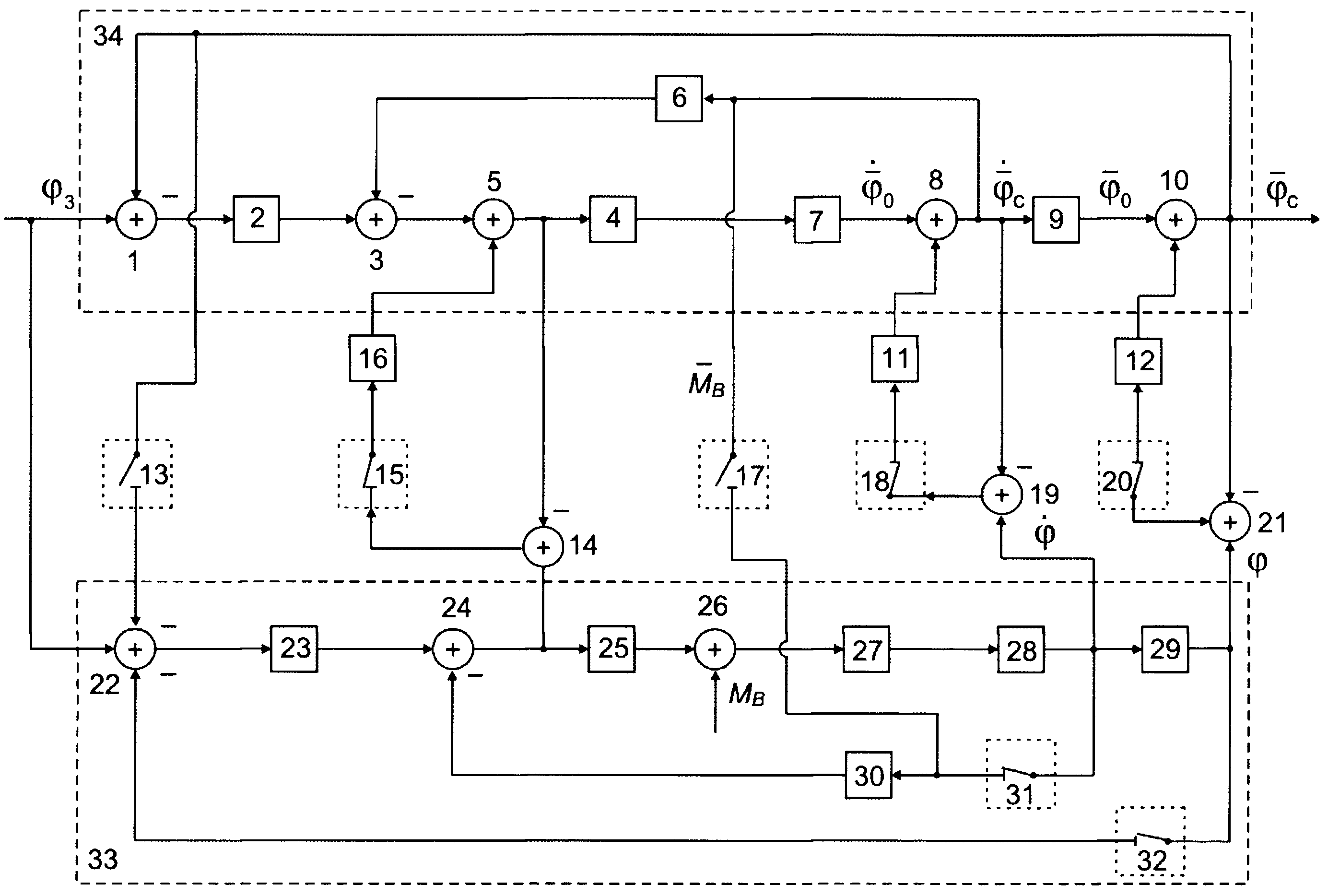
Функционирование устройства ориентации космического аппарата, реализующего предложенный способ, представлено на чертеже.
На чертеже приняты следующие обозначения:
1 - четвертый сумматор,
2 - третий усилитель,
3 - пятый сумматор,
4 - модель двигателя-маховика,
5 - шестой сумматор,
6 - четвертый усилитель,
7 - первый интегратор,
8 - седьмой сумматор,
9 - второй интегратор,
10 - восьмой сумматор,
11 - четвертый интегратор,
12 - третий интегратор,
13 - первый нормально разомкнутый переключатель,
14 - одиннадцатый сумматор,
15 - третий нормально замкнутый переключатель,
16 - пятый интегратор,
17 - второй нормально разомкнутый переключатель,
18 - второй нормально замкнутый переключатель,
19 - десятый сумматор,
20 - первый нормально замкнутый переключатель,
21 - девятый сумматор,
22 - первый сумматор,
23 - первый усилитель,
24 - второй сумматор,
25 - двигатель-маховик,
26 - третий сумматор,
27 - космический аппарат,
28 - датчик угловой скорости,
29 - датчик угла,
30 - второй усилитель,
31 - пятый нормально замкнутый переключатель,
32 - четвертый нормально замкнутый переключатель,
33 - основной контур ориентации (ОКО),
34 - модель ОКО.
Функционирует устройство для реализации способа ориентации следующим образом.
На входы первого сумматора 22 и четвертого сумматора 1 поступает сигнал задания φ3 угла ориентации.
Считаем, что в начале функционирования устройства датчики угла 29 и угловой скорости 28 исправны.
Основной контур ориентации 33 состоит в этом случае из последовательно соединенных первого сумматора 22, первого усилителя 23, второго сумматора 24, двигателя-маховика 25, третьего сумматора 26, космического аппарата 27, датчика угловой скорости 28 и датчика угла 29. Выход датчика угла 29 через четвертый нормально замкнутый переключатель 32 соединен со входом первого сумматора 22, а выход датчика угловой скорости 28 через последовательно соединенные пятый нормально замкнутый переключатель и второй усилитель соединен со входом второго сумматора 24.
В это же время функционирует параллельно и математическая модель основного контура управления. В математическую модель 34 основного контура управления входят четвертый сумматор 1, третий усилитель 2, пятый сумматор 3, модель двигателя-маховика 4, шестой сумматор 5, первый интегратор 7, седьмой сумматор 8, второй интегратор 9, восьмой сумматор 10 и четвертый усилитель 6.
Как видно из чертежа, на вход космического аппарата поступает внешняя помеха Мв, которая приводит к дополнительному повороту космического аппарата. В результате управление U(t) на выходе второго сумматора 24 будет отличаться от оценки управления Ū(t) на выходе пятого сумматора 3 математической модели 34, т.к. помеха Мв на математическую модель 34 не действует. Кроме того, момент инерции J(t) космического аппарата меняется во времени и точно его установить в математической модели 34 не удается. Указанные обстоятельства приведут к тому, что начальные оценки угловой скорости  на выходе первого интегратора 7 и начальная оценка угла
на выходе первого интегратора 7 и начальная оценка угла
 на выходе второго интегратора 9 будут далеки от точно измеренных
на выходе второго интегратора 9 будут далеки от точно измеренных  - датчиком угловой скорости 28 и φ - датчиком угла 29.
- датчиком угловой скорости 28 и φ - датчиком угла 29.
Управление U(t) в основном контуре ориентации 33 на выходе второго сумматора 24 будет отличаться от управления Um(t) в модели 34 ОКО, т.к. управление U (t) будет сформировано для компенсации действия внешней помехи Мв и вариации параметра J(t) - момента инерции космического аппарата.
Очевидно, что для обеспечения идентичности работы ОКО 33 и модели ОКО 34 необходимо оценить внешнюю помеху  и подать ее на вход шестого сумматора 5 подобно действию внешней помехи Мв на входе третьего сумматора 26 и скорректировать значения
и подать ее на вход шестого сумматора 5 подобно действию внешней помехи Мв на входе третьего сумматора 26 и скорректировать значения  и
и  .
.
С этой целью определим ΔU(t)=U(t) - Um(t), тогда можно оценить Мв в виде

Для того чтобы обеспечить равенство

на выходе девятого сумматора 21 определяется разность сигналов  и
и  и через последовательно соединенные первый нормально замкнутый переключатель 20 и третий интегратор 12 подается в качестве сигнала смещения на второй вход восьмого сумматора 10.
и через последовательно соединенные первый нормально замкнутый переключатель 20 и третий интегратор 12 подается в качестве сигнала смещения на второй вход восьмого сумматора 10.
Аналогично поддерживается равенство

с помощью соединения десятого сумматора 19, второго нормально замкнутого переключателя 18 и четвертого интегратора 11.
В результате получается, что выполняются равенства (1), (2) и (3). Другими словами, модель ОКО 34 функционирует идентично ОКО 33.
С этого момента модель ОКО можно использовать в качестве датчика угла 29 и датчика угловой скорости 28. Для этого достаточно одновременно переключатели 13 и 17 перевести в замкнутое состояние, а переключатели 15, 18, 20, 31 и 32 в разомкнутое состояние.
Далее по истечении некоторого времени в результате изменения MB(t) и J(t) требуется вернуть устройство реализации способа ориентации космическим аппаратом в первоначальное состояние и получить новые значения выходов пятого интегратора 16, четвертого интегратора 11 и третьего интегратора 12, которые соответствуют новым значениям U(t), Мв(t) и J(t) в ОКО 33.
Использование в качестве измерителя φ(t) и  модели ОКО 34 позволит достичь технического результата, который заключается в повышении надежности устройства и точности его функционирования.
модели ОКО 34 позволит достичь технического результата, который заключается в повышении надежности устройства и точности его функционирования.
Изобретательский уровень предложенного технического решения подтверждается отличительными частями формулы изобретения по пп.1 и 2.
Литература
1. Системы ориентации космических аппаратов/ В.Н. Васильев. - М.: ФГУП «НЛП ВНИИЭМ», 2009.



Способ контроля выставки гиростабилизированной платформы инерциальной системы
Многорежимное цифроаналоговое устройство управления угловым движением по тангажу беспилотного летательного аппарата
Модернизированное адаптивное устройство координированного управления летательным аппаратом
Способ ориентации космического аппарата по углу крена и устройство для его реализации
Виброизолятор
Способ ориентации космического аппарата по углу крена и устройство для его реализации
Способ управления ориентацией солнечной батареи низкоорбитального космического аппарата по вырабатываемому току
Способ автоматической ориентации космического аппарата и солнечной батареи при отказе устройства поворота солнечной батареи
Способ управления системой терморегулирования радиационной панели космического аппарата
Способ управления системой терморегулирования радиационных панелей космического аппарата при сбоях и отказах датчиков температур
Способ контроля выставки гиростабилизированной платформы инерциальной системы
Многорежимное цифроаналоговое устройство управления угловым движением по тангажу беспилотного летательного аппарата
Модернизированное адаптивное устройство координированного управления летательным аппаратом
Способ ориентации космического аппарата по углу крена и устройство для его реализации
Виброизолятор
Способ ориентации космического аппарата по углу крена и устройство для его реализации
Способ управления ориентацией солнечной батареи низкоорбитального космического аппарата по вырабатываемому току
Способ автоматической ориентации космического аппарата и солнечной батареи при отказе устройства поворота солнечной батареи
Способ управления системой терморегулирования радиационной панели космического аппарата
Способ управления системой терморегулирования радиационных панелей космического аппарата при сбоях и отказах датчиков температур

