Результат интеллектуальной деятельности: СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ПО УГЛУ КРЕНА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к области систем управления нестационарными объектами, в частности к системам управления ориентацией космического аппарата (КА) по углу крена при отсутствии измерителя угловой скорости.
Известен способ ориентации КА по углу крена, заключающийся в том, что формируют сигнал задания, измеряют угол крена, определяют сигнал ошибки, из которого формируют сигнал управления [1].
Известно также и устройство для ориентации КА по углу крена, содержащее последовательно соединенные первый сумматор, первый усилитель, второй сумматор, третий сумматор, двигатель-маховик, четвертый сумматор, космический аппарат и астродатчик, выход которого через первый нормально-замкнутый переключатель соединен с первым входом первого сумматора [1] (прототип).
Недостатками известных способа и устройства является низкая точность и надежность процедуры ориентации КА при отсутствии датчика угловой скорости и малой надежности астродатчика. С целью устранения указанных недостатков предложенный способ отличается тем, что определяют сигнал оценки угла крена, сигнал оценки угловой скорости, сигнал оценки ошибки и сигнал оценки управления, вычитают из сигнала ошибки сигнал оценки угловой скорости, определяют первый сигнал разности сигнала оценки управления и сигнала управления и суммируют сигнал управления и интеграл первого сигнала разности, определяют второй сигнал разности сигнала оценки угла крена и сигнала крена, формируют из второго сигнала разности сигнал суммы пропорциональной, дифференциальной и интегральной составляющих и сигнал суммы вычитают из сигнала оценки ошибки.
Устройство для реализации способа ориентации КА отличается тем, что оно дополнительно содержит четыре интегратора, два блока памяти, два нормально-замкнутых переключателя, нормально-разомкнутый переключатель, три усилителя, шесть сумматоров, второй вход первого сумматора через последовательно соединенные пятый сумматор, второй усилитель, шестой сумматор, модель двигателя-маховика, первый интегратор, седьмой сумматор, второй интегратор, восьмой сумматор, второй нормально-замкнутый переключатель, третий интегратор, девятый сумматор, третий нормально-замкнутый переключатель и первый блок памяти подключен ко второму входу пятого сумматора, выход второго нормально-замкнутого переключателя соединен со вторым входом девятого сумматора, а через второй блок памяти - со вторым входом седьмого сумматора, выход которого через третий усилитель соединен со вторыми входами второго и шестого сумматоров, выход астродатчика соединен со вторым входом восьмого сумматора, выход второго интегратора соединен с третьим входом пятого сумматора, а через нормально-разомкнутый переключатель - с третьим входом первого сумматора, выход шестого сумматора соединен через последовательно подключенные десятый сумматор, четвертый усилитель и четвертый интегратор со вторым входом третьего сумматора, выход которого соединен со вторым входом десятого сумматора.
Устройство для реализации способа ориентации КА приведено на чертеже.
Рассматривается случай, когда датчик угловой скорости  отсутствует, а в качестве измерителя угла крена φ(t) используется астродатчик. На чертеже приняты следующие обозначения:
отсутствует, а в качестве измерителя угла крена φ(t) используется астродатчик. На чертеже приняты следующие обозначения:
1 - пятый сумматор;
2 - второй усилитель;
3 - шестой сумматор;
4 - модель двигателя-маховика;
5 - третий сумматор;
6 - третий усилитель;
7 - второй блок памяти;
8 - первый интегратор;
9 - второй интегратор;
10 - нормально-разомкнутый переключатель;
11 - десятый сумматор;
12 - четвертый усилитель;
13 - третий нормально-замкнутый переключатель;
14 - четвертый интегратор;
15 - первый блок памяти;
16 - девятый сумматор;
17 - третий интегратор;
18 - восьмой сумматор;
19 - второй нормально-замкнутый переключатель;
20 - первый нормально-замкнутый переключатель;
21 - астродатчик;
22 - основной контур ориентации (ОКО);
23 - первый сумматор;
24 - первый усилитель;
25 - второй сумматор;
26 - двигатель-маховик;
27 - четвертый сумматор;
28 - космический аппарат (КА);
29 - модель ОКО;
30 - седьмой сумматор.
Структура ОКО 22 описана в [1] и отличается лишь тем, что в ней отсутствует датчик угловой скорости  в обратной связи. Именно поэтому ОКО 22 в исходном состоянии неустойчив. Получение угловой скорости
путем дифференцирования выходного сигнала астродатчика φ(t) нежелательно, т.к. сигнал φ(t) измеряется с помехой и при дифференцировании сигнал
будет определяться с большой ошибкой.
в обратной связи. Именно поэтому ОКО 22 в исходном состоянии неустойчив. Получение угловой скорости
путем дифференцирования выходного сигнала астродатчика φ(t) нежелательно, т.к. сигнал φ(t) измеряется с помехой и при дифференцировании сигнал
будет определяться с большой ошибкой.
Структура ОКО 22, как видно из чертежа, состоит из последовательно соединенных первого сумматора 23, первого усилителя 24, второго сумматора 25, третьего сумматора 5, двигателя-маховика 26, четвертого сумматора 27, КА 28 и астродатчика 21, выход которого соединен со входом первого сумматора 23 через первый нормально-замкнутый переключатель 20.
Для устойчивости ОКО 22 не хватает обратной связи по угловой скорости
[1]. На входы КА 28 поступают координатная MB(t) и параметрическая F(t) помехи, которые уменьшают точность ориентации КА 28. Для обеспечения устойчивости ОКО 22 введена параллельно модель ОКО 29 (на чертеже обведен пунктирной линией), которая по структуре аналогична ОКО 22 и состоит из пятого сумматора 1, второго усилителя 2, шестого сумматора 3, модели двигателя-маховика 4, первого интегратора 8, седьмого сумматора 30, второго интегратора 9 и третьего усилителя 6.
Дифференциальные уравнения (ДУ), описывающие движение ОКО 22 и модели ОКО 29, имеют второй порядок [1], а параметры дифференциальных уравнений не равны, т.к. момент инерции J(t) КА 28 меняется во времени и является неизвестной величиной.
Параметры ДУ модели ОКО 29 выбраны так, чтобы они обеспечивали устойчивость движения. Для обеспечения устойчивости ОКО 22 на вход второго сумматора 25 подается через третий усилитель 6 оценка угловой скорости  .
.
Для обеспечения точности определения оценки
вводится цепь компенсации, состоящая из десятого сумматора 11, четвертого усилителя 12 и четвертого интегратора 14, которая формирует на выходе четвертого интегратора 14 сигнал ΔU(t), компенсирующий действие помехи MB(t) в ОКО 22 при условии, что  , т.е. при равенстве параметров ДУ ОКО 22 и модели ОКО 29. Действительно, на ОКО 22 помеха MB(t) действует, а на модель ОКО 29 не действует, поэтому управление U(t), получаемое с выхода третьего сумматора 5, и оценка управления
, т.е. при равенстве параметров ДУ ОКО 22 и модели ОКО 29. Действительно, на ОКО 22 помеха MB(t) действует, а на модель ОКО 29 не действует, поэтому управление U(t), получаемое с выхода третьего сумматора 5, и оценка управления  с выхода шестого сумматора 3 не будут совпадать. Разность
с выхода шестого сумматора 3 не будут совпадать. Разность  с выхода десятого сумматора 11 через четвертый усилитель 12 поступает на вход четвертого интегратора 14, который изменяет свой выходной сигнал до тех пор, пока U(t) не будет равен
с выхода десятого сумматора 11 через четвертый усилитель 12 поступает на вход четвертого интегратора 14, который изменяет свой выходной сигнал до тех пор, пока U(t) не будет равен  . Но так как причиной возникновения неравенства
. Но так как причиной возникновения неравенства  является действие помехи MB(t), то при
является действие помехи MB(t), то при 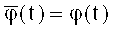 и
и  действие MB(t) в ОКО 22 будет скомпенсировано сигналом ΔU(t) с выхода четвертого интегратора 14.
действие MB(t) в ОКО 22 будет скомпенсировано сигналом ΔU(t) с выхода четвертого интегратора 14.
Для обеспечения равенства  формируется с использованием метода покомпонентного формирования управлений (МПФУ) [2] сигнал коррекции модели ОКО 29 в виде
формируется с использованием метода покомпонентного формирования управлений (МПФУ) [2] сигнал коррекции модели ОКО 29 в виде

где  ,
,
λ, а 0, а 1=const>0,
и который может быть представлен в виде составляющих  и
и  :
:

где  ,
,

Сигнал коррекции  реализуется с помощью соединения восьмого сумматора 18, второго нормально-замкнутого переключателя 19, третьего интегратора 17, девятого сумматора 16, третьего нормально-замкнутого переключателя 13, первого блока памяти 15 и пятого сумматора 1.
реализуется с помощью соединения восьмого сумматора 18, второго нормально-замкнутого переключателя 19, третьего интегратора 17, девятого сумматора 16, третьего нормально-замкнутого переключателя 13, первого блока памяти 15 и пятого сумматора 1.
Сигнал коррекции  непосредственно реализовать нельзя, т.к. для определения
непосредственно реализовать нельзя, т.к. для определения  требуется измеритель угловой скорости
требуется измеритель угловой скорости  , который в ОКО 22 отсутствует, поэтому путем эквивалентного преобразования вместо
, который в ОКО 22 отсутствует, поэтому путем эквивалентного преобразования вместо  на входе модели ОКО 29 сигнал λε(t) подается на вход седьмого сумматора 30, установленного после первого интегратора 8.
на входе модели ОКО 29 сигнал λε(t) подается на вход седьмого сумматора 30, установленного после первого интегратора 8.
В этом случае корректирующий сигнал -λε(t) не требует наличия датчика угловой скорости
в ОКО 22.
Наличие первого 20 и второго 19 нормально-замкнутых переключателей, а также нормально-разомкнутого переключателя 10 позволяет на некоторое время (как показывает практика использования процесса ориентации КА 28, на время приблизительно 5-10 минут) отключать астродатчик 21 и использовать для организации функционирования ОКО 29 только информацию об оценках угловой скорости
и угла крена  .
.
Таким образом, в случае выхода из строя гироскопического измерителя вектора угловой скорости (который может применяться вместо астродатчика 21 [1]) или астродатчика 21 путем переключения ОКО 22 на измерения с помощью исправного измерителя угловой скорости
или угла крена  повышается точность и надежность процедуры ориентации КА по углу крена.
повышается точность и надежность процедуры ориентации КА по углу крена.
Изобретательский уровень предложенного технического решения подтверждается отличительными частями формулы изобретения.
Литература
1. Васильев В.Н. Системы ориентации космических аппаратов / В.Н. Васильев. - М.: ФГУП «НПП ВНИИЭМ», 2009. С.149-156 (прототип).
2. Лащев А.Я. Метод синтеза адаптивных систем управления с эталонной моделью. Приборы и системы. Управление, контроль, диагностика. 2007. №1. С.2-6.
Устройство ориентации космического аппарата по углу крена, содержащее последовательно соединенные первый сумматор, первый усилитель, второй сумматор, третий сумматор, двигатель-маховик, четвертый сумматор, космический аппарат и астродатчик, выход которого через первый нормально-замкнутый переключатель соединен с первым входом первого сумматора, отличающееся тем, что оно дополнительно содержит четыре интегратора, два блока памяти, два нормально-замкнутых переключателя, нормально-разомкнутый переключатель, три усилителя, шесть сумматоров, второй вход первого сумматора через последовательно соединенные пятый сумматор, второй усилитель, шестой сумматор, модель двигателя-маховика, первый интегратор, седьмой сумматор, второй интегратор, восьмой сумматор, второй нормально-замкнутый переключатель, третий интегратор, девятый сумматор, третий нормально-замкнутый переключатель и первый блок памяти подключен ко второму входу пятого сумматора, выход второго нормально-замкнутого переключателя соединен со вторым входом девятого сумматора, а через второй блок памяти - со вторым входом седьмого сумматора, выход которого через третий усилитель соединен со вторыми входами второго и шестого сумматоров, выход астродатчика соединен со вторым входом восьмого сумматора, выход второго интегратора соединен с третьим входом пятого сумматора, а через нормально-разомкнутый переключатель - с третьим входом первого сумматора, выход шестого сумматора соединен через последовательно подключенные десятый сумматор, четвертый усилитель и четвертый интегратор со вторым входом третьего сумматора, выход которого соединен со вторым входом десятого сумматора.
Способ формирования цифроаналогового сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов и устройство для его осуществления
Система стабилизации углового движения космического аппарата
Способ повышения теплоотдачи и радиационной защиты электронных блоков
Способ формирования сигнала управления угловым движением нестационарного летательного аппарата и устройство для его осуществления
Способ функционального контроля и резервирования плат измерительного канала угловой скорости космического аппарата и устройство для его реализации
Способ формирования цифроаналогового адаптивного сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ формирования цифроаналогового адаптивного сигнала управления летательным аппаратом с переменной структурой и устройство для его осуществления
Способ формирования цифроаналогового сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата и устройство для его реализации
Способ формирования сигнала управления газогидравлическим рулевым приводом и устройство для его реализации
Способ формирования цифроаналогового сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов и устройство для его осуществления
Система стабилизации углового движения космического аппарата
Способ повышения теплоотдачи и радиационной защиты электронных блоков
Способ формирования сигнала управления угловым движением нестационарного летательного аппарата и устройство для его осуществления
Способ функционального контроля и резервирования плат измерительного канала угловой скорости космического аппарата и устройство для его реализации
Способ формирования цифроаналогового адаптивного сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ формирования цифроаналогового адаптивного сигнала управления летательным аппаратом с переменной структурой и устройство для его осуществления
Способ формирования цифроаналогового сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата и устройство для его реализации
Способ формирования сигнала управления газогидравлическим рулевым приводом и устройство для его реализации

