Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА И СОЛНЕЧНОЙ БАТАРЕИ ПРИ ОТКАЗЕ УСТРОЙСТВА ПОВОРОТА СОЛНЕЧНОЙ БАТАРЕИ
Вид РИД
Изобретение
Областью применения способа автоматической ориентации космического аппарата (КА) и солнечной батареи (СБ) при отказе устройства поворота солнечной батареи является космическая техника. Способ может быть применен при управлении спутниками, космическими станциями и другими космическими аппаратами, имеющими устройство поворота СБ.
При помощи СБ осуществляется снабжение электроэнергией бортового оборудования КА, включая заряд его аккумуляторных батарей, при этом величина тока, вырабатываемого СБ зависит от ориентации плоскости ее рабочей поверхности относительно направления на Солнце.
Управление ориентацией КА и его бортовым оборудованием осуществляется при помощи алгоритмов, реализованных в бортовых вычислительных машинах, входящих в состав системы управления КА.
В состав аппаратных средств, обеспечивающих управление ориентацией СБ входят блоки сопряжения и устройство поворота СБ с электромеханическим приводом, на выходном валу которого жестко закреплена панель СБ. Устройство поворота СБ, в свою очередь, содержит электронные блоки и электромеханический привод с закрепленными на его выходном валу датчиками положения и панелью СБ.
Алгоритмы системы управления КА обеспечивают определение положения связанной с ним системы координат относительно других систем координат, а также необходимую ориентацию КА. Кроме того, при помощи алгоритмов осуществляется управление бортовым оборудованием КА, в том числе управление ориентацией СБ. Блоки сопряжения системы управления КА обеспечивают преобразование параллельных или последовательных кодов, формируемых бортовой вычислительной машиной, в команды управления вращением СБ, поступающие в электронные блоки устройства поворота СБ, а также преобразование сигналов углового положения СБ, формируемых устройством поворота СБ, в коды бортовой вычислительной машины. Электронные блоки устройства поворота СБ обеспечивают преобразование команд, поступающих из системы управления КА, в форму, необходимую для управления электромеханическим приводом, а также преобразование сигналов от датчиков положения СБ в форму, необходимую для передачи в систему управления. Как правило, поворот СБ относительно корпуса КА осуществляется по кругу 360° на неограниченный угол, при этом связь с СБ осуществляется через кольцевое токосъемное кольцо.
Угловая скорость вращения выходного вала электромеханического привода с закрепленной СБ во время полета КА по установившейся орбите обычно более, чем на порядок превышает максимальную угловую скорость изменения положения КА относительно Солнца. Например, при вращении КА по эллиптической орбите вокруг планеты указанная максимальная угловая скорость достигается в перигее орбиты.
В процессе полета КА навигационная система, реализованная в системе управления КА, непрерывно рассчитывает кватернион текущей ориентации связанной с КА системы координат, например, относительно инерциальной системы координат J2000 [1], матрицу перехода текущей ориентации связанной системы координат КА по показаниям гироскопических приборов, а также единичный вектор направления на Солнце относительно связанных с КА осей координат, который определяется в результате измерения соответствующим датчиком направления на Солнце или рассчитывается по текущему времени.
Управление положением КА в пространстве осуществляется при помощи инерциальной системы навигации, которая имеет в своем составе датчики угловой скорости (гироскопы) и линейного ускорения (акселерометры). С помощью гироскопов определяется отклонение связанной с КА системы осей координат от системы осей координат, связанной с Землей или другой планетой, путем измерения углов ориентации: курса, тангажа и крена. Линейное отклонение координат в виде широты, долготы и высоты определяется путем интегрирования показаний акселерометров. Например, в случае функционирования КА на орбите Земли в качестве базовой инерциальной системы координат, в которой, в частности, зафиксированы координаты звезд в астрономических каталогах, используется инерциальная геоцентрическая система координат.
Во время полета КА по заданной орбите система управления при помощи алгоритмов управления движением, реализованных в бортовой вычислительной машине, рассчитывает кватернион заданной ориентации связанной с КА системы координат (ССК) в инерциальной системе координат (ИСК). Например, для телекоммуникационных спутников система управления поддержиет ориентацию, при которой ось X направлена на центр Земли, ось Y - перпендикулярно плоскости орбиты, Z - дополняет до правой системы осей координат [1], а ориентация панели СБ осуществляется по рассогласованию проекции единичного вектора направления на Солнце и нормали к рабочей поверхности СБ в плоскости ее вращения. Поддержание заданной ориентации КА или изменение его положения производится, как правило, при помощи двигателей-маховиков или реактивных двигателей [1], управление которыми осуществляется в соответствии с алгоритмами системы стабилизации и ориентации по рассогласованию между кватернионами текущей и заданной ориентации.
На работу бортового оборудования КА во время его функционирования оказывают влияние различные внешние факторы: излучение Солнца, космические излучения, перепады температур, микрометеориты и другие.
Указанные факторы могут приводить к временным сбоям или необратимым отказам функционирования его бортового оборудования и, соответственно, к нарушению исполнения команд управления ориентацией СБ. Например, из-за геомагнитных явлений в магнитосфере Земли на поверхностях блоков бортового оборудования в их различных точках могут накапливаться электростатические заряды, имеющие различные потенциалы. Причинами их накопления могут быть инжекция электронов и протонов космической плазмы, ионизирующие космические излучения, энергия падающих частиц, вторичная эмиссия электронов и другие факторы. После накопления критической разности потенциалов происходит электростатический разряд, который представляет собой электрический пробой. Во время указанного разряда возникает сигнал помехи, который может искажать информацию, поступающую от датчиков положения СБ в бортовую вычислительную машину КА через бортовую кабельную сеть.
Отказы исполнения команд управления ориентацией СБ могут быть обусловлены постоянными или временными нарушениями связей между бортовой вычислительной машиной и электромеханическим приводом, например, из-за отказа или сбоя при работе микросхем, входящих в состав устройства сопряжения или блоков электроники СБ. Кроме того, отказ может быть вызван заклиниванием выходного вала электромеханического привода СБ в результате соприкосновения панели СБ с бортовым оборудованием КА, например, при наличии физических ограничений угла поворота СБ, а также из-за попадания микрометеоритов или космического мусора на элементы конструкции КА. Указанное заклинивание может происходить также из-за перепадов температур, на затененных и освещенных элементах конструкции КА, а также вследствие износа механизма поворота СБ может происходить деформация подвижных частей в механизме самого электромеханического привода.
В процессе функционирования КА система управления КА определяет угловое положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ и угловое положение указанной нормали относительно связанных с КА осей координат. При превышении величины рассогласования между указанными угловыми положениями порога срабатывания, система управления КА формирует команды на вращение СБ для его уменьшения, а при достижении порога отпускания на прекращение вращения СБ. При возникновении отказа устройства поворота СБ управление ориентацией панели СБ прекращается. Для сохранения работоспособности бортовых систем КА необходимо изменить и поддерживать такую ориентацию КА, чтобы ток от панелей СБ был достаточным для обеспечения функционирования его бортового оборудования. Поскольку величина вырабатываемого СБ тока зависит от углового рассогласования между нормалью к ее рабочей поверхности и направлением на Солнце, то максимальный ток от СБ может быть обеспечен при их совмещении. Таким образом, в случае отказа устройства поворота СБ, для обеспечения максимального тока необходимо произвести разворот КА до совмещения указанного вектора нормали с единичным вектором направления на Солнце.
Во время полета КА в наземный комплекс управления постоянно поступает телеметрическая информация, характеризующая положение КА в пространстве, а также состояние его бортового оборудования. После анализа технического состояния систем КА, в случае отказа устройства поворота СБ, специалистами наземного комплекса управления принимается решение о продолжении, либо об изменении режима управления СБ, при этом задействуются, например, резервные связи, либо датчики или изменяется режим управления КА. Режим управления ориентацией КА или СБ задается соответствующими командами из наземного комплекса управления, который поступает в систему управления КА через бортовой радиотехнический комплекс.
На время анализа специалистами телеметрической информации, полученной при указанном отказе, и принятия решения о продолжении работы требуется обеспечить функционирование бортового оборудования КА, для чего СБ должна вырабатывать ток достаточной величины.
Известен способ ориентации КА, сущность которого заключается в том, что оси связанной системы координат КА (Xка, Yкa, Zкa) совмещают с осями солнечно-орбитальной системы координат (Хсоск, Yсоск, Zсоск). При этом ось Yсоск направлена на Солнце, а совмещаемая с ней ось Yкa перпендикулярна к рабочей поверхности солнечных батарей КА. Оси Xсоск и Xка лежат в плоскости орбиты КА и характеризуют общее (на определенном полувитке орбиты) направление движения КА. Ось Zсоск дополняет систему осей координат до правой прямоугольной. Солнечно-орбитальная система координат является квазиинерциальной по отношению к Солнцу. Ось Yсоск задается на борту КА датчиком направления на Солнце. Линейная скорость движения КА и плоскость его орбиты определяются известными методами и средствами [2].
Недостатком данного способа является необходимость жесткого закрепления на корпусе КА панели СБ таким образом, чтобы нормаль к рабочей поверхности СБ совпадала с направлением Yкa связанной с КА оси координат, так как при значительных отклонениях указанной нормали от оси Yкa, например, на угол 90°, величина тока, вырабатываемая СБ, становится недостаточной для обеспечения работоспособности бортового оборудования.
Известен способ управления положением СБ, заключающийся в том, что определяют заданный угол установки СБ относительно связанных с КА осей координат и измерение углового положения нормали к рабочей поверхности СБ относительно указанных осей координат. Углы измеряются датчиком угла с точностью до некоторого дискретного углового сектора, определяют угловую скорость СБ, затем по времени пересечения батареей границы между дискретными секторами датчика угла вычисляют расчетный угол относительно измеренного углового положения СБ как произведение угловой скорости СБ на время ее вращения. Вращают СБ в направлении уменьшения рассогласования между заданным и расчетным ее углами. По соответствующим углам отклонения нормали к рабочей поверхности СБ определяют углы разбега и торможения СБ. Корректируют расчетный угол по измеренному угловому положению указанной нормали в моменты изменения показаний датчика угла на величину одного дискретного сектора. По углам разбега и торможения, а также по минимально допустимому и максимально возможному токам, вырабатываемых СБ, задают порог срабатывания. При превышении этого порога формируется рассогласование между заданным и расчетным углами СБ. Задают также порог отпускания, менее которого прекращается рассогласование между заданным и расчетным углами СБ. Вращение СБ прекращают, если рассогласование между заданным и расчетным углами начинает увеличиваться, но не превышает порога срабатывания [3].
Недостатком данного способа является невозможность обеспечения током бортового оборудования КА в течение продолжительного времени при отказах по вращению СБ, так как в случае отсутствия вращения СБ относительно корпуса КА панель СБ вращается вместе с корпусом КА, совершая развороты на угол 360° относительно направления на Солнце.
Наиболее близким техническим решением, принятым за прототип, является способ автоматической ориентации космического аппарата и солнечной батареи при отказе устройства поворота солнечной батареи, заключающийся в том, что измеряют текущее угловое положение солнечной батареи как направление нормали к ее рабочей поверхности с точностью до дискретного сектора датчика угла, одновременно определяют заданное направление, в случае рассогласования между заданным направлением и текущим угловым положением солнечной батареи формируют команды на вращение солнечной батареи по или против часовой стрелки относительно оси выходного вала устройства поворота солнечной батареи в направлении его уменьшения, а в случае отсутствия рассогласования формируют команды на прекращение вращения солнечной батареи, задают постоянную угловую скорость вращения выходного вала устройства поворота солнечной батареи, превышающую на порядок и более угловую скорость обращения космического аппарата вокруг Земли, определяют время и угол разгона солнечной батареи с момента выдачи команды на вращение до установившегося фиксированного значения угловой скорости солнечной батареи, определяют время и угол торможения солнечной батареи после момента выдачи команды на прекращение вращения до полной остановки солнечной батареи, задают угловой порог отпускания, задают угловой порог срабатывания, формируют сигнал рассогласования, если угол между заданным и текущим углами солнечной батареи превышает порог срабатывания, прекращают формирование сигнала рассогласования, если во время вращения солнечной батареи величина угла рассогласования достигает величины менее порога отпускания, или равна 0°, или если знак угла рассогласования на момент начала вращения не совпадает со знаком рассогласования на момент окончания вращения и при этом угол рассогласования не превышает порога срабатывания, задают пороговое значение времени контроля вращения, отсчитывают текущее время контроля после выдачи команды на вращение солнечной батареи, прекращают отсчет текущего времени контроля после выдачи команды на прекращение вращения, по истечении времени торможения сбрасывают текущее время контроля в момент смены направления вращения и в момент пересечения границы между дискретными секторами датчика угла, формируют команду на прекращение вращения и сигнал отказа по управлению устройством поворота солнечной батареи при превышении текущим временем контроля указанного порогового значения времени контроля [4].
Недостатком известного способа является постепенное снижение тока, вырабатываемого СБ, в процессе полета КА по орбите после отказа по управлению устройства поворота СБ из-за изменения положения СБ относительно Солнца.
Во время поворота КА для работы двигателей-маховиков используется электроэнергия, вырабатываемая панелями СБ или от аккумуляторных батарей, а при работе двигателей ориентации КА осуществляется расход рабочего тела, обеспечивающего реактивную тягу. Заряд аккумуляторных батарей и запас рабочих тел двигателя на борту КА ограничен, в связи с чем стоит задача минимизировать затраты указанных бортовых ресурсов при повороте КА в заданную ориентацию. Указанные затраты могут быть минимальными, если поворот КА при переходе из начальной ориентации в новую заданную ориентацию производится по оптимальному пути, то есть на минимальный угол.
Техническим результатом изобретения является продление ресурса функционирования и повышение живучести КА за счет бесперебойного снабжения электроэнергией и минимизации расхода имеющихся на борту рабочих тел двигателей при отказе устройства поворота СБ. Указанный технический результат достигается за счет автоматического поворота КА по минимальному углу в положение, при котором СБ может вырабатывать ток, достаточный для функционирования бортового оборудования КА.
Указанный технический результат достигается тем, что в известном способе автоматической ориентации космического аппарата и солнечной батареи при отказе устройства поворота солнечной батареи, заключающемся в том, что измеряют текущее угловое положение солнечной батареи как направление нормали к ее рабочей поверхности с точностью до дискретного сектора датчика угла, одновременно определяют заданное направление, в случае рассогласования между заданным направлением и текущим угловым положением солнечной батареи формируют команды на вращение солнечной батареи по или против часовой стрелки относительно оси выходного вала устройства поворота солнечной батареи в направлении его уменьшения, а в случае отсутствия рассогласования формируют команды на прекращение вращения солнечной батареи, задают постоянную угловую скорость вращения выходного вала устройства поворота солнечной батареи, превышающую на порядок и более угловую скорость обращения космического аппарата вокруг Земли, определяют время и угол разгона солнечной батареи с момента выдачи команды на вращение до установившегося фиксированного значения угловой скорости солнечной батареи, определяют время и угол торможения солнечной батареи после момента выдачи команды на прекращение вращения до полной остановки солнечной батареи, задают угловой порог отпускания, задают угловой порог срабатывания, формируют сигнал рассогласования, если угол между заданным и текущим углами солнечной батареи превышает порог срабатывания, прекращают формирование сигнала рассогласования, если во время вращения солнечной батареи величина угла рассогласования достигает величины менее порога отпускания, или равна 0°, или если знак угла рассогласования на момент начала вращения не совпадает со знаком рассогласования на момент окончания вращения и при этом угол рассогласования не превышает порога срабатывания, задают пороговое значение времени контроля вращения, отсчитывают текущее время контроля после выдачи команды на вращение солнечной батареи, прекращают отсчет текущего времени контроля после выдачи команды на прекращение вращения, по истечении времени торможения сбрасывают текущее время контроля в момент смены направления вращения и в момент пересечения границы между дискретными секторами датчика угла, формируют команду на прекращение вращения и сигнал отказа по управлению устройством поворота солнечной батареи при превышении текущим временем контроля указанного порогового значения времени контроля, дополнительно задают угловой порог отпускания солнечной батареи, как:
αотп≈αторм,
где: αотп - угол отпускания солнечной батареи;
αторм - угол торможения солнечной батареи,
задают дискретным секторам датчика угла равные величины в диапазоне:
(αразг+αторм)<σду<αср,
где: αразг - угол разгона солнечной батареи;
αторм - угол торможения солнечной батареи;
σду - дискретный сектор датчика угла;
αср - порог срабатывания,
задают величину углового порога срабатывания в диапазоне:

где: Imin - задаваемый минимально допустимый ток, вырабатываемый солнечной батареей;
Imax - максимально возможный ток, вырабатываемый солнечной батареей,
задают пороговое значение времени контроля вращения в диапазоне:

где: tpaзг - время разгона солнечной батареи;
tторм - время торможения солнечной батареи;
τпв - пороговое значение времени контроля вращения;
ωсб - установившаяся угловая скорость солнечной батареи,
дополнительно используют датчик фиксированного положения, формирующий сигналы, соответствующие фиксированным угловым положениям 0°, 90°, 180°, 270°, если отклонения нормали от указанных положений не превышает угла торможения, задают значение времени ожидания установки солнечной батареи в фиксированное положение, в диапазоне:
где: τож - время ожидания установки солнечной батареи в фиксированное положение,
при отсутствии сигнала отказа по управлению устройством поворота солнечной батареи определяют заданный угол, как угловое положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности солнечной батареи, в момент появления сигнала отказа фиксируют положение космического аппарата относительно Солнца, присваивают заданному углу величину, равную ближайшему фиксированному углу 0°, 90°, 180° или 270°, и начинают отсчет времени установки, в момент достижения временем установки порогового значения прекращают управление вращением солнечной батареи, при этом, если датчик фиксированного положения формирует сигнал, соответствующий заданному углу, принимают значение углового положения нормали соответствующим указанному фиксированному углу, а если датчик фиксированного положения не формирует сигнал, соответствующий ближайшему фиксированному углу, то принимают значение углового положения нормали соответствующим значению соответствующего дискретного сектора датчика угла и разворачивают космический аппарат по кратчайшему пути до совмещения положения нормали с единичным вектором направления на Солнце.
На фиг. 1 показано положение КА на орбите планеты, на фиг. 2 - круг дискретного сектора датчика угла, на фиг. 3 - датчик фиксированных положений СБ, на фиг. 4 показано изменение положения КА при отказе вращения СБ.
Предлагаемый способ автоматической ориентации космического аппарата и солнечной батареи при отказе устройства поворота солнечной батареи реализуется следующим образом.
До начала управления КА определяют величину максимально-возможного тока, который может вырабатывать СБ, а также минимального тока, достаточного для электроснабжения бортовой аппаратуры, который должна вырабатывать СБ при движении КА по заданной орбите.
Для управления ориентацией СБ относительно корпуса КА используют устройство поворота СБ с постоянной угловой скоростью вращения выходного вала электромеханического привода, превышающую на порядок и более угловую скорость вращения космического аппарата относительно Солнца при полете по заданной орбите вокруг планеты, то есть:
ωсб>10·ωка,
где: ωсб - установившаяся угловая скорость СБ;
ωmахка - максимальная угловая скорость КА при полете по заданной орбите.
По паспортным данным на электромеханический привод, входящий в состав устройства поворота СБ, а также экспериментальным путем на стендах реального оборудования определяют время и угол разгона СБ от момента выдачи команды на вращение до момента достижения СБ установившейся угловой скорости, а также время и угол торможения СБ от момента выдачи команды на прекращение вращения до момента полной остановки СБ.
Как известно, ток вырабатываемый СБ зависит от углового отклонения нормали к рабочей поверхности СБ, от проекции единичного вектора направления на Солнце на плоскость вращения этой нормали. Указанное отклонение нормали соответствует значению текущего углового положения СБ, а проекция - заданному угловому положению СБ. Ток, формируемый СБ, с достаточной степенью точности может быть определен при помощи уравнения:

где: I - ток, формируемый СБ;
Imax - максимально возможный ток, формируемый СБ, при совпадении проекции единичного вектора направления на Солнце и нормали к рабочей поверхности СБ в плоскости ее вращения;
αтек - текущий угол СБ;
αзад - заданный угол СБ;
|αзад-αтек| - модуль разности заданного и текущего углового положения СБ.
Отсчет углового положения нормали и указанной выше проекции осуществляется относительно связанных с КА осей координат. Величина максимально допустимого углового отклонения положения нормали к рабочей поверхности СБ относительно связанной с КА системы координат от заданного направления ограничивается, как правило, техническими требованиями к обеспечению бортового оборудования КА электроэнергией, то есть минимально допустимым током, который должна вырабатывать СБ. Учитывая уравнение (1), величина максимально допустимого углового отклонения нормали к рабочей поверхности СБ от заданного направления на Солнце определяется неравенством:

где: αmax - максимально допустимое угловое отклонение нормали к рабочей поверхности СБ от проекции единичного вектора направления на Солнце на плоскость ее вращения;
Imin - минимально допустимый ток.
Во время полета КА по заданной орбите система навигации при отсутствии отказов устройства поворота СБ с помощью датчика направления на Солнце определяет или по времени непрерывно рассчитывает единичный вектор направления на Солнце в связанной с КА системе координат (ССК) как проекцию указанного вектора на плоскость вращения нормали к рабочей поверхности СБ, а при помощи дискретного датчика угла, установленного на выходном валу электромеханического привода СБ, измеряют угловое положение СБ. Указанные измерения осуществляют относительно связанных с КА осей координат Xка, Yкa, Zкa.
Текущее угловое положение СБ измеряют как направление нормали к ее рабочей поверхности с точностью до дискретного сектора датчика угла, при этом круг датчика угла разбит на равные дискретные сектора, величиной:
(αразг+αторм)<σду<αср,
где: αразг - угол разгона СБ;
αторм - угол торможения СБ;
σду - дискретный сектор датчика угла;
αср - порог срабатывания.
Задают угловой порог срабатывания СБ в диапазоне:
Задают угловой порог отпускания как:
αотп≈αторм,
где: αотп - угол отпускания СБ.
В процессе управления КА формируют сигнал рассогласования и выдают команду на вращение СБ в направлении уменьшения величины угла рассогласования между заданным и измеренным углами СБ, если угол между ними превышает порог срабатывания. Прекращают формирование сигнала рассогласования, при этом выдают команду на прекращение вращения СБ, если во время ее вращения величина угла рассогласования достигает величины менее порога отпускания, или равна 0°, или если знак угла рассогласования на момент начала вращения не совпадает со знаком рассогласования на момент окончания вращения и при этом угол рассогласования не превышает порога срабатывания.
При отсутствии сигнала отказа определяют заданный угол как угловое положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ.
Задают пороговое значение времени контроля вращения в диапазоне:
где τпв - пороговое значение времени контроля вращения.
При наличии сигнала рассогласования после выдачи команды на вращение СБ отсчитывают текущее время контроля, прекращают отсчет текущего времени контроля после выдачи команды на прекращение вращения. По истечении времени торможения, сбрасывают текущее время контроля в момент смены направления вращения и в момент пересечения границы между дискретными секторами датчика угла, формируют команду на прекращение вращения и сигнал отказа по управлению устройством поворота СБ при превышении текущим временем контроля указанного порогового значения времени контроля, то есть при:
tк>τпв, Uотк=1,
где: tк - текущее время контроля вращения;
Uотк - сигнал отказа по управлению устройства поворота СБ.
Дополнительно используют датчик фиксированного положения, формирующий сигналы установки нормали в фиксированные положения 0°, 90°, 180°, 270° относительно связанных с КА осей координат. Датчик формирует на выходе сигналы, соответствующие указанным фиксированным положениям, если отклонения нормали от указанных углов не превышают углов торможения СБ, таким образом, угловой сектор, в котором формируется фиксированное значение датчика угла, имеет величину:
σф≈2·αторм,
где: σф - сектор датчика фиксированного положения.
Задают время ожидания установки СБ в фиксированное положение:
где: τож - время ожидания установки СБ в фиксированное положение;
ωсб - установившаяся угловая скорость СБ.
При появлении сигнала отказа СБ новая заданная ориентация КА определяется следующим способом.
В момент появления сигнала отказа фиксируют положение КА относительно Солнца и запоминают заданный угол относительно связанной с КА системы координат (ССК), положение текущего единичного вектора направления на Солнце в инерциальная система координат (ИСК), а также кватернион и матрицу текущей ориентации КА в ИСК, то есть:
αзадз=αзад, eсиз=eси, qиз=qи, A1из=A1и,
где: αзадз - запомненное на момент отказа значение заданного угла СБ;
αзад - заданный угол СБ на момент отказа;
eсиз - запомненное значение единичного вектора направления на Солнце на момент отказа в ИСК;
eси - текущий единичный вектор направления на Солнце в ИСК.
qиз - запомненное значение кватерниона текущей ориентации КА в ИСК;
qи - значение кватерниона текущей ориентации КА в ИСК;
A1из - запомненное значение матрицы текущей ориентации КА на момент отказа в ИСК;
A1и - значение матрицы текущей ориентации КА в ИСК.
После этого формируют значение заданного угла, равное одному из ближайших к запомненному заданному углу, то есть:
αзад=0°, если 0°≤αзадз≤45° или 360°>αзадз>315°,
αзад=90°, если 45°<αзадз≤135°,
αзад=180°, если 135°<αзадз≤225°,
αзад=270°, если 225°<αзадз≤315°.
Затем начинают отсчет времени установки.
Отказы могут быть фиксированными или временными, вызванными влиянием внешних условий. Фиксированные отказы необратимы. Причинами фиксированных отказов устройства поворота СБ могут быть отказы, вызванные обрывом командных цепей управления вращением СБ, постоянным заклиниванием выходного вала электромеханического привода. Причинами временных отказов могут быть частичное одностороннее или временное заклинивание выходного вала электромеханического привода, вызванное временными причинами. Кроме того, возможен отказ или временный сбой дискретного датчика, вызванный, например статическими разрядами.
Контролируют угловое положение СБ по датчику фиксированного положения в момент превышения временем установки времени ожидания, то есть при:
ty≥τож
где: tу - текущее значение времени установки СБ в фиксированное положение.
В случае, если указанный сигнал от датчика фиксированного положения не соответствует заданному фиксированному углу, принимают значение углового положения СБ равное запомненному на момент отказа углу:
αзад=αзадз.
Осуществляют расчет положения вектора нормали к рабочей поверхности СБ в ССК. Например, в случае совпадения положения нормали к рабочей поверхности СБ с осью Y ССК и отсчета угла от оси Z вектор нормали к рабочей поверхности СБ в ССК может быть рассчитан по уравнению:

где eсбз - запомненный вектор нормали к рабочей поверхности СБ на момент отказа в ССК;
φсбз - запомненное угловое положение единичного вектора нормали к рабочей поверхности СБ на момент отказа относительно осей ССК;
T - обозначение операции транспонирования.
Рассчитывают положение вектора нормали к поверхности СБ в ИСК, соответствующего положению этого вектора нормали в ССК на момент отказа:

где eсбиз - вектор нормали к поверхности СБ на момент отказа в ИСК;
A1из - матрица текущей ориентации КА на момент отказа в ИСК.
Рассчитывают единичный вектор поворота КА:

где eп - единичный вектор поворота КА.
Определяют угол поворота КА в новое положение:

где φп - угол поворота КА в новое положение.
Рассчитывают кватернион поворота КА в новую ориентацию в ИСК:

где qп - кватернион поворота КА в новую ориентацию в ИСК;
eпX, eпY, eпZ - проекции единичного вектора нормали в ИСК.
Кватернион заданной ориентации КА в ИСК (4) рассчитывается как:

где: qк - кватернион заданной ориентации КА в ИСК;
q0 - кватернион начальной ориентации КА в ИСК;
о - произведение кватернионов.
После выполнения расчета по уравнению (6) кватернион заданной ориентации КА передается в систему стабилизации и ориентации, которая по алгоритмам производит разворот КА с использованием двигателей-маховиков или реактивных двигателей [1].
Предлагаемый способ позволяет увеличить живучесть КА за счет обеспечения возможности автоматического поддержания правильной ориентации рабочих поверхностей СБ относительно Солнца в случае возникновения отказа в системе управления ориентацией СБ.
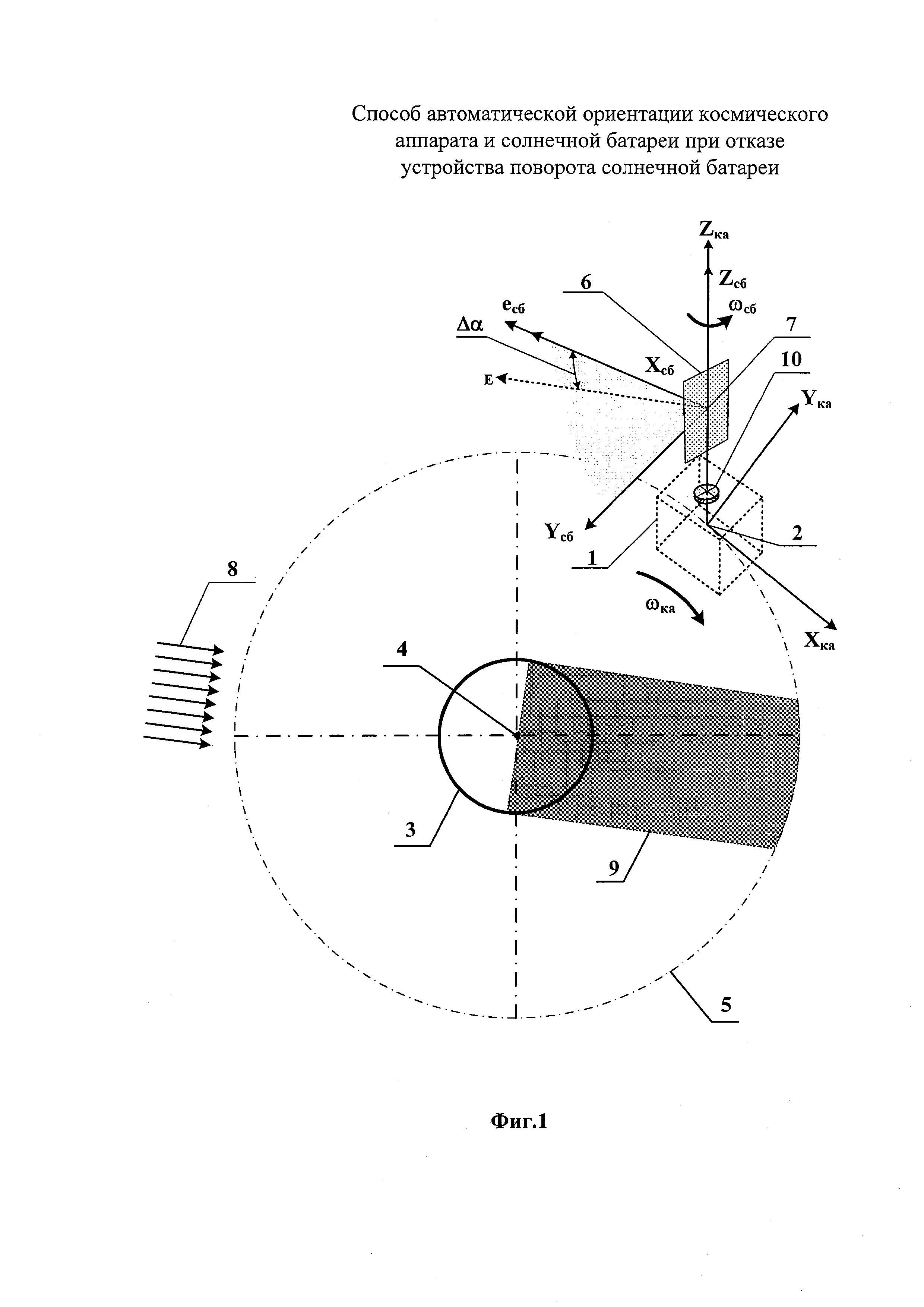
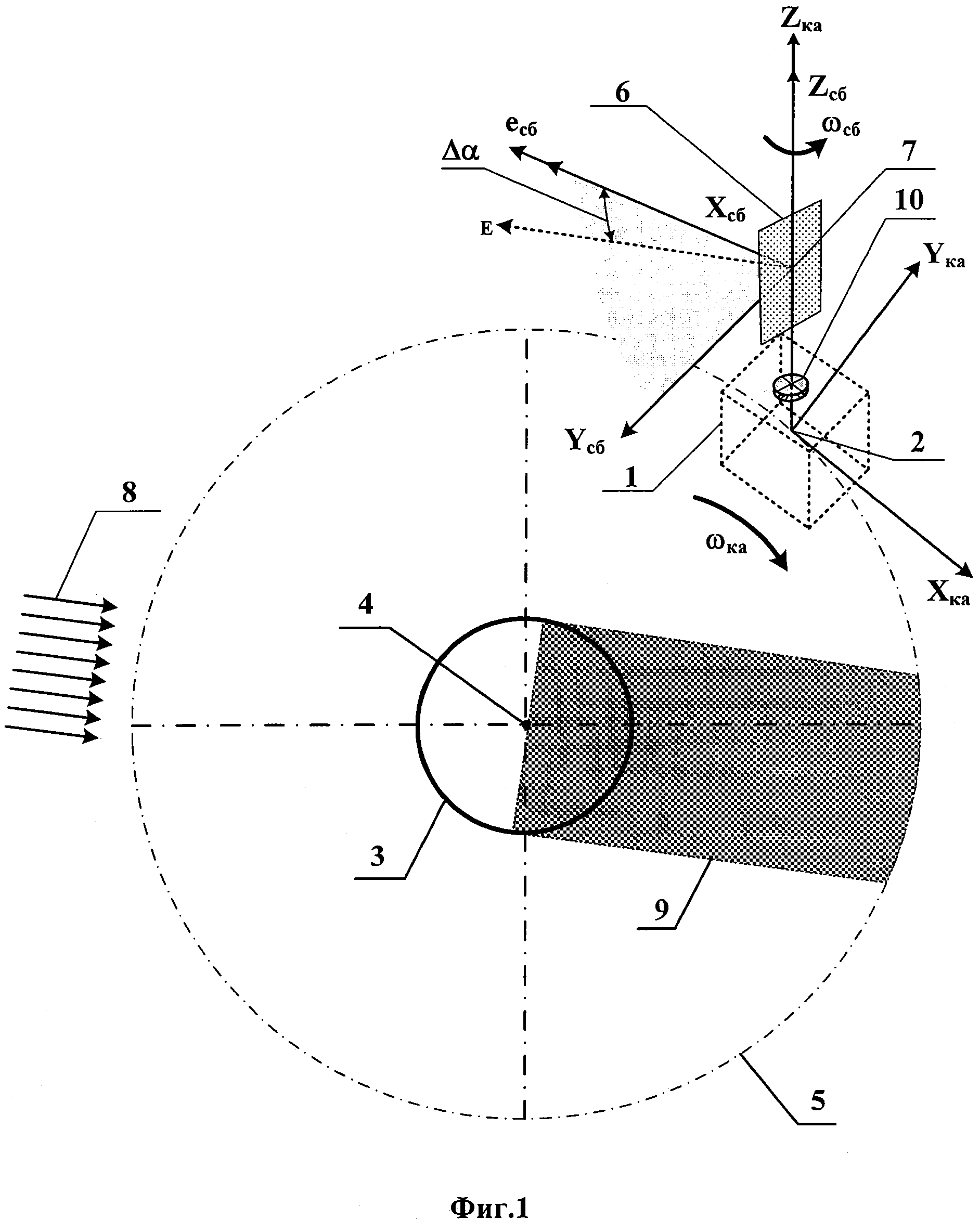
На фиг. 1 представлено положение КА на орбите планеты, где:
1 - корпус КА;
2 - центр масс КА;
3 - планета;
4 - центр масс планеты;
5 - орбита КА;
ωка - угловая скорость вращения КА по орбите относительно центра планеты;
Xка, Yкa, Zкa - оси связанной с КА системы координат;
6 - панель СБ;
Xсб, Yсб, Zсб - оси связанной с СБ системы координат;
7 - центр осей связанной с СБ системы координат;
E - проекция единичного вектора на плоскость вращения нормали к рабочей поверхности СБ;
eсб - нормаль к рабочей поверхности СБ;
8 - направление излучения от Солнца;
9 - теневой участок орбиты;
Δα - угол рассогласования между нормалью eсб и проекцией E;
ωсб - угловая скорость вращения СБ;
10 - датчики углового положения панели СБ.
На фиг. 1 представлен КА с корпусом 1 и центром масс 2, вращающийся вокруг планеты 3 с центром масс 4 по орбите 5 с угловой скоростью ωка. КА имеет связанную с ним систему осей координат Xка, Yкa, Zкa, совпадающей с положением орбитальной подвижной системы координат, начало которой находится в центре масс КА 2, ось Yкa (тангажа) направлена вдоль линии, соединяющей центр масс планеты 4 с центром масс КА 2 по направлению от планеты, ось Xка (крена) направлена в сторону движения КА, а ось Zкa (рыскания) дополняет систему осей КА до правой системы.
На КА установлена панель СБ 6, имеющая связанные оси координат Xсб, Ycб, Zcб с центром 7, причем ось вращения СБ Zcб совпадает с осью Zкa связанной с КА системы осей координат, ось Xсб, совпадает в направлением нормали к рабочей поверхности СБ есб, а при нулевом значении углового положения СБ оси Xсб, Yсб, Zсб совпадают с осями Xка, Yкa, Zкa.
Проекция Е единичного вектора на плоскость вращения нормали к рабочей поверхности СБ eсб направлена навстречу излучения Солнца 8, причем периодически КА попадает в теневой участок орбиты 9.
В процессе полета КА вращается вокруг планеты 3 по часовой стрелке с угловой скоростью ωка. При достижении угла рассогласования Δα между нормалью eсб и проекцией E более угла срабатывания, панель СБ 6 вращается вокруг оси Zcб с угловой скоростью ωСБ, превышающий на порядок и более угловую скорость КА ωка, и прекращает вращение при достижении угла отпускания, то есть при совмещения углового положения нормали eсб с проекцией E.
Угловое положение нормали к рабочей поверхности СБ eсб относительно оси Xка измеряют при помощи датчиков 10.
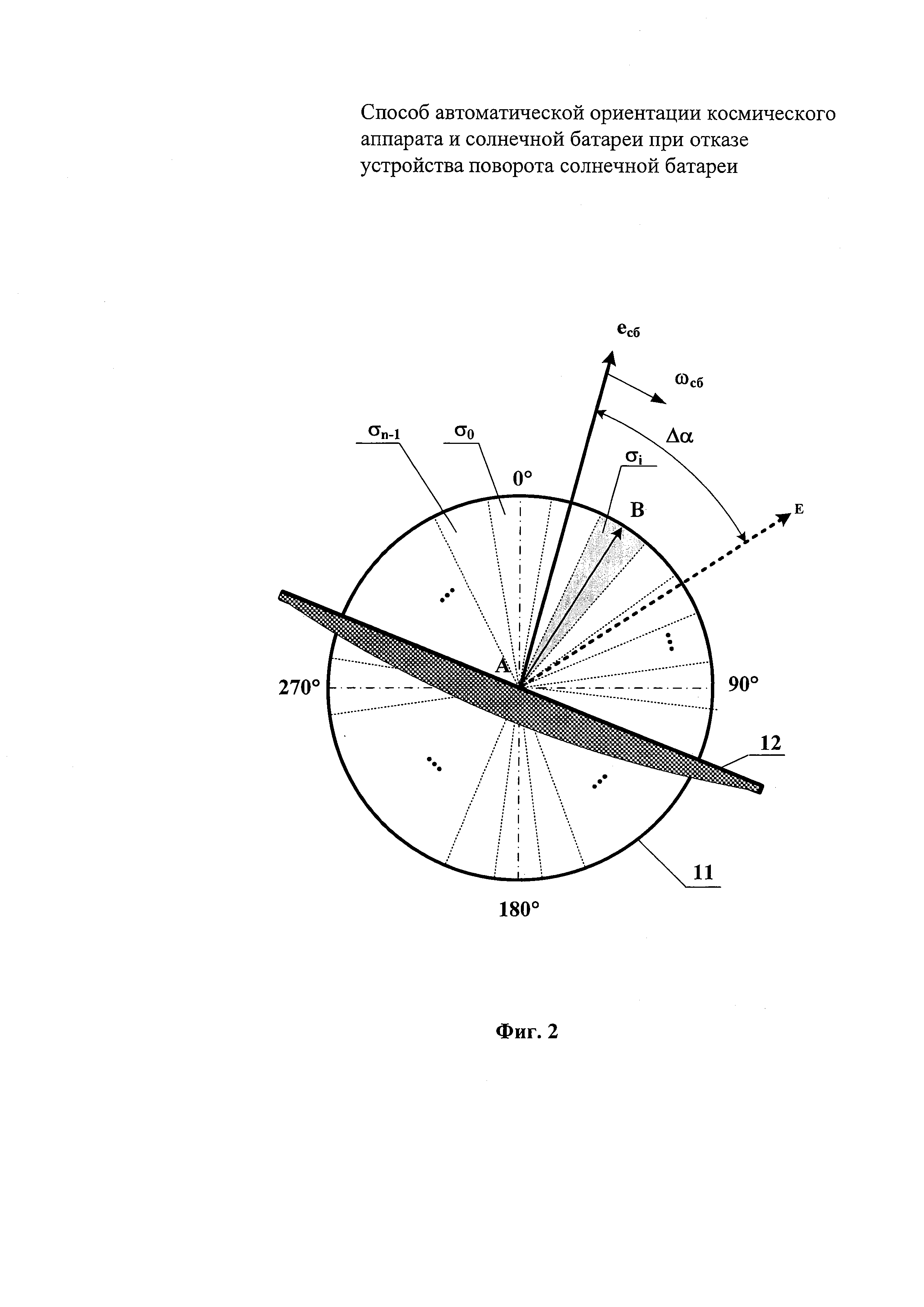
На фиг. 2 представлен круг дискретного сектора датчика угла, где:
eсб - нормаль к рабочей поверхности панели СБ;
12 - круг дискретного датчика угла;
11 - рабочая поверхность панели СБ;
σ0, …σi, …σn-1 - дискретные секторы датчика угла;
A - центр круга дискретного датчика угла;
AB - биссектриса дискретного сектора датчика угла;
E - проекция вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ;
Δα - угол рассогласования между нормалью eсб и проекцией E;
ωсб - угловая скорость вращения СБ.
На фиг. 2 представлен круг дискретного датчика угла 11, который разбит на n одинаковых дискретных секторов σ0, …σi, …σn-1 на выходе которого формируется информация об угловом положении нормали к рабочей поверхности СБ eсб относительно связанных с КА осей координат. При положении нормали eсб в границах i-того углового сектора σi, где 0≤i≤(n-1), датчик угла формирует угловое значение, соответствующее положению биссектрисы AB указанного сектора. В процессе управления ориентацией СБ при достижении угла рассогласования Δα между нормалью eсб и проекцией E более угла срабатывания, панель СБ 12 вращается с угловой скоростью ωсб по кратчайшему пути в направлении уменьшения указанного рассогласования и прекращает вращение при достижении угла отпускания, то есть при совпадения положения нормали eсб с проекцией E.
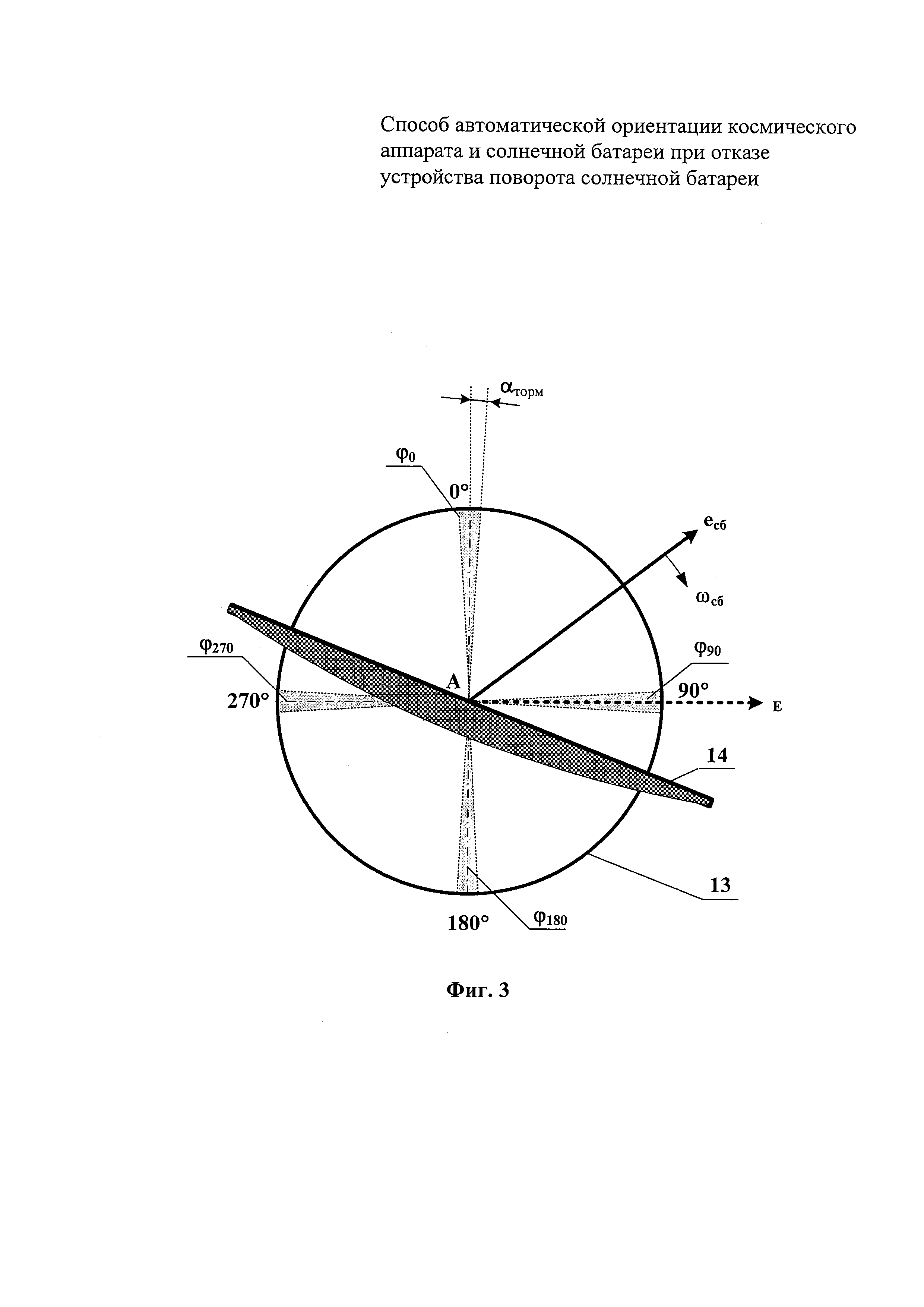
На фиг. 3 представлен датчик фиксированных положений СБ, где:
13 - круг вращения нормали к рабочей поверхности СБ;
A - центр круга датчика фиксированного положения;
14 - панель СБ;
eсб - положение нормали к рабочей поверхности СБ;
E - проекция вектора заданного направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ;
σф0, σф90, σф180, σф270 _ угловые сектора датчика фиксированного положения СБ;
ωсб - угловая скорость вращения СБ.
На фиг. 3 представлен круг датчика фиксированных положений СБ 13 с центром А, панель СБ 14, положение нормали к рабочей поверхности СБ eсб и положение проекции заданного направления на Солнце E, совпадающее с фиксированным положением 90°. Центр A круга вращения 13 совпадает с центром вращения панели СБ. Датчик угла формирует информацию относительно связанных с КА осей координат, соответствующую фиксированным угловым положениям 0°, 90°, 180°, 270°, если положение нормали eсб попадает в границы угловых секторов σф0, σф90, σф180, σф270, причем каждый из угловых секторов приблизительно равен удвоенному углу торможения СБ, а точным угловым положениям СБ 0°, 90°, 180°, 270° соответствуют положения биссектрис указанных секторов. Показано вращение панели СБ 14 с угловой скоростью ωсб в направлении угла 90°.
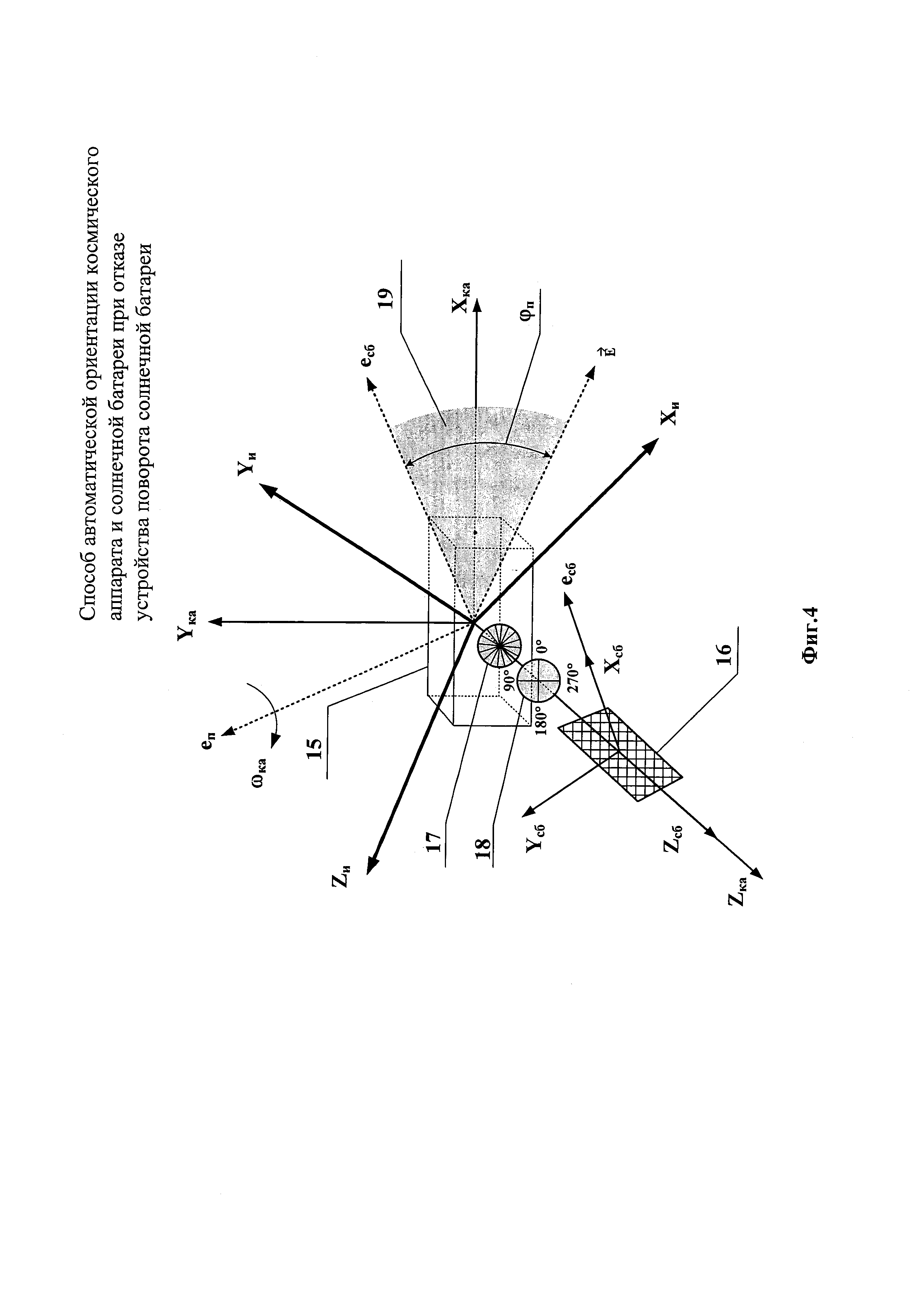
На фиг. 4 представлено изменение положения КА при отказе вращения СБ, где:
15 - корпус КА;
16 - панель СБ;
17 - дискретный датчик угла СБ;
18 - датчик фиксированных положений СБ;
19 - плоскость поворота КА;
Xка, Yкa, Zкa - оси связанной с КА системы координат,
Xсб, Ycб, Zcб - оси связанной с СБ системы координат,
Xиск, Yиск, Zиск - оси инерциальной системы координат,
Δα - угол рассогласования между положением нормали к рабочей поверхности СБ и единичным вектором направления на Солнце,
e - единичный вектор направления на Солнце;
eзад - вектор заданного направления СБ;
eсб - положение нормали к рабочей поверхности СБ.
ωка - направление угловой скорости КА при повороте.
На фиг. 4 показан КА с корпусом 15, имеющий оси связанной системы координат Xка, Yкa, Zкa. В свою очередь, ось Zcб связанной с СБ 16 системы координат Xсб, Ycб, Zcб, совпадает с осью Zкa. Нормаль к рабочей поверхности СБ есб совпадает с осью Xсб. С осью вращения СБ Xсб жестко связаны дискретный датчик угла 17 и датчик фиксированных положений 18. Ось Xиск инерциальной системы координат совпадает с единичный вектором е направления на Солнце, а вектор заданного направления СБ eзад совпадает с направлением вектора нормали к рабочей поверхности СБ eсб. Поворот КА осуществляется в плоскости 19 по минимальному углу рассогласования Δα между положениями вектора заданного направления СБ eзад, совпадающего с положением нормали к рабочей поверхности СБ, и проекцией единичного вектора направления на Солнце E.
Представленный способ автоматической ориентации рабочих поверхностей СБ при отказе устройства поворота СБ позволяет сохранить работоспособность, увеличить живучесть КА и таким образом продлить время его функционирования, так как несмотря на отказ обеспечивается бесперебойное снабжение его бортового оборудования вырабатываемой СБ электроэнергией. Кроме того, способ позволяет сэкономить запасы рабочих тел, например, запасы сжатого газа реактивных двигателей ориентации, заряд бортовых аккумуляторных батарей, так как при отказе его устройства поворота СБ разворот КА для ориентация рабочей поверхности СБ относительно направления на Солнце осуществляется с минимальными затратами, по минимальному углу рассогласования между нормалью к рабочей поверхности СБ и направлением на Солнце.
Источники информации
1. Бортовые системы управления космическими аппаратами. Под редакцией д.т.н, проф. А.С. Сырова. М., изд. МАИ-ПРИНТ, 2010, с. 93, 101, 219, 243.
2. Патент РФ 2428361, B64G 1/36, 07.07.2010 г.
3. Патент РФ 2356788, В64С 1/00, 28.12.2007 г.
4. Патент РФ 2368545, B64G 1/24, 10.07.2008 г.
Способ автоматической ориентации космического аппарата и солнечной батареи при отказе устройства поворота солнечной батареи, заключающийся в том, что измеряют текущее угловое положение солнечной батареи как направление нормали к ее рабочей поверхности с точностью до дискретного сектора датчика угла, одновременно определяют заданное направление, в случае рассогласования между заданным направлением и текущим угловым положением солнечной батареи формируют команды на вращение солнечной батареи по или против часовой стрелки относительно оси выходного вала устройства поворота солнечной батареи в направлении его уменьшения, а в случае отсутствия рассогласования формируют команды на прекращение вращения солнечной батареи, задают постоянную угловую скорость вращения выходного вала устройства поворота солнечной батареи, превышающую на порядок и более угловую скорость обращения космического аппарата вокруг Земли, определяют время и угол разгона солнечной батареи с момента выдачи команды на вращение до установившегося фиксированного значения угловой скорости солнечной батареи, определяют время и угол торможения солнечной батареи после момента выдачи команды на прекращение вращения до полной остановки солнечной батареи, задают угловой порог отпускания, задают угловой порог срабатывания, формируют сигнал рассогласования, если угол между заданным и текущим углами солнечной батареи превышает порог срабатывания, прекращают формирование сигнала рассогласования, если во время вращения солнечной батареи величина угла рассогласования достигает величины менее порога отпускания, или равна 0°, или если знак угла рассогласования на момент начала вращения не совпадает со знаком рассогласования на момент окончания вращения и при этом угол рассогласования не превышает порога срабатывания, задают пороговое значение времени контроля вращения, отсчитывают текущее время контроля после выдачи команды на вращение солнечной батареи, прекращают отсчет текущего времени контроля после выдачи команды на прекращение вращения, по истечении времени торможения сбрасывают текущее время контроля в момент смены направления вращения и в момент пересечения границы между дискретными секторами датчика угла, формируют команду на прекращение вращения и сигнал отказа по управлению устройством поворота солнечной батареи при превышении текущим временем контроля указанного порогового значения времени контроля, отличающийся тем, что задают угловой порог отпускания солнечной батареи как:α ≈ α,где α - угол отпускания солнечной батареи;α - угол торможения солнечной батареи,задают дискретным секторам датчика угла равные величины в диапазоне:(α+α)<σ<α,где α - угол разгона солнечной батареи;α - угол торможения солнечной батареи;σ - дискретный сектор датчика угла;α - порог срабатывания,задают величину углового порога срабатывания в диапазоне: где I - задаваемый минимально допустимый ток, вырабатываемый солнечной батареей;I - максимально возможный ток, вырабатываемый солнечной батареей,задают пороговое значение времени контроля вращения в диапазоне: где t - время разгона солнечной батареи;t - время торможения солнечной батареи;τ - пороговое значение времени контроля вращения;ω - установившаяся угловая скорость солнечной батареи,дополнительно используют датчик фиксированного положения, формирующий сигналы, соответствующие фиксированным угловым положениям 0°, 90°, 180°, 270°, если отклонение нормали от указанных положений не превышает угла торможения, задают значение времени ожидания установки солнечной батареи в фиксированное положение, в диапазоне: где τ - время ожидания установки солнечной батареи в фиксированное положение,при отсутствии сигнала отказа по управлению устройством поворота солнечной батареи определяют заданный угол как угловое положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности солнечной батареи, в момент появления сигнала отказа фиксируют положение космического аппарата относительно Солнца, присваивают заданному углу величину, равную ближайшему фиксированному углу 0°, 90°, 180° или 270°, и начинают отсчет времени установки, в момент достижения временем установки порогового значения прекращают управление вращением солнечной батареи, при этом, если датчик фиксированного положения формирует сигнал, соответствующий заданному углу, принимают значение углового положения нормали соответствующим указанному фиксированному углу, а если датчик фиксированного положения не формирует сигнал, соответствующий ближайшему фиксированному углу, то принимают значение углового положения нормали соответствующим значению соответствующего дискретного сектора датчика угла и разворачивают космический аппарат по кратчайшему пути до совмещения положения нормали с единичным вектором направления на Солнце.

Способ формирования цифроаналогового сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов и устройство для его осуществления
Система стабилизации углового движения космического аппарата
Способ повышения теплоотдачи и радиационной защиты электронных блоков
Способ формирования сигнала управления угловым движением нестационарного летательного аппарата и устройство для его осуществления
Способ функционального контроля и резервирования плат измерительного канала угловой скорости космического аппарата и устройство для его реализации
Способ формирования цифроаналогового адаптивного сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ формирования цифроаналогового адаптивного сигнала управления летательным аппаратом с переменной структурой и устройство для его осуществления
Способ формирования цифроаналогового сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата и устройство для его реализации
Способ ориентации космического аппарата и устройство для его реализации
Способ формирования цифроаналогового сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов и устройство для его осуществления
Система стабилизации углового движения космического аппарата
Способ повышения теплоотдачи и радиационной защиты электронных блоков
Способ формирования сигнала управления угловым движением нестационарного летательного аппарата и устройство для его осуществления
Способ функционального контроля и резервирования плат измерительного канала угловой скорости космического аппарата и устройство для его реализации
Способ формирования цифроаналогового адаптивного сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ формирования цифроаналогового адаптивного сигнала управления летательным аппаратом с переменной структурой и устройство для его осуществления
Способ формирования цифроаналогового сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата и устройство для его реализации
Способ ориентации космического аппарата и устройство для его реализации

