Результат интеллектуальной деятельности: СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ПО УГЛУ КРЕНА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к способам и системам автоматического управления, а именно к способам и системам управления ориентацией космических аппаратов (КА), подверженных действию координатно-параметрических возмущений [1]. В процессе ориентации КА при длительном их функционировании возможны случаи выхода из строя измерителей угла и угловой скорости, в качестве которых используются гироскопические измерители вектора угловой скорости (ГИВУС), астродатчики и другие измерители. В реальных системах ориентации используются комплексы измерителей.
Для ГИВУС характерен уход гироскопов и, как следствие, уменьшение точности измерений, а для астродатчиков - наличие помех в измерениях угла ориентации.
В случае использования для измерения угла ориентации астродатчика для получения угловой скорости, необходимой для построения устойчивой системы ориентации, требуется процедура дифференцирования угла ориентации. Очевидно, что точность получения угловой скорости мала.
Известен способ ориентации КА по углу крена [2], заключающийся в том, что формируют сигнал задания, измеряют угол крена и определяют сигнал ошибки.
Известно устройство для ориентации КА по углу крена, содержащее последовательно соединенные первый сумматор, первый усилитель, второй сумматор, третий сумматор, двигатель-маховик, четвертый сумматор, космический аппарат и астродатчик, выход которого соединен с первым входом первого сумматора через первый нормально замкнутый переключатель [2].
Недостаток известного способа ориентации и устройства для его реализации - малая точность ориентации КА.
С целью повышения точности способа ориентации КА по углу крена и устройства для его реализации способ ориентации КА по углу крена отличается тем, что определяют сигнал оценки угла крена, сигнал оценки угловой скорости, сигнал оценки ошибки, из сигнала ошибки и сигнала оценки угловой скорости формируют управление, из сигнала оценки ошибки и сигнала оценки угловой скорости формируют сигнал оценки управления, определяют первый сигнал разности сигнала оценки управления и сигнала управления, суммируют сигнал управления и интеграл первого сигнала разности, определяют второй сигнал разности оценки угла крена и угла крена, запоминают первый сигнал коррекции
и суммируют его с сигналом оценки ошибки, запоминают второй сигнал коррекции

где ε(t-h) - второй сигнал разности; h - время чистого запаздывания, и суммируют его после отказа астродатчика с оценкой сигнала ошибки, а также суммируют сигнал оценки угла крена с сигналом ошибки.
Отличие устройства ориентации КА по углу крена заключается в том, что оно дополнительно содержит десять сумматоров, четыре усилителя, пять интеграторов, три нормально разомкнутых переключателя, пять нормально замкнутых переключателей, четыре блока памяти, два блока чистого запаздывания, второй вход первого сумматора через последовательно соединенные второй сумматор, второй усилитель, пятый сумматор, шестой сумматор, первый интегратор, седьмой сумматор, второй интегратор, восьмой сумматор, третий интегратор, девятый сумматор, второй нормально замкнутый переключатель, четвертый интегратор, десятый сумматор, третий нормально замкнутый переключатель, первый блок памяти и четвертый нормально замкнутый переключатель подключен ко второму входу второго сумматора, выход третьего нормально замкнутого переключателя через последовательно соединенные первый блок чистого запаздывания, пятый нормально замкнутый переключатель, второй блок памяти и первый нормально разомкнутый переключатель соединен с третьим входом второго сумматора, выход второго нормально замкнутого переключателя соединен со вторым входом десятого сумматора, через последовательно соединенные второй блок чистого запаздывания, шестой нормально замкнутый переключатель, третий блок памяти, второй нормально разомкнутый переключатель, третий усилитель - со вторым входом седьмого сумматора, а через последовательно соединенные четвертый блок памяти и шестой нормально замкнутый переключатель - с входом третьего усилителя и вторым входом восьмого сумматора, выход седьмого сумматора через четвертый усилитель соединен со вторым входом шестого сумматора, выход восьмого сумматора через пятый усилитель соединен со вторыми входами второго и пятого сумматоров, выход третьего интегратора соединен с четвертым входом второго сумматора, а через третий нормально разомкнутый переключатель - с третьим входом первого сумматора, выход пятого сумматора через последовательно соединенные одиннадцатый сумматор и пятый интегратор соединен со вторым входом третьего сумматора, вход которого соединен со вторым входом одиннадцатого сумматора, а выход астродатчика соединен со вторым входом девятого сумматора.
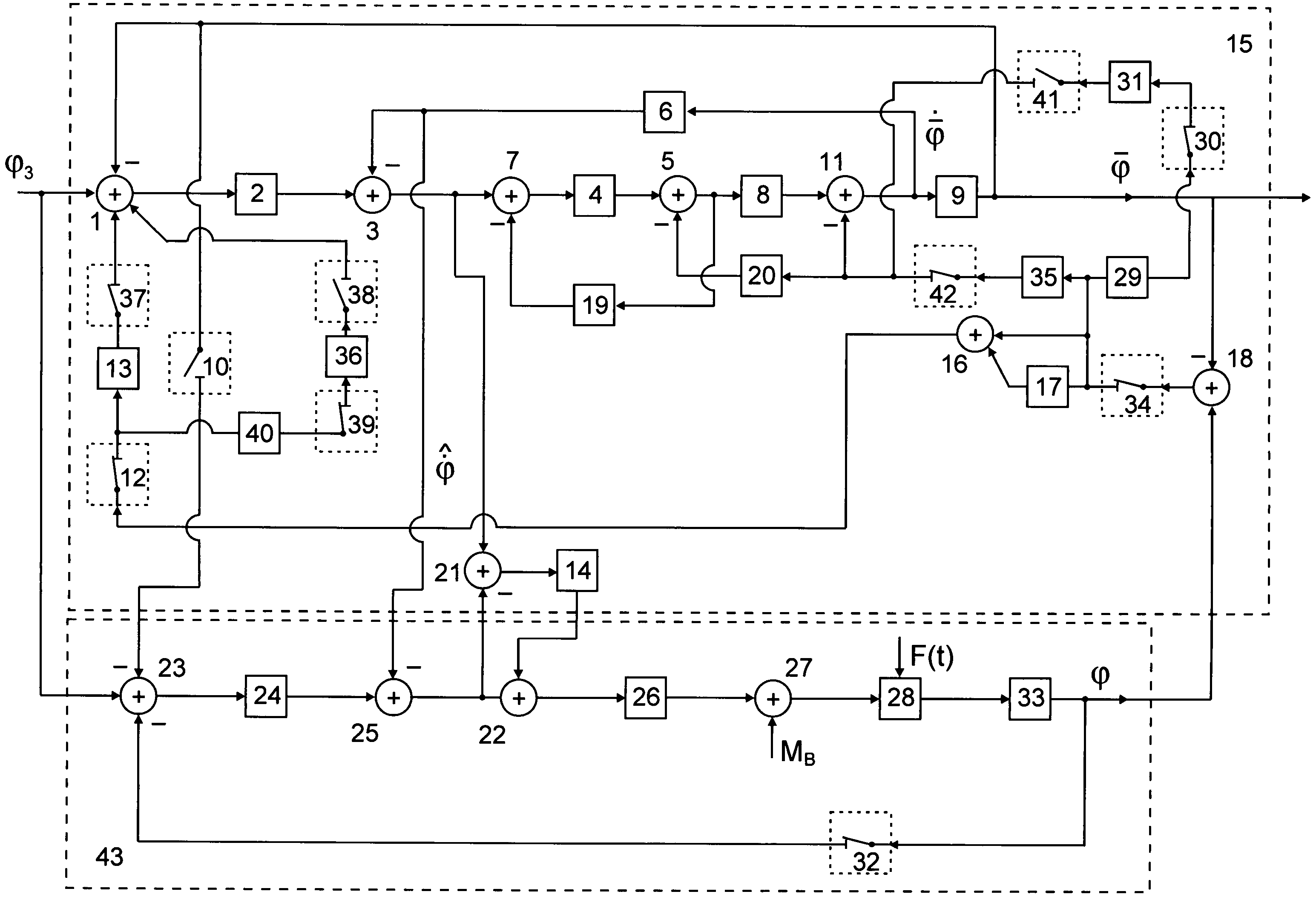
На чертеже изображено устройство ориентации КА, реализующее предложенный способ, где приняты следующие обозначения:
1 - второй сумматор
2 - второй усилитель
3 - пятый сумматор
4 - первый интегратор
5 - седьмой сумматор
6 - пятый усилитель
7 - шестой сумматор
8 - второй интегратор
9 - третий интегратор
10 - третий нормально разомкнутый переключатель
11 - восьмой сумматор
12 - третий нормально замкнутый переключатель
13 - первый блок памяти
14 - пятый интегратор
15 - модель основного контура ориентации (МОКО)
16 - десятый сумматор
17 - четвертый интегратор
18 - девятый сумматор
19 - четвертый усилитель
20 - третий усилитель
21 - одиннадцатый сумматор
22 - третий сумматор
23 - первый сумматор
24 - первый усилитель
25 - одиннадцатый сумматор
26 - двигатель-маховик
27 - четвертый сумматор
28 - космический аппарат (КА)
29 - второй блок чистого запаздывания;
30 - шестой нормально замкнутый переключатель
31 - третий блок памяти
32 - первый нормально-замкнутый переключатель
33 - астродатчик
34 - второй нормально замкнутый переключатель
35 - четвертый блок памяти
36 - второй блок памяти
37 - четвертый нормально замкнутый переключатель
38 - первый нормально разомкнутый переключатель
39 - пятый нормально замкнутый переключатель
40 - первый блок чистого запаздывания
41 - второй нормально разомкнутый переключатель
42 - шестой нормально замкнутый переключатель
43 - основной контур ориентации (ОКО)
В работе рассматриваются способ и случай построения устройства для ориентации КА при отсутствии датчика угловой скорости  .
.
Устройство для реализации способа ориентации КА функционирует следующим образом.
Входной сигнал задания φЗ поступает на входы первого сумматора 23 ОКО 43 и второго сумматора 1 математической модели ОКО 15. С выхода КА 28 с помощью астродатчика 33 снимается сигнал крена φ, который сравнивается в первом сумматоре 23 с сигналом задания φЗ. Разностный сигнал φЗ-φ в виде ошибки ОКО 43 усиливается первым усилителем 24, а на выходе второго сумматора формируется управление U(t), которое корректируется сигналом ΔU(t) с выхода пятого интегратора 14. С выхода третьего сумматора 22 получается скорректированное управление U(t)+ΔU/(t), которое и поступает на вход двигателя-маховика 26.
На входы КА 28 поступают мультипликативная помеха F(t) и возмущающий момент Мв с выхода четвертого сумматора 27.
Наличие в ОКО 43 обратной связи только по углу крена φ(t) не может обеспечить устойчивость ОКО 43. Для устойчивости необходимо охватить КА 28 отрицательной обратной связью по угловой скорости
[2]. Датчик угловой скорости
в системе отсутствует. Получение угловой скорости
путем дифференцирования сигнала угла крена φ(t) приведет к большой ошибке измерения
, т.к. сигнал φ(t) с выхода астродатчика 33 измеряется с высокочастотной помехой, которая при дифференцировании будет искажать полезную составляющую в сигнале
.
Чтобы избежать большой ошибки в определении угловой скорости
, строится параллельно ОКО 43 математическая модель ОКО 15, которая является устойчивой и состоит из последовательно соединенных второго сумматора 1, второго усилителя 2, пятого сумматора 3, шестого сумматора 7, первого интегратора 4, седьмого сумматора 5, второго интегратора 8, восьмого сумматора 11 и третьего интегратора 9.
Математическая модель ОКО 15 имеет отрицательную обратную связь по оценке угла крена  и через пятый усилитель 6 - по оценке угловой скорости
и через пятый усилитель 6 - по оценке угловой скорости  которые обеспечивают устойчивость математической модели ОКО 15.
которые обеспечивают устойчивость математической модели ОКО 15.
Такое построение математической модели ОКО 15 позволяет, используя оценку ,
обеспечить и устойчивость ОКО 43. Для этого на один из входов одиннадцатого сумматора 25 в виде отрицательной обратной связи подается через пятый усилитель оценка угловой скорости 
При этом в математической модели ОКО 15 КА 28 моделируется путем установки второго 8 и третьего 9 интеграторов, а двигатель-маховик - шестого сумматора 7, первого интегратора 4 и четвертого усилителя 19. Оценка управления  на выходе пятого сумматора 3 будет отличаться от управления U(t) ОКО 43, т.к. на последний действуют помехи F(t) и MB(t), а на математическую модель они не действуют.
на выходе пятого сумматора 3 будет отличаться от управления U(t) ОКО 43, т.к. на последний действуют помехи F(t) и MB(t), а на математическую модель они не действуют.
Для исключения действия внешней помехи MB(t) на ОКО 43 на выходе одиннадцатого сумматора ищется разность  и после интегрирования этой разности на выходе пятого интегратора 14 получается сигнал ΔU(t), который компенсирует действие помехи MB(t) на ОКО 43, при условии, что F(t)≠0.
и после интегрирования этой разности на выходе пятого интегратора 14 получается сигнал ΔU(t), который компенсирует действие помехи MB(t) на ОКО 43, при условии, что F(t)≠0.
В общем случае F(t) Ф 0. Для компенсации действия F(t) на параметры КА 28 формируется сигнал коррекции UК(t) с использованием метода покомпонентного формирования управлений (МПФУ) [3] в виде
где 
Для формирования сигнала Uк(t) при определении сигналов  и
и  требуется информация об угловом ускорении
требуется информация об угловом ускорении  и угловой скорости
и угловой скорости  . Однако датчики углового ускорения
. Однако датчики углового ускорения  и угловой скорости
и угловой скорости  в ОКО 43 отсутствуют - имеется только датчик угла крена φ(t).
в ОКО 43 отсутствуют - имеется только датчик угла крена φ(t).
Реализовать сигнал Uк(t) можно, если использовать эквивалентные преобразования структурных схем и перенести эквивалентным образом составляющую  за первый интегратор 4 и просуммировать ее с выходом первого интегратора в седьмом сумматоре 5. Аналогично можно поступить и с составляющей
, просуммировав ее в восьмом сумматоре 11 на выходе второго интегратора 8.
за первый интегратор 4 и просуммировать ее с выходом первого интегратора в седьмом сумматоре 5. Аналогично можно поступить и с составляющей
, просуммировав ее в восьмом сумматоре 11 на выходе второго интегратора 8.
Таким образом получим три составляющие Uк1(t):
первая  из которых реализована с помощью девятого сумматора 18, второго нормально замкнутого переключателя 34, четвертого интегратора 17, десятого сумматора 16, третьего нормально замкнутого переключателя 12, первого блока памяти 13, четвертого нормально замкнутого переключателя 37 и второго сумматора 1.
из которых реализована с помощью девятого сумматора 18, второго нормально замкнутого переключателя 34, четвертого интегратора 17, десятого сумматора 16, третьего нормально замкнутого переключателя 12, первого блока памяти 13, четвертого нормально замкнутого переключателя 37 и второго сумматора 1.
Вторая составляющая  реализована соединением девятого сумматора 18, второго нормально замкнутого переключателя 34, третьего блока памяти 35, шестого нормально замкнутого переключателя 42 и восьмого сумматора 11, а третья составляющая
реализована соединением девятого сумматора 18, второго нормально замкнутого переключателя 34, третьего блока памяти 35, шестого нормально замкнутого переключателя 42 и восьмого сумматора 11, а третья составляющая  - дополнительным соединением выхода шестого нормально-замкнутого переключателя 42 через третий усилитель со вторым входом седьмого сумматора 5.
- дополнительным соединением выхода шестого нормально-замкнутого переключателя 42 через третий усилитель со вторым входом седьмого сумматора 5.
Если положение переключателей такое, какое изображено на чертеже, то устройство ориентации КА 28 функционирует устойчиво при наличии только одного измерителя угла крена φ(t) - астродатчика 33.
При замене астродатчика 33 в момент времени t1 нормально замкнутые переключатели 12, 32 и 34 размыкаются, а нормально разомкнутый переключатель 10 замыкается. При этом первый блок памяти 13 запоминает последнее значение сигнала  , четвертый блок памяти 35 - сигнал ε(t1), а на входы седьмого сумматора 5 и восьмого сумматора 11 - соответственно
, четвертый блок памяти 35 - сигнал ε(t1), а на входы седьмого сумматора 5 и восьмого сумматора 11 - соответственно  и
и  . Для стабилизации ОКО 43 используется вместо сигнала φ(t) с выхода астродатчика 33 сигнал оценки
. Для стабилизации ОКО 43 используется вместо сигнала φ(t) с выхода астродатчика 33 сигнал оценки  . Кроме того, на выходах второго блока памяти 36 появляется сигнал
. Кроме того, на выходах второго блока памяти 36 появляется сигнал  , на выходе третьего блока памяти 31 - сигнал ε(t1), на выходе пятого интегратора 14 - сигнал ΔU(t).
, на выходе третьего блока памяти 31 - сигнал ε(t1), на выходе пятого интегратора 14 - сигнал ΔU(t).
Если по какой-либо причине в момент времени t1 астродатчик был неисправен, то размыкают переключатели 37, 39, 30 и 42 и замыкают переключатели 38 и 41, чтобы использовать предыдущие моменту времени t1 сигналы  ,
,  ,
,  , задержанные на время чистого запаздывания h=const>0 в первом блоке чистого запаздывания 40 и втором блоке чистого запаздывания 29. Таким образом,
, задержанные на время чистого запаздывания h=const>0 в первом блоке чистого запаздывания 40 и втором блоке чистого запаздывания 29. Таким образом,
Цепи анализа достоверности измерения угла крена φ(t) астродатчиком 33 и схемы формирования команд на переключения на чертеже отсутствуют.
Практика использования систем ориентации КА показывает, что приблизительно через 5-10 минут необходимо подключать в схему исправный астродатчик, чтобы обновлять составляющие сигнала Uк(t).
Таким образом, такое построение устройства ориентации КА по углу крена φ(t), реализующее заявленный способ ориентации, позволяет обеспечить технический результат по повышению точности ориентации КА и повышения надежности функционирования при выходе из строя астродатчика.
Изобретательский уровень предложенного технического решения подтверждает отличительная часть формулы изобретения на способ и устройство для его реализации.
Литература
1. Принципы построения и проектирования самонастраивающихся систем управления, Петров Б.Н., Рутковский В.Ю., Крутова И.Н., Земляков С.Д. - М.: Машиностроение, 1972, 260 с.
2. Васильев В.Н. Системы ориентации космических аппаратов / В.Н. Васильев. - М: ФГУП «НЛП ВНИИЭМ», 2009. С.149-156 (прототип).
3. Лащев А.Я. Метод синтеза адаптивных систем управления с эталонной моделью. Приборы и системы. Управление, контроль, диагностика. 2007. №1. С.2-6.

Способ формирования цифроаналогового сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов и устройство для его осуществления
Система стабилизации углового движения космического аппарата
Способ повышения теплоотдачи и радиационной защиты электронных блоков
Способ формирования сигнала управления угловым движением нестационарного летательного аппарата и устройство для его осуществления
Способ функционального контроля и резервирования плат измерительного канала угловой скорости космического аппарата и устройство для его реализации
Способ формирования цифроаналогового адаптивного сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ формирования цифроаналогового адаптивного сигнала управления летательным аппаратом с переменной структурой и устройство для его осуществления
Способ формирования цифроаналогового сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата и устройство для его реализации
Способ формирования сигнала управления газогидравлическим рулевым приводом и устройство для его реализации
Способ формирования цифроаналогового сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов и устройство для его осуществления
Система стабилизации углового движения космического аппарата
Способ повышения теплоотдачи и радиационной защиты электронных блоков
Способ формирования сигнала управления угловым движением нестационарного летательного аппарата и устройство для его осуществления
Способ функционального контроля и резервирования плат измерительного канала угловой скорости космического аппарата и устройство для его реализации
Способ формирования цифроаналогового адаптивного сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ формирования цифроаналогового адаптивного сигнала управления летательным аппаратом с переменной структурой и устройство для его осуществления
Способ формирования цифроаналогового сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата и устройство для его реализации
Способ формирования сигнала управления газогидравлическим рулевым приводом и устройство для его реализации

