Результат интеллектуальной деятельности: МНОГОРЕЖИМНОЕ ЦИФРОАНАЛОГОВОЕ УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ПО ТАНГАЖУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к бортовым цифроаналоговым устройствам для систем автоматического управления существенно нестационарными беспилотными летательными аппаратами (БЛА) с реализацией сложных траекторий.
Известно устройство для систем автоматического управления БЛА, в котором содержится блок задающего воздействия, блок сравнения, суммирующий усилитель, датчики состояния [1].
Недостатком известного устройства управления является ограниченность функциональных возможностей в условиях значительной нестационарности параметров БЛА, вызванных изменениями скорости и высоты полета БЛА, а также техническими ограничениями, что особенно характерно для управления по тангажу при интенсивных вертикальных маневрах БЛА.
Наиболее близким устройством является устройство формирования сигнала управления БЛА, содержащее последовательно соединенные задатчик угла, первый блок сравнения, первый блок умножения и первый сумматор, датчик угла, выход которого соединен со вторым входом первого блока сравнения, последовательно соединенные датчик угловой скорости и второй блок умножения, выход которого соединен со вторым входом первого сумматора, последовательно соединенные датчик скоростного напора и блок деления и первый задатчик опорного сигнала, выход которого соединен со вторым входом блока деления [2].
Недостатками известного устройства являются ограниченные функциональные возможности в условиях нестационарности ЛА, обусловленной существенным изменением скорости и высоты при реализации сложных траекторий, например при интенсивных маневрах в продольной плоскости.
Решаемой в предложенном устройстве технической задачей является повышение точностных характеристик управления и расширение функциональных возможностей с точки зрения сочетания режимов управления при многофакторных условиях полета. К ним следует отнести: режим набора управляющего сигнала по тангажу ϑy, на котором проявляются динамические свойства управления с факторами существенных нелинейностей - например, возбуждение автоколебаний «в большом»; режим стабилизации при высоком уровне ϑy=const, при котором характерным являются динамические свойства управления «в малом»; режим доводки траекторных параметров по высоте H(t) и скорости полета V(t) до соответствующих конечных значений Hk и Vk с минимизацией рассогласования по тангажу АО. Неотъемлемой составной частью структурно-динамического синтеза контура угловой стабилизации по тангажу - устройства управления - является учет существенной нестационарности БЛА по аэродинамическим (АДХ) и инерционно-массовым и центровочным характеристикам (ИМЦХ) и разбросов их параметров; учет факторов упругости объекта. Эти обстоятельства определяют необходимость в первую очередь в средствах адаптации параметров устройства управления, т.е. в формировании режима адаптации. Предложенным построением обеспечивается адаптация параметров устройства и функционально-логическое их изменение, что обеспечивает повышение устойчивости и качества процессов в целом в условиях широкого диапазона параметров БЛА. В целом, в устройстве содержится сочетание традиционного уровня построения систем управления БЛА с нестандартным решением.
Указанный технический результат достигается тем, что в известное устройство, содержащее последовательно соединенные задатчик угла, первый блок сравнения, первый блок умножения и первый сумматор, датчик угла, выход которого соединен со вторым входом первого блока сравнения, последовательно соединенные датчик угловой скорости и второй блок умножения, выход которого соединен со вторым входом первого сумматора, последовательно соединенные датчик скоростного напора и блок деления и первый задатчик опорного сигнала, выход которого соединен со вторым входом блока деления, дополнительно введены последовательно соединенные второй задатчик опорного сигнала, второй блок сравнения, второй вход которого соединен с выходом датчика скоростного напора, управляемый переключатель, второй вход которого соединен с выходом блока деления, первый масштабный усилитель, второй сумматор и первый цифроаналоговый преобразователь, выход которого соединен со вторым входом первого блока умножения, второй масштабный усилитель, вход которого соединен со вторым выходом управляемого переключателя, а выход - со вторым входом второго сумматора, последовательно соединенные третий задатчик опорного сигнала, третий блок сравнения, второй вход которого соединен с выходом датчика скоростного напора, логический элемент «И», управляемый ключ, второй вход которого соединен с выходом блока деления, и третий масштабный усилитель, выход которого соединен с третьим входом второго сумматора, последовательно соединенные дифференцирующее звено, вход которого соединен с выходом датчика скоростного напора, и блок выделения сигнала отрицательной полярности, выход которого соединен со вторым входом логического элемента «И», последовательно соединенные четвертый масштабный усилитель, вход которого соединен с первым выходом управляемого переключателя, третий сумматор и второй цифроаналоговый преобразователь, выход которого соединен со вторым входом второго блока умножения, пятый масштабный усилитель, вход которого соединен со вторым выходом управляемого переключателя, а выход - со вторым входом третьего сумматора, и последовательно соединенные шестой масштабный усилитель, вход которого соединен с выходом блока деления, третий цифроаналоговый преобразователь, противоизгибный фильтр, второй вход которого соединен с выходом первого сумматора, и ограничитель сигнала, выход которого является выходом устройства.
Действительно, при этом обеспечивается отработка сигналов управления с максимальным качеством в широком диапазоне изменения высоты и скорости полета БЛА.
На чертеже представлена блок-схема многорежимного цифроаналогового устройства управления угловым движением по тангажу беспилотного летательного аппарата.
Устройство содержит последовательно соединенные задатчик угла 1 (ЗУ), первый блок сравнения 2 (1БС), первый блок умножения 3 (1БУ) и первый сумматор 4 (1С), датчик угла 5 (ДУ), выход которого соединен со вторым входом первого блока сравнения 2, последовательно соединенные датчик угловой скорости 6 (ДУС) и второй блок умножения 7 (2БУ), выход которого соединен со вторым входом первого сумматора 4, последовательно соединенные датчик скоростного напора 8 (ДСН) и блок деления 9 (БД), первый задатчик опорного сигнала 10 (1ЗОС), выход которого соединен со вторым входом блока деления 9, последовательно соединенные второй задатчик опорного сигнала 11 (2ЗОС), второй блок сравнения 12 (2БС), второй вход которого соединен с выходом датчика скоростного напора 8, управляемый переключатель 13 (УП), второй вход которого соединен с выходом блока деления 9, первый масштабный усилитель 14 (1МУ), второй сумматор 15 (2С) и первый цифроаналоговый преобразователь 16 (1ЦАП), выход которого соединен со вторым входом первого блока умножения 3, второй масштабный усилитель 17 (2МУ), вход которого соединен со вторым выходом управляемого переключателя 13, а выход - со вторым входом второго сумматора 15, последовательно соединенные третий задатчик опорного сигнала 18 (3ЗОС), третий блок сравнения 19 (ЗБС), второй вход которого соединен с выходом датчика скоростного напора 8, логический элемент «И» 20 (ЛЭ «И»), управляемый ключ 21 (УК), второй вход которого соединен с выходом блока деления 9, и третий масштабный усилитель 22 (3МУ), выход которого соединен с третьим входом второго сумматора 15, последовательно соединенные дифференцирующее звено 23 (ДЗ), вход которого соединен с выходом датчика скоростного напора 8, и блок выделения сигнала отрицательной полярности 24 (БВСОП), выход которого соединен со вторым входом логического элемента «И» 20, последовательно соединенные четвертый масштабный усилитель 25 (4МУ), вход которого соединен с первым выходом управляемого переключателя 13, третий сумматор 26 (3С) и второй цифроаналоговый преобразователь 27 (2ЦАП), выход которого соединен со вторым входом второго блока умножения 7, пятый масштабный усилитель 28 (5МУ), вход которого соединен со вторым выходом управляемого переключателя 13, а выход - со вторым входом третьего сумматора 26, и последовательно соединенные шестой масштабный усилитель 29 (6МУ), вход которого соединен с выходом блока деления 9, третий цифроаналоговый преобразователь 30 (3ЦАП), противоизгибный фильтр 31 (ПИФ), второй вход которого соединен с выходом первого сумматора 4, и ограничитель сигнала 32 (ОС), выход которого является выходом устройства.
На чертеже цифровая, цифроаналоговая и аналоговая части выделены пунктиром.
Устройство функционирует следующим образом.
Основные каналы сформированы на базе аналоговых звеньев. Сигналы управления по тангажу ϑy от задатчика 1 и текущего углового положения & от датчика 5 поступают на блок сравнения 2, с выхода которого сигнал рассогласования Δϑ

поступает на первый блок умножения 3. Блок 3 формирует компоненту сигнала управления по рассогласованию

где K1 - адаптивно перестраиваемый передаточный коэффициент, поступающий в виде сигнала с блока 16.
Компонента сигнала управления σ2 по угловой скорости формируется в блоке умножения 7:

где ωz - сигнал угловой скорости по тангажу, получаемый от датчика 6;
K2 - адаптивно перестраиваемый передаточный коэффициент по угловой скорости, поступающий в виде сигнала с блока 27.
В сумматоре 4 компоненты сигнала управления σ1 и σ2 суммируются, формируя сигнал σ3:

Противоизгибный фильтр 31 с перестраиваемой постоянной времени Тф, поступающей в виде сигнала с блока 30, формирует сигнал σ4, который ограничивается ограничителем сигнала 32, сигнал с выхода которого σвых является выходным сигналом управления устройства. Ограниченный выходной сигнал управления по тангажу σвых подается в дальнейшем на рулевой привод (РП) БЛА, используемый и для смежных каналов бортовой системы управления (по курсу и крену, здесь не рассматриваемых).
Наиболее обобщенной и доминирующей характеристикой, идентифицирующей нестационарность параметров БЛА в полете, является сигнал скоростного напора q, являющийся параметрическим воздействием для адаптации перестраиваемых параметров. А именно, по функциям адаптации перестраиваются передаточные коэффициенты и постоянная времени противоизгибного фильтра канала управления БЛА. Эти параметры формируются по функциям адаптации в виде гиперболических зависимостей для рабочего диапазона q от qmin до qmax в виде:

где Ai=const - опорные значения сигнала функции адаптации передаточных чисел K1 блока 3 и K2 блока 7;
T0=const - опорное значение функции адаптации постоянной времени Тф противоизгибного фильтра 31.
Значения Ai и T0 определены на основе базовой функции адаптации в блоке деления 9:
где A - опорное значение, получаемое от первого задатчика 10, q - текущее значение сигнала скоростного напора, получаемого от датчика 8.
Реализация значений передаточных коэффициентов K1 и K2 составляет:
- при q≤q01=qmin передаточные коэффициенты максимальны (режим набора высоты - большие значения угла тангажа). Управляемый переключатель 13 замкнут выходом на первый и четвертый масштабные усилители 14 и 25 соответственно;
- при q>q01 передаточные числа K1 и K2 уменьшаются с ростом q по (5), определяя исключение больших значений амплитуды автоколебаний, при этом Δq1>0:

переключатель 13 замыкает цепь коэффициента К от блока деления 9 на второй 17 и пятый 28 масштабные усилители соответственно. Сигнал q01 формируется вторым задатчиком опорного сигнала 11; Δq1 - вторым блоком сравнения 12.
Для диапазона значений q в пределах (q01-q02), q01≤q≤q02<qmax коэффициенты K1 и K2 с ростом q уменьшаются, определяя увеличение рассогласования Δϑ. С целью уменьшения Δϑ при q≥q01 и q≤q02 и при  блоками 23, 24, 18, 19, 20 формируется сигнал на замыкание ключа 21. При этом к коэффициенту K1 по рассогласованию вводится добавочный коэффициент ΔK1 через третий масштабный усилитель 22. Этот режим имеет место на конечном интервале полета БЛА с достижением конечной максимальной высоты Hk, при котором имеет место уменьшение скоростного напора q, определяемое
, с реализацией на звеньях 23, 24, 18, 19, 20.
блоками 23, 24, 18, 19, 20 формируется сигнал на замыкание ключа 21. При этом к коэффициенту K1 по рассогласованию вводится добавочный коэффициент ΔK1 через третий масштабный усилитель 22. Этот режим имеет место на конечном интервале полета БЛА с достижением конечной максимальной высоты Hk, при котором имеет место уменьшение скоростного напора q, определяемое
, с реализацией на звеньях 23, 24, 18, 19, 20.
Во втором сумматоре 15 суммируются сигналы коэффициентов по рассогласованию от блоков 14, 17, 22; результирующий сигнал через первый цифроаналоговый преобразователь 16 поступает в первый блок умножения 3 в виде сигнала K1.
В третьем сумматоре 26 суммируются сигналы коэффициентов по угловой скорости; результирующий сигнал через второй цифроаналоговый преобразователь 27 поступает на второй блок умножения 7 в виде сигнала K2.
Шестой масштабный усилитель 29 и блок 30 формируют постоянную времени Тф фильтра 31 по (56) с учетом (6) блока 9.
Устройство несложно реализуется на элементах автоматики и вычислительной техники, например по [3, 4] и алгоритмически.
Предложенное многорежимное цифроаналоговое адаптивное устройство управления угловым движением по тангажу беспилотного летательного аппарата позволяет повысить точность управления в условиях широкого диапазона условий полета БЛА.
Источники информации
1. Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов. / Под ред. Г.С. Бюшгенса. М.: Наука. Физматлит, 1998, с.443.
2. Патент РФ №2338236, 10.11.2008 г., кл. G05D 1/08.
3. В.Б. Смолов. Функциональные преобразователи информации. Л.: Энергоиздат, Ленинградское отделение, 1981, с.22, 41.
4. А.У. Ялышев, О.И. Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. М.: Машиностроение, 1981, с.107, 126.
Многорежимное цифроаналоговое устройство управления угловым движением по тангажу беспилотного летательного аппарата, содержащее последовательно соединенные задатчик угла, первый блок сравнения, первый блок умножения и первый сумматор, датчик угла, выход которого соединен со вторым входом первого блока сравнения, последовательно соединенные датчик угловой скорости и второй блок умножения, выход которого соединен со вторым входом первого сумматора, последовательно соединенные датчик скоростного напора и блок деления и первый задатчик опорного сигнала, выход которого соединен со вторым входом блока деления, отличающееся тем, что оно содержит последовательно соединенные второй задатчик опорного сигнала, второй блок сравнения, второй вход которого соединен с выходом датчика скоростного напора, управляемый переключатель, второй вход которого соединен с выходом блока деления, первый масштабный усилитель, второй сумматор и первый цифроаналоговый преобразователь, выход которого соединен со вторым входом первого блока умножения, второй масштабный усилитель, вход которого соединен со вторым выходом управляемого переключателя, а выход - со вторым входом второго сумматора, последовательно соединенные третий задатчик опорного сигнала, третий блок сравнения, второй вход которого соединен с выходом датчика скоростного напора, логический элемент «И», управляемый ключ, второй вход которого соединен с выходом блока деления, и третий масштабный усилитель, выход которого соединен с третьим входом второго сумматора, последовательно соединенные дифференцирующее звено, вход которого соединен с выходом датчика скоростного напора, и блок выделения сигнала отрицательной полярности, выход которого соединен со вторым входом логического элемента «И», последовательно соединенные четвертый масштабный усилитель, вход которого соединен с первым выходом управляемого переключателя, третий сумматор и второй цифроаналоговый преобразователь, выход которого соединен со вторым входом второго блока умножения, пятый масштабный усилитель, вход которого соединен со вторым выходом управляемого переключателя, а выход - со вторым входом третьего сумматора, и последовательно соединенные шестой масштабный усилитель, вход которого соединен с выходом блока деления, третий цифроаналоговый преобразователь, противоизгибный фильтр, второй вход которого соединен с выходом первого сумматора, и ограничитель сигнала, выход которого является выходом устройства.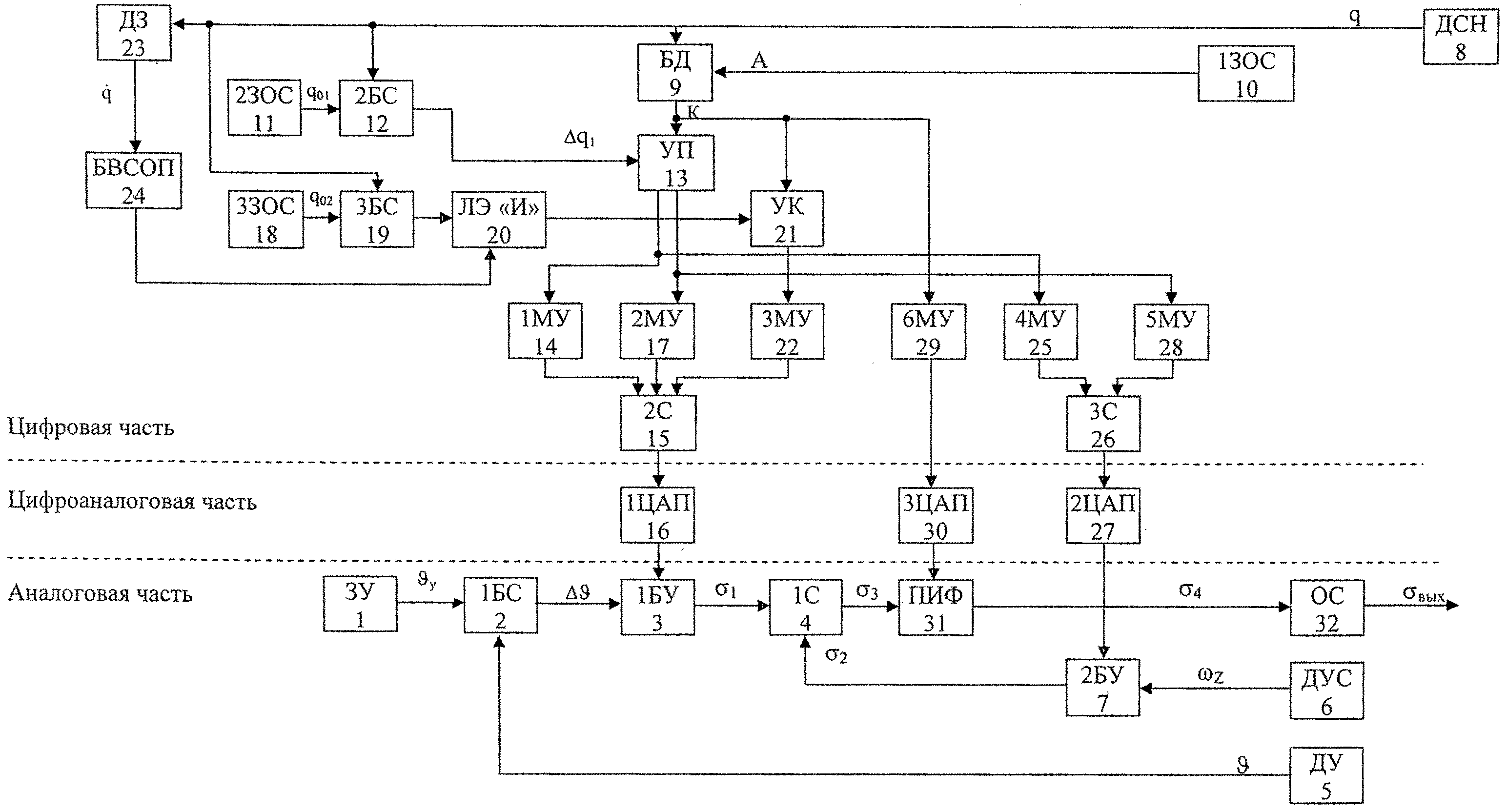
Способ формирования цифроаналогового сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов и устройство для его осуществления
Система стабилизации углового движения космического аппарата
Способ повышения теплоотдачи и радиационной защиты электронных блоков
Способ формирования сигнала управления угловым движением нестационарного летательного аппарата и устройство для его осуществления
Способ функционального контроля и резервирования плат измерительного канала угловой скорости космического аппарата и устройство для его реализации
Способ формирования цифроаналогового адаптивного сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ формирования цифроаналогового адаптивного сигнала управления летательным аппаратом с переменной структурой и устройство для его осуществления
Способ формирования цифроаналогового сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата и устройство для его реализации
Способ ориентации космического аппарата и устройство для его реализации
Способ формирования цифроаналогового сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов и устройство для его осуществления
Система стабилизации углового движения космического аппарата
Способ повышения теплоотдачи и радиационной защиты электронных блоков
Способ формирования сигнала управления угловым движением нестационарного летательного аппарата и устройство для его осуществления
Способ функционального контроля и резервирования плат измерительного канала угловой скорости космического аппарата и устройство для его реализации
Способ формирования цифроаналогового адаптивного сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ формирования цифроаналогового адаптивного сигнала управления летательным аппаратом с переменной структурой и устройство для его осуществления
Способ формирования цифроаналогового сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата и устройство для его реализации
Способ ориентации космического аппарата и устройство для его реализации

