Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ
Вид РИД
Изобретение
Изобретение относится к управлению движением судна при следовании по заданной траектории и касается автоматического управления рулем или другим рулевым средством управления, которым оборудовано судно.
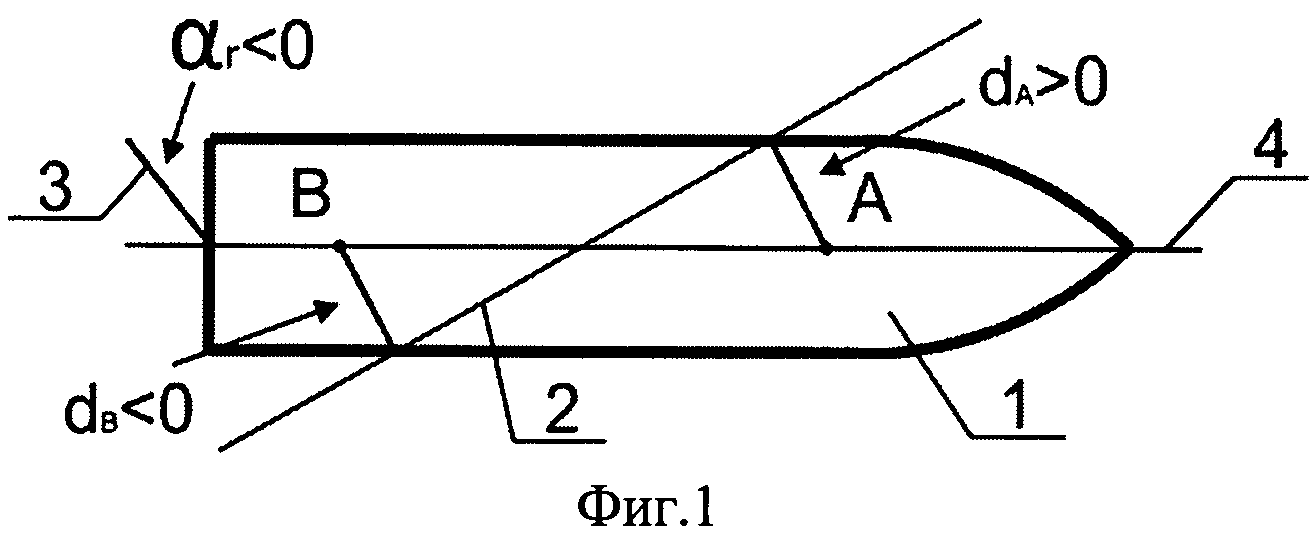
Известен способ управления движущимся объектом, например судном (Пат. РФ №22663606, опубл. 10.11.2005), по величине поперечных смещений двух точек, разнесенных по длине судна в его диаметральной плоскости (ДП) и называемых условно носовой (точка А на фиг.1-4) и кормовой (точка В на фиг.1-4).
Расстояние между точками А и В выбирают в зависимости от технической возможности размещения в этих точках приемных антенн спутниковой навигационной системы (СНС). Чем больше это расстояние, тем качественнее работа системы управления движением судна по заданной траектории.
Координаты этих точек определяют непрерывно с высокой точностью (±1,0 м), в связи с введением в СНС береговых станций, вычисляющих и передающих на судно дифференциальные поправки.
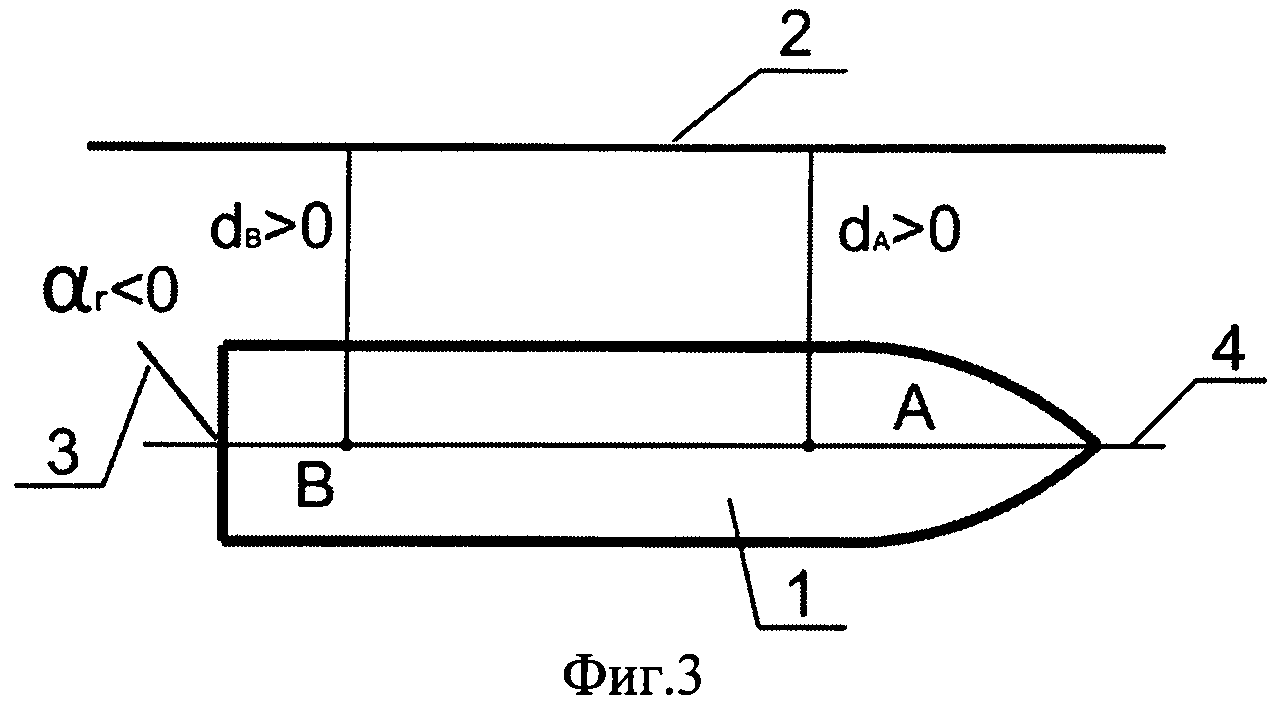
Значения координат позволяют непрерывно вычислять поперечные смещения точки А (dA) и точки В (dB) от заданной траектории. Причем поперечное смещение каждой точки от заданной траектории считается положительным, если она смещается вправо, и отрицательным, если она смещается влево (фиг.1-4).
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например руля судна, по закону:


где kA, kB - коэффициенты усиления по поперечным смещениям носовой и кормовой точек судна от заданной траектории. Это положительные величины, причем dA больше kB. Угол α перекладки руля считается положительным при его перемещении в сторону правого борта.
На фиг.1-4 изображены основные варианты возможных отклонений судна 1 от заданной траектории 2 и управление в каждом из них (угол α перекладки руля 3). Например, на фиг.1, 2 ДП 4 судна 1 пересекает заданную траекторию 2 под некоторым углом, величина которого характеризуется значениями поперечных смещений точки А (dA) и точки В (dB), причем dA больше 0, dB меньше 0 (фиг.1) и dA меньше 0, dB больше 0 (фиг.2). В первом случае (фиг.1.) согласно закону (1) угол α отклонения руля будет иметь отрицательное значение, т.е. руль будет переложен на левый борт и судно начнет поворот влево, что приведет к уменьшению dA и dB и в конечном итоге к выходу судна на заданную траекторию; во втором случае (фиг.2) согласно закону (1) угол α отклонения руля будет иметь положительное значение, т.е. руль будет переложен на правый борт и судно начнет поворот вправо, что приведет к уменьшению dA, dB и к выходу судна на заданную траекторию.
На фиг.3, 4 ДП 4 судна 1 не пересекает заданную траекторию 2, а поперечные смещения точек А, В имеют одинаковые знаки, положительные (фиг.3) и отрицательные (фиг.4). Знак и соответствующее направление угла α перекладки руля зависят от соотношения значений коэффициентов kA и kB (kA больше kB, если знаки поперечных смещений точек А и В одинаковы, фиг.3, 4; kA и kB будут равны по величине, если знаки поперечных смещений точек А и В противоположны, фиг.1, 2). Соотношение значений коэффициентов kA, kB может выбираться из различных соображений. Например, если считать, что отклонение направления движения судна от заданного будет находиться в пределах ±90°, то указанное соотношение определяется выражением:

где l - расстояние между точками А и В.
Однако предложенный закон управления рулевым устройством (1) не учитывает инерционных особенностей как рулевого устройства, так и самого объекта управления судна. Поэтому его применение не позволит качественно управлять судном, а в ряде случаев может привести к потере его управляемости из-за неконтролируемого изменения отклонений точек А и В от заданной траектории.
Цель изобретения - повышение точности удержания судна на заданной траектории и улучшение качества управления, в частности, исключение вероятности потери управляемости.
Для достижения поставленной цели предлагается способ, основанный на законе управления, который определяет скорость  перекладки руля
перекладки руля

где где kA, kB - коэффициенты усиления по поперечным смещениям носовой и кормовой точек судна от заданной траектории, kα -коэффициент усиления.
При этом действует ограничение на величину угла αr перекладки руля, который не должен превосходить максимального значения, характерного для конкретного рулевого устройства рассматриваемого судна, т.е. αr<αrmax.
Предлагаемый способ управления состоит в выработке управляющего сигнала sign, величина которого определяет скорость перекладки руля (или любого другого рулевого органа), то есть

Зависимость скорости
перекладки руля от величины управляющего сигнала выражается графически (фиг.5).
Этот закон управления достаточно универсален и содержит зону нечувствительности (sign<sign), зону насыщения (sign>sign2) и переходную между ними зону (sign1<sign<sign2) линейного изменения скорости
перекладки руля. Закон предполагает асимметричное отображение для отрицательных значений сигнала (sign<0). В этих зонах скорость
перекладки руля меняется следующим образом (для sign>0):

Как видно из выражения (4), инерция самого судна учитывается явным образом добавлением в закон управления члена, который зависит от текущего положения αr пера руля.





Способ управления движущимся судном
Способ управления движением буксирной системы
Способ управления движущимся судном
Способ определения демпфирующих составляющих нормальной гидродинамической силы и момента
Способ управления судном при выполнении им швартовной операции к борту судна-партнера, лежащего в дрейфе
Способ управления движущимся судном
Способ управления судном при выполнении им швартовной операции к борту судна партнера, стоящего на якоре
Способ определения поперечной гидродинамической силы, образующейся на корпусе судна при выполнении сложного маневрирования
Технологическая жидкость для перфорации и глушения нефтяных скважин
Паштет из сайки с тыквой
Способ дистанционного измерения температуры среды

