Результат интеллектуальной деятельности: Способ определения основного сопротивления движению как повозки самоходного подвижного состава - способ равновесных скоростей (варианты)
Вид РИД
Изобретение
Изобретение относится к области испытания различных конструкций или устройств, а именно к испытанию самоходного подвижного состава с целью определения его характеристик.
В настоящее время известно два способа определения основного сопротивления движению подвижного состава: динамометрический способ и способ вкатывания - скатывания (Труды Всесоюзного научно-исследовательского института железнодорожного транспорта. Выпуск 311. П.Н. Астахов Сопротивление движению железнодорожного транспорта. М. Транспорт. 1966 г. стр. 32, 40-70; В.Е. Розенфельд, И.П. Исаев, Н.Н. Сидоров Электрическая тяга, М. Трансжелдориздат, 1962 г. стр. 340-341).
По динамометрическому способу на прямом участке пути с нулевым уклоном измеряют сопротивление движению группы вагонов с помощью динамометра динамометрического вагона, находящегося между локомотивом и группой вагонов. Измеряемая динамометром сила тяги будет соответствовать силе сопротивления движению состава.
По данному способу чаще всего определяют основное сопротивление движению вагонов, причем для повышения точности берут состав из нескольких вагонов одной серии. У самоходного подвижного состава (локомотив, автомотриса, тяговый модуль, специальный подвижной состав, дизельпоезд, электропоезд) различают основное сопротивление движению на холостом ходу и как повозки. Основное сопротивление движению на холостом ходу самоходного подвижного состава имеет место на выбеге. Основное сопротивление самоходного подвижного состава как повозки соответствует режиму тяги и представляет собой основное сопротивление при разъединенном силовом приводе, соединяющем движущие колеса с двигателем.
Основное сопротивление движению как повозки самоходного подвижного состава определяется в случае установки его на специальные технологические тележки без тяговых электродвигателей. В случае нахождения самоходного подвижного состава на штатных тележках определяется сопротивление движению на холостом ходу.
Недостатками динамометрического способа определения основного сопротивления движения как повозки самоходного подвижного состава являются:
- необходимость наличия специальных технологических тележек;
- необходимость локомотива для транспортировки единицы самоходного подвижного состава;
- невысокая точность определения сопротивления движению при измерении одной единицы подвижного состава, какой чаще всего является самоходный подвижной состав, т.к. небольшие текущие отклонения в продольном профиле от нулевого значения оказывают существенное влияние на получаемый результат.
При измерении сопротивления движению методом вкатывания - скатывания испытуемый самоходный подвижной состав сначала скатывают по заранее пронивелированному участку с подъемом достаточной протяженности и постоянной крутизны. Опыты повторяются несколько раз, сообщая испытываемой единице самоходного подвижного состава различные начальные скорости, чтобы охватить весь скоростной диапазон. Затем проводят вкатывания единицы испытываемого самоходного подвижного состава на этом же участке также с различными начальными скоростями. При этом из-за встречающихся местных отклонений в величине уклона необходимо, чтобы единица самоходного подвижного состава имела на одном и том же месте участка одно и то же значение скорости как при вкатывании, так и при скатывании.
Для обеспечения режима вкатывания используют для разгона единицы самоходного подвижного состава один вспомогательный локомотив, а при размещении единицы самоходного подвижного состава на технологических тележках - два вспомогательных локомотива. Толкание испытываемого самоходного подвижного состава вспомогательными локомотивами осуществляется до момента его вхождения на испытательный участок во избежание влияния толкающего локомотива на результат испытаний.
Методика определения основного сопротивления движения по данному способу основана на известных физических законах.
Считая сопротивление движению при вкатывании и скатывании с одной и той же скоростью равными друг другу, уравнение движения в удельных величинах представляется для скатывания объекта в виде

и для вкатывания в виде

где i - величина уклона, где проводят измерения в тысячных долях и представляет собой умноженное на 1000 значение тангенса угла наклона профиля;
ω'o - основное удельное сопротивление движению как повозки, зависящее от скорости движения;
(1+γ) - коэффициент инерции вращающихся масс;
 - изменение скорости движения при скатывании и вкатывании.
- изменение скорости движения при скатывании и вкатывании.
В уравнениях (1) и (2) величины (1+γ) и  определены для состояния объекта как повозки, т.е. при разъединенных зубчатых передачах осевых редукторов.
определены для состояния объекта как повозки, т.е. при разъединенных зубчатых передачах осевых редукторов.
Путем сложения обеих уравнений получают:

откуда коэффициент инерции вращающихся масс

Величина удельного основного сопротивления движению определяется по формулам (1) или (2), при подстановке в них значения (1+γ).
Так для режима скатывания находится

Сила основного сопротивления движению как повозки W'o единицы самоходного подвижного состава определяется по формуле

где Р - вес испытываемого самоходного подвижного состава;
ω'o - основное удельное сопротивление движению как повозки самоходного подвижного состава.
Недостатками данного способа при определении основного сопротивления движению как повозки являются:
- необходимость наличия специальных технологических тележек;
- необходимость наличия двух локомотивов, обеспечивающих вкатывание и скатывание объекта;
- необходимость наличия железнодорожного участка для проведения измерений с подъемом достаточной протяженности и постоянной крутизны.
Техническим результатом изобретения является создание способа непосредственного определения основного сопротивления движению как повозки самоходного подвижного состава без необходимости изготовления технологических тележек с отсоединенными от колесных пар тяговых электродвигателей или гидропередачи, без наличия специального участка с подъемом достаточной протяженности и постоянной крутизны и вспомогательных локомотивов, что повысит точность определения сопротивления движению поездов, улучшит качество составления режимных карт и программ ведения поездов автомашинистом и, в конечном счете удешевит перевозочный процесс.
Технический результат достигается тем, что в способе определения основного сопротивления движению как повозки железнодорожного самоходного подвижного состава, заключающемся в измерении на прямом участке железнодорожного пути динамометрической силы тяги, скорости движения и вычислении касательной силы тяги, при этом зависимость основного сопротивления движению от скорости движения принимают предварительно для близкого вида самоходного подвижного состава, выполняют разгоны единицы самоходного подвижного состава последовательно на ряде позиций контроллера машиниста при отключенном управлении автоматического перехода с одной позиции контроллера машиниста на другую на участках железнодорожного пути с нулевым уклоном до достижения единицей самоходного подвижного состава равновесной скорости движения, определяемой по отсутствию ускорения, фиксируют значения касательной силы тяги FКi, равные силе основного сопротивления движению как повозки W'oi, по полученным значениям основного сопротивления движения как повозки строят зависимость основного сопротивления движению как повозки W'o1 от скорости, пересчитывают касательную силу тяги путем замены предварительно принятых значений основного сопротивления движению на значения, вычисленные по экспериментально полученной зависимости, по вновь полученным значениям касательной силы тяги строят новую зависимость основного сопротивления движению как повозки W'o2 от скорости самоходного подвижного состава, повторяют итерационный процесс до получения необходимой точности зависимости основного сопротивления движению как повозки.
Также технический результат достигается тем, что в способе определения основного сопротивления движению железнодорожного самоходного подвижного состава как повозки, заключающемся в измерении на прямом участке железнодорожного пути динамометрической силы тяги и скорости движения, вычислении касательной силы тяги, при этом зависимость основного сопротивления движению от скорости движения принимают предварительно для близкого вида самоходного подвижного состава, выполняют разгоны единицы самоходного подвижного состава на одной из позиций контроллера машиниста при отключенном управлении автоматического перехода с одной позиции контроллера машиниста на другую на ряде участков железнодорожного пути с различными значениями крутизны подъемов до достижения единицей самоходного подвижного состава равновесной скорости движения, определяемой по отсутствию ускорения, фиксируют при равновесной скорости на каждом подъеме значения касательной силы тяги, равные общему сопротивлению движения

где
FК - касательная сила тяги;
WΣ - общее сопротивление движению;
W'o - основное сопротивление движению как повозки;
Р - вес единицы самоходного подвижного состава;
i - значение подъема участков железнодорожного пути в 
вычисляют основное сопротивление движению как повозки W'o, по полученным на разных подъемах значениям основного сопротивления движению строят новую зависимость основного сопротивления движению как повозки W'o1 от скорости, пересчитывают касательную силу тяги FК путем замены предварительно принятых значений основного удельного сопротивления движению как повозки ω'o на значения, вычисленные по экспериментально полученной зависимости W'o1, по вновь полученным значениям касательной силы тяги FК1 для каждого подъема определяют новые значения общего сопротивления движению WΣ2, вычисляют новое значение основного сопротивления движению как повозки W'o2, по полученным на разных подъемах значениям основного сопротивления движению рассчитывают зависимость основного сопротивления движению как повозки, повторяют итерационный процесс до получения необходимой точности зависимости основного сопротивления движению как повозки.
Изобретение поясняется графиками на фиг. 1 и фиг. 2.
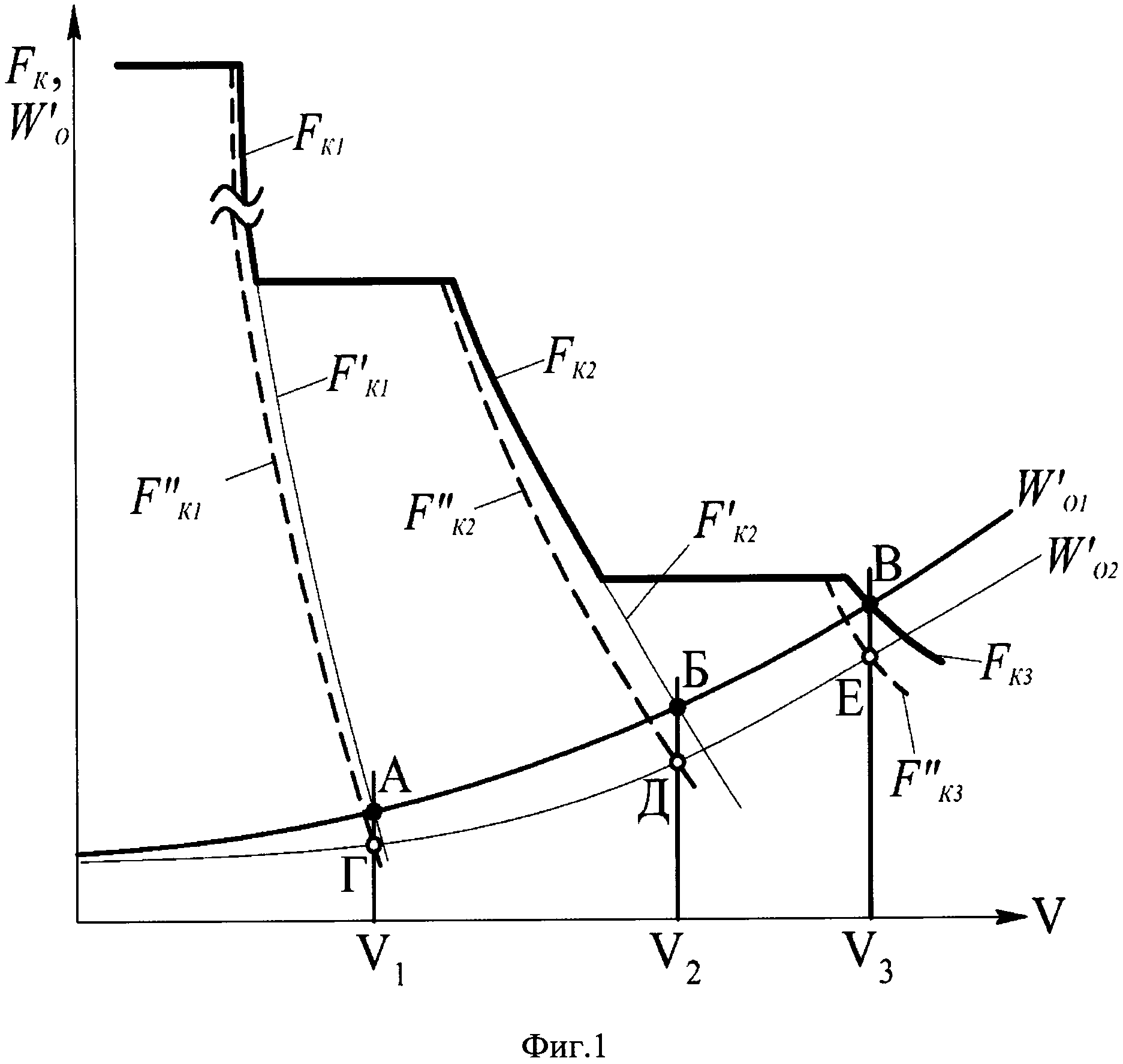
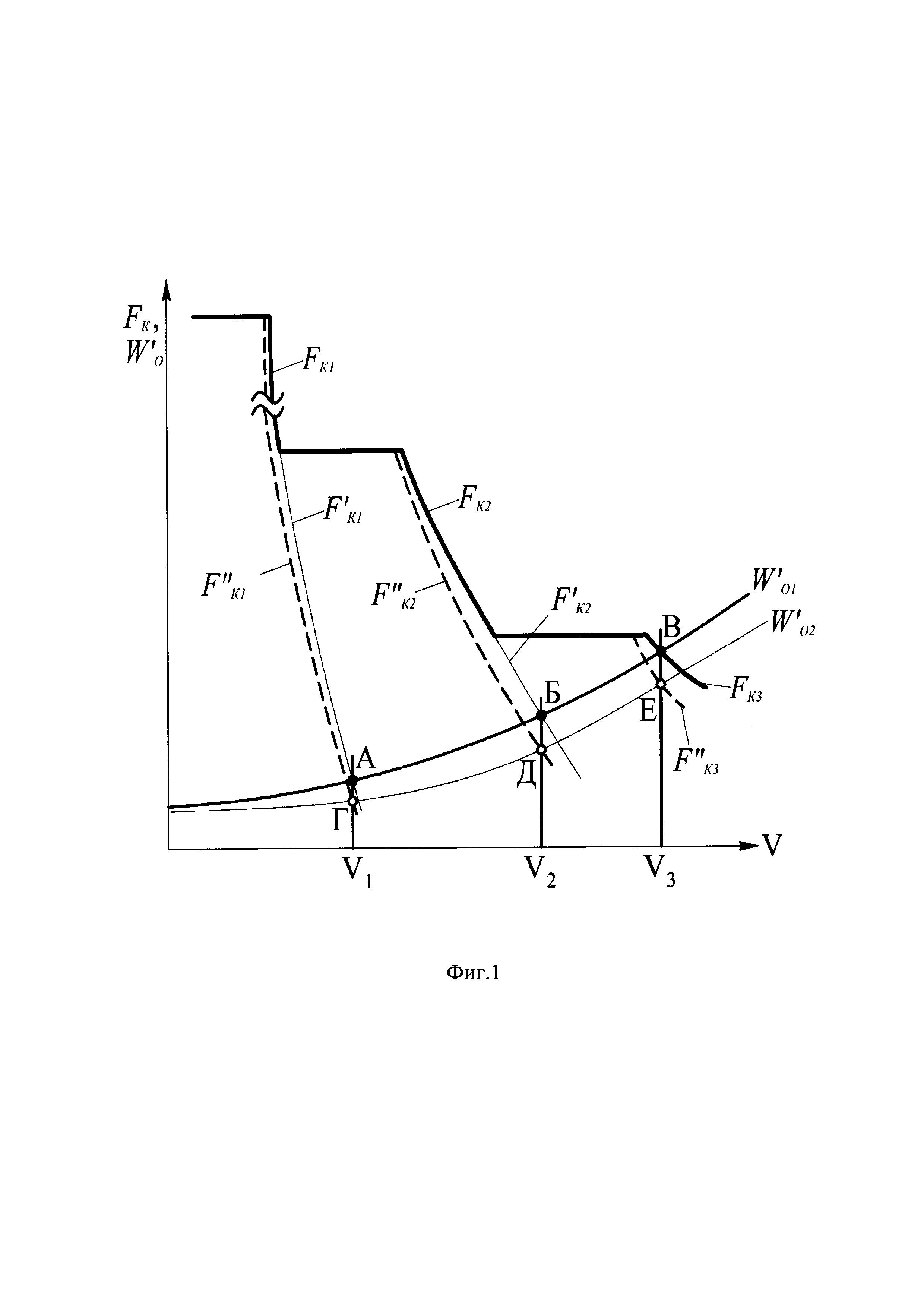
На фиг. 1 изображена зависимость основного сопротивления движению как повозки от скорости движения самоходного подвижного состава, полученная при движении на площадке на ряде позиций контроллера машиниста - по первому варианту.
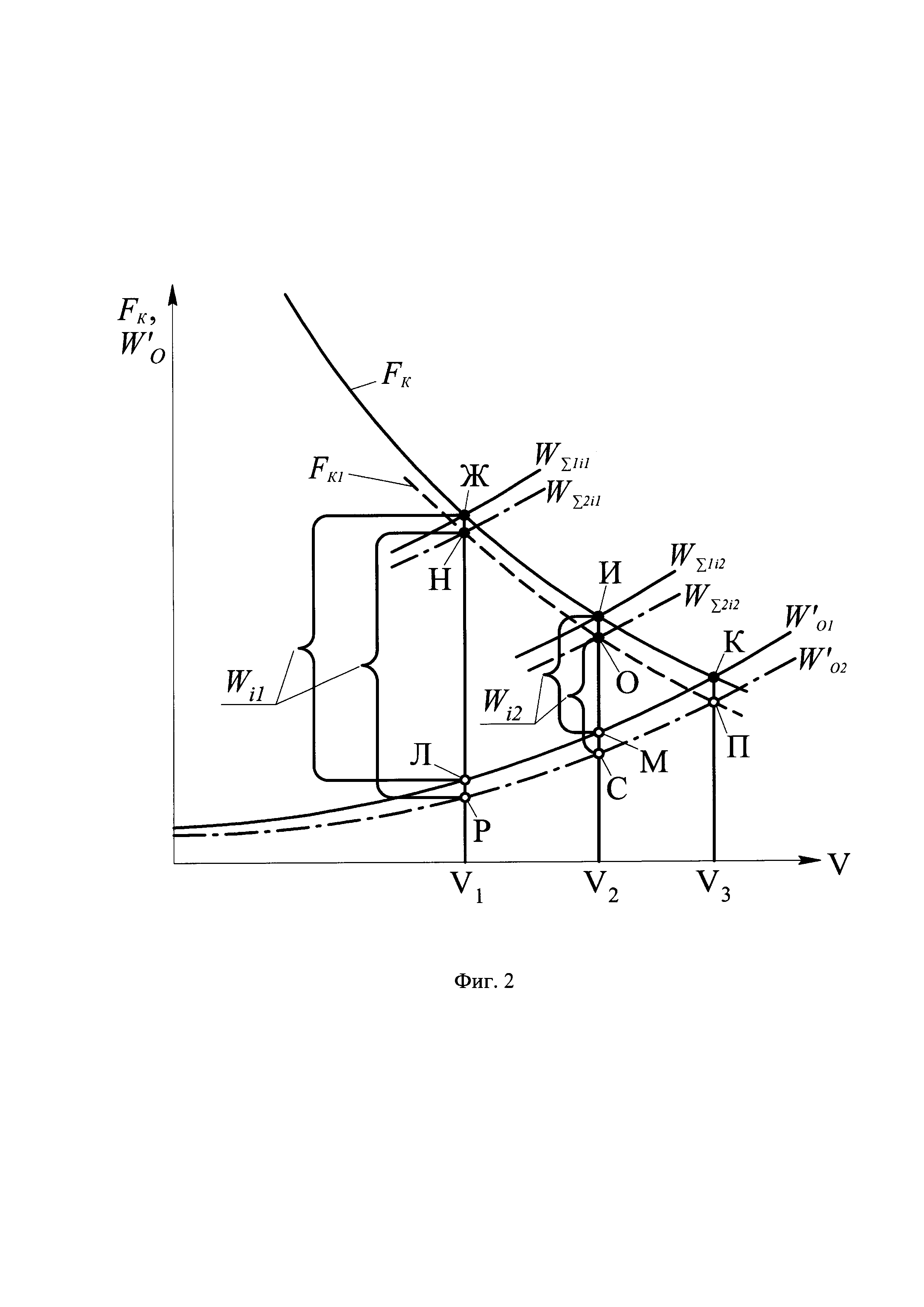
На фиг. 2 изображена зависимость основного сопротивления движению как повозки от скорости движения самоходного подвижного состава, полученная при движении на уклонах разной крутизны при работе на одной из имеющихся позиций контроллера машиниста - по второму варианту.
На фиг. 1 толстой сплошной линией выделена зависимость силы тяги FК от скорости самоходного подвижного состава, в которой основное удельное сопротивление движению как повозки ω'o принято для близкого вида подвижного состава. На графике изображена зависимость силы тяги от скорости условно выполненная на 3-х позициях контроллера машиниста FК1, FК2, FК3.
Горизонтальные участки зависимости силы тяги от скорости являются участками автоматического перехода с одной позиции на другую. При отключенном управлении автоматического перехода с одной позиции на другую зависимости силы тяги от скорости на каждой позиции будут иметь продолжения, показанные на графике (фиг. 1) тонкими сплошными линиями и обозначенные F'К1, F'К2. Вертикальными линиями обозначены равновесные скорости V1, V2 и V3 т.е. скорости при которых сила тяги равна силе сопротивления движению и, следовательно, отсутствует ускорение или замедление движения единицы самоходного подвижного состава. Через точки А, Б, В на пересечении зависимостей силы тяги от скорости F'К1, F'К2 и F'К3 на ряде позиций контроллера машиниста с линиями равновесных скоростей V1, V2 и V3 проведена кривая W'o1, представляющая собой зависимость основного сопротивления как повозки от скорости движения самоходного подвижного состава в первом приближении, которая принята при уточнении зависимостей силы тяги на ряде позиций.
Через точки Г, Д и Е на пересечении зависимостей силы тяги от скорости F''К1, F''К2, F''К3 на ряде уточненных позиций контроллера машиниста, показанных на графике пунктирными линиями, с линиями равновесных скоростей V1, V2 и V3 проведена кривая W'o2, показанная на графике тонкой линией, представляющая собой уточненную зависимость основного сопротивления движению испытываемого самоходного подвижного состава как повозки.
На фиг. 2 показана зависимость силы тяги FК от скорости только на одной позиции контроллера машиниста. Вертикальными линиями обозначены равновесные скорости V1, V2 и V3 при движении на подъемах с крутизной i1, i2, а также на площадке при i3=0. Точки Ж, И, К пересечения зависимости силы тяги FК от скорости с линиями равновесных скоростей V1, V2 и V3 соответствуют значениям общего сопротивления движению единицы самоходного подвижного состава, состоящему из основного сопротивления движению как повозки и дополнительного сопротивления движению от подъема WΣ1i1, WΣ1i2 - подъемов со значениями i1, i2.
Точки Л, М, К соответствуют значениям основного сопротивления движению как повозки W'o1 при движении на площадке при скоростях V1, V2 и V3. Значения основного сопротивления движению как повозки W'o1 получены вычитанием из значений общего сопротивления движению WΣ значений дополнительного сопротивления движению Wi=Pi, показанных на рисунке фигурными скобками. Сплошная линия, проведенная через точки Л, М, К соответствует зависимости основного сопротивления движению как повозки W'o1 от скорости в первом приближении.
Уточненная по зависимости основного сопротивления движению как повозки W'o1 от скорости зависимость силы тяги FК1 от скорости, показана на графике пунктирной линией. Точки Н, О и П на пересечениях линий равновесных скоростей V1, V2 и V3 при движении на уклонах разной крутизны, а также на площадке с уточненной тяговой характеристикой FК1 соответствуют уточненным значениям общего сопротивления движению WΣ2 при движении на уклонах i1, i2 и на площадке при i3=0. Точки Р, С полученные в результате вычитании из уточненных значений общего сопротивления движению самоходного подвижного состава на подъемах WΣ2i1, WΣ2i2 дополнительного сопротивления движению Wi1, Wi2, от подъемов i1 и i2 соответствуют уточненным значениям основного сопротивления движению как повозки.
Через точки Р, С и точку П, соответствующую значению основного сопротивления движения как повозки при движении на площадке при работе по уточненной зависимости силы тяги от скорости FК1 проведена кривая, показанная на графике штрих-пунктирной линией, являющиеся уточненной зависимостью основного сопротивления движению как повозки W'o2 от скорости испытываемого самоходного подвижного состава.
Реализация способа заключается в проведении экспериментальных замеров и последующих расчетов.
Предварительно определяют зависимость касательной силы тяги единицы самоходного подвижного состава в прямом участке пути опытным путем. Для этого делают заезды по прямому участку со сплоткой, состоящей из испытываемой единицы самоходного подвижного состава, динамометрического вагона и тормозного модуля и/или состава. При этом измеряют динамометрическую силу тяги Fд и вычисляют касательную силу тяги по формуле

где:
Fд - сила тяги, измеренная динамометром динамометрического вагона,
Р - вес испытываемого самоходного подвижного состава;
ω'o - основное удельное сопротивление движению как повозки самоходного подвижного состава, которое принимается предварительно для близкого вида самоходного подвижного состава из справочной литературы;
i - дополнительное удельное сопротивление от уклона;
ωr - дополнительное удельное сопротивление от кривизны пути (на прямом участке пути равно нулю);
 - составляющая, учитывающая влияние вращающихся масс в экипаже при изменении скорости движения.
- составляющая, учитывающая влияние вращающихся масс в экипаже при изменении скорости движения.
После построения зависимости касательной силы тяги от скорости единицы самоходного подвижного состава для измерения основного сопротивления движению по первому варианту проводят разгоны единицы самоходного подвижного состава на прямом участке пути с нулевым уклоном до достижения равновесной скорости. Разгоны проводят поочередно на ряде позиций контроллера машиниста. Разгоны выполняют только на тех позициях, где равновесная скорость будет меньше конструкционной скорости самоходного подвижного состава.
При достижении равновесной скорости фиксируют соответствующее ей значение касательной силы тяги FКi, которое равно в этот момент основному сопротивлению движения как повозки W'oi.
По нескольким значениям основного сопротивления движению соответствующим точкам А, Б, В, полученным в результате разгонов на ряде позиций контроллера машиниста, проводят кривую основного сопротивления движения как повозки W'o1. Затем вычисляют зависимость основного удельного сопротивления движению от скорости движению исходя из формулы (6). Эту зависимость вносят в формулу вычисления касательной силы тяги (8) и строят новые тяговые характеристики F''К1, F''К2, F''К3. На пересечении кривых вновь полученных зависимостей касательной силы тяги от скорости с линиями равновесных скоростей V1, V2 и V3 находят новые значения основного сопротивления движению как повозки самоходного подвижного состава, через которые строят уточненную зависимость основного сопротивления движения как повозки W'o2 от скорости испытываемой единицы самоходного подвижного состава. Повторяют итерационный процесс до достижения необходимой точности зависимости основного сопротивления движению как повозки от скорости.
Для измерения основного сопротивления движению по второму варианту выполняют разгоны единицы самоходного подвижного состава на одной из позиций контроллера машиниста при отключенном управлении автоматического перехода с одной позиции контроллера машиниста на другую на ряде участков железнодорожного пути с различными значениями крутизны подъемов до достижения единицей самоходного подвижного состава равновесной скорости движения, фиксируют на каждом подъеме значения равновесной скорости V1, V2 и V3 и соответствующее ее значение силы тяги, которое равно в этот момент общему сопротивлению движению WΣ, состоящему из основного сопротивления движению как повозки W'o и сопротивления движению от подъема Wi. Вычитая из общего сопротивления движению сопротивление движению от подъема Wi=Pi, получаем значения для каждой равновесной скорости основного сопротивления движению как повозки. Через полученные точки Л, М и точку К, соответствующую значению основному сопротивлению движению как повозки исследуемой единицы самоходного подвижного состав на площадке проводят кривую, представляющую зависимость основного сопротивления движению как повозки от скорости W'o1. Затем по формуле (6) вычисляют зависимость основного удельного сопротивления движению от скорости движения. Эту зависимость вносят в формулу вычисления касательной силы тяги FК (8) и строят уточненную зависимость силы тяги от скорости. На пересечении кривой вновь полученной зависимости касательной силы тяги от скорости с линиями равновесных скоростей V1, V2 и V3 находят новые значения общего сопротивления движению самоходного подвижного состава WΣ. Вычитая из общего сопротивления движению сопротивление движению от подъема Wi=Pi, получают значения для каждой равновесной скорости основного сопротивления движению как повозки W'o. Строят кривую, представляющую уточненную зависимость основного сопротивления движению как повозки от скорости W'o2 испытываемой единицы самоходного подвижного состава. Итерационный процесс вычисления продолжают до получения результата необходимой точности.
В условиях проведения измерений на реальном железнодорожном участке оба варианта определения основного сопротивления движению могут быть совмещены.
Предложенный способ позволит определять основное сопротивление движению самоходного подвижного состава как повозки без предъявления повышенных требований к участку, где проводятся испытания, без переподкатки самоходного подвижного состава на технологические тележки и без наличия вспомогательных локомотивов. Определение основного сопротивления движению самоходного подвижного состава как повозки выполняется одновременно с определением его тяговых характеристик и поэтому не увеличивает продолжительность испытаний.
Способ является единственно возможным для определения основного сопротивления движению как повозки высокоскоростных поездов.
Тяговый электропривод постоянного тока
Способ автоматического автономного подогрева системы охлаждения дизеля тепловоза
Рельсосмазыватель ручной
Устройство для плазменно-электролитического оксидирования металлов и сплавов
Маневровый тепловоз и способ его эксплуатации без машиниста
Устройство для микродугового оксидирования металлов и сплавов
Устройство для крепления контейнера к раме платформы
Тормозная система железнодорожного подвижного состава
Способ регулирования скорости движения тепловоза в режиме электрического торможения
Способ регулирования электрической передачи тепловоза
Тяговый привод локомотива с зубчатым ремнем
Устройство измерения расхода топлива двигателя внутреннего сгорания
Запорный клапан для установки датчиков
Рычажно-пружинное устройство (варианты) и способ закрепления железнодорожного подвижного состава

