Результат интеллектуальной деятельности: Способ определения параметров маневрирования источника зондирующих сигналов
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано для построения систем обнаружения гидролокационных сигналов в современных гидроакустических комплексах.
Зондирующие сигналы (ЗС), излучаемые гидролокаторами, размещенными на различных носителях, в том числе и подвижных, могут быть обнаружены на больших дистанциях с использованием известных систем обнаружения гидролокационных сигналов [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. «Корабельная гидроакустическая техника». СПб. Наука. - 2004. стр. 89-92]. При обнаружении этих сигналов возникает задача измерения их параметров, а также задача определения параметров маневрирования источника ЗС.
Известен метод обнаружения местоположения источника зондирующих сигналов, изложенный в работе [Простаков А.Л. «Гидроакустические средства флота» // М: Воениздат. - 1974. с. 90]. В работе рассматривается задача определения места случайной цели, излучающей импульсные сигналы, при использовании нескольких приемных постов. Измеряются разности времени прихода звука к каждому приемнику, которые в свою очередь соответствуют разности расстояний от источника звука до соответствующих приемников. Как известно, геометрическим местом точек, разность расстояний которых до приемников постоянна, является гипербола. Определив точку пересечения рассчитанных гипербол, можно найти место источника звука и соответственно дистанцию до него.
За это время положение движущегося гидролокатора может существенно измениться, что приведет к ошибке определения скорости перемещения источника ЗС и дистанции до него. Дистанция распространения зондирующего сигнала существенно превышает дистанцию обнаружения отраженного сигнала, именно поэтому имеет смысл определять параметры маневрирования источника ЗС.
Известен способ измерения курсового угла движения источника зондирующих сигналов [Воробьев А.В., Никулин М.Н., Тимошенков В.Г. Патент РФ №2515419 от 10.05.2014. Способ измерения изменения курсового угла движения источника зондирующих сигналов. МПК G01S 3/80] содержащий последовательный прием ЗС, в котором производят спектральный анализ первого, второго и n-ого сигналов, определяют порог обнаружения, измеряют амплитуду спектральных отсчетов превысивших порог, определяют и запоминают амплитуды спектральных отсчетов, имеющих максимальную амплитуду, а изменение курсового угла движения источника определяют через соотношения разности измеренных последовательных частот.
Недостатком этого способа является то, что он использует обработку длительных зондирующих сигналов, что имеет ограниченное место в практике работы гидролокационных акустических средств. В большинстве случаев используются гидролокаторы, которые излучают ЗС короткой длительности, у которых спектр широкий, что не позволит выделить спектральные отсчеты для измерения их разности.
Известен способ измерения изменения курсового угла движения источника зондирующих сигналов [Тимошенков В.Г. Патент РФ №2545068 от 27.03.2015. Способ измерения изменения курсового угла движения источника зондирующих сигналов. МПК G01S 3/80] в котором последовательно принимают ЗС перемещающегося источника, определяют момент времени прихода первого принятого ЗС, последовательно измеряют моменты времени ti приема еще n зондирующих сигналов, где n не менее 3-х, определяют временной интервал Tk между моментами прихода каждых двух следующих друг за другом зондирующих сигналов Tk=ti+1-ti, определяют разность измеренных временных интервалов ΔTm=Tk+1-Tk, где m номер измерения разности последовательных временных интервалов, a Tk+1=ti+2-ti+1, определяют знак изменения разности временных интервалов (ΔTm+1-ΔTm), если знак изменения разности отрицательный, то считают, что источник сигналов приближается, запоминают первую разность временных интервалов, определяют косинус изменения курсового угла Qm движения источника ЗС, как отношение каждой последующей разности к каждой предыдущей разности временных интервалов cos Qm=ΔTm+1/ΔTm, определяют величину изменения курсового угла движения источника ЗС, как величину обратную косинусу измеренного отношения, если измеренная величина разности интервалов положительная, то источник ЗС удаляется и косинус изменения курсового угла Qm движения источника вычисляется как отношение каждой предыдущей разности к каждой последующей разности cos Qm=ΔTm/ΔTm+1.
Недостатком рассматриваемого способа является то, что он дает представление о том, приближается или удаляется источник зондирующих сигналов и направление на него в данный текущий момент, но не определяет характер движения источника.
Задача изобретения заключается в выявлении маневрирования источника зондирующих сигналов.
Технический результат заключается в определении параметров маневрирования источника зондирующих сигналов.
Технический результат достигается тем, что в способ, содержащий последовательный прием зондирующих сигналов перемещающегося источника перемещающимся приемником ЗС, последовательное измерение моментов времени ti приема n зондирующих сигналов, где n не менее 3-х, определение временных интервала Tk и Tk+1 между моментами прихода каждых двух следующих друг за другом зондирующих сигналов, где Tk=ti+1-ti и Tk+1=ti+2-ti+1, введены новые дополнительные признаки, а именно: до проведения измерений моментов времени приема ЗС и интервалов между ними уменьшают скорость перемещения приемника до минимальной величины, измеряют направление G0 на источник ЗС, выбирают направление U0 движения приемника ЗС таким образом, чтобы было обеспечено условие G0-U0=90° или G0-U0=270°, определяют соотношение между Tk и Tk+1: если Tk+1<Tk, то считают, что источник ЗС приближается к приемнику под углом, если Tk<Tk+1, то считают, что источник ЗС удаляется от приемника под углом, определяют курсовой угол перемещения источника зондирующих сигналов как КУ=arccos (Tk+1/Tk) или КУ=arccos (Tk/Tk+1) и если КУ равен или близок к 0, то считают, что источник ЗС совершает циркуляцию, при этом определяют и запоминают время tКУ1 первого момента и время tКУ2 второго момента, когда КУ равен или близок к 0, а время циркуляции определяют как tцирк=2 (tКУ2-tКУ1).
Поясним достижение технического результата.
Как правило, работа гидролокатора, установленного на быстро перемещающемся носителе, являющимся источником ЗС, имеет своей целью обзор пространства и обнаружение какого-либо объекта по наличию от него эхосигнала. Дальность распространения зондирующего сигнала гидролокатора существенно больше, чем дальность обнаружения эхосигнала от обнаруживаемого объекта. Поэтому зондирующий сигнал обнаруживается приемным устройством системы обнаружения гидролокационных сигналов практически всегда при первых же сигналах излучения, вероятность пропуска такого сигнала прямого распространения чрезвычайно мала, а амплитуда принимаемых сигналов большая. Выбор порога на основании анализа шумов на входе приемного устройства не имеет смысла, поскольку уровни приходящих сигналов существенно превосходят помеху.
Источник зондирующих сигналов (гидролокатор), который установлен на подвижном носителе, имеет своей целью обнаружение нужного объекта, которым является любой корабль. Поэтому для обнаружения объекта задается постоянный угол поворота носителя гидролокатора (циркуляция), который осматривает пространство, двигаясь по окружности, с целью обнаружения отраженного эхосигнала от объекта. Как правило, этот угол является фиксированным для данного носителя гидролокатора, что будет определять постоянную величину изменения дистанции и курсового угла при его перемещении. За время циркуляции направление изменения курсового угла будет меняться 2 раза, когда каждая точка изменения направления будет характеризоваться тем, что Tk=ti+1-ti и Tk+1=ti+2-ti+1 будут мало отличаться, а их отношение будет равно 1 или близко к 1. Это говорит о том, что курсовой угол перемещения источника ЗС близок к 0° или к 180°. Эти две точки будут определять диаметр циркуляции, после чего можно найти время циркуляции.
Для уменьшения ошибки измерения времени ti приема зондирующего сигнала необходимо приемнику ЗС выбрать такое положение, которое минимизирует ошибку измерения. Для этого необходимо сбросить собственную скорость приемника до минимальной величины, после чего измерить направление G0 приема зондирующего сигнала и выбрать направление U0 собственного движения таким образом, чтобы угол между направлением на источник и направлением движения приемника равнялся 90° или 270°. Это обеспечит наименьшую ошибку измерения интервалов Tk и Tk+1. Поскольку дальность обнаружения зондирующего сигнала существенно больше дальности обнаружения эхо-сигнала гидролокатором поиска, то имеется возможность принять соответствующие меры для обеспечения безопасности приемника ЗС.
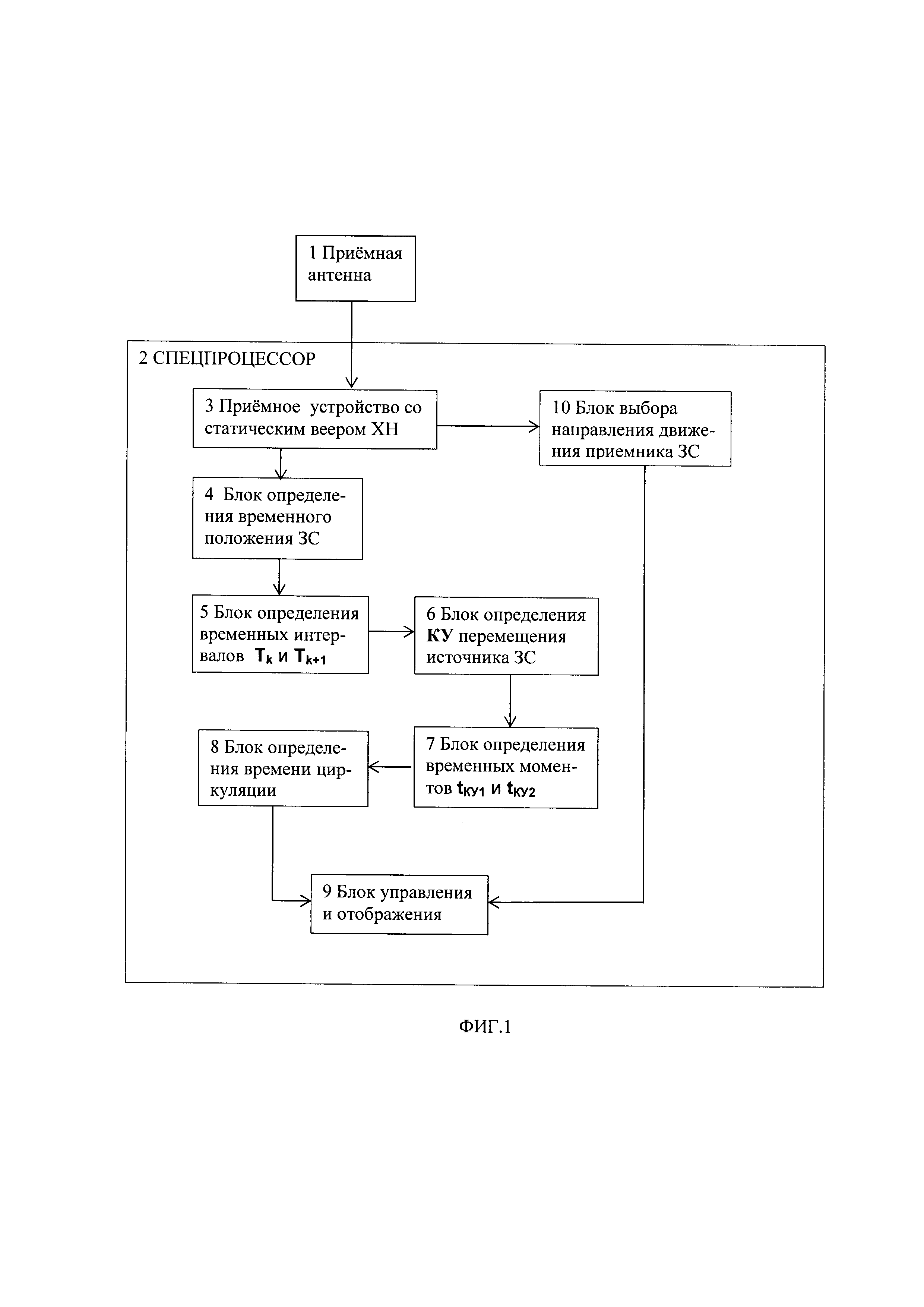
Сущность изобретения поясняется фиг. 1, на которой приведена блок схема устройства, реализующего предлагаемый способ.
Устройство (фиг. 1) содержит приемную антенну 1 системы обнаружения гидролокационных сигналов ОГС, соединенную с блоком 2 спецпроцессора, в состав которого входят последовательно соединенные приемное устройство 3, формирующее статический веер характеристик направленности (ХН), блок 4 определения временного положения ЗС, блок 5 определения временных интервалов Tk и Tk+1, блок 6 определения курсового угла КУ перемещения источника ЗС, блок 7 определения временных моментов tКУ1 и tКУ2, блок 8 определения времени циркуляции, блок 9 управления и отображения. Второй выход блока 3 через блок 10 выбора направления движения приемника ЗС соединен со вторым входом блока 9.
Работу предлагаемого способа целесообразно рассмотреть совместно с описанием работы устройства, реализующего способ.
Зондирующие сигналы движущегося источника (гидролокатора) принимаются антенной 1 и поступают на вход спецпроцессора 2, в который входит приемное устройство 3 со статическим веером характеристик направленности. В приемном устройстве 3 сигналы усиливаются, подвергаются фильтрации и преобразуются в цифровой вид, удобный для дальнейшей обработки и измерения с необходимой точностью. Приемная антенна 1, приемное устройство 3 являются известными устройствами, реализованными в системах ОГС. Сигналы, преобразованные в цифровой вид, обрабатываются специальными цифровыми процессорами на основе разработанных алгоритмов [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. «Корабельная гидроакустическая техника». СПб. Наука. - 2004. стр. 164-176, стр. 278-295]. Все системы ОГС разработаны с использованием статического веера характеристик направленности, который обеспечивает круговой обзор пространства, поскольку направление прихода зондирующего сигнала априорно не известно. Поэтому направление G0 на источник ЗС определяется по положению характеристики направленности, в которой обнаружен максимальный сигнал в блоке 3. Значение G0 передается в блок 10 выбора направления U0 оптимального движения приемника ЗС, обеспечивающего выполнение условия разности направлений G0 и U0, равной 90° или 270°. Значение U0 передается в блок 9 для принятия решения об изменении направления движения приемника ЗС. Принятые зондирующие сигналы поступают в блок 4, где определяется их временные положения, по которым в блоке 5 определяются временные интервалы Tk и Tk+1. Далее в блоке 6 по соотношению между Tk и Tk+1 определяются направление движения источника ЗС и курсовые углы КУ его перемещения. В блоке 7 определяются временные моменты tКУ1 и tКУ2, когда КУ перемещения источника ЗС равен или близок к 0, по которым в блоке 8 определяют время циркуляции, передаваемое в блок 9 управления и отображения для приема окончательного решения.
Способ определения параметров маневрирования источника зондирующих сигналов (ЗС), содержащий последовательный прием зондирующих сигналов перемещающегося источника, последовательное измерение моментов времени t приема n зондирующих сигналов, где n не менее 3-х, определение временных интервалов T и T между моментами прихода каждых двух следующих друг за другом зондирующих сигналов, где T=t-t, T=t-t, отличающийся тем, что до проведения измерений моментов времени приема зондирующих сигналов и интервалов между ними уменьшают скорость перемещения приемника до минимальной величины, измеряют направление G на источник ЗС, выбирают направление U движения приемника таким образом, чтобы было обеспечено условие G-U=90° или G-U=270°, определяют соотношение между T и T: если T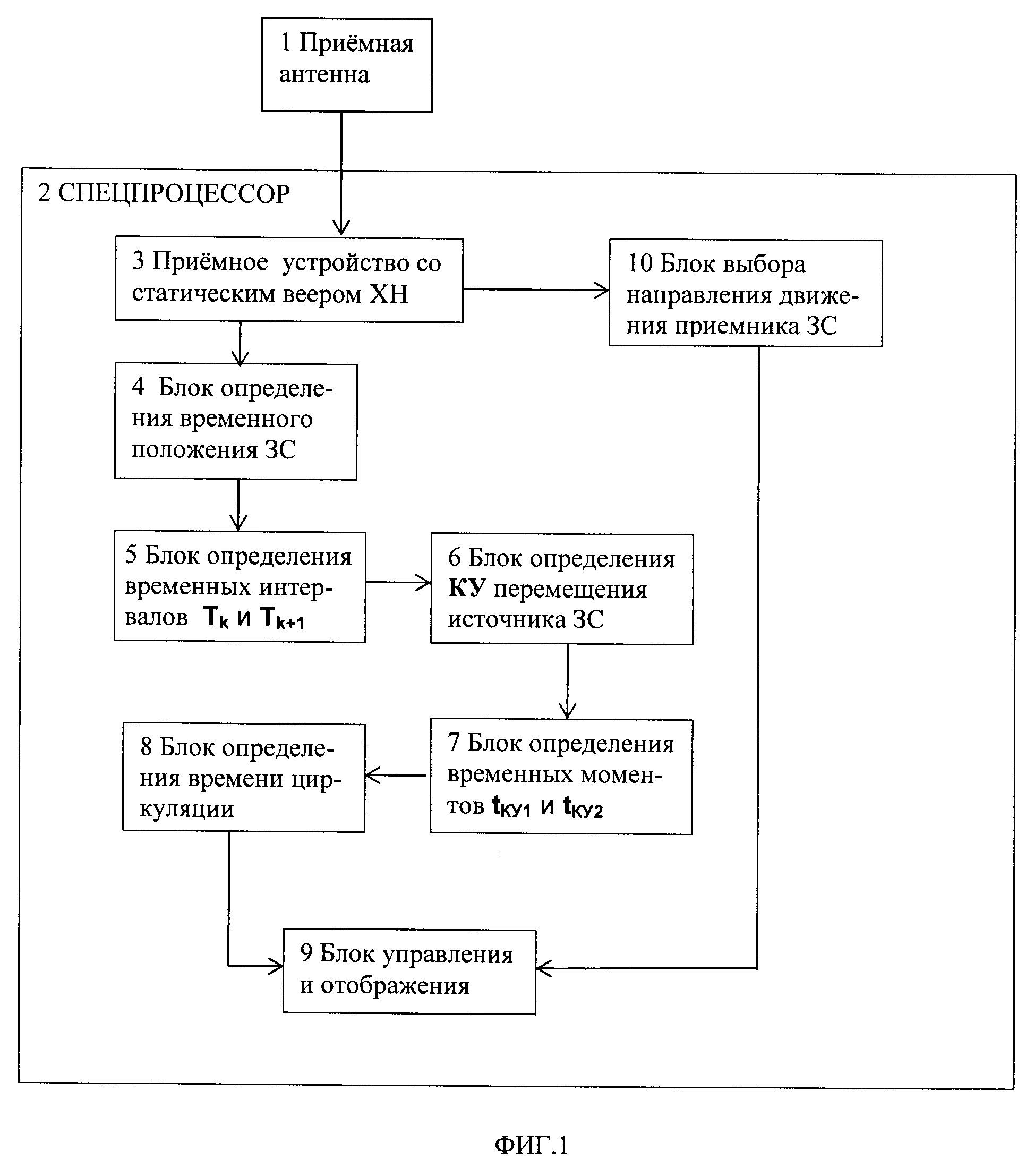
Устройство получения информации о шумящем в море объекте
Способ обработки гидролокационной информации
Акустическая излучающая система интенсификации нефтедобычи
Имитатор эхосигнала эхолота
Способ классификации гидроакустических сигналов шумоизлучения морского объекта
Гидроакустическая приемная многоэлементная антенна выпуклой формы двойной кривизны, размещаемая в носовой оконечности носителя
Способ управления скоростью и дальностью передачи в радиомодеме адаптивной радиолинии передачи потоков дискретной информации
Способ определения водоизмещения надводного корабля при его шумопеленговании
Способ определения координат подводного объекта гидроакустической системой подводной навигации с юстировочным маяком
Способ селекции эхо-сигналов в эхолоте
Способ измерения глубины объекта и гидролокатором
Способ обработки эхосигнала гидролокатора
Способ обработки гидролокационной информации
Система автоматической классификации гидролокатора ближнего действия
Способ определения осадки айсберга
Гидроакустический способ измерения дистанции с помощью взрывного источника
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Гидроакустический способ измерения дистанции с использованием взрывного сигнала
Способ определения осадки айсберга
Способ измерения дистанции до шумящего объекта

