Результат интеллектуальной деятельности: СПОСОБ ОБРАБОТКИ ГИДРОЛОКАЦИОННОЙ ИНФОРМАЦИИ
Вид РИД
Изобретение
Изобретение относится к активным гидроакустическим системам обнаружения и определения местоположения целей и может быть использовано в гидролокаторе для подавления мешающих эхосигналов.
Процесс гидролокации состоит в том, что антенна гидролокатора в режиме обзора излучает акустические зондирующие сигналы, в режиме приема осуществляется прием эхосигналов, отраженных от целей. Способы обработки гидролокационной информации заключаются в формировании статического веера диаграмм направленности (ДН), приеме эхосигналов по пространственным каналам, обработки эхосигналов и выводе информации на индикатор для принятия решения оператором об обнаружении интересующих его целей.
Известно, что наличие боковых лепестков диаграммы направленности (ДН) линейной фазированной антенной решетки в режиме приема ухудшает помехоустойчивость гидролокатора. В анизотропном поле помех возможна ситуация, когда амплитуда эхосигналов, принятых по боковым лепесткам диаграммы направленности, могут быть соизмеримы или даже больше полезного амплитуды эхосигнала принятого главным лепестком диаграммы направленности. Такая маскировка полезного эхосигнала увеличивает вероятность пропуска эхосигнала цели.
При работе гидролокатора в условиях изменяющегося уровня гидроакустических помех и реверберации при маневрировании носителя в узкостях, вблизи береговой линии, при движении по судоходным каналам, вследствие приема эхосигналов по боковым лепесткам диаграммы направленности, гидроакустическая информация - изображение целей на индикаторе гидролокатора представляется оператору “размытым” и затрудняется процесс обнаружения интересующих его целей.
Задача подавления мешающих эхосигналов в гидролокаторе является актуальной.
Задача обнаружения интересующих целей оператором в сложных гидроакустических условиях (проход узкостей, работа в мелком море и вблизи береговой линии, дна и т.д.) представляется чрезвычайно трудной, и поэтому на индикатор необходимо выводить информацию только о целях, представляющих интерес.
Известно, что теоретический уровень первого бокового лепестка ДН при равномерном амплитудном распределении для линейной фазированной антенной решетки достигает 22% (Найт У.С. и др. «Цифровая обработка сигналов в гидролокационных системах». 621.391.861.883. ТИИЭР, т. 69, №11 ноябрь 1981 г., с. 105…107, рис. 22).
Для уменьшения уровня боковых лепестков ДН применяются широко известные способы весовой обработки выходных сигналов элементов линейной фазированной антенной решетки (ЛФАР). Например, в качестве весовой функции может применяться “окно” Хемминга, но при этом происходит расширение главного лепестка ДН и снижение коэффициента концентрации ЛФАР за счет уменьшения используемой апертуры ЛФАР, что снижает угловое разрешение гидролокатора (Найт У.С. и др. «Цифровая обработка сигналов в гидролокационных системах». 621.391.861.883. ТИИЭР, т. 69, №11 ноябрь 1981 г., с. 106; Бурдик B.C. «Анализ гидроакустических систем».Ленинград, "Судостроение" 1988 г. С. 293, 294, рис. 11.10).
Известен способ обработки гидролокационной информации, описанный в статье (Dimitri Alexandrou, Christian De Moustie «Adaptive Noise Canceling Apptied to Sea Beam Sidelobe Interference Rejection», IEEE JOURNAL OF OCEANICE ENGINEERING Vol. 13, N2, April 1988, www:ccom.unh.edu/…/Alexandrou_1988_IEEE_ada).
Способ реализован в многолучевом эхолоте Sea Beam (МЛЭ) с опцией подавления эхосигналов, принятых боковыми лепестками ДН, с использованием опорного канала.
Недостатком указанного аналога является использование опорного канала для оценки вклада эхосигналов, принятых по боковым лепесткам ДН.
В качестве опорного канала выбирается одна из веера приемных ДН. Выбор опорного канала является сложной задачей и во многом зависит от гидроакустических условий работы многолучевого эхолота.
При некорректном выборе опорного канала происходит искажение полезных эхо сигналов, что является не допустимым.
Известен способ обработки гидролокационной информации, описанный в статье (Кривцов А.П. «Алгоритм коррекции углового спектра эхо-сигнала в многолучевом эхолоте с ЛЧМ зондирующим сигналом». III Всероссийская конференция «Радиолокация и радиосвязь» - ИРЭ РАН, 26-30 октября 2009 г. www:jre.cplire.ru/jre/library/3conference/conf3rd.pdf), в котором в каждом цикле «излучение-прием» излучают зондирующие сигналы в водную среду, принимают отраженные эхосигналы, формируют статический веер диаграмм направленности, формируют исходный цифровой массив амплитуд эхосигналов по совокупности пространственных каналов, определяют коэффициенты подавления эхосигналов по боковым лепесткам ДН, производят обработку исходного цифрового массива амплитуд эхосигналов с целью подавления мешающих эхосигналов, отображают цифровой массив амплитуд эхосигналов, прошедший подавление мешающих эхосигналов, на индикаторе. Этот способ является наиболее близким к предлагаемому способу по количеству общих признаков и выбран в качестве прототипа. В способе-прототипе при известных параметрах линейной фазированной антенной решетки (количество элементов, шаг их установки, амплитудное распределение) и в известных условиях (характеристик водной среды) гидролокационного зондирования коэффициенты эхосигналов по боковым лепесткам ДН, могут быть вычислены.
В реальных условиях гидролокационной съемки использование вычисленных коэффициентов не корректно из-за изменчивости характеристик водной среды и донной поверхности.
Определение этих коэффициентов производят так.
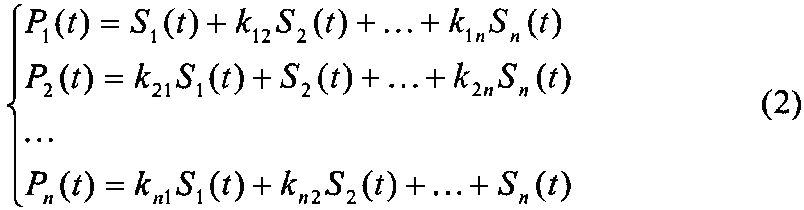
S1(t), S2(t), …, Sn(t) эхосигналы, приходящие с направлений, задаваемых углами прихода α1, α2, …αn, t - время прихода сигнала, n - количество пространственных каналов в статическом веере ДН. В пространственном канале, в направлении α1, эхосигнал P1(t) определяется уравнением

где k12, …, k1n - коэффициенты подавления эхосигналов по боковым лепесткам ДН с направлений, задаваемых углами α2, …, αn.
Эхосигналы в других пространственных каналах описываются системой уравнений:
где kij - коэффициенты подавления эхосигнала по боковым лепесткам ДН с направления αj при формировании пространственного канала в направлении αi; Pi(t) - эхосигнал, как функция времени, принимаемый в процессе гидролокационной съемки в пространственном канале направления αi.
В реальных условиях гидролокационной съемки вычисление коэффициентов kij не корректно из-за изменчивости характеристик водной среды, поэтому коэффициенты определялись непосредственно по данным гидролокационного зондирования донной поверхности.
Определение коэффициентов k1j для первого уравнения системы уравнений (2) производилось путем отыскания минимума функции

Здесь Pi(tl) - эхосигналы, принимаемые в пространственных каналах с направлений, задаваемых углами αi в моменты времени tl. Суммирование в (3) производилось по данным одного цикла «излучения - прием» эхосигнала. L - число отсчетов эхосигнала в строке данных.
Коэффициенты k12, …, k1n находятся решением системы уравнений:
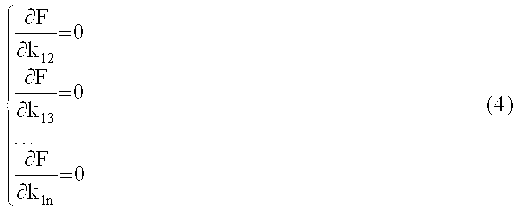
или в развернутом виде:
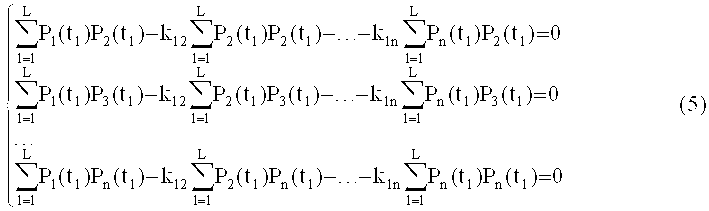
Решением системы уравнений(5) относительно k1j получают набор коэффициентов k1j. Определение коэффициентов для других уравнений системы (2) дают полный набор коэффициентов kij.
Недостатком способа-прототипа является то, что коэффициенты kij подавления эхосигналов по боковым лепесткам ДН находятся путем процедуры их статистического усреднения, для которой требуется накопление определенного количества исходных данных, полученных с процессе гидролокационной съемки донной поверхности с простым и ровным рельефом, что не всегда выполнимо в районе плавания, т.к. сложный рельеф дна и его изменение от зондирования к зондированию дает неверную оценку коэффициентов подавления эхосигналов по боковым лепесткам ДН. Из-за изменчивости характеристик водной среды и донной поверхности, необходимо периодически пересчитывать коэффициенты подавления эхосигналов по боковым лепесткам ДН. Вычисление коэффициентов подавления эхосигналов по боковым лепесткам ДН требует значительной вычислительной мощности и временных затрат. Отсутствие возможности изменения уровня подавления мешающих эхосигналов путем оперативного ввода коэффициентов подавления эхосигналов по боковым лепесткам ДН также является недостатком способа
Задачей изобретения является повышение помехоустойчивости приемного тракта гидролокатора для минимизации вероятности пропуска эхосигнала цели.
Технический результат заключается в подавлении мешающих эхосигналов путем пороговой обработки исходного массива амплитуд эхосигналов.
Для обеспечения указанного технического результата в способ обработки гидролокационной информации, в котором в каждом цикле «излучение-прием» излучают зондирующие сигналы в водную среду, принимают отраженные эхосигналы, формируют статический веер диаграмм направленности, формируют исходный цифровой массив амплитуд эхосигналов по совокупности пространственных каналов, определяют коэффициенты подавления эхосигналов, принятых по боковым лепесткам диаграмм направленности в пространственных каналах, отображают цифровой массив амплитуд эхосигналов, прошедший подавление мешающих эхосигналов, на индикаторе введены новые признаки, а именно:
на индикаторе визуально анализируют исходный цифровой массив амплитуд эхосигналов A(j, i), где i - номер временного среза на шкале времени на интервале зондирования, j - номер пространственного канала, 1≤j≤n, где n - количество формируемых пространственных каналов, по результатам анализа устанавливают значение коэффициента подавления эхосигналов, принимаемых по боковым лепесткам диаграмм направленности k, причем 1≤k≤(1/R), где R - величина первого бокового лепестка диаграммы направленности формируемого статического веера, подавляют мешающие эхосигналы, принятые по боковым лепесткам диаграмм направленности в исходном цифровом массиве амплитуд эхосигналов A(j,i) согласно правилу

где AR(j, i) и AL(j, i) - массивы первого и второго порогов подавления для эхосигналов j-го пространственного канала для каждого i-го временного среза, которые определяют из исходного цифрового массива амплитуд эхосигналов A(j, i), так
AL(j, i)=k×A(j-1, i), AR(j, i)=k×A(j+1, i),
причем принимают для j=1, AL(j, i)=0 и для j=n, AR(j, i)=0, A1(j, i) - цифровой массив амплитуд эхосигналов, прошедший подавление мешающих эхосигналов в j-м пространственном канале в момент времени i при k=1, последовательно увеличивают значение коэффициента k, причем k выбирают из диапазона 1≤k≤(1/R), где R - величина первого бокового лепестка диаграммы направленности формируемого статического веера, каждый раз при вновь введенном коэффициенте k повторяют процедуру определения A1(j, i) и наблюдают на экране индикатора за отображением мешающих целей, после того как количество мешающих целей становится минимальным, изменение коэффициента k прекращают, а полученный массив A1(j, i) на индикаторе считают результатом обработки гидролокационной информации.
Сущность предлагаемого способа заключается в следующем. Обычно функции обнаружения и оценивания координат обнаруженных целей выполняется оператором гидролокатора. Гидролокатор представляет оператору на индикаторе индикационную картину в координатах: - курсовой угол - дальность, третьей координатой является либо яркость, либо цвет отметки цели, характеризующие амплитуду эхосигнала цели, которая пропорциональна силе цели. Известно, что эхосигналы, принятые по боковым лепесткам ДН, маскируют эхосигнал, принятый по главному лепестку ДН, что приводит к снижению помехоустойчивости гидролокатора в направлении главного лепестка ДН и к принятию оператором ошибочных решений по обнаружению целей.
В процессе работы оператор гидролокатора в каждом цикле «излучение - прием» анализирует представленную на индикаторе гидроакустическую информацию - массив амплитуд эхосигналов A(j, i), в виде яркостных (цветных) отметок от целей, яркость(цвет) которых пропорциональна амплитуде их эхосигналов, в координатах: курсовой угол - дистанция (время).
В случае, если яркостные (цветные) отметки от целей постоянно флюктуируют, представляются нечеткими и “размытыми”, то это затрудняет обнаружение интересующих целей. Оператор, изменяя значение коэффициента подавления k, добивается подавления мешающих целей, обеспечивая минимизацию вероятности пропуска эхосигнала цели по главному лепестку ДН.
Сущность способа обработки гидролокационной информации поясняется на фиг. 1, 2, 3. На фиг. 1, 2, 3 представлено графическое пояснение процесса подавления мешающих эхосигналов в пространственных каналах, принимаемых по боковым лепесткам ДН.
Предложенный способ реализуется следующим образом.
В каждом цикле «излучение - прием» в режиме излучения антенна гидролокатора излучает акустические зондирующие сигналы в водную среду. В режиме приема осуществляется прием эхосигналов, отраженных от целей, которые поступают на вход диаграммоформирующего устройства (ДФН), формирующего статический веер диаграмм направленности. На выходе ДФУ формируется по всей совокупности пространственных каналов исходный массив амплитуд эхосигналов. Исходный массив амплитуд эхосигналов поступает на обработку. В сложных гидрологических условиях постоянно меняется уровень амплитуды эхосигналов, принятых по боковым лепесткам ДН, что обуславливает флуктуации амплитуд эхосигналов некоторых целей на индикаторе. Оперативная регулировка уровня подавления мешающих эхосигналов, принятых по боковым лепесткам ДН, в условиях меняющихся гидрологических условиях, позволяет оператору минимизировать вероятность пропуска эхосигнала цели в направлении главного лепестка ДН, для этого, на основе анализа гидроакустической информации, представленной на индикаторе, оператор вначале вводит коэффициент подавления k=1. При коэффициенте подавления k=1 степень подавления мешающих эхосигналов минимальная.
Подавляют мешающие эхосигналы, принятые по боковым лепесткам диаграмм направленности в исходном цифровом массиве амплитуд эхосигналов A(j,i) согласно правилу:

где AL(j, i) и AR(j, i) - массивы первого и второго порогов подавления для эхосигналов j-го пространственного канала и для каждого i-го временного среза, которые определяют из исходного цифрового массива амплитуд эхосигналов A(j, i), так
AL(j, i)=k×A(j-1, i), AR(j, i)=k×A(j+1, i)
где коэффициент подавления эхосигналов, принимаемых по боковым лепесткам диаграмм направленности k.
Для крайних пространственных каналов, т.е. для j=1, принимают AL(j, i)=0 и для j=n принимают AR(j, i)=0.
A1(j, i) - цифровой массив амплитуд эхосигналов, прошедший подавление мешающих эхосигналов в j-м пространственном канале в момент времени i при k=1.
Последовательно увеличивают значение коэффициента подавления k, при увеличении значения коэффициента подавления эхосигналов k количество подавленных мешающих эхосигналов увеличивается, причем k выбирают из диапазона 1≤k≤(1/R), где R - величина первого бокового лепестка диаграммы направленности формируемого статического веера. Значение R для различных антенн приведены в источнике (Л.А.Орлов, А.А.Шабров. «Гидроакустическая аппаратура рыбопромыслового флота». Ленинград, “Судостроение”, 1987 г., с. 100, табл. 2, 3).
При коэффициенте подавления k=(1/R) степень подавления мешающих эхосигналов максимальная.
Каждый раз при вновь введенном коэффициенте k повторяют процедуру определения A1(j, i) и наблюдают на экране индикатора за отображением мешающих целей, после того, как количество мешающих целей становится минимальным, изменение коэффициента k прекращают, а полученный массив A1(j, i) на индикаторе считают результатом обработки гидролокационной информации.
При вводе значения коэффициента подавления эхосигналов k=0 массив амплитуд эхосигналов, прошедший подавление мешающих эхосигналов A1(j, i), равен исходному массиву амплитуд A(j, i), в результате, подавление мешающих эхосигналов не происходит, то есть на индикаторе отображается исходный массив амплитуд.
В результате, оператор в каждом цикле «излучение-прием» анализирует изображения гидроакустической информации на индикаторе и при необходимости, изменяет значение коэффициента подавления k, добивается большего подавления мешающих эхосигналов, обеспечивая минимизацию вероятности пропуска эхосигнала цели по главному лепестку ДН.
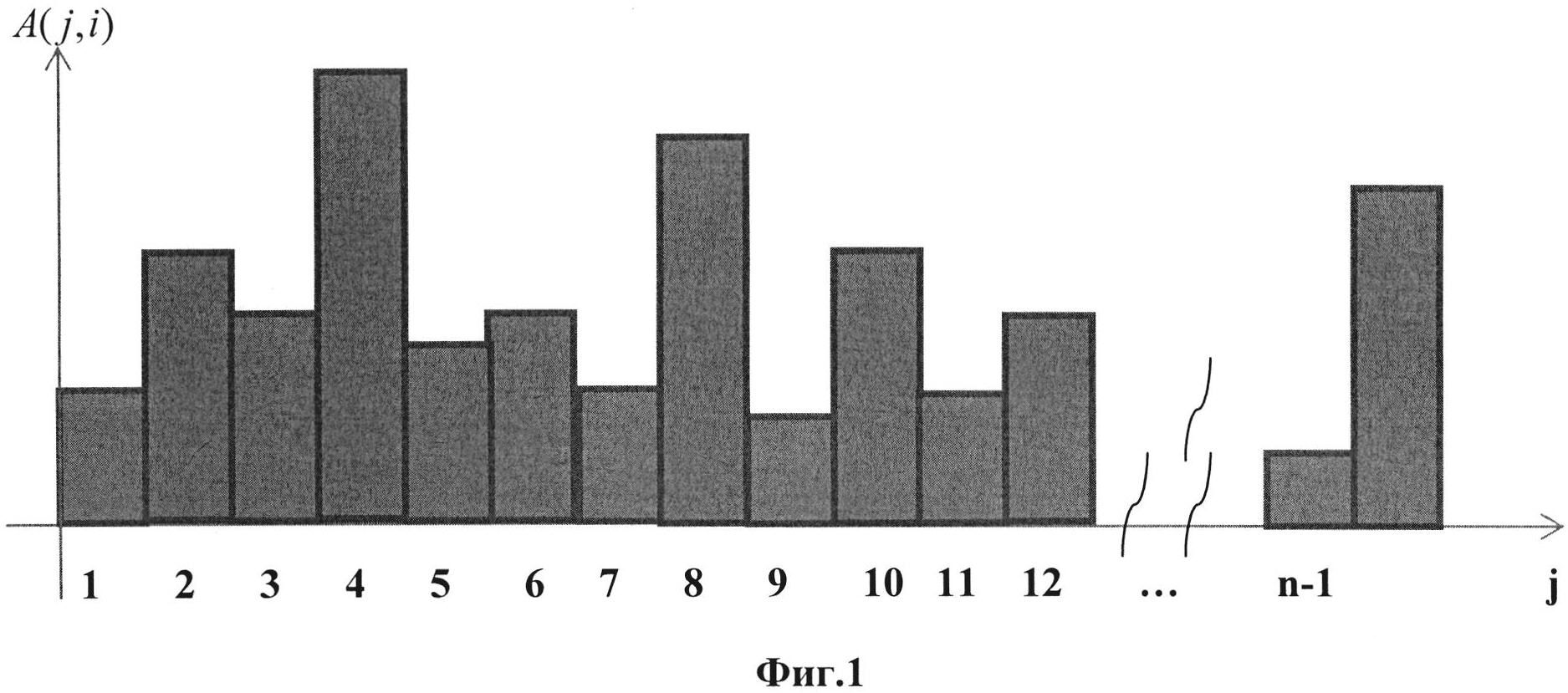
На фиг. 1 представлен i-й временной срез исходного массива амплитуд эхосигналов A(j, i). На фиг. 2 представлен i-й временной срез массива амплитуд эхосигналов A1(j, i), прошедший подавление мешающих эхосигналов, при коэффициенте подавления эхосигналов k=1.
На фиг. 3 представлен i-й временной срез массива амплитуд эхосигналов A1(j, i), прошедший подавление мешающих эхосигналов, при коэффициенте подавления эхосигналов k=2.
На фиг 1. видно, что амплитуда эхосигналов в пространственных каналах 2, 4, 6, 8, 10 больше, чем в каналах, соответственно, 1 и 3,3 и 5,5 и 7,7 и 9,9 и 11, которые, соответственно, являются для них порогами AL(j, i) и AR(j, i).
На фиг. 2 видно, что при коэффициенте подавления эхосигналов k=1, после подавления мешающих эхосигналов, амплитуда эхосигналов в пространственных каналах 2, 4, 6, 8, 10 осталась неизменной. В каналах 1, 3, 5, 7, 9, 11 амплитуда эхосигналов обратилась в ноль так, как в этих пространственных каналах амплитуда эхосигналов оказалась меньше в сравнении с соседними для них пространственными каналами.
На фиг. 3 видно, что при коэффициенте подавления эхосигналов k=2, после подавления мешающих эхосигналов амплитуда эхосигналов в пространственных каналах 4, 8, 10 остались неизменными так, как их амплитуда оказалась более чем в два раза больше, чем в соседних с ними пространственных каналах.
В каналах 1, 2, 3, 5, 6, 7, 9, 11 амплитуда эхосигналов обратилась в ноль так, как в этих пространственных каналах амплитуда эхосигналов не оказалась равной и не превысила более чем в два раза амплитуду в соседних с ними пространственных каналах.
Аппаратная реализация предлагаемого способа обработки гидроакустической информации может быть выполнена, как патент РФ №2529441. «Способ обработки гидролокационной информации».
Таким образом, предложенный способ обработки гидролокационной информации по подавлению мешающих эхосигналов в исходном массиве амплитуд эхосигналов пространственных каналов позволяет произвести их подавление и регулировать уровень подавления путем ввода коэффициента подавления, при этом минимизируется вероятность пропуска эхосигнала от цели и предоставляет на индикаторе обработанный массив эхосигналов от целей оператору.
Таким образом, технический результат предлагаемого изобретения достигнут.
Способ обработки гидролокационной информации, в котором в каждом цикле «излучение-прием» излучают зондирующие сигналы в водную среду, принимают отраженные эхосигналы, формируют статический веер диаграмм направленности, формируют исходный цифровой массив амплитуд эхосигналов по совокупности пространственных каналов, определяют коэффициенты подавления эхосигналов, принятых по боковым лепесткам диаграмм направленности в пространственных каналах, отображают цифровой массив амплитуд эхосигналов, прошедший подавление мешающих эхосигналов, на индикаторе,отличающийся тем, чтона индикаторе визуально анализируют исходный цифровой массив амплитуд эхосигналов A(j, i), где i - номер временного среза на шкале времени на интервале зондирования, j - номер пространственного канала, 1≤j≤n, где n - количество формируемых пространственных каналов, по результатам анализа устанавливают значение коэффициента подавления эхосигналов, принимаемых по боковым лепесткам диаграмм направленности k, причем 1≤k≤(1/R), где R - величина первого бокового лепестка диаграммы направленности формируемого статического веера,подавляют мешающие эхосигналы, принятые по боковым лепесткам диаграмм направленности в исходном цифровом массиве амплитуд эхосигналов A(j, i) согласно правилу: где AR(j, i) и AL(j, i) - массивы первого и второго порогов подавления для эхосигналов j-го пространственного канала для каждого i-го временного среза, которые определяют из исходного цифрового массива амплитуд эхосигналов A(j, i) так , ,причем принимают для j=1, AL(j, i)=0 и для j=n, AR(j, i)=0, A(j, i) - цифровой массив амплитуд эхосигналов, прошедший подавление мешающих эхосигналов в j-м пространственном канале в момент времени i при k=1, последовательно увеличивают значение коэффициента k, причем k выбирают из диапазона 1≤k≤(1/R), где R - величина первого бокового лепестка диаграммы направленности формируемого статического веера, каждый раз при вновь введенном коэффициенте k повторяют процедуру определения А(j, i) и наблюдают на экране индикатора за отображением мешающих целей, после того как количество мешающих целей становится минимальным, изменение коэффициента k прекращают, а полученный массив A(j, i) на индикаторе считают результатом обработки гидролокационной информации.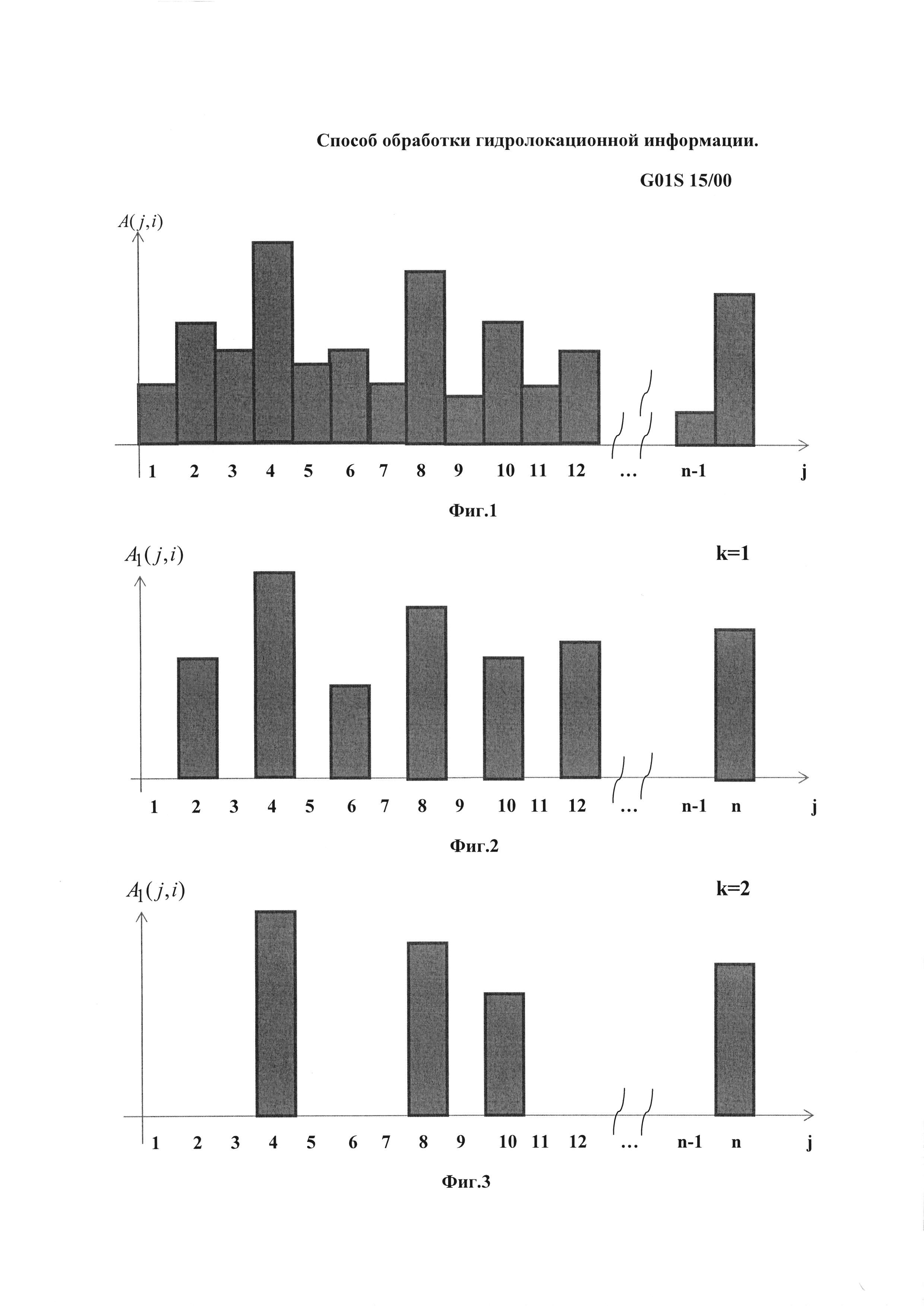



Эхолот с ледовой защитой
Способ обработки сигнала шумоизлучения объекта
Антенная система эхолота для надводного корабля
Способ измерения скорости звука
Гидроакустический способ определения пространственных характеристик объекта на дне
Гидроакустический способ обработки рыбопромысловой информации
Гидролокационный способ обнаружения подводных объектов в контролируемой акватории
Способ измерения радиальной скорости объекта по его шумоизлучению
Способ цветового кодирования информации гидроакустического шумопеленгования
Гидроакустический способ измерения глубины погружения неподвижного объекта
Эхолот с ледовой защитой
Способ обработки сигнала шумоизлучения объекта
Антенная система эхолота для надводного корабля
Способ измерения скорости звука
Гидроакустический способ определения пространственных характеристик объекта на дне
Гидроакустический способ обработки рыбопромысловой информации
Гидролокационный способ обнаружения подводных объектов в контролируемой акватории
Способ измерения радиальной скорости объекта по его шумоизлучению
Способ цветового кодирования информации гидроакустического шумопеленгования
Гидроакустический способ измерения глубины погружения неподвижного объекта

