Результат интеллектуальной деятельности: ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ С ИСПОЛЬЗОВАНИЕМ ВЗРЫВНОГО СИГНАЛА
Вид РИД
Изобретение
Предлагаемый способ измерения дистанции цели относится к области гидроакустики и предназначен для систем обработки информации в приемных трактах режима активной локации гидроакустических комплексов при использовании зондирующего взрывного сигнала.
Известны взрывные источники гидроакустических сигналов, которые применяются для различных целей: исследование параметров гидроакустического канала, геофизические исследования, акустическая навигация, звукоподводная связь, управление подводными объектами, морская геология, активная гидролокация [1, 2, 3, 5, 6].
Преимущества применения взрывных источников сигнала в гидролокации заключаются в том, что с их помощью можно получить информацию об отражателе в широком диапазоне частот. Кроме того, взрывные источники обладают большой мощностью; не требуется сложной аппаратуры.
Известен [7] способ активной гидролокации, использующий излучение зондирующего сигнала, прием эхосигнала, преобразование акустического сигнала в электрический гидроакустической антенной, спектральный анализ этого процесса, представляющего собой смесь полезного сигнала и шумовой помехи, детектирование спектральных составляющих, интегрирование их огибающих и обнаружение сигнала путем сравнения с порогом. В момент превышения выбранного порога определяется время задержки эхосигнала и по нему высчитывается дистанция до цели.
Аналогичный способ активной гидролокации изложен в [9] и включает многоканальную по частоте фильтрацию принятых эхосигналов, детектирование, выделение огибающей и сравнение ее с порогом. По частотному каналу с максимальной амплитудой сигнала определяется смещение спектра, которое пропорционально радиальной скорости цели, а по моменту превышения выбранного порога определяется задержка эхосигнала и дистанция до цели.
Недостатком этих способов обнаружения цели, где предполагается размещение излучателя и приемника на одном носителе (например, ПЛ, НК, вертолет), является отсутствие скрытности носителя, что ставит под угрозу его существование.
Способ локации цели с применением взрывного сигнала изложен в [4]; данный способ выбран в качестве прототипа предлагаемого способа.
Этот способ состоит в том, что одно судно удаляется от второго, приемного судна, сбрасывая в воду через определенные промежутки времени заряды, а приемное судно, с помощью гидроакустических средств, принимает эхосигналы, которые усиливаются, фильтруются, детектируются, интегрируются и фиксируются на индикаторе.
Недостатком этого способа является отсутствие возможности определения дистанции до цели при имеющем место разнесении излучателя и приемника.
Задачей предлагаемого изобретения является определение дистанции до цели в режиме активной гидролокации с применением взрывных источников звука.
Техническим результатом изобретения является обеспечение измерения дистанции и скрытности носителя ГАК - приемника г/а сигналов, например, ПЛ, НК. При этом скрытность обеспечивается сбрасыванием взрывных источников любыми средством доставки и приведения излучения в любом месте и в любое известное время при приеме эхосигналов. Определение дистанции до объекта обеспечивается заявляемой обработкой принимаемых сигналов.
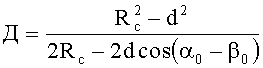
Для обеспечения указанного технического результата в способ измерения дистанции, содержащий излучение взрывного источника сигналов, прием эхосигнала от объекта, фильтрацию эхосигнала, детектирование, интегрирование, пороговый анализ и вывод информации на индикатор, введены новые признаки, а именно: сигнал взрывного источника излучают на удалении от точки приема на фиксированной глубине и в фиксированное время Тиз, прием сигналов взрывного источника осуществляют статическим веером характеристик направленности, измеряют уровень помехи по всем пространственным каналам, выбирают порог, принимают сигнал прямого распространения от источника взрывного сигнала до точки приема, определяют направление прихода (пеленг) сигнала прямого распространения α0, определяют время прихода сигнала прямого распространения Тпр, рассчитывают дистанцию от точки приема до источника взрывного сигнала d=(Тпр-Тиз)С, где С - скорость звука в воде, принимают эхосигнал, отраженный от объекта, определяют направление (пеленг) β0 прихода эхосигнала, определяют время прихода эхосигнала Тэс, определяется время распространения взрывного сигнала от источника до приемника tc=(Тэс-Тиз), определяют дистанцию распространения сигнала от источника до объекта и от объекта до точки приема Rc=C*tc, определяется разность углов (α0-β0) между направлением «приемник - источник излучения» и направлением «приемник - объект», определяется дистанция Д до объекта по формуле:
Использование взрывного источника не требует вспомогательного оборудования, он обладает большой мощностью, имеет широкий спектр при излучении зондирующего сигнала и не имеет ограничения по глубине, что позволяет его использовать практически всегда при любых условиях распространения.
Взрывной источник может быть установлен вспомогательным судном, сброшен с самолета или вертолета, или доставлен самоходным автономным аппаратом. Удаление взрывного источника от носителя приемной системы обеспечивает скрытность носителя. Глубина срабатывания взрывного источника может быть установлена таким образом, чтобы было обеспечено обнаружение объекта при любом разрезе скорости звука. Таким образом, с помощью взрывного сигнала может быть определена дальность практически до любого объекта. При этом дальность находится решением косоугольного треугольника, стороны и углы которого определяются с использованием предложенной в процедурой.
Сущность изобретения поясняется фиг.1, 2, где на фиг.1 представлена блок-схема устройства, реализующая предлагаемый способ, на фиг.2 приведены пояснения к способу.
Устройство (фиг.1) содержит источник 1 взрывного сигнала с установкой времени срабатывания. Антенна 2 подключена к приемному устройству 3 через блок 4 формирования статического веера характеристик направленности, первый выход которого соединен с первым входом процессора 5. Процессор 5 содержит последовательно соединенные блок 7 измерения помехи, блок 8 выбора порога, соединенный с первым входом блока 8 измерения времен прихода сигнала, блок 9 измерения угла прихода сигнала прямого распространения, первый вход блока 11 определения дистанции, второй вход которого соединен с блоком 12 исходных данных. Второй выход блока 4 статического веера характеристик направленности соединен со вторым входом блока 6 измерения времен прихода, второй выход которого соединен со вторым входом блока 11 определения дистанции, а третий выход блока 6 соединен через блок 10 измерения угла прихода эхосигнала с третьим входом блока 11 определения дистанции.
Блок статического веера характеристик направленности является известным устройством, которое находит широкое применение в современной гидроакустике. Примеры гидролокационных устройств приведены в [10], где рассмотрена гидроакустическая станция, в которой реализуется статический веер характеристик направленности. Станция имеет также цифровую вычислительную машину, которая обрабатывает принятые эхосигналы.
Пример предложенного способа целесообразно рассмотреть совместно с работой реализующего способ устройства.
Взрывной источник сигнала, установленный предварительно с помощью воздушных и плавательных средств, срабатывает в установленное время, которое хранится в блоке 12 исходных данных. Сигнал от взрывного источника распространяется во все стороны равномерно, в т.ч. в сторону расположения приемного устройства и в сторону нахождения искомого отражателя (объекта). Дистанция от излучателя до приемного устройства меньше, чем суммарная дистанция «излучатель - объект» и «объект - приемное устройство». Сигнал прямого распространения принимается антенной 2, усиливается и фильтруется приемным устройством 3, и через блок 4 статического веера характеристики направленности поступает на спецпроцессор 5. Информация от каждой характеристики направленности поступает на спецпроцессор 5 для измерения помехи в блоке 7 и выбора порога в блоке 8, и непосредственно на блок 6, где происходит обнаружение сигнала прямого распространения и эхосигнала, отраженного от объекта, а также измерение времен прихода Тпр и Тэс. Измерение помехи в блоке 7 производится до момента излучения и практически при включении самого устройства. Измеряется значение помехи по всем пространственным каналам и по этому значению вырабатывается порог принятия решения в блоке 8. Величина порога передается в блок 6 для определения наличия эхосигнала и измерения его времени обнаружения. Для сигнала прямого распространения этот порог не имеет существенного значения, поскольку сигнал прямого распространения приходит непосредственно на антенну и имеет большой уровень относительно помехи. В блоке 12 хранятся исходные данные по временам срабатывания поставленных взрывных источников. При этом каждый источник имеет свое фиксированное время срабатывания. Если в блоке 6 измерения времени прихода фиксируется превышение помехи сигналом, имеющим длительность, равную длительности исходного сигнала, то измеряется время приема сигнала прямого распространения, по которому определяется дистанция до источника взрывного сигнала d=(Тпр-Тиз)С. Одновременно в блоке 9 происходит измерение угла α0, по которому пришел сигнал прямого распространения. С этого момента ожидается прием сигналов, отраженных от объектов, находящихся в радиусе действия гидролокатора. По каждому сигналу фиксируется время приема эхосигнала Тэс и направление прихода эхосигнала β0. По измеренному времени приема эхосигнала определяется суммарное время распространения tc=(Тэс-Тиз) и суммарная дистанция Rc=Ctc. По этим величинам вычисляется в блоке 11 дистанция Д до объекта.
Определение дистанция Д поясняется фиг.2. Приемное устройств (точка приема), взрывной источник и объект составляют косоугольный треугольник, в котором известна одна сторона, равная дистанции между источником излучения взрывного сигнала и приемником, и известна сумма двух других сторон, равная дистанции между источником излучения взрывного сигнала, объектом и точкой приема. Для нахождения стороны косоугольного треугольника необходимо найти хотя бы угол между двумя сторонами. Этот угол можно определить, если известно направление на источник взрывного сигнала α0 и направление прихода эхосигнала β0.
Таким образом, используя установку взрывного источника излучения с фиксированным временем срабатывания и пространственную и временную обработку, можно обнаруживать любые подводные объекты, измерять до них дистанцию и обеспечить скрытную работу приемного устройства.
Источники информации
1. Лаврентьев Э.В., Кузян О.И. Взрывы в море. Л., «Судостроение». 1977. Стр. 122-143.
2. Урик Р.Д. Основы гидроакустики. Пер. с англ. Н.М. Гусева и др. Л., «Судостроение». 1978. Стр. 106-118.
3. Физические основы подводной акустики. Пер с англ. под ред. В.И. Мясищева. Сов. Радио. М., 1955. Стр.258-345.
4. Акустика океана. Под ред. акад. Л.М. Бреховских. «Наука». М., 1974. Стр.202-203, 207-209.
5. Коул Р. Подводные взрывы. ИЛ. М., 1950.
6. Вестон Д. Взрывные источники звука. Сб. «Подводная акустика». Пер. с англ. под ред. проф. Л.М. Бреховских. «Мир». 1965. Стр.63-80.
7. Евтютов Е.С., Митько В.Б. Примеры инженерных расчетов в гидроакустике. «Судостроение». 1981 г. Стр. 77.
8. Справочник по гидроакустике. «Судостроение». 1988. Стр.27.
9. B.C. Бурдик. Анализ гидроакустических систем. «Судостроение». 1988. Стр.347.
10. Митько В.Б., Евтютов А.П., Гущин С.Е. Гидроакустические средства связи и наблюдения. «Судостроение». Л., 1982 г. Стр.138.
Гидроакустический способ измерения дистанции цели с использованием взрывного сигнала в режиме активной локации, содержащий излучение взрывного источника сигналов, прием эхосигналов от целей, фильтрацию, детектирование, интегрирование, отличающийся тем, что взрывной источник имеет фиксированную глубину установки и фиксированное время срабатывания Т, прием сигналов взрывного источника осуществляется статическим веером характеристик направленности, измеряется уровень помехи по всем пространственным каналам, выбирается порог, принимается сигнал прямого распространения от источника взрывного сигнала до приемного устройства, определяется направление α прихода сигнала прямого распространения, определяется время прихода сигнала прямого распространения Т, определяется дистанция от приемника до источника излучения d=(Т-Т)С, где С - скорость звука, принимается эхосигнал, отраженный от объекта, определяется направление β прихода эхосигнала от объекта, определяется время прихода эхосигнала, Т, определяется время распространения от источника до объекта и до приемника t=(Т-Т), определяется дистанция распространения от источника до объекта и до приемника R=Ct, определяется разность углов между направлением на источник излучения и направлением на приемник эхосигнала (α-β), определяется дистанция до цели по формуле:
Способ обнаружения и классификации сигнала от цели
Способ определения глубины погружения приводняющегося объекта
Способ классификации объекта, обнаруженного гидролокатором
Способ измерения параметров перемещения источника зондирующих сигналов
Гидроакустическая система
Способ пассивного определения координат источников излучения
Способ измерения толщины льда с подводного носителя
Способ определения скорости звука
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Способ определения ошибки оценки дистанции гидролокатором
Способ обнаружения и классификации сигнала от цели
Способ определения глубины погружения приводняющегося объекта
Способ классификации объекта, обнаруженного гидролокатором
Способ измерения параметров перемещения источника зондирующих сигналов
Гидроакустическая система
Способ пассивного определения координат источников излучения
Способ измерения толщины льда с подводного носителя
Способ определения скорости звука
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Способ определения ошибки оценки дистанции гидролокатором

