Результат интеллектуальной деятельности: УСТРОЙСТВО ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и предназначено для определения параметров объектов, шумящих в море.
В понятие «информация о шумящем в море объекте» обычно [1] вкладывают три основные характеристики: направление на шумящий объект, дистанция до объекта, класс объекта, под которым понимают разделение объектов на объекты малой шумности и объекты большой шумности. Для разделения объектов на классы шумности производят определение уровня шумности объекта. При этом предполагают, что к объектам малой шумности можно отнести подводные объекты, а к объектам большой шумности - боевые надводные корабли и гражданские суда. Понятно, что возможность определения глубины погружения объекта была бы желательна как для уточнения класса объекта, так и для получения более полной информации о нем.
Известно устройство [2] определения шумности объекта, основанное на оценке мощности принятого сигнала и дальнейшего пересчета этой оценки в предполагаемую точку излучения в горизонтальной плоскости. Для реализации такого подхода необходима предварительная оценка дистанции до шумящего объекта, которая используется как параметр. В устройстве не предполагается учет глубины погружения объекта, то есть не учитывается явление фокусировки сигнала после многолучевой рефракции в вертикальной плоскости при распространении в среде, которое может значительно изменять мощность сигнала, принятого с разных глубин погружения источника, при одном горизонтальном удалении.
Известно устройство [3] оценки дистанции до шумящего в море объекта, которое использует физическое явление частотно-зависимого затухания сигнала при распространении в среде. Устройство хорошо работает в мелком море, когда вследствие сильного влияния дна явлением рефракции лучей можно пренебречь. Однако в глубоком море, при наличии зональной структуры гидроакустического поля, явление рефракции проявляется сильно. В результате происходит фокусировка лучей, которая вносит вклад в численные параметры затухания сигнала, сравнимый по значению величин с параметрами частотно-зависимого затухания. При оценке дистанции до объекта будет допущена ошибка смещения, которая приведет к ошибке смещения при дальнейшем определении шумности объекта устройством [2].
Известно устройство совместной оценки дистанции до шумящего объекта и его шумности, описанное в [1], в котором для классов малой и большой шумности в блок прогнозного расчета закладывается фиксированная глубина погружения. Однако при этом не удается получить явные численные оценки обоих параметров: дистанции до объекта и шумности объекта. Оценки производятся оператором «на глаз» путем сопоставления цвета трассы сигнала с цветовыми шкалами классов по дистанции. Кроме того, градация шумности объекта производится только на две альтернативы: большая шумность и малая шумность при двух фиксированных глубинах погружения источника сигнала. Это не позволяет использовать при последующей обработке известную зависимость шумности объекта от скорости его движения [2].
Наиболее близким аналогом по используемым признакам и решаемым задачам к предлагаемому изобретению является устройство реализации способа получения информации о шумящих в море объектах [4], которое принято за прототип.
Устройство-прототип содержит следующие последовательно соединенные блоки:
многоэлементную акустическую приемную антенну шумопеленгования;
блок формирования веера характеристик направленности в горизонтальной и вертикальной плоскостях;
блок полосовой фильтрации;
детектор;
накопитель;
блок расчета отношения сигнал/помеха;
блок обнаружения объекта и определения направления на него.
Недостатком устройства-прототипа является невозможность получения полной совокупности информации о шумящем в море объекте. Устройство позволяет только обнаружить объект и определить направление на него.
Задачей заявляемого устройства является получение возможности определения полной совокупности информации о шумящем в море объекте (направление на объект, дистанция до объекта, класс шумности объекта, глубина погружения объекта) в одном устройстве и увеличение точности оценки шумности объекта путем учета многолучевости распространения сигнала в вертикальной плоскости.
Для решения поставленной задачи в устройство получения информации о шумящем в море объекте, содержащее последовательно соединенные многоэлементную акустическую приемную антенну шумопеленгования, блок формирования веера характеристик направленности в горизонтальной и вертикальной плоскостях, блок полосовой фильтрации, детектор, накопитель, блок расчета отношения сигнал/помеха, вычисляющий значения отношения сигнал/помеха для набора частотных диапазонов (не менее трех) в каждом из углов наклона характеристики направленности в вертикальной плоскости (не менее трех) для каждого горизонтального направления, блок обнаружения объекта с определением направления на него,
введен новый блок формирования матрицы замера и последовательно соединенные блоки:
блок измерения вертикального разреза скорости звука,
блок расчета поля,
блок формирования матрицы прогноза по сетке дистанция-глубина,
блок формирования двумерной функции меры сходства,
блок совместного определения дистанции и глубины,
блок определения шумности,
при этом выход блока обнаружения объекта и определения направления на него соединен с входом блока формирования матрицы замера, первый выход блока формирования матрицы замера соединен с блоком формирования двумерной функции меры сходства, второй выход блока формирования матрицы замера соединен со вторым входом блока определения шумности, а второй выход блока формирования матрицы прогноза по сетке дистанция-глубина соединен с третьим входом блока определения шумности,
при этом блок формирования матрицы замера для каждого обнаруженного объекта формирует матрицу замера, представляющую собой совокупность значений отношений сигнал/помеха для набора частотных диапазонов и углов наклона характеристики направленности в вертикальной плоскости,
блок расчета поля выполнен в виде вычислителя, реализующего расчет траектории звуковых лучей в плоскости дистанция-глубина и расчет аномалии распространения сигнала вдоль траектории лучей,
блок формирования матрицы прогноза по сетке дистанция-глубина выполнен в виде вычислителя, реализующего расчет прогнозных отношений сигнал/помеха для совокупности частотных диапазонов и углов наклона характеристики направленности в вертикальной плоскости в каждой точке сетки дистанция-глубина,
блок формирования двумерной функции меры сходства выполнен в виде вычислителя, реализующего расчет мер сходства между матрицей замера и матрицей прогноза в каждой точке сетки дистанция-глубина,
блок совместного определения дистанции и глубины выполнен в виде вычислителя, реализующего поиск аргументов (точки дистанция-глубина) двумерной функции меры сходства, при которых она имеет экстремум,
блок определения шумности выполнен в виде вычислителя, реализующего расчет шумности объекта на основании матрицы замера и матрицы прогноза в выбранной точке сетки дистанция-глубина.
Техническим результатом изобретения является повышение точности оценки шумности объекта и определение полной совокупности информации о шумящем в море объекте (направление на объект, дистанция до объекта, класс шумности объекта, глубина погружения объекта) в одном устройстве.
Покажем возможность достижения указанного технического результата предложенным способом.
Известно [5], что мощность шумового сигнала, принятого антенной после распространения в среде от точки излучения к точке приема, можно записать в виде произведения трех множителей:

Первый множитель представляет собой спектральную плотность мощности сигнала в точке излучения:

где Р0(1,1,1) - давление шума на частоте 1 кГц, в полосе 1 Гц на расстоянии 1 м от акустического центра источника, f - частота, n - показатель степенной зависимости от частоты спектральной плотности мощности сигнала в точке излучения.
Второй множитель представляет собой частотно-зависимое затухание сигнала при его распространении в среде на заданное расстояние в горизонтальной плоскости:

где β(f) - частотно-зависимый коэффициент затухания, r - дистанция до источника сигнала.
Третий множитель представляет собой аномалию распространения сигнала, связанную с рефракцией звуковых лучей в слоисто-неоднородной среде:

где FFi(r, h, θ) - фактор фокусировки луча i, приходящего из точки (r, h) в точку расположения носителя под углом θ в вертикальной плоскости, r - дистанция до источника сигнала, h - глубина погружения источника сигнала, Vt - коэффициент отражения от поверхности, Wb - коэффициент отражения от дна, θ - угол прихода луча в вертикальной плоскости.
При этом фактор фокусировки, входящий в выражение для аномалии, не может быть записан аналитическим выражением, а вычисляется в дискретных точках сетки дистанция-глубина после расчета траектории звуковых лучей.
В известном устройстве оценки дистанции [3] используют только явление частотно-зависимого затухания сигнала в среде (второй множитель), предполагая мощность сигнала в точке излучения (первый множитель) известной, а аномалию распространения (третий множитель) незначительной. В мелком море, в том случае, когда звуковые лучи, достигая дна, в большей степени поглощаются им, это оправданно. Однако в глубоком море, в условиях изменения скорости звука по глубине возникает явление рефракции. Вследствие этого многие лучи, не достигая дна и поверхности, многократно претерпевают полное внутреннее отражение в среде. В [6] вводят понятие лучевой трубки, под которой понимают совокупность лучей, выходящих из источника и проходящих на некотором удалении от него через произвольно малый контур. В рамках лучевой теории можно считать, что звуковая энергия «течет» по лучевой трубке, не пересекая ее стенок. Тогда рефракция лучей приводит к изменению площади сечения лучевой трубки, которая сложным образом зависит от траектории лучей, то есть от координат точек лучей, входящих в состав трубки, в системе дистанция-глубина. В свою очередь, площадь сечения лучевой трубки определяет фактор фокусировки луча [6], от которого зависит аномалия распространения сигнала. Те лучи, которые достигнув дна или поверхности, не поглощаются, а отражаются обратно в воду, претерпевают дополнительное затухание, которое так же не учитывается вторым множителем. В работе [7] проведен анализ мощности принятого сигнала на одной дистанции от источника при его различных глубинах в зависимости от угла приема сигнала в вертикальной плоскости. Получено различие в мощности сигнала до 30 дБ. Таким образом, отсутствие учета аномалии распространения сигнала может приводить к смещению в оценках дистанции, и, как следствие, к смещению в оценках шумности цели при обратном пересчете мощности сигнала в точку излучения. Кроме того, именно учет аномалии распространения (третьего множителя), которая зависит от глубины и определяется во вновь введенных блоках, позволит одновременно с дистанцией до источника определять и глубину его погружения.
Новые блоки, вводимые в устройство, при совместной работе позволяют учесть аномалию распространения сигнала следующим образом. Блок измерения вертикального разреза скорости звука позволяет в динамике работы измерять и учитывать текущие гидролого-акустические условия, определяющие текущие траектории лучей. Блок расчета поля производит расчет траектории звуковых лучей, расчет факторов фокусировки лучей и аномалии распространения вдоль траектории лучей. Наличие блока расчета поля необходимо, поскольку аномалия распространения сигнала не может быть описана аналитическим выражением. Она описывается как сумма вкладов отдельных лучей, для каждого из которых программным способом строится траектория и рассчитываются факторы фокусировки вдоль трассы луча. Из этого вытекает и необходимость блока формирования двумерной функции меры сходства и блока совместного определения дистанции и глубины, которые совместно реализуют метод численного решения уравнения, а именно находят точку в координатах дальность-глубина, для которой матрица замера (принятого сигнала) совпадает с матрицей прогноза. Блок формирования матрицы замера и блок формирования матрицы прогноза по сетке дистанция-глубина формируют матрицу замера и матрицу прогноза в едином формате для возможности их дальнейшего сравнения. При этом формируемые матрицы содержат отношения сигнал/помеха не только в совокупности частотных диапазонов, что позволяет учитывать частотно-зависимое затухание сигнала, но и в совокупности углов наклона в вертикальной плоскости, что позволяет дополнительно учитывать зависимость аномалии распространения от угла прихода луча в вертикальной плоскости. Все блоки совместно позволяют определять дистанцию до объекта, глубину погружения объекта и шумность объекта в едином устройстве, используя единую физическую модель распространения сигнала и единый (общий) расчет поля.
Таким образом, погрешность оценки шумности объекта уменьшается относительно аналогов, осуществляющих оценку шумности объекта без учета аномалии многолучевого распространения сигнала в вертикальной плоскости (без учета глубины). Кроме того, заявляемое устройство позволяет расширить перечень параметров, входящих в понятие «информация о шумящем объекте», глубиной погружения объекта, которая может быть использована как для уточнения класса объекта (разделение на подводные и надводные), так и для уточнения местоположения объекта. Таким образом, заявляемое устройство позволяет определять полную совокупность информации о шумящем в море объекте.
Сущность изобретения поясняется Фиг. 1, на которой приведена блок-схема устройства получения информации о шумящем в море объекте.
Заявленное устройство (фиг. 1) содержит две ветки последовательно соединенных блоков.
В первой ветке последовательно соединены многоэлементная антенна шумопеленгования 1, блок 2 формирования веера характеристик направленности, блок 3 полосовой фильтрации, детектор 4, накопитель 5, блок 6 расчета отношения сигнал/помеха, блок 7 обнаружения объекта и определения направления на него, блок 11 формирования матрицы замера.
Во второй ветке последовательно соединены блок 8 измерения вертикального распределения скорости звука, блок 9 расчета поля, блок 10 формирования матрицы прогноза по сетке дистанция-глубина, блок 12 формирования двумерной функции меры сходства, блок 13 совместного определения дистанции и глубины, блок 14 определения шумности. Во второй ветке существует дополнительная связь между вторым выходом блока 10 и вторым входом блока 14.
Две ветки устройства соединены между собой двумя линиями связи: первый выход блока 11 соединен с входом блока 12, второй выход блока 11 соединен с третьим входом блока 14.
Многоэлементная антенна шумопеленгования известна из [8], при этом антенные модули могут быть выполнены согласно [9], а блок формирования веера характеристик направленности согласно [10]. Блок измерения вертикального распределения скорости звука может быть выполнен согласно [11]. Остальные блоки, в том числе вновь создаваемые, могут быть выполнены в модулях программируемых процессоров сигналов и в модулях универсальной части цифрового вычислительного комплекса [12].
В динамике работы устройства шумовой сигнал объектов, принятый антенной 1, поступает в блок 2, в котором формируется веер характеристик направленности (каналы наблюдения) в горизонтальной плоскости (каналы по горизонту) и вертикальной плоскости (каналы по углу места). Далее сигналы всех каналов наблюдения независимо поступают в блок полосовой фильтрации, в котором осуществляется полосовая фильтрация с формированием частотных диапазонов в каждом канале наблюдения. В блоках 4, 5 и 6 производится квадратичное детектирование, накопление сигнала во времени и расчет отношения сигнал/помеха для каждого частотного диапазона в каждом канале наблюдения независимо. В блоке 7 осуществляется процедура обнаружения объекта и процедура определения направления на обнаруженный объект. В блоке 11 для каждого обнаруженного объекта формируется матрица замера, состоящая из отношений сигнал/помеха в совокупности частотных диапазонов во всех каналах по углу места. Такой расширенный состав матрицы замера позволяет учитывать распределение сигнала в вертикальной плоскости. В дальнейшую обработку в блок 12 поступают матрицы замеров, относящиеся к обнаруженным объектам. По каждому объекту ведется независимая параллельная обработка в блоках 12, 13, 14.
В блоке 8 производится измерение скорости звука в зависимости от глубины в месте акватории, в котором находится носитель устройства. Это позволяет учитывать текущие гидролого-акустические условия распространения сигнала. Таблица измеренных значений скорости звука поступает в блок 9, в котором производится расчет траекторий звуковых лучей в плоскости дистанция-глубина и расчет аномалии распространения сигнала вдоль траектории каждого луча. Блок 9 позволяет учитывать аномалию распространения сигнала, обусловленную рефракцией звуковых лучей, и не учитываемую в способах-аналогах. В блоке 10, куда поступает аномалия распространения сигнала, производится формирование матрицы прогноза по сетке дистанция-глубина. Матрица прогноза в каждой точке сетки содержит отношения сигнал/помеха для совокупности частотных диапазонов приемной части устройства для всех каналов устройства по углу места. При расчете отношений сигнал/помеха учитываются как аномалия распространения сигнала в текущих гидролого-акустических условиях, так и частотно-зависимое затухание сигнала в среде. Расчет производится для единичной шумности сигнала в источнике.
В блок 12 для каждого объекта, обнаруженного в блоке 7, поступают две матрицы: из блока 11 матрица замера, из блока 10 матрица прогноза по сетке дистанция-глубина. В блоке 12 осуществляется расчет совокупности мер сходства между матрицей замера и матрицей прогноза в каждой точке сетки дистанция-глубина, из которых формируется двумерная функция меры сходства в зависимости от двух величин: дистанция и глубина. В качестве мер сходства может использоваться любая из известных мер сходства, например, коэффициент корреляции или евклидово расстояние.
Из блока 12 функция мер сходства поступает в блок 13, реализующий поиск аргументов двумерной функции мер сходства, при которых она имеет экстремум: максимум при использовании коэффициента корреляции или минимум при использовании евклидова расстояния. Полученные аргументы функции мер сходства являются оценками параметров дистанции до объекта и глубины погружения объекта, полученными совместно, что расширяет перечень информации о шумящем в море объекте относительно устройства-прототипа.
В блок 14 поступают: из блока 11 матрица замера, из блока 10 матрицы прогноза по сетке дистанция-глубина, из блока 13 полученные оценки дистанции и глубины. В блоке 14 производится выбор матрицы прогноза, соответствующей полученным значениям дистанции и глубины, выбор частотного диапазона и канала по углу места, в которых отношение сигнал/помеха матрицы замера максимально, и расчет шумности объекта путем деления выбранного отношения сигнал/помеха из матрицы замера на выбранное отношение сигнал/помеха в матрице прогноза. Это позволяет вычислять шумность объекта не только на основании дистанции до объекта, но с учетом глубины погружения объекта, то есть учитывая явление фокусировки сигнала после многолучевой рефракции в вертикальной плоскости при распространении в среде. Кроме того, при расчете шумности используется та же физическая модель среды, которая используется при вычислении дистанции и глубины. Это позволяет уменьшить погрешность оценки шумности цели и количество арифметических операций, связанных с пересчетом мощности сигнала в точку излучения.
Все изложенное позволяет считать задачу изобретения решенной. Предложено устройство получения информации о шумящем в море объекте, включающей данные по дальности, глубине погружения и шумности объекта одновременно и с повышенной точностью, которое может быть использовано в составе судовых гидроакустических средств наблюдения для определения параметров объектов, шумящих в море.
Источники информации
1. Величкин С.М., Миронов Д.Д., Антипов В.А., Зеленкова И.Д., Перельмутер Ю.С. Патент РФ №2156984 от 27.09.2000. Способ получения информации о шумящем в море объекте и способ получения цветовых шкал для него. МПК G01S 3/84.
2. Кобылянский В.В. Разработка алгоритмов классификации шумовых гидроакустических сигналов на основе использования акустико-конструктивных характеристик объектов излучения и моделей среды. Диссертация на соискание ученой степени к.т.н. Л.: ЦНИИ «Морфизприбор». 1982.
3. Голубев А.Г., Мисюченко И.Л. Патент РФ №2128848 от 10.04.1999. Способ измерения дальности до источника шумоизлучения. МПК G01S.
4. Антипов В.А., Величкин С.М., Обчинец О.Г., Пастор А.Ю., Подгайский Ю.П., Янпольская А.А. Патент РФ №2353946 от 27.04.2009. Способ получения информации о шумящих в море объектах. МПК G01S 3/80.
5. Евтютов А.П., Митько В.Б. Примеры инженерных расчетов в гидроакустике. Л.: Судостроение. 1981.
6. Бреховских Л.М., Лысанов Ю.П. Теоретические основы акустики океана. М.: Наука. 2007.
7. Консон А.Д., Корнеева В.Б. Пространственное сопровождение сигнала цели в условиях зональной структуры акустического поля // Морская радиоэлектроника. 2014. №2(48). С. 28-31.
8. Литвиненко С.Л. Патент РФ №2515133 от 10.05.2014. Сферическая гидроакустическая антенна. МПК G01S 15/00.
9. Смарышев М.Д., Черняховский А.Е., Иванов A.M., Шатохин А.В., Селезнев И.А., Никандров В.А., Маляров К.В., Барсуков Ю.В. Патент РФ №2539819 от 27.01.2015. Антенный модуль с цифровым выходом. МПК H04R 1/44.
10. Баскин В.В., Гришман Г.Д., Казаков М.Н., Криницкий A.M., Леоненок Б.И., Смарышев М.Д. Патент РФ №2293449 от 10.02.2007. Способ формирования частотно-независимой характеристики направленности рабочим сектором многоэлементной гидроакустической приемной круговой антенны. МПК H04R 1/44, G01S 15/02.
11. Полканов К.И., Романов В.Ю., Смелов Д.А. Патент РФ №2208223 от 10.07.2003. Измеритель скорости звука в жидких средах. МПК G01H 5/00.
12. Бетелин В.Б., Капустин Г.И., Кокурин В.А., Корякин Ю.А., Лисс А.Р., Немытов А.И., Першин А.С., Рыжиков А.В., Челпанов А.В., Шалин С.А. Патент РФ №2207620 от 10.03.2003. Цифровой вычислительный комплекс для обработки сигналов в гидроакустических системах. МПК G06F 15/16, G01S 15/88.
Устройство получения информации о шумящем в море объекте, содержащее последовательно соединенные многоэлементную акустическую приемную антенну шумопеленгования, блок формирования веера характеристик направленности в горизонтальной и вертикальной плоскостях, блок полосовой фильтрации, детектор, накопитель, блок расчета отношения сигнал/помеха, вычисляющий значения отношения сигнал/помеха для набора частотных диапазонов (не менее трех) в каждом из углов наклона характеристики направленности в вертикальной плоскости (не менее трех) для каждого горизонтального направления, блок обнаружения объекта с определением направления на него, отличающееся тем, что введен новый блок формирования матрицы замера и последовательно соединенные блоки: блок измерения вертикального разреза скорости звука, блок расчета поля, блок формирования матрицы прогноза по сетке дистанция-глубина, блок формирования двумерной функции меры сходства, блок совместного определения дистанции и глубины, блок определения шумности, при этом выход блока обнаружения объекта и определения направления на него соединен с входом блока формирования матрицы замера, первый выход блока формирования матрицы замера соединен с блоком формирования двумерной функции меры сходства, второй выход блока формирования матрицы замера соединен со вторым входом блока определения шумности, а второй выход блока формирования матрицы прогноза по сетке дистанция-глубина соединен с третьим входом блока определения шумности, при этом блок формирования матрицы замера для каждого обнаруженного объекта формирует матрицу замера, представляющую собой совокупность значений отношений сигнал/помеха для набора частотных диапазонов и углов наклона характеристики направленности в вертикальной плоскости, блок расчета поля выполнен в виде вычислителя, реализующего расчет траектории звуковых лучей в плоскости дистанция-глубина и расчет аномалии распространения сигнала вдоль траектории лучей, блок формирования матрицы прогноза по сетке дистанция-глубина выполнен в виде вычислителя, реализующего расчет прогнозных отношений сигнал/помеха для совокупности частотных диапазонов и углов наклона характеристики направленности в вертикальной плоскости в каждой точке сетки дистанция-глубина, блок формирования двумерной функции меры сходства выполнен в виде вычислителя, реализующего расчет мер сходства между матрицей замера и матрицей прогноза в каждой точке сетки дистанция-глубина, блок совместного определения дистанции и глубины выполнен в виде вычислителя, реализующего поиск аргументов (точки дистанция-глубина) двумерной функции меры сходства, при которых она имеет экстремум, блок определения шумности выполнен в виде вычислителя, реализующего расчет шумности объекта на основании матрицы замера и матрицы прогноза в выбранной точке сетки дистанция-глубина.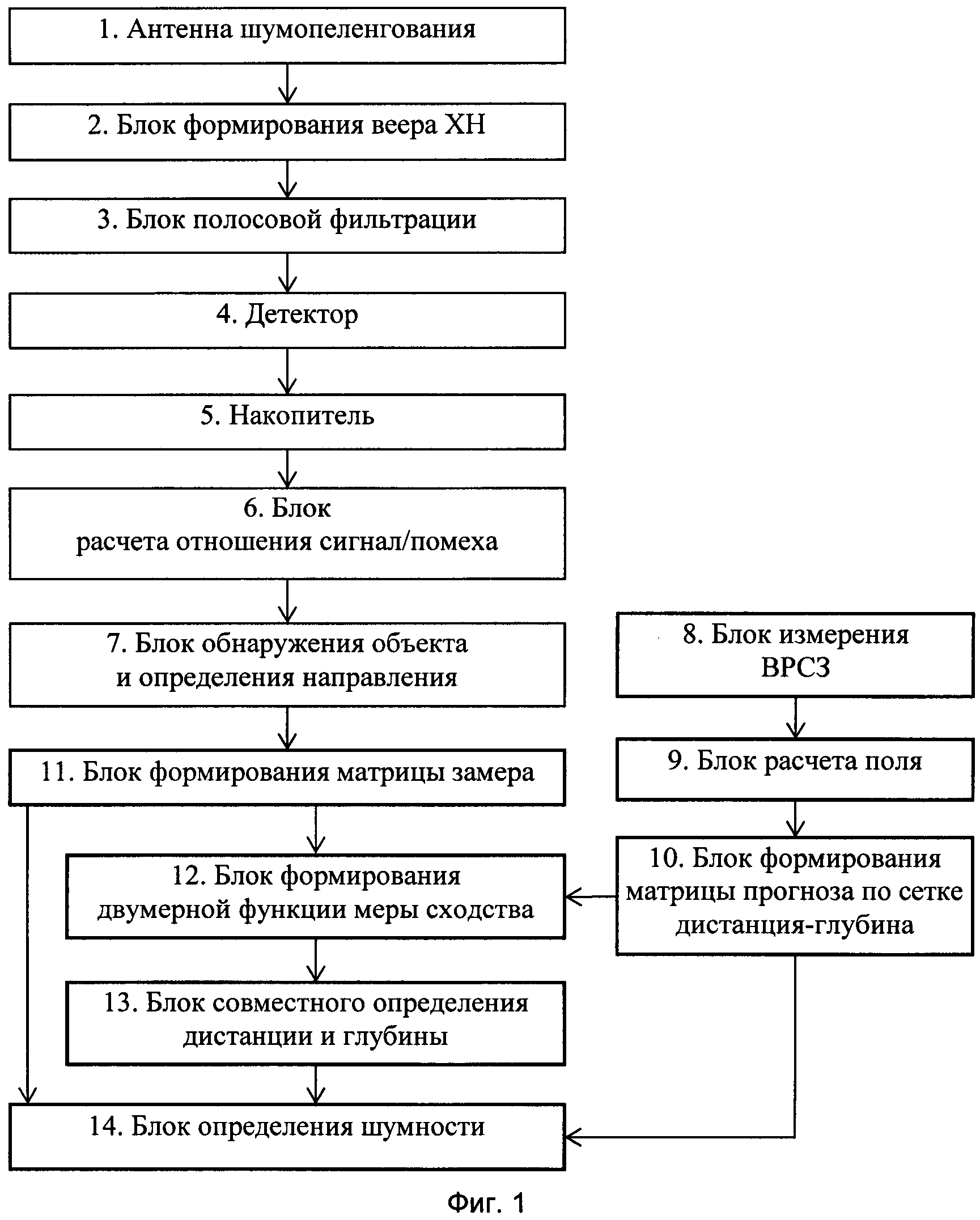
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Способ совместной оценки дистанции до шумящего в море объекта и его шумности
Способ оценки дистанции до шумящего в море объекта
Способ обработки сигнала шумоизлучения объекта
Способ интеграции систем обнаружения шумящих в море объектов
Антенная система эхолота для надводного корабля
Способ измерения скорости звука
Способ оценки количества лопастей винта шумящего в море объекта
Гидроакустический способ определения пространственных характеристик объекта на дне
Гидроакустический способ обработки рыбопромысловой информации
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Способ совместной оценки дистанции до шумящего в море объекта и его шумности
Способ оценки дистанции до шумящего в море объекта
Способ обработки сигнала шумоизлучения объекта
Способ интеграции систем обнаружения шумящих в море объектов
Антенная система эхолота для надводного корабля
Способ измерения скорости звука
Способ оценки количества лопастей винта шумящего в море объекта
Гидроакустический способ определения пространственных характеристик объекта на дне
Гидроакустический способ обработки рыбопромысловой информации

