Результат интеллектуальной деятельности: АВТОМАТ ПЕРЕКОСА ВЕРТОЛЕТА
Вид РИД
Изобретение
Изобретение относится к области авиационной техники и может быть использовано в системе управления вертолетом или в системе управления другим вертикально взлетающим аппаратом и направлено на устранение кинематической и динамической перекрестных связей в каналах управления.
Кинематическая перекрестная связь возникает, например, при наличии влияния перемещения в общем шаге на углы отклонения в циклическом шаге. Наличие перекрестной связи приводит к усложнению техники пилотирования из-за необходимости выполнения скоординированных действий пилота в каналах поперечного и продольного управлений при изменении положения общего шага. Динамическая перекрестная связь возникает при передаче усилий из одного канала управления на другой канал управления, например при передаче усилий из каналов циклического управления на канал управления общим шагом.
Часть конструктивных решений, примененных на заявляемом автомате перекоса, совпадает с конструктивными решениями, примененными на автомате перекоса вертолета, примененном на вертолетах типа Ми-8 (смотри, например, стр. 218 «Вертолет Ми -8МТВ» издательства «Транспорт» 1995 г.), а именно зависимость перемещения качалок продольного и поперечного управлений от перемещений ползуна по направляющей. Для уменьшения неизбежно возникающего при такой зависимости влияния управления по общему шагу на циклическое управление, как правило, применяют параллелограммные механизмы. Но из-за конструктивных ограничений обеспечить полное совпадение длин противоположных элементов (сторон) параллелограммных механизмов не удается, что приводит к появлению кинематической перекрестной связи в системе управления.
Известна также конструкция автомата перекоса (патент РФ 2088479 В64С 27/605, публ. 19.04.1994), в котором рычаг общего шага выполнен в виде качалки, закрепленной на корпусе редуктора, к одному концу которой крепится тяга бустера, а к другому внутреннее кольцо кардана, причем тяги продольного и поперечного управлений крепятся к наружному кольцу кардана. Недостатком данной схемы является наличие кинематической перекрестной связи в управлении циклическим шагом при изменении общего шага.
Известно также решение, смотри например патент US 2009242691 (А1) публ. 01.10.2009, в котором вращающаяся тарелка автомата перекоса управляется через сервоприводы, подсоединенные к невращающейся тарелке автомата перекоса, при этом управляющие сигналы от органов управления в кабине пилота преобразуются в управляющие перемещения сервоприводов с помощью электронного управления. В такой системе управления уменьшение кинематической перекрестной связи в управлении обеспечивается выбором соответствующих зависимостей (законов управления), связывающих органы управлений и сервоприводы, и изменяющих величину, скорость и направление движений сервоприводов с учетом обратной связи, заключающейся в контроле отклика летательного аппарата на перемещение органов управления. Таким образов, в такой модели системы управления уменьшение кинематических перекрестных связей в управлении достигается электронными средствами, обеспечивающими минимальную разницу между желаемой командой и реакцией воздушного судна. Такая электронная система управления требуется, как правило, в конвертопланах с поворотными винтами, в которых обеспечить требующиеся законы управления при помощи механических устройств затруднительно. Примененный в патенте US 2009242691 автомат перекоса управляется по общему шагу перемещением сразу трех сервоприводов, а для управления, по меньшей мере, одного из каналов циклического управления, требуется одновременное перемещение двух сервоприводов. Такая схема автомата перекоса, называемой как правило, схемой автоматом перекоса на трех сервоприводах и на сферической опоре требует применения либо дополнительного механического смесительного механизма, либо применения электронных систем. Недостатком применения смесительного механизма является увеличение веса и габаритов системы управления. Добавление еще одного элемента в систему управления, такого как смесительный механизм, приводит к снижению общей надежности. Недостатком применения электронных систем является меньшая надежность по сравнению с механическими системами управлений.
Ближайшим аналогом является схема автомата перекоса, представленная в патенте ЕР 3281869, В64С 27/605, публ. 14.02.2018 г. В одном из вариантов автомата перекоса, описанном в данном патенте, рычаг привода установлен с возможностью поворота на невращающейся скользящей втулке и приспособлен при воздействии управляющего усилия для осевого смещения невращающейся скользящей втулки, которая установлена на валу. Шарнирная опора приспособлена для обеспечения перемещения рычага исполнительного механизма, так что вращательное движение рычага исполнительного механизма на шарнирной опоре при воздействии управляющего усилия переводится в поворотное движение, по меньшей мере, один приводной рычаг на невращающейся скользящей втулке, который выполнен с возможностью осевого смещения на валу ротора невращающейся скользящей втулки, которая установлена на валу ротора. По меньшей мере, одна опора шарнира содержит, по меньшей мере, один несущий элемент, который приспособлен для переноса, по меньшей мере, одного рычага привода, причем, по меньшей мере, один несущий элемент содержит армированный волокнами композитный материал.
В патенте ЕР 3281869 качалки циклического управления размещаются на рычаге общего шага, что приводит к возможности возникновения перекрестной связи, выраженной во влиянии перемещения рычага общего шага на отклонения качалок циклического управления. При размещении качалок циклического управления на рычаге общего шага также возникают условия для передачи усилий из каналов циклического управления в канал управления общим шагом.
Техническая проблема, не решенная в известных устройствах, решение которой обеспечивается заявляемым изобретением, заключается в создании автомата перекоса, в котором отсутствует влияние перемещения в общем шаге на наклон тарелки, т.е. на циклическое управление, а также обеспечивается отсутствие передачи усилий из каналов циклического управления на канал управления общим шагом.
- и достигается размещением качалок продольного и поперечного управлений на рычаге общего шага, при этом соответствующие соотношения плеч на качалках продольного и поперечного управлений равны соответствующим соотношениям расстояний, определяющим расположение осей поворота указанных качалок на рычаге общего шага.
Технический результат заключается в устранении перекрестной связи при перемещении в общем шаге на величину угла наклона тарелки, т.е. на циклическое управление, а также в исключении передачи усилий из каналов циклического управления на канал управления общим шагом, что направлено на снижение нагрузки на пилота, в упрощении техники пилотирования вертолетом, в связи со снижением необходимого количества движений органами управления вертолетом, выполняемых пилотом, на всех режимах полета и снижением веса конструкции, связанной с уменьшением усилий действующих в канале общим шагом из-за отсутствия передачи усилий на канал общего шага от усилий из каналов циклическим управлением.
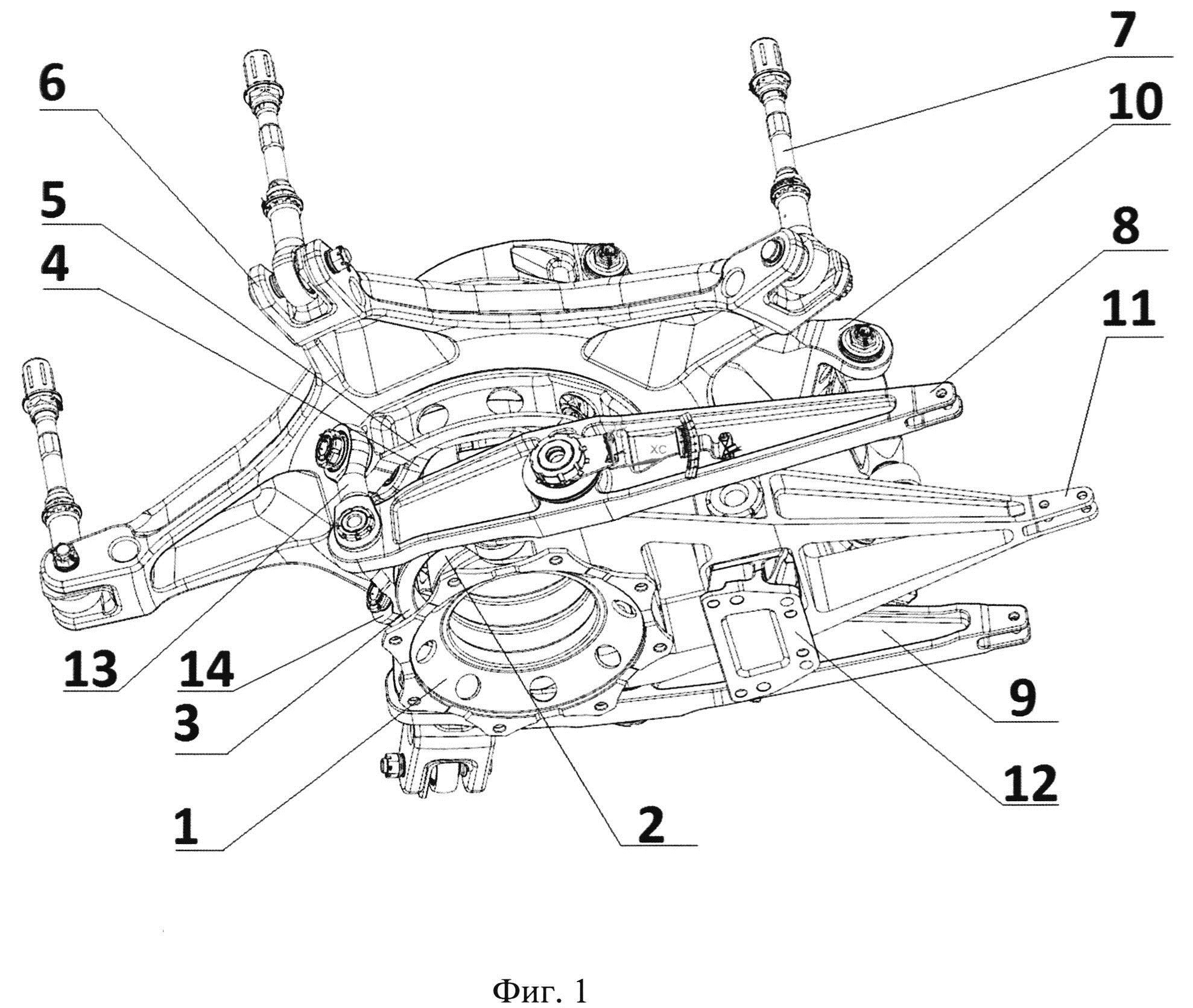
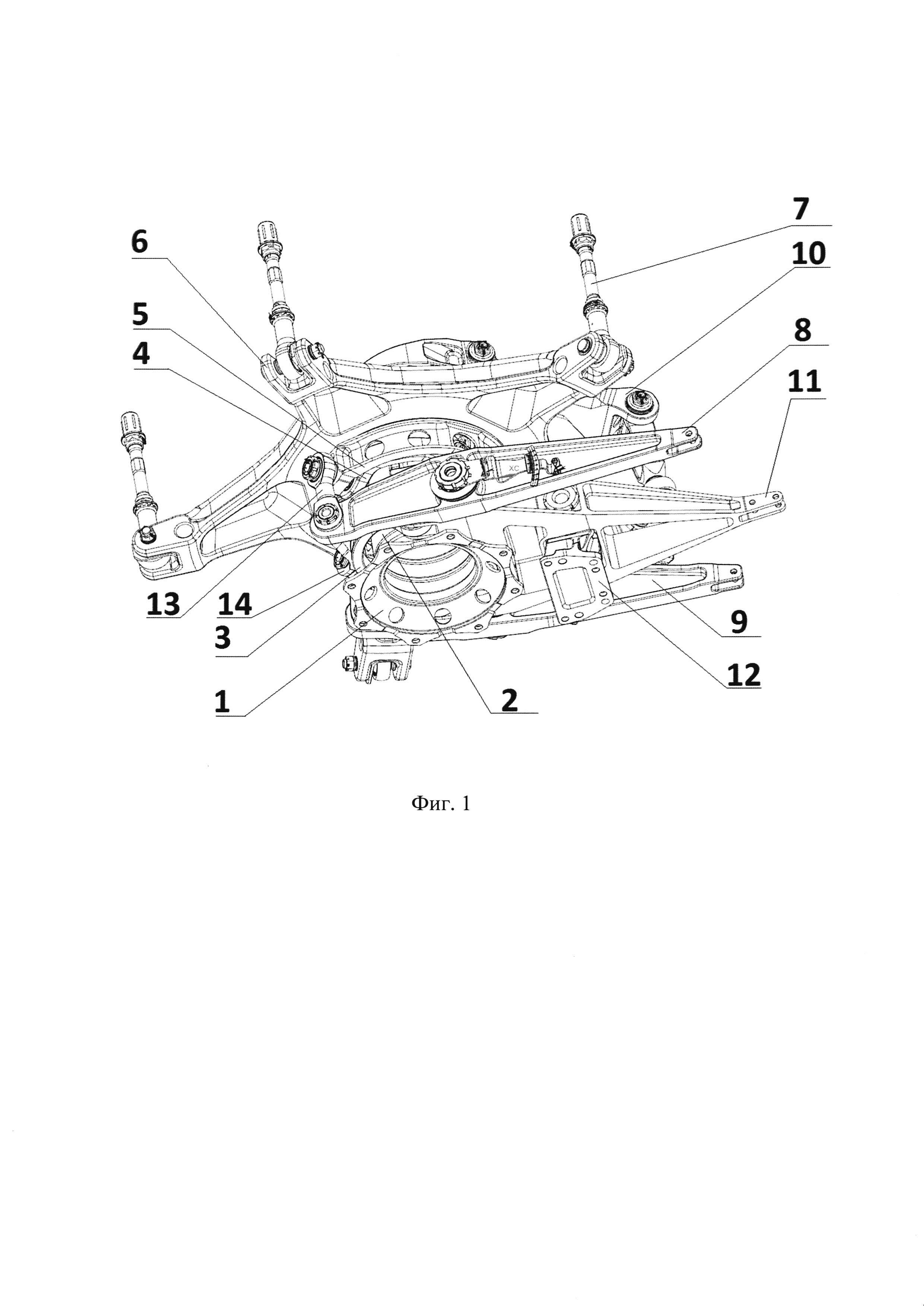
Технический результат достигается за счет того, что в автомате перекоса несущего винта вертолета, содержащем вращающуюся тарелку 6 с тягами поворота лопастей 7, соединенную с поводком 10 и установленную через подшипник на невращающееся наружное кольцо кардана 5, к которому шарнирно присоединены тяги продольного 13 и поперечного 14 управлений и связанное через подшипники с внутренним кольцом кардана 4, ползуном 2, скользящим по направляющей ползуна 1, серьгой 3, соединенной через подшипники с рычагом общего шага 11 с шарнирно закрепленными на нем качалками продольного 8 и поперечного 9 управления, каждая из которых шарнирно присоединена также к тягам продольного 13 и поперечного 14 управлений и кронштейном рычага общего шага 12, в соответствии с заявляемым изобретением, - в автомате перекоса применен выбор соотношения плеч качалок «a»,«b», «a1», «b1» продольного и поперечного управлений, связанных с соответствующими размерами расположения осей закрепления указанных качалок на рычаге общего шага «c»,«d», «c1», «d1» исходя из следующих условий:

, где а и b - плечи качалки продольного управления 8;
с и d - размеры на рычаге общего шага 11, определяющие расположение оси качалки продольного управления 8;
a1 и b1 - плечи качалки поперечного управления 9;
c1 и d1 размеры на рычаге общего шага 11, определяющие расположение оси качалки поперечного управления 9.
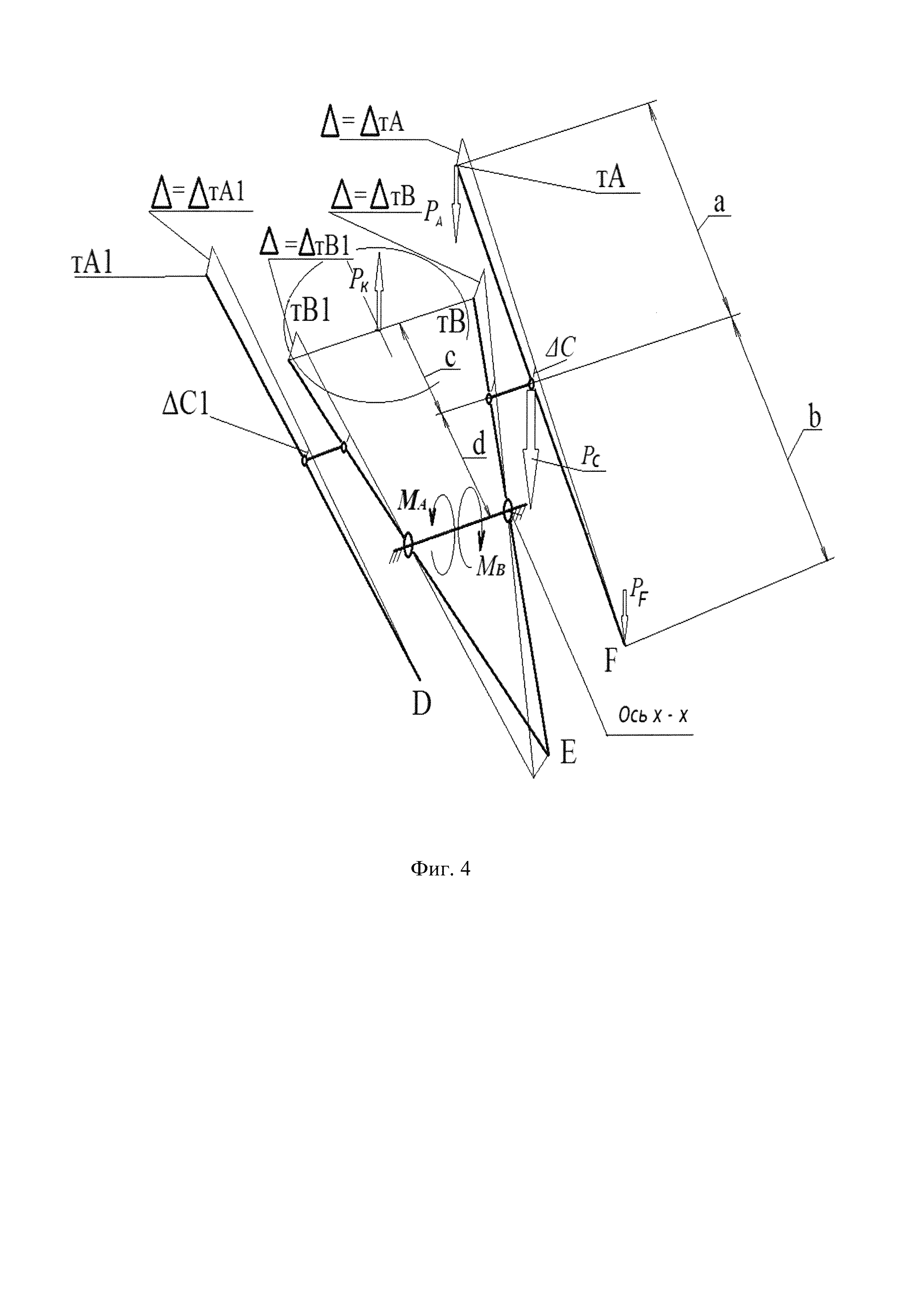
Также в автомате перекоса не возникает усилий на исполнительном механизме в канале общего шага от действия моментов в каналах поперечного и продольного управлений в следствие уравновешивания моментов на рычаге общего шага относительно оси кронтштейна рычага общего шага, при этом момент МA уравновешен моментом МB в соответствии с соотношением [8] для канала продольного управления, а момент MA1 уравновешен моментом Мв1 в соответствии с соотношением [9] для канала поперечного управления:

где
РA - сила от момента Мт в продольном управлении (см [5] и фиг. 4), равная
 где R - расстояние от центра кардана до тяги продольного управления;
где R - расстояние от центра кардана до тяги продольного управления;
Мт - момент на тарелке автомата перекоса в плоскости продольного управления;
Рк - равнодействующая от сил в подшипниках кардана от момента Мт, приложенная в центре кардана, равная по величине и противоположная по направлению силе РA;
МA - момент относительно оси х-х от силы РА, приложенной в тА;
Мв - момент относительно оси х-х от действия силы Рк, приложенной в центре кардана;
- c и d - размеры на рычаге общего шага 11, определяющие расположение оси качалки продольного управления 8.

где PA1 сила от момента Мт1 в поперечном управлении, равная
 где R1 - расстояние от центра кардана до тяги поперечного управления;
где R1 - расстояние от центра кардана до тяги поперечного управления;
Мт1 - момент на тарелке автомата перекоса в плоскости поперечного управления;
РК1 - равнодействующая от сил в подшипниках кардана от момента Мт1, приложенная в центре кардана, равная по величине и противоположная по направлению силе РА1;
MA1 - момент относительно оси х-х от силы РА1, приложенной в тА1;
Мв1 - момент относительно оси х-х от действия силы РК1, приложенной в центре кардана;
- c1 и d1 размеры на рычаге общего шага 11, определяющие расположение оси качалки поперечного управления 9
Выполнение соотношения [1] обеспечивает отсутствие перекрестной связи в канале продольного управления, выполнение соотношения [2] обеспечивает отсутствие перекрестной связи в канале поперечного управления. Это позволяет снизить нагрузку на пилота в связи с упрощением техники пилотирование вертолетом и повысить безопасность полетов.
Выполнение соотношений [8] и [9] обеспечивает отсутствие динамической перекрестной связи, что в снижает действующие нагрузки на исполнительный механизм управления общим шагом, тем самым увеличивая безопасность и снижая вес конструкции.
Конструкция автомата перекоса представлена на изображениях:
фиг. 1 - Вид снизу и сбоку;
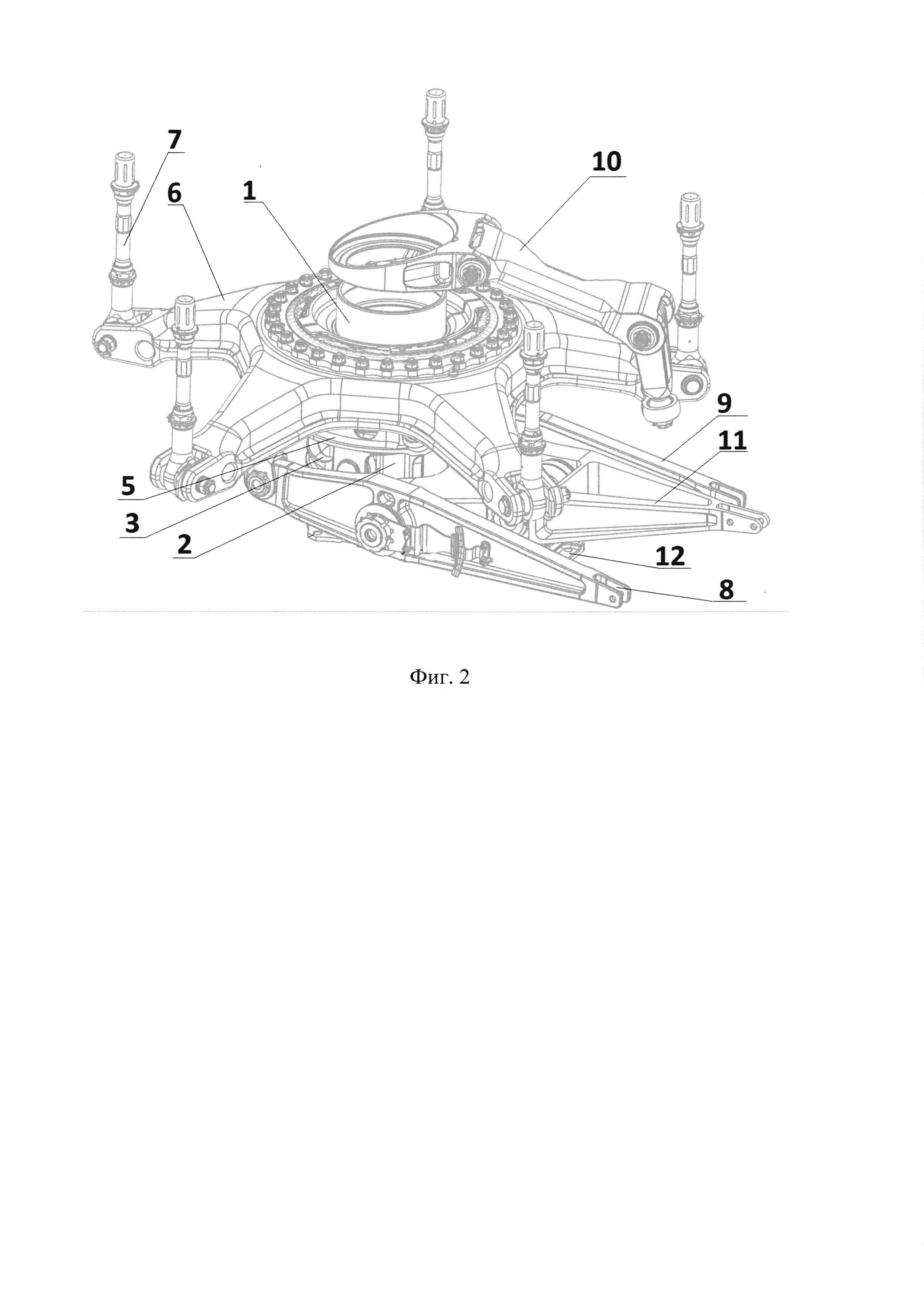
фиг. 2 - Вид слева, сверху, со стороны продольного управления
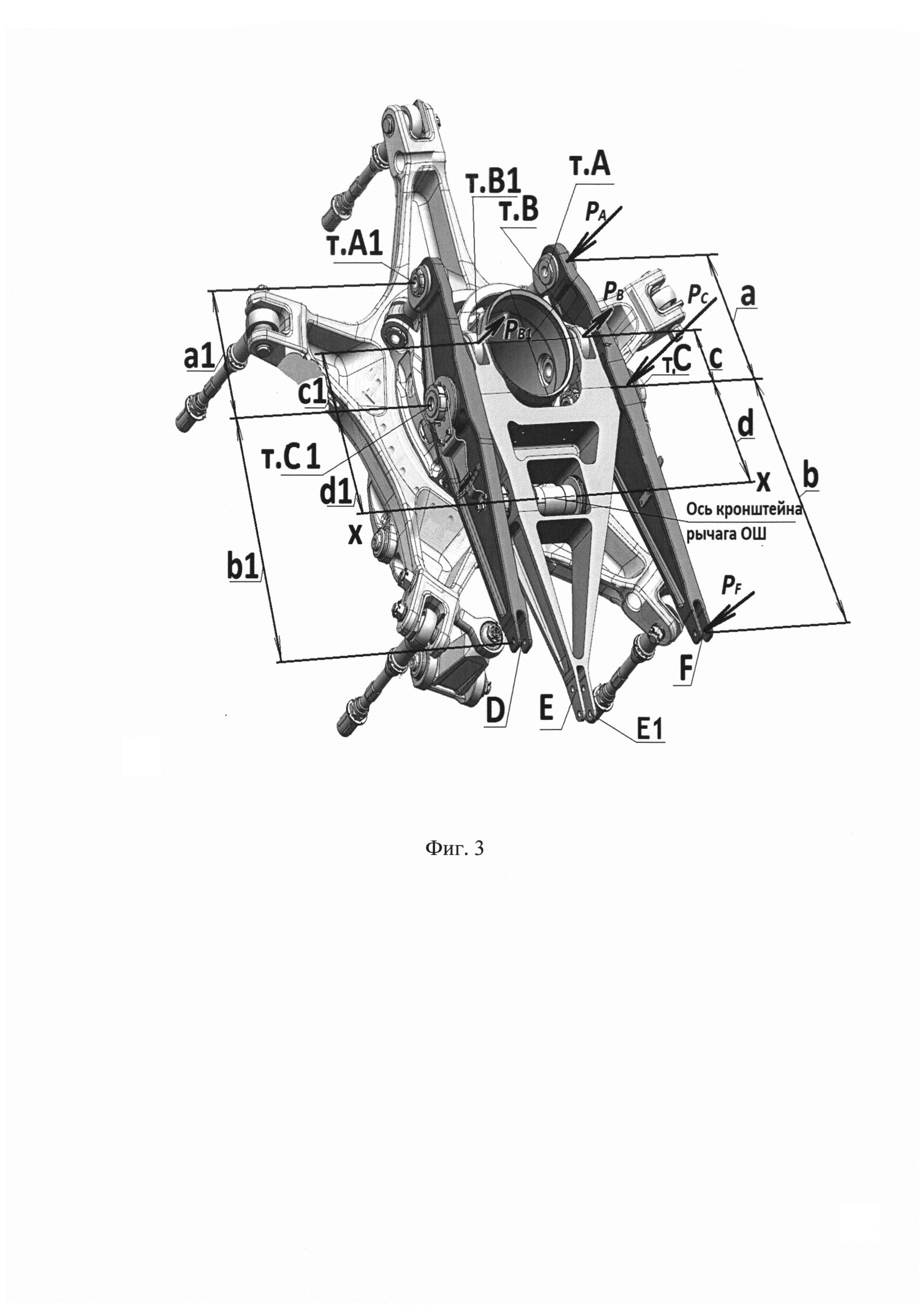
фиг. 3 - Вид снизу и сбоку со стороны поперечного управления (направляющая ползуна и кронштейн условно не показаны);
фиг. 4 - Схема автомата перекоса, иллюстрирующая отсутствие перекрестных кинематических и динамических связей,
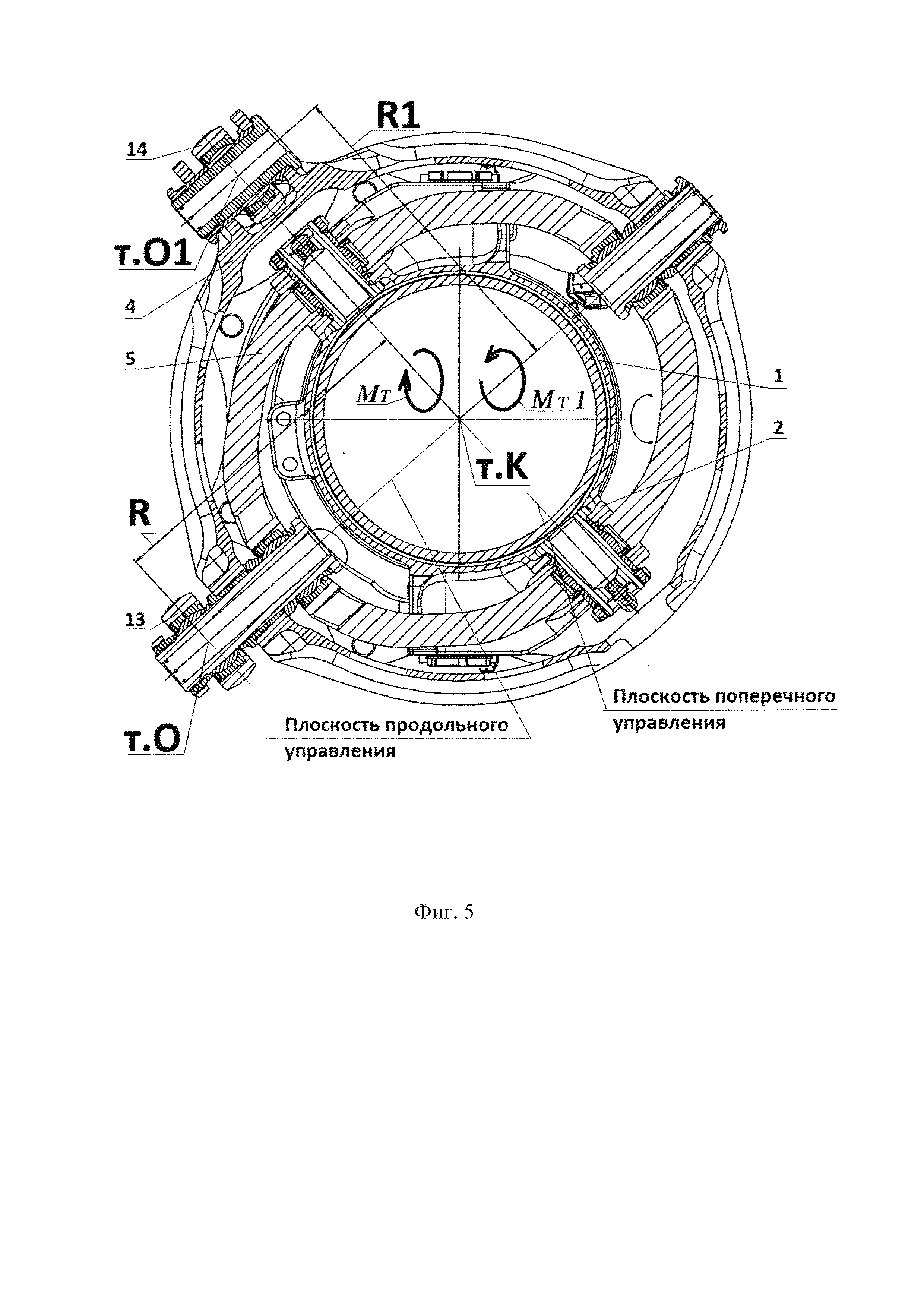
фиг. 5 - Сечение в плоскости колец кардана;
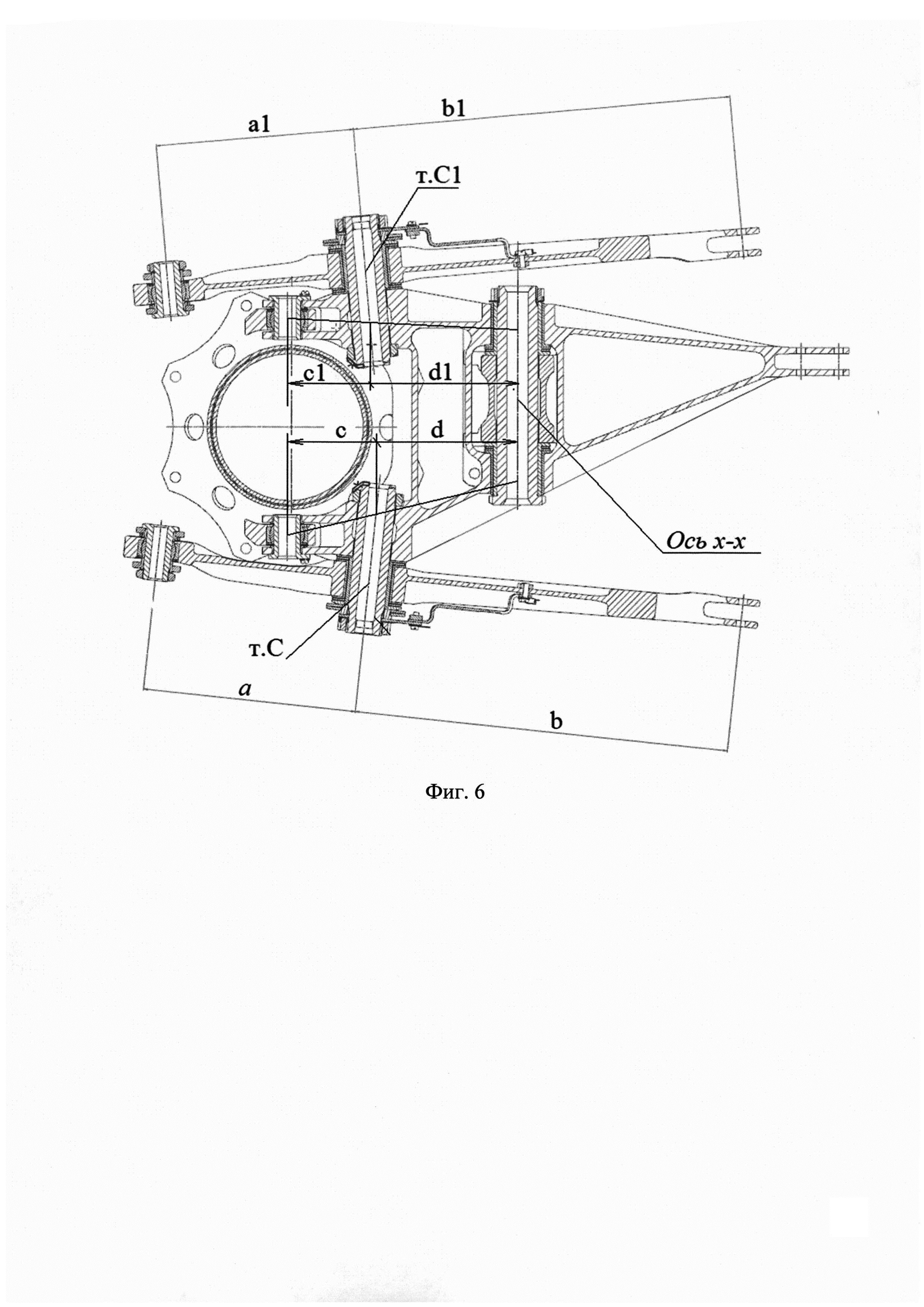
фиг. 6 - Вариант схемы автомата перекоса с непараллельными осями закрепления качалок продольного и поперечного управлений.
Автомат перекоса вертолета (фиг. 1, 2) состоит из направляющей ползуна 1, ползуна 2, серьги 3, внутреннего 4 и наружного 5 колец кардана, тарелки 6 с тягами поворота лопастей 7, качалок продольного 8 и поперечного 9 управления, поводка 10, рычага общего шага 11, кронштейна рычага общего шага 12, тяг продольного 13 и поперечного 14 управлений.
Автомат перекоса закрепляется на корпусе редуктора посредством болтовых соединений по фланцам направляющей ползуна 1 и кронштейна рычага общего шага 12. К качалкам продольного 8 (точка F фиг. 3) и поперечного 9 (точка D фиг. 3) управлений и к рычагу общего шага (точка Е фиг. 3) крепятся исполнительные механизмы. Также к рычагу общего шага (точка Е1 фиг. 3) может крепится привод управления стабилизатором. Тяги поворота лопастей 7 посредством шарниров с одой стороны крепятся к рычагам поворота лопастей, а с другой посредством шарниров закрепляются на вращающейся тарелке автомата перекоса 6. Тарелка автомата перекоса 6 посредством подшипника (подшипников) закрепляется на наружном кольце кардан 5. Тарелка автомата перекоса 6 приводится во вращение через поводок (шлиц-шарнир) 10, который крепится к тарелке автомата перекоса 6 посредством сферического подшипника. Поводок 10 своим кронштейном жестко фиксируется относительно вала главного редуктора и втулки несущего винта посредством штифта, тем самым обеспечивается синхронное вращение тарелки автомата перекоса 6 и втулки несущего винта. Кольцо кардана наружное 5 посредством подшипников крепится к кольцу кардана внутреннему 4 (см фиг. 5), которое в свою очередь посредством подшипников крепится к ползуну 2. Ползун 2 посредством серьги 3 шарнирно крепится к рычагу общего шага 12, который в свою очередь через подшипники крепится к кронштейну рычага общего шага 12. На рычаге общего шага 12 шарнирно закрепляются качалки продольного 8 и поперечного 9 управлений. К качалке продольного управления 8 крепится тяга продольного управления 13, к качалке поперечного управления 9 крепится тяга поперечного управления 14. Тяги продольного и поперечного управлений 13, 14 также крепятся посредством шарниров к кольцу кардана наружному. Описанная конструкция обеспечивает передачу управляющих воздействий от невращающихся исполнительных механизмов к вращающимися с частотой вращения вала главного редуктора рычагам поворота лопастей.
Устройство работает следующим образом.
Автомат перекоса вертолета предназначен для изменения величины и направления равнодействующих аэродинамических сил и моментов, возникающих на несущем винте вертолета с целью обеспечения управления вертолетом.
Одновременное изменение углов установки лопастей несущего винта приводит к изменению величины равнодействующей аэродинамических сил, приходящих на втулку несущего винта, от закрепленных на ней лопастей, так называемое управление по общему шагу. Циклическое изменение углов установки лопастей несущего винта приводит к изменению направления равнодействующих аэродинамических сил и моментов на втулке несущего винта, приходящих от лопастей, так называемое управление циклическим шагом в плоскостях продольного и поперечного управлений.
Дополнительно автомат перекоса может приводить в движение стабилизатор, управление которым осуществляется путем соединения рычага общего шага посредством тяг (тросов или комбинацией тяг и тросов) с качалкой на стабилизаторе. Возможным местом такого соединения к автомату перекоса могут служить отверстия Е1 на рычаге общего шага 11 (фиг. 3).
Автомат перекоса устанавливается на главном редукторе несущего винта, присоединяется к невращающимся относительно оси главного редуктора исполнительным механизмам и к вращающимся относительно оси главного редуктора рычагам поворота лопастей и передает, с одной стороны, управляющие перемещения от исполнительных механизмов (гидроусилителей, электроприводов и т.д.) системы управления на рычаги поворота лопастей несущего винта, являясь соединительным механизмом между невращающимися и вращающимися частями системы управления, а с другой, воспринимает и передает усилия с рычагов поворота лопастей, возникающих от шарнирных моментов на лопастях, на исполнительные механизмы и на корпус главного редуктора.
Управление по общему шагу обеспечивается поворотом рычага общего шага 11 относительно шарнира кронштейна 12, приводящее к вертикальному перемещению серьги 3 и закрепленного на ней с помощью двух подшипников ползуна 2. Ползун 2, перемещаясь относительно направляющей ползуна 1, приводит к вертикальному перемещению закрепленного на ползуне с помощью двух подшипников внутреннего кольца кардана 4, что в свою очередь приводит к перемещению закрепленного на внутреннем кольце кардана с помощью двух подшипников наружного кольца кардана 5 (см Фиг 5). Тарелка автомата перекоса 6, установленная через подшипник (подшипники) на кольце кардана наружном 5, передает вертикальные перемещения на тяги поворота лопастей 7, что приводит к одновременному (общему) изменению углов установки лопастей.
Управление циклическим шагом обеспечивается поворотом одной из качалок продольного 8 или поперечного 9 управлений, приводящее к вертикальному перемещению соответствующих тяг продольного 13 или поперечного 14 управлений, что в свою очередь приводит к наклону относительно ползуна 2 колец кардана 4 и 5 путем поворота в подшипниках относительно осей кардана (оси ОК и O1К на Фиг 5) и тарелки с тягами поворота лопастей, закрепленной через подшипник (подшипники) на наружном кольце кардана. Наклон кольца кардана наружного в плоскости продольного или поперечного управления (см Фиг 5) приводит к наклону тарелки автомата перекоса 6 в соответствующей плоскости. Наклон тарелки 6 приводит к тому, что при вращении лопастей, связанных с тягами поворота лопастей 7 происходит циклическое изменение углов установки лопастей за каждый оборот вращения несущего винта.
Заявляемая конструкция отличается специально выбираемым соотношением плеч качалок продольного 8 и поперечного 9 управлений, причем соответствующие соотношения плеч на качалках продольного 8 и поперечного 9 управлений равно соответствующим соотношениям расстояний, определяющим расположение осей указанных качалок на рычаге общего шага 11, а также конструктивными решениями узлов и деталей, эксплуатационными и эргономическими свойствами.
Указанный выше выбор соотношений [1] и [2] плеч качалок продольного 8 и поперечного 9 управлений (Фиг. 3, 4), обеспечивает отсутствие кинематических и динамических перекрестных связей между каналом управления общим и циклическим шагом, а также обеспечивает существенное снижением величин сил трения, возникающих по поверхностям контакта между ползуном 2 и направляющей ползуна 1. Снижение силы трения достигается за счет закрепления качалок продольного 8 и поперечного 9 управлений на рычаге общего шага 11, а не на кронштейне ползуна, как например, для схемы автомата перекоса с паралеллограммным механизмом снижения величины перекрестной связи (смотри, например, стр 218 «Вертолет Ми -8МТВ» издательства «Транспорт» 1995 г.). Эффект снижения величины силы трения (величина силы трения снижается более чем в 2 раза) достигается за счет уменьшения величин сил, приходящих на направляющую ползуна от моментов на тарелке автомата перекоса, в рассматриваемой схеме, по сравнению со схемой автомата перекоса с паралеллограммным механизмом снижения величины перекрестной связи. Уменьшение величин сил, приходящих на направляющую ползуна от момента на тарелке автомата перекоса, объясняется тем обстоятельством, что часть этого момента напрямую замыкается через рычаг общего шага 11 и кронштей рычага общего шага 12 на корпус главного редуктора.
Для исключения кинематической и динамической перекрестных связей между перемещением по общему шагу и циклическим управлением в заявленном решении автомата перекоса применен выбор соотношения плеч качалок «a»,«b», «a1», «b1» продольного 8 и поперечного 9 управлений (Фиг. 3, 4), связанных с соответствующими размерами расположения осей закрепления указанных качалок на рычаге общего шага «c»,«d», «c1», «d1» исходя из следующих условий:

, где а и b - плечи качалки продольного управления 8 (фиг. 3, 4);
с и d - размеры на рычаге общего шага 11, определяющие расположение оси качалки продольного управления 8;
a1 и b1 - плечи качалки поперечного управления 9;
c1 и d1 размеры на рычаге общего шага 11, определяющие расположение оси качалки поперечного управления 9.
Как уже отмечалось выше, выполнение соотношения [1] обеспечивает отсутствие перекрестной связи в канале продольного управления, выполнение соотношения [2] обеспечивает отсутствие перекрестной связи в канале поперечного управления.
Действительно, при неподвижных точках крепления исполнительных механизмов управления (т.D и т.F фиг. 3) и перемещении исполнительного механизма, связанного с рычагом общего шага в т.Е, ползун в т.В и т.В1 переместиться на некоторое расстояние Δ=ΔтВ=ΔтВ1 (фиг. 4). Качалка продольного управления 8 по оси закрепления в т.С перемещается на ΔС. С учетом соотношения [1] формулируем соотношение [3]:

, где ΔС - перемещение оси качалки продольного управления 8 (фиг. 3, 4),
Δ - перемещение т.В и В1 рычага общего шага (фиг. 3, 4).
Соответственно перемещение в т.А качалки продольного управления 8 (при закрепленной т.F) составит:

, где ΔА - перемещение т.А качалки продольного управления 8 (фиг. 3, 4).
С учетом соотношения [4] перемещения в т.А равны перемещениям в т.В. Аналогичные рассуждения приводят к тому, что перемещения в т.А1 равны перемещениям в т.В1.
Таким образом, при выполнении соотношений [1] и [2] любое перемещения рычага общего шага, приводящее к перемещению т.В и т.В1, приводит к точно таким же перемещениям в т.А и т.А1 на качалках продольного 8 и поперечного 9 управлений, т.е. выполняется соотношение [4а]:

Учитывая, что качалки продольного 8 и поперечного 9 управлений связаны (Фиг. 1, 2) через тяги 13, 14 с кольцом кардана наружного 5, а рычаг общего шага 11 посредством серьги 3, ползуна 2 и кольца кардана внутреннего 4 также связан с кольцом кардана наружного 5, то выполнение равенства [1] приводит к равенству [4а], выполнение которого обеспечивает плоскопараллельное перемещения кольца кардана наружного 5 и тарелки автомата перекоса 6. Тем самым обеспечивается отсутствие влияния перемещения по общему шагу на циклическое управление в каналах продольного и поперечного управлений, т.е. обеспечивается отсутствие кинематической перекрестной связи в каналах управлений.
Отсутствие кинематической перекрестной связи в каналах управления обеспечивает нормальное функционирование системы управления вертолетом, существенно снижает нагрузку на пилота, упрощает технику пилотирования вертолетом, снижая потребное количество движений органами управления вертолетом, выполняемых пилотом, на всех режимах полета и повышает безопасность полетов.
Отсутствие динамической перекрестной связи заключается в исключении влияния усилий в одном из каналов управления на усилия, возникающие в другом канале управления. В данной конструкции условием отсутствия динамической перекрестной связи является отсутствие влияния усилий в циклическом управлении (в каналах продольного и поперечного управлений) на усилия, приходящие на исполнительный механизм в канале управления общим шагом, и обеспечивается также выполнением соотношения [1] и [2]. Отсутствие перекрестной динамической связи существенно, более чем в 2 раза, снижает нагрузки, действующие на исполнительный механизм в канале общего шага, что приводит к снижению веса конструкции, повышению надежности.
При выполнении полета на вращающейся тарелке 6 возникает момент Мт от усилий на тягах поворота лопастей (данные усилия возникают от шарнирых моментов на лопастях), который в свою очередь, передается через подшипник (подшипники) тарелки автомата перекоса на невращающеюся конструкцию автомата перекоса. В общем случае момент на тарелке 6 автомата перекоса приводит к возникновению усилий как в продольном, так и в поперечном управлениях. Учитывая, что эти моменты действуют во взаимно перпендикулярных плоскостях, то действие этим моментов можно рассматривать независимо друг от друга. Рассмотрим действие момента Мт, например, в канале продольного управления, действующий в плоскости продольного управления (см Фиг 5). Момент Мт на тарелке 6 автомата перекоса через подшипник (подшипники) воздействует на кольцо кардана наружное 5. Действие указанного момента Мт в конструкции автомата перекоса приводит к возникновению пары сил РА и РК. (см. Фиг. 4). Указанные силы, равны по величине и противоположны друг к другу по направлению. Одна из сил (РА), приложена к тяге продольного управления 13 (Фиг. 5) в т.О. Вторая сила (РК) является равнодействующей (от сил на подшипниках кардана), приложенной в центре кардана в т.К на расстоянии R от т.О (см Фиг 4, 5). Таким образом:

, где РА - сила приложена в тяге продольного управления 13 (Фиг. 4, 5),
РК - равнодействующая от сил в подшипниках кардана, приложенная в центре кардана (Фиг. 4, 5),
R - расстояние от центра кардана (т.К на Фиг 5) до тяги продольного управления (т.О на Фиг 5).
Мт - момент на тарелке автомата перекоса (6) (см Фиг. 5).
Рассмотрим действие этих сил на рычаг общего шага.
Допустим, что направление момента на тарелке Мт (фиг. 5) такое, что тяга продольного управления 13 растянута, т.е. сила РА направлена вертикально вверх по отношению к плоскости кардана, соответственно в центре кардана сила РК направлена вертикально вниз.
Сила РК, действуя последовательно через подшипники крепления кольца кардана внутреннего 4, затем через ползун 2 и серьгу 3, вызовет в подшипниках крепления серьги 3 к рычагу общего шага (в т.В и т.В1 на фиг 3) две равные силы РВ и РВ1 определяемые соотношением [5а]:

- РВ и РВ1 - силы в точках т.В и т.В1 (см Фиг 3) рычага общего шага 11 в месте крепления серьги 3;
Силы РВ и РВ1 приведут к возникновению момента Мв на рычаге общего шага 11 относительно оси качания рычага общего шага (ось х-х совпадает с осью кронштейна рычага ОШ на Фиг 3). При этом значение момента Мв определяется с учетом [5а] соотношением [6]:

, где
- c и d - размеры на рычаге общего шага 11, определяющие расположение оси качалки продольного управления 8
- c1 и d1 размеры на рычаге общего шага 11, определяющие расположение оси качалки поперечного управления 9;
- Мв - момент на рычаге общего шага 11 относительно оси х-х от действия силы РК (см фиг. 4);
В соотношении [6] учтено, что т.В и т.В1 расположены на одной оси, параллельной оси х-х и, следовательно, c+d=c1+d1.
От силы РА, приложенной к качалке продольного управления в т.А, при закрепленной точке F (точка крепления исполнительного механизма к качалке продольного управления на Фиг 3, 4) на рычаге общего шага относительно оси х-х (см Фиг 3, 4) возникнет момент МА, который определяется соотношением [7]:

, где МА - момент относительно оси х-х от силы РА, приложенной в тА;
- а и b - плечи качалки продольного управления 8;
- c и d - размеры на рычаге общего шага 11, определяющие расположение оси качалки продольного управления 8;
- PF - сила в точке F (см Фиг 4), в точке крепления исполнительного механизма к качалке продольного управления 8;
- РС - суммарная (от сил РА и РF) сила в точке С (см Фиг 4) крепления оси качалки продольного управления 8 к рычагу общего шага 11.
Учитывая соотношения [5], [6], [7], получаем, что моменты МA и МB равны и противоположно направлены, то есть их сумма относительно оси х-х (оси кронштейна рычага общего шага см. Фиг 3) будет равняться нулю [8]:

где РA - сила от момента Мт в продольном управлении (см [5] и фиг. 4);
Рк - равнодействующая от сил в подшипниках кардана от момента Мт, приложенная в центре кардана (см [5] и Фиг. 4, 5);
МA - момент относительно оси х-х от силы РA, приложенной в тА;
Мв - момент относительно оси х-х от действия силы Рк, приложенной в центре кардана;
- c и d - размеры на рычаге общего шага 11, определяющие расположение оси качалки продольного управления 8.
Аналогичные рассуждения для действия момента на тарелке автомата перекоса Мт1, действующего в плоскости поперечного управления (см Фиг 5) приводят к выполнению условия соотношения [9]:

где PА1 сила от момента Мт1 в поперечном управлении, равная
 где R1 - расстояние от центра кардана до тяги поперечного управления;
где R1 - расстояние от центра кардана до тяги поперечного управления;
Мт1 - момент на тарелке автомата перекоса в плоскости поперечного управления;
РК1 - равнодействующая от сил в подшипниках кардана от момента Мт1, приложенная в центре кардана, равная по величине и противоположная по направлению силе PА1;
MА1 - момент относительно оси х-х от силы PА1, приложенной в тА1;
Мв1 - момент относительно оси х-х от действия силы РК1, приложенной в центре кардана;
- c1 и d1 размеры на рычаге общего шага 11, определяющие расположение оси качалки поперечного управления 9 (см Фиг 3);
Примечание: Моменты MА1, Мв1 и силы PА1, PК1 не показаны на Фиг 4.
Благодаря выполнению соотношений [1] и [2] обеспечивается выполнение соотношений [8], [9], т.е. моменты Мв, Мв1 относительно оси кронштейна общего шага (оси х-х) уравновешиваются соответствующими моментами МА, МА1, что приводит к отсутствию реакции в месте крепления исполнительного механизма в канале управления общим шагом (т.Е Фиг. 3, 4). Таким образом, обеспечивается отсутствие динамической перекрестной связи в канале общего шага от действия моментов Мт, Мт1 в соответствующих плоскостях продольного и поперечного управлений (см Фиг 5) на усилие в исполнительном механизме в канале управления общим шагом.
На Фиг. 6 показан вариант схемы автомата перекоса с расположением осей качалок продольного (ось С) и поперечного (ось С1) управлений, на котором указанные оси не параллельны оси качания рычага общего шага (х-х), в отличии от варианта Фиг 3, на котором оси С и С1 параллельны оси х-х.
Для представленной схемы автомата перекоса, разработана рабочая конструкторская документация, изготовлены опытные образцы, проведены испытания.


Устройство для подачи омывающей жидкости
Стенд для усталостных испытаний
Система управления вертолетом
Устройство для изготовления лопасти
Способ и устройство для изготовления моноколец ленточных канатов
Стабилизатор вертолета
Маслобак и маслосистема двигателей летательного аппарата
Устройство для сборки лопасти несущего винта вертолета
Система гидравлическая вертолета
Стенд для износных испытаний автомата перекоса вертолета
Скоростной винтокрыл
Одновинтовой вертолет и способ управления им

