Результат интеллектуальной деятельности: Автономный необитаемый подводный аппарат
Вид РИД
Изобретение
Изобретение относится к области создания автономных необитаемых подводных аппаратов (АНПА), а точнее, их систем управления.
АНПА является полностью автоматической технической системой, предназначенной для выполнения различных задач под водой. Поскольку АНПА функционирует в сложной подводной обстановке, он оборудован широким набором технических средств. Базовый набор этих средств включает:
- источник электрической энергии (как правило, аккумуляторная батарея);
- двигательно-рулевая система;
- система погружения-всплытия;
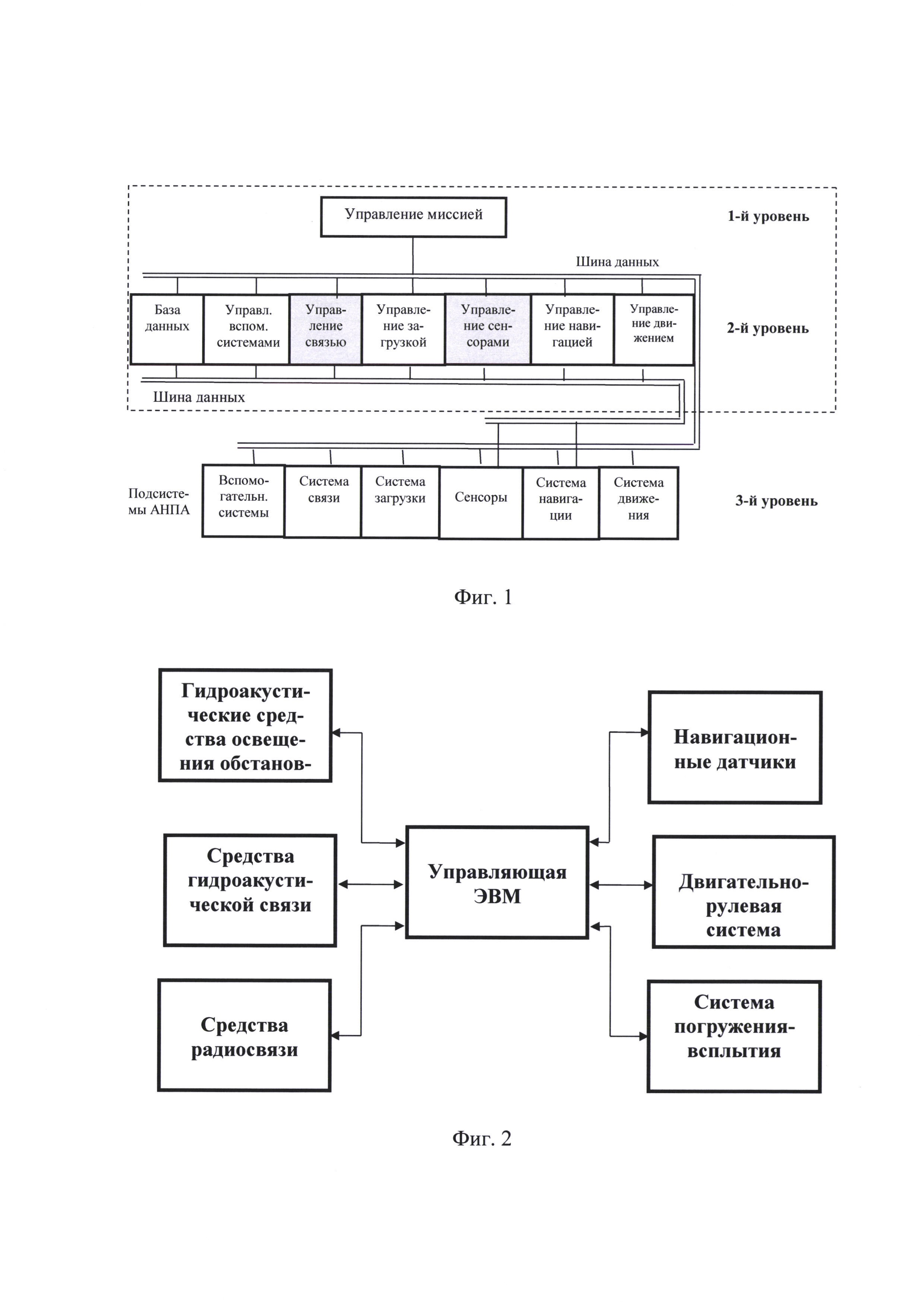
- навигационные датчики: инерциальная навигационная система (ИНС), эхолот, лаг;
- гидроакустические средства освещения обстановки (излучающие и приемные антенны, генераторы излучаемых сигналов, аппаратура обработки сигналов с выхода приемных антенн);
- средства гидроакустической связи;
- средства радиосвязи;
- управляющая ЭВМ.
В зависимости от назначения АНПА, приведенный список может быть расширен за счет дополнительных средств обеспечения движения, датчиков измерения параметров различных физических полей, различных манипуляторов.
Все перечисленные технические средства, как правило, созданы разными разработчиками, имеют в своем составе разные вычислительные средства и разные системы электропитания. Их информационное сопряжение с управляющей ЭВМ, источниками и потребителями информации осуществляется, как правило, с использованием разных протоколов обмена данными.
В [2] описана работа блока управления беспилотного летательного аппарата (БПЛА) по выбору маршрута полета. Маршрут полета БПЛА определяется динамически во время полета или заранее перед полетом, используя навигационные данные. По этим данным строится несколько вариантов маршрута, которые ранжируются по выбранным критериям.
В [3] описана операционная система, ориентированная на применение в робототехнических системах. Данная операционная система обеспечивает разработку, настройку, сборку, построение, развертывание и управление робототехникой.
Управление известными АНПА (как и БПЛА), как правило, является мультиобъектным [5-7]. Это означает, что управление функционированием всех технических средств (подсистем) АНПА возлагается на управляющую ЭВМ, в память которой закладывается формализованный план миссии. В процессе выполнения миссии управляющая ЭВМ в соответствии с планом миссии выдает команды управления соответствующим техническим средствам АНПА. Работа технических средств АНПА ограничивается выполнением команд, поступивших от управляющей ЭВМ.
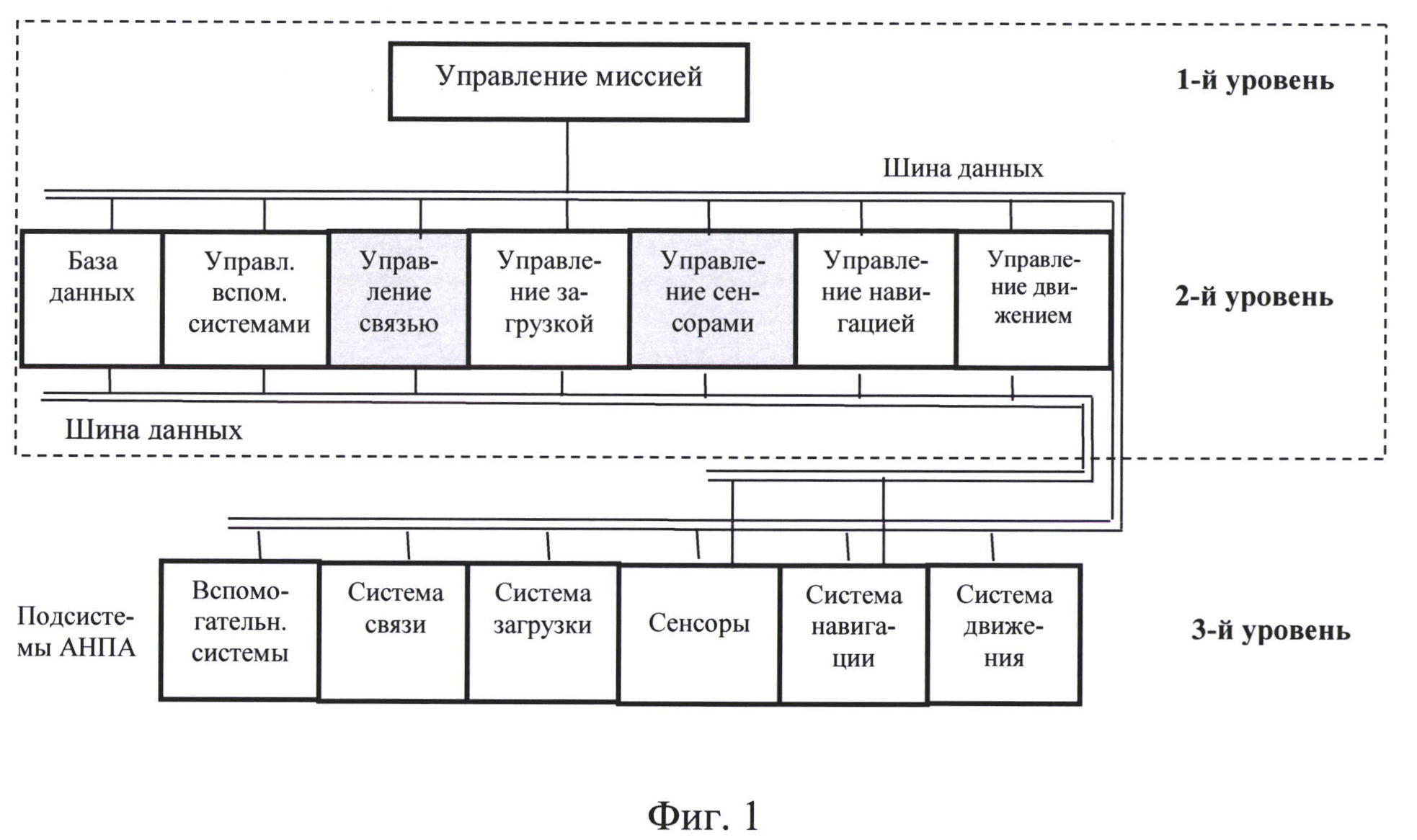
Примером мультиобъектного управления является система управления (СУ) АНПА: Autonomous mission controller, описанная в [4] и схематически изображенная на фиг. 1. Управление в этой СУ осуществляется на трех уровнях. 1-й уровень - организационный (organization and management), 2-й уровень - анализ поступивших данных и координация (supervision and coordination), 3-й уровень - исполнительный (execution and control). Первый и второй уровни, на которых вырабатываются планы управления, реализуются в СУ АНПА. Третий уровень реализуется в подсистемах АНПА. План миссии и необходимые для управления базы данных загружаются на берегу в СУ. План миссии разбит на этапы, которые, в свою очередь состоят из сегментов. Описание каждого сегмента включает: его назначение, перечень подсистем АНПА, задействованных в выполнении данного сегмента и другие данные. При выполнении текущего сегмента плана миссии СУ АНПА выдает в соответствующие подсистемы АНПА управляющие команды и получает от них сообщения о результатах выполнения команд. С учетом этих сообщений блок управления принимает решение о возможности перехода к выполнению следующего сегмента плана. Следует особо заметить, что все подсистемы АНПА реализованы на собственных аппаратно-программных средствах и структурно не входят в СУ (на фиг. 1 СУ - это прямоугольник, ограниченный пунктирной линией). Связь подсистем АНПА с СУ осуществляется при помощи шины обмена данными. Роль подсистем АНПА в процессе управления ограничена исполнением команд, поступивших от СУ.
Практика использования АНПА показывает, что для успешного выполнения миссии СУ АНПА должна не только выдавать команды в соответствии с формализованным планом миссии, но и парировать все непредвиденные нештатные ситуации, обусловленные как внешними, так и внутренними причинами. К внешним причинам нештатных ситуаций относятся: преднамеренное и непреднамеренное противодействие со стороны других объектов, неподвижные и мобильные препятствия, непредвиденное изменение течения, температуры воды, гидроакустических условий и др. Внутренними причинами являются: возникшие неисправности аппаратуры, сбои программного обеспечения, неспособность отдельных устройств выполнить выданную ему команду в силу ограниченных функциональных возможностей, либо исчерпания заряда источника питания. Все перечисленные причины, как правило, ведут к отклонению АНПА от точного выполнения формализованного задания на миссию. Это проявляется в отклонении от маршрута, запаздывании, либо невозможности выполнения отдельных этапов миссии. В результате СУ АНПА должна принимать весьма нетривиальные решения, обеспечивающие выполнение плана миссии в непредсказуемых условиях.
Практика создания и использования АНПА показала, что разработать такую сложную централизованную систему управления практически невозможно. Ввиду этого, большинство созданных в мире АНПА имеют весьма ограниченные функциональные возможности.
В качестве прототипа выберем АНПА, описанный в работе [1]. Схема управления АНПА-прототипа приведена на фиг. 2. СУ АНПА, реализованная на программном уровне, в соответствии с планом миссии, хранящимся в ее памяти, в указанные в плане моменты времени выдает указанные в плане команды управления указанным техническим средствам. Техническое средство, получившее команду, выполняет ее и результаты выполнения сообщает управляющей ЭВМ.
Чтобы мультиобъектная СУ АНПА была эффективной, при выдаче команд в подсистемы АНПА она должна учитывать их техническое состояние, энергетические и временные ресурсы, а также уметь оптимизировать их функционирование в сложившейся обстановке. Создать такую СУ, как показала практика, не представляется возможным ввиду ее высокой сложности.
Решаемая техническая проблема - повышение эффективности выполнения миссий АНПА.
Технический результат - повышение эффективности управления АНПА при сокращении стоимости разработки алгоритмов управления и реализующего их программного обеспечения.
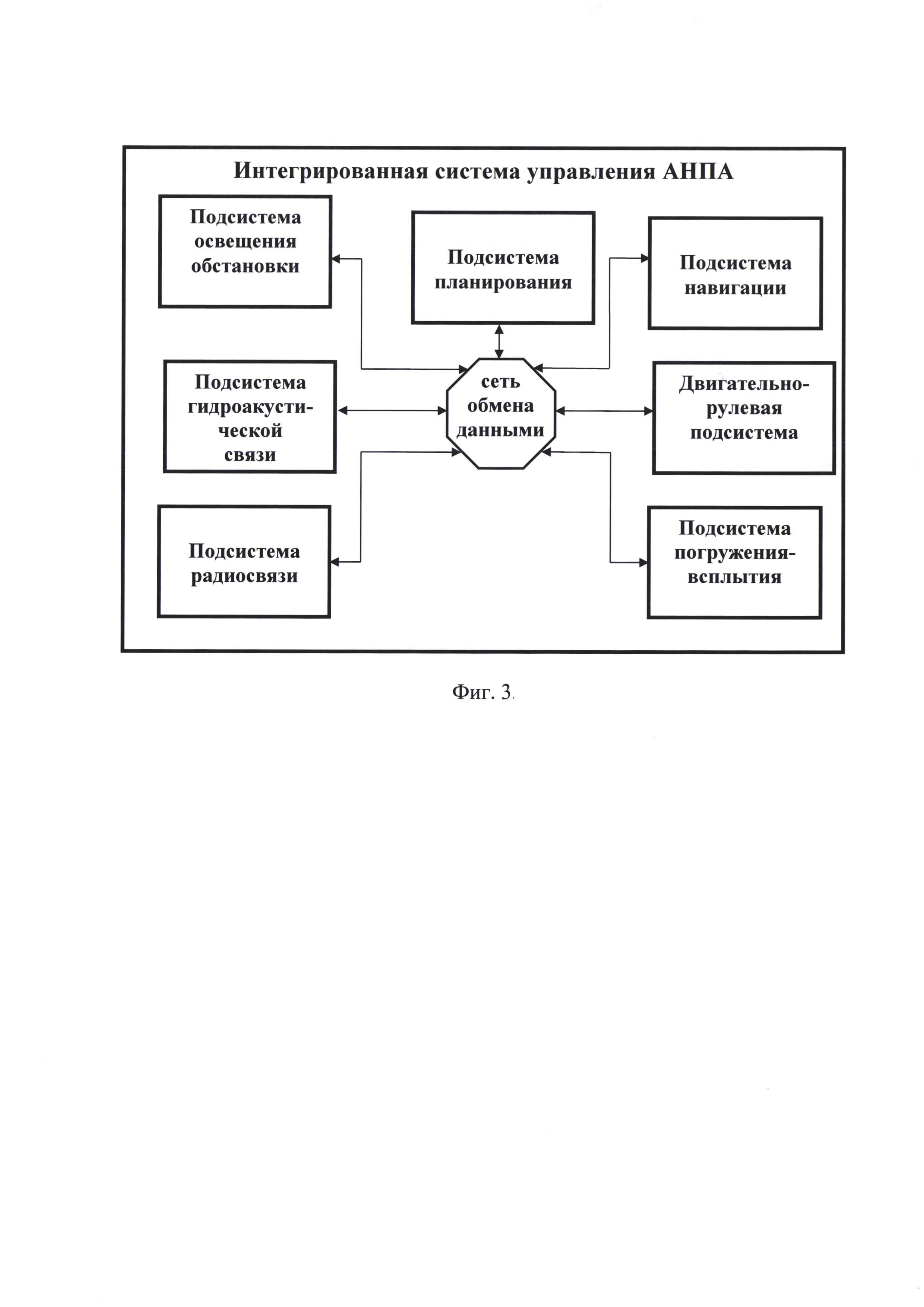
Указанный технический результат достигается путем перехода от централизованного (мультиобъектного) управления АНПА к децентрализованному (мультиагентному). Это означает, что создается интегрированная система управления (ИСУ), в которую в виде подсистем включаются все перечисленные выше технические средства, приобретающие статус агентов, т.е. самостоятельных подсистем со своими средствами управления. СУ АНПА, которая имела место в мультиобъектной версии, в мультиагентной версии заменяется подсистемой планирования, в функции которой входит организация выполнения плана миссии путем выдачи подсистемам ИСУ планов работы на предстоящем этапе миссии, соответствующих формализованному плану миссии АНПА, а также корректура этих планов в случае возникновения непредвиденных ситуаций, препятствующих точному выполнению плана миссии АНПА.
Подсистемы ИСУ, получив план работы на предстоящем этапе миссии, оптимизируют его выполнение с учетом сложившейся ситуации и имеющихся технических возможностей. При необходимости для реализации плана привлекаются другие подсистемы. Конкретное содержание этого привлечения с учетом имеющихся технических возможностей определяется путем обмена данными между этими подсистемами. Для обеспечения обмена данными между подсистемами ИСУ она оснащена сетью обмена данными, позволяющей осуществлять обмен данными с использованием унифицированных сетевых протоколов.
Заметим, что каждая из подсистем при необходимости может, в свою очередь, состоять из нескольких агентов со своими средствами управления, что позволяет осуществить декомпозицию алгоритма управления подсистемы и тем самым упростить его.
Структура ИСУ АНПА приведена на фиг. 3. ИСУ АНПА включает подсистемы:
- планирования;
- навигации;
- освещения обстановки;
- гидроакустической связи;
- радиосвязи;
- двигательно-рулевая;
- погружения-всплытия.
При этом для сокращения габаритов и энергопотребления ИСУ АНПА:
- подсистема планирования и средства управления всех подсистем реализуются на программном уровне единого вычислительного устройства, предпочтительно с распределенной архитектурой (для повышения надежности и упрощения разработки программного обеспечения);
- электропитание всех технических средств ИСУ осуществляется посредством единой системы электропитания, соединенной с источником электроэнергии АНПА.
Функционирование ИСУ АНПА организовано следующим образом. На берегу в память единого вычислительного устройства ИСУ записывается план миссии, разбитый на этапы с планом на каждый этап. В процессе движения АНПА подсистема планирования выдает средствам управления подсистем ИСУ планы на предстоящий этап. Средства управления подсистемы ИСУ, получив план на предстоящий этап, разрабатывает варианты его выполнения с учетом имеющихся ресурсов, из которых выбирает оптимальный план, соответствующий некоторому критерию качества (например, минимуму времени исполнения, минимуму расхода электроэнергии и т.д.), и организует его выполнение. При необходимости средство управления подсистемой привлекает к выполнению задания другие подсистемы ИСУ, оптимизируя при этом совместную работу подсистем, для чего обменивается с ними по сети необходимыми данными. Подсистема, получившая план этапа от подсистемы планирования, сообщает подсистеме планирования результаты его выполнения.
Если результаты выполнения по срокам и полноте укладываются в план на текущий этап миссии, подсистема планирования переходит к выдаче планов на следующий этап в соответствии с планом миссии. В противном случае подсистема планирования корректирует сроки и/или содержание очередного этапа. И так до завершения миссии.
Рассмотрим управление АНПА при обеспечении его движения по заданному маршруту. Заданный маршрут движения АНПА хранится в памяти подсистемы планирования. Для контроля движения АНПА по заданному маршруту в подсистему планирования от подсистемы навигации поступает информация о текущих счислимых координатах АНПА, а также текущая предполагаемая круговая ошибка счисления координат. По этим данным подсистема планирования оценивает отклонение положения АНПА от заданного маршрута и, если отклонение превышает допустимую величину, принимает решение о выполнении обсервации. Запрос на проведение обсервации подсистема планирования (ПП) выдает в подсистему навигации, средство управления которой решает, каким методом проводить обсервацию. При выборе метода обсервации, средство управления подсистемы навигации запрашивает техническое состояние подсистемы радиосвязи, ответственной за проведение обсервации по сигналам глобальной спутниковой навигационной системы (ГСНС) и сигналам радионавигационных систем (РНС), а также подсистемы гидроакустической связи, ответственной за проведение обсервации по сигналу донных маяков-ответчиков. Также подсистема навигации запрашивает у двигательно-рулевой подсистемы наличие ресурсов для всплытия АНПА для проведения обсервации по сигналам ГСНС и РНС. В результате выбор метода обсервации осуществляется с учетом полученных ответов, а также данных по оборудованию района плавания средствами РНС и донных маяков-ответчиков. Если выбран метод обсервации, связанный со всплытием АНПА, подсистема навигации сообщает об этом подсистеме планирования, которая с учетом наличия запаса электроэнергии выдает заявку на всплытие движительно-рулевой подсистеме. Когда всплытие осуществлено, подсистема планирования сообщает об этом навигационной подсистеме, которая выдает заявку подсистеме радиосвязи на проведение обсервации. Полученные результаты обсервации навигационная подсистема сообщает подсистеме планирования и использует для коррекции счисления.
Таким образом, главным отличием мультиагентного построения ИСУ АНПА от мультиобъектного является наличие средств управления в каждой подсистеме АНПА, что делает их поведение интеллектуальным.
Преимуществами мультиагентного построения ИСУ АНПА по сравнению с мультиобъектным являются:
- повышение эффективности управления АНПА за счет оптимизации алгоритмов управления каждой подсистемой и АНПА в целом;
- сокращение трудоемкости (и соответственно, цены) создания алгоритмов управления АНПА и реализующего их программного обеспечения;
- сокращение трудоемкости отработки взаимодействия всех подсистем АНПА;
- возможность создания ИСУ, унифицированной для различных типов АНПА.
Последнее достоинство особенно важно, учитывая, что разработка алгоритмов управления техническими средствами является наиболее трудоемкой частью создания АНПА любого назначения.
Для подтверждения эффективности заявляемого изобретения было проведено моделирование функционирования АНПА с описанным выше типовым набором технических средств при выполнении миссии перехода АНПА в точку с заданными координатами. При этом в процессе перехода случайным образом моделировались нештатные ситуации, обусловленные как внешними причинами (неподвижные и подвижные препятствия, ограниченные возможности коррекции текущих координат АНПА), так и внутренними факторами (неисправности аппаратуры). Моделирование проводилось как для мультиобъектного варианта управления АНПА, так и для мультиагентного.
В результате проведения 1000 циклов моделирования было получено, что вероятность выполнения миссии в случае мультиагентного варианта управления АНПА составила 0,93, в то время, как в случае мультиобъектного варианта управления - 0,76. Как показал проведенный анализ, полученные результаты обусловлены тем, что при мультиобъектном управлении СУ АНПА не во всех случаях способна правильно оценить имеющиеся ресурсы и возможности для выполнения текущего этапа плана миссии и, как следствие, оптимизировать выполнение планов отдельными подсистемами АНПА.
Кроме того, была проведена оценка трудоемкости разработки алгоритмов управления АНПА и реализующего их программного обеспечения (ПО) для обоих вариантов управления, которая показала, что разработка алгоритмов и ПО в случае мультиагентного управления в среднем на 40% менее трудоемка, чем в случае мультиобъектного управления. Объясняется это декомпозицией алгоритмов и ПО в случае мультиагентного управления и связанной с этим возможностью привлечения к разработке декомпозированных алгоритмов специалистов различного профиля и компетенций.
Также было показано, что при объединении всех технических средств АНПА в ИСУ физический объем аппаратуры в корпусе АНПА сокращается на 12% (за счет создания единой вычислительной системы и единой системы электропитания).
Таким образом, заявленный технический результат - повышение эффективности управления АНПА при сокращении стоимости разработки алгоритмов управления АНПА и реализующего их программного обеспечения - можно считать достигнутым.
Источники информации:
1. Ваулин Ю.В., Инзарцев А.В., Львов О.Ю., Матвиенко Ю.В., Павин A.M. Реконфигурируемая система управления и навигации для многофункциональных подводных роботов // Подводные исследования и робототехника, 2017, №1 (23), с. 4-13.
2. Патент 10163357 (В2) (США). Navigation assistance data and route planning for drones.
3. Патент 9195233 (B2) (США). General purpose robotics operating system
4. Патент 6122572 (А) (США). Autonomous command and control unit for mobile platform.
5. Ржевский Г.А., Скобелев П.О. Как управлять сложными системами? Мультиагентные технологии для создания интеллектуальных систем управления предприятиями // Самара: Офорт, 2015, 290 с.
6. Городецкий В.И., Грушинский М.С., Хабалов А.В. Многоагентные системы (обзор) // Новости искусственного интеллекта, 1998, №2, с. 64-116.
7. Marino A., Antonelli G., Aguiar A. Pedro., Pascoal A., Chiaverini S. A decentralized strategy for multi-robot sampling/patrolling: theory and experiments // IEEE Transactions on Control Systems Technology. Vol. 23. №1. 2015. P.313-322.
Одномодовый плазмонный волновод
Квантовый генератор случайных чисел
Генератор плазмонных импульсов терагерцовой частоты
Устройство для изготовления интегральной оптической волноводной структуры
Устройство для сейсмической разведки
Способ подводной сейсмической разведки
Сеть квантового распределения ключей
Подводный буровой модуль для бурения нефтяных и газовых скважин
Система детектирования одиночных фотонов
Композиция для получения полупроницаемой пористой мембраны
Способ обработки информации в гидроакустической антенне
Способ оценки полного профиля вертикального распределения скорости звука
Способ получения упругого и звукопоглощающего полимерного материала с термопластичными микросферами
Бескорпусная гидроакустическая антенна
Способ обнаружения и сопровождения целей циклически работающей системой наблюдения, состоящей из нескольких разнородных приемных каналов
Способ определения координат (пеленга и дистанции) и параметров движения (курса и скорости) морской шумящей цели
Способ формирования характеристики направленности плоской, горизонтально расположенной многоэлементной излучающей антенны доплеровского лага
Способ измерения скорости судна доплеровским лагом
Способ измерения скорости судна доплеровским лагом
Способ измерения скорости судна доплеровским лагом

