Результат интеллектуальной деятельности: СПОСОБ ПОДВОДНОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ
Вид РИД
Изобретение
Изобретение относится к области геофизики и может быть использовано для поиска и уточнения строения месторождений углеводородов и других полезных ископаемых на акваториях, покрытых льдом круглогодично или большую часть года, и повышения эффективности процесса его освоения.
В связи с открытием ряда месторождений углеводородов на акваториях Арктики и высокими перспективами нефтегазоносности глубоководных частей, особенно континентального склона, а также и других полезных ископаемых, представляет интерес расширение геофизических исследований, районы которых ограничиваются ледовыми полями. Акватория Карского моря, под которой расположена северная часть Западно-Сибирского нефтегазоносного бассейна, обычно освобождается ото льда только на 2 месяца в году, но бывали годы, когда она вообще не освобождалась. В связи с этим представляется крайне важным разработка новых технологий (способов) проведения сейсмической разведки месторождений углеводородов и других полезных ископаемых в ледовых условиях, часть которых уже находится на разных стадиях разработки и применения [1, 2, 3].
В настоящее время в ледовых условиях Арктики неоднократно применялась морская сейсморазведка в покрытых льдом или имеющих препятствия водах [2], разработанная компанией ION Geophysical (США). Технология подразумевает спуск с ледокола или судна ледового класса, следующего за ледоколом, комплекса забортного геофизического оборудования через специальную конструкцию («скег»), расположенную под водой в кормовой части. Скег обеспечивает безопасный спуск и буксировку приемно-излучающих антенн (сейсмокос и групп источников упругих колебаний) ниже льда на глубину более 10 м. Теоретически способ по патенту [2] предусматривает проведение сейсморазведки с одной или несколькими сейсмокосами, что позволяет реализовать двухмерные (2D) и трехмерные (3D) наблюдения. Опыт применения технологии [2] в модификации 2D в ледовых условиях зарубежных и российских арктических акваторий показал сложность, а при сплошном паковом ледовом покрове и невозможность реализации наблюдений с длинными сейсмическими косами. В условиях паковых льдов приходилось сокращать более чем в 10 раз длину приемной антенны (от плановых 4500 м до 100-450 м). Нам не известны результаты успешной реализации 3D исследований по способу [2] в ледовых условиях. Кроме того, при разрушении льда во время движения судна (или судов) возникают сильные шумы, значительно ухудшающие соотношение между полезными сигналами и помехами.
Не вызывает сомнений, что повышению качества сейсмических данных при проведении сейсморазведки 2D и 3D в ледовых условиях будет способствовать «уход» под воду всего приемно-регистрирующего комплекса, включая несущее его судно. В качестве судна может быть использовано стандартное или специально сконструированное подводное судно (подводная лодка). Известны различные способы реализации сейсморазведки 2D и 3D с применением буксируемых сейсмокос или автономных донных сейсмокос и сейсмографов, устанавливаемых на дне.
В известном способе проведения 3D подводно-подледной сейсмоакустической разведки с использованием подводного судна ОАО ЦКБ «Лазурит» [3] предусмотрена установка с подводного судна автономных линейных донных антенн из цифровых сейсмоакустических датчиков. Возбуждение упругих колебаний осуществляется с помощью источника когерентного широкополосного акустического излучателя, установленного стационарно на подводном судне. Основными недостатками данного способа являются:
- сложность или практическая невозможность его реализации на больших (свыше 300-400 м) глубинах, обусловленные ограничениями рабочих глубин подводных судов;
- большие потери времени на установку и эвакуацию донного оборудования;
- невозможность контроля качества и обработки материалов в реальном времени.
Известно применение протяженных гидроакустических антенн, выпускаемых из кормовой части подводной лодки и буксируемых на заданной глубине с целью обнаружения других подводных лодок в океане [4]. Однако замена гидроакустической антенны на сейсмокосу с дополнением источника упругих колебаний позволит реализовать только двухмерные (2D) исследования.
Другим аналогом является способ проведения подводно-подледной геофизической разведки и технологический комплекс для его осуществления ООО «Комплексные Инновационные Технологии» [1]. В этом способе подводное судно сконструировано специальным образом, позволяющим ему двигаться лагом за счет установки на его корме и носу двух движителей с возможностью поворота вектора тяги на любой угол в диапазоне 0-360°. При этом после выхода на рабочий курс лагом приемно-излучающие антенны разворачиваются с лебедок, расположенных вдоль борта. Основными недостатками данного способа являются:
- сложность реализации подводного судна принципиально новой конструкции (вызывает сомнение возможность стабильного выдерживания судном, движущимся лагом, заданного курса отработки сейсмических профилей);
- за счет сильных гидродинамических потоков, возникающих при обтекании водой широкого корпуса (борта) судна и от двух мощных движителей, разнесенных по его краям, возникнут сильные шумы и возможны отклонения буксируемых сейсмических кос от траекторий параллельного движения, что снизит качество получаемых материалов, а возможно и приведет к аварийной ситуации с запутыванием сейсмокос. Такая ситуация нередко бывает даже у традиционных надводных судов 3D, в частности случилась на судне «Вячеслав Тихонов» ОАО «Совкомфлот». Аналогичная авария на подводном судне может завершиться катастрофой с гибелью судна вместе с экипажем.
В качестве прототипа выбрано решение, описанное в европейском патенте [7]. Данное решение предполагает установку на уже существующие или специально разработанные подводные лодки складных приемных систем по бокам и при необходимости по дну корпуса. Приемные системы представляют собой группы сейсмических датчиков, как вариант они могут представлять собой сейсмические косы. В нерабочем положении приемные системы прижимаются к бортам подводной лодки и не мешают движению.
Такое техническое решение способно обеспечить проведение эффективной и безопасной разведки, в том числе месторождений углеводородов на больших глубинах и под слоем льда с использованием существующего подводного флота. Но при этом данному решению присущ существенный недостаток - конструкция не предусматривает возможности разворота приемных систем в приемную решетку большой площади для эффективной реализации сейсморазведки. Так, при использовании описанного механизма прижатия приемных систем к бортам подводной лодки площадь итоговой приемной решетки ограничена суммарной площадью бортов. Это очень существенно снижает эффективность работы такой системы и заметно увеличивает время, необходимое для сейсморазведки 3D больших территорий.
Технической задачей изобретения является разработка способа сейсмической разведки с использованием уже существующего подводного флота с существенным повышением эффективности и скорости такой разведки.
Технический результат заключается в существенном повышении эффективности разведки за счет создания приемной решетки большой площади.
Техническая задача решается, а результат достигается тем, что в способе подводной сейсмической разведки с использованием подводного судна, вдоль бортов которого расположены складные сейсмические датчики, согласно изобретению сейсмические датчики представляют собой сейсмические косы, натянутые между парами разнесенных вдоль корпуса сворачиваемых направляющих, предварительно расположенных с обоих бортов подводного судна вдоль корпуса и разворачиваемых перпендикулярно корпусу для создания совместно с натягиваемыми сейсмическими косами пространственной сейсмической решетки.
Также результат достигается тем, что в различных вариантах предусмотрено то, что:
в способе разведки согласно изобретению на днище подводного судна размещаются дополнительные стационарные сейсмические косы;
в способе разведки согласно изобретению с бортовой лебедки развертывается за его кормой приемная сейсмическая коса, многократно превышающая по длине подводное судно.
Сущность способа поясняется чертежами, где:
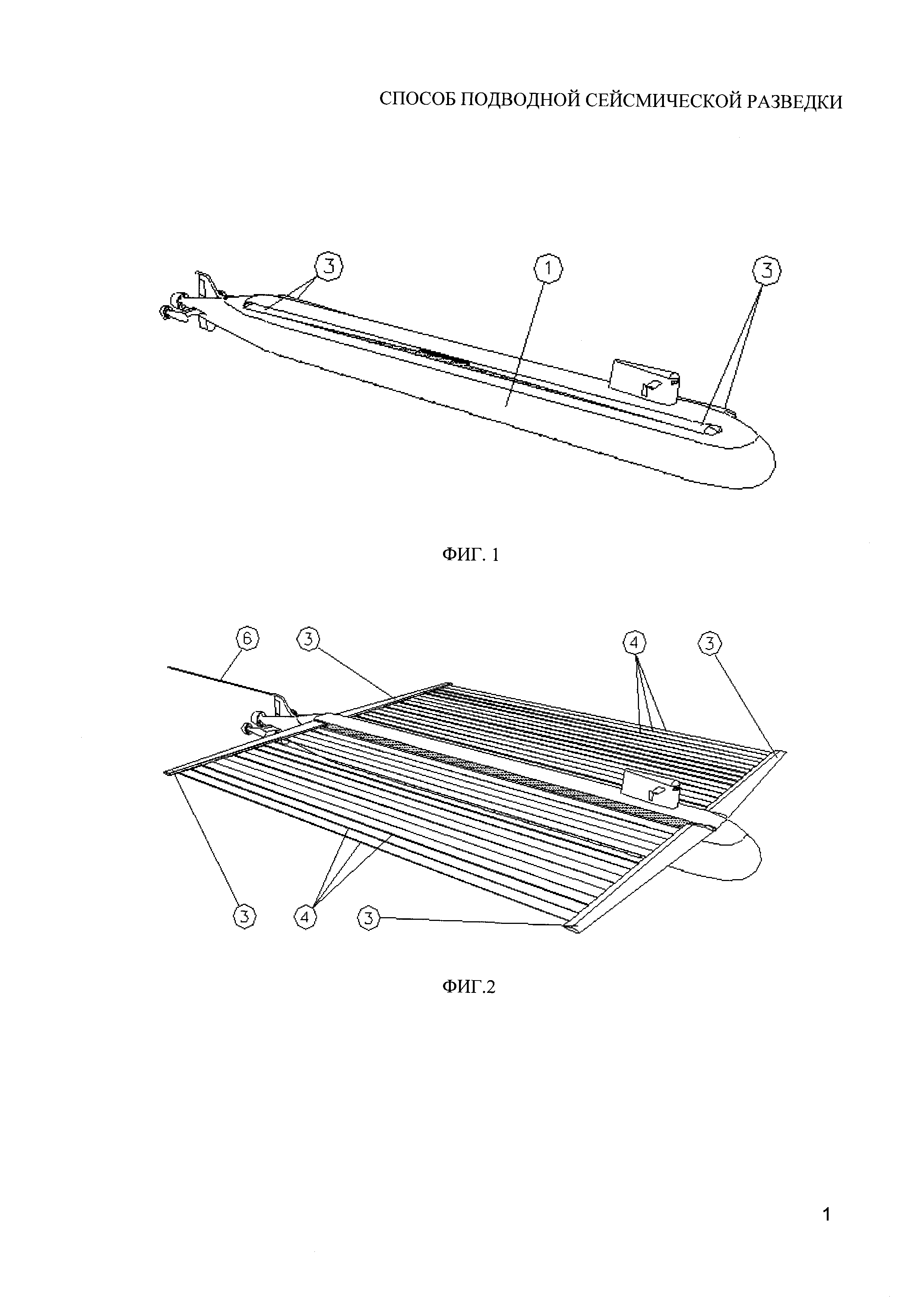
на фиг. 1 представлен изометрический вид подводного судна с техническими средствами сейсморазведки при переходе в район работ многомерной сейсмической разведки;
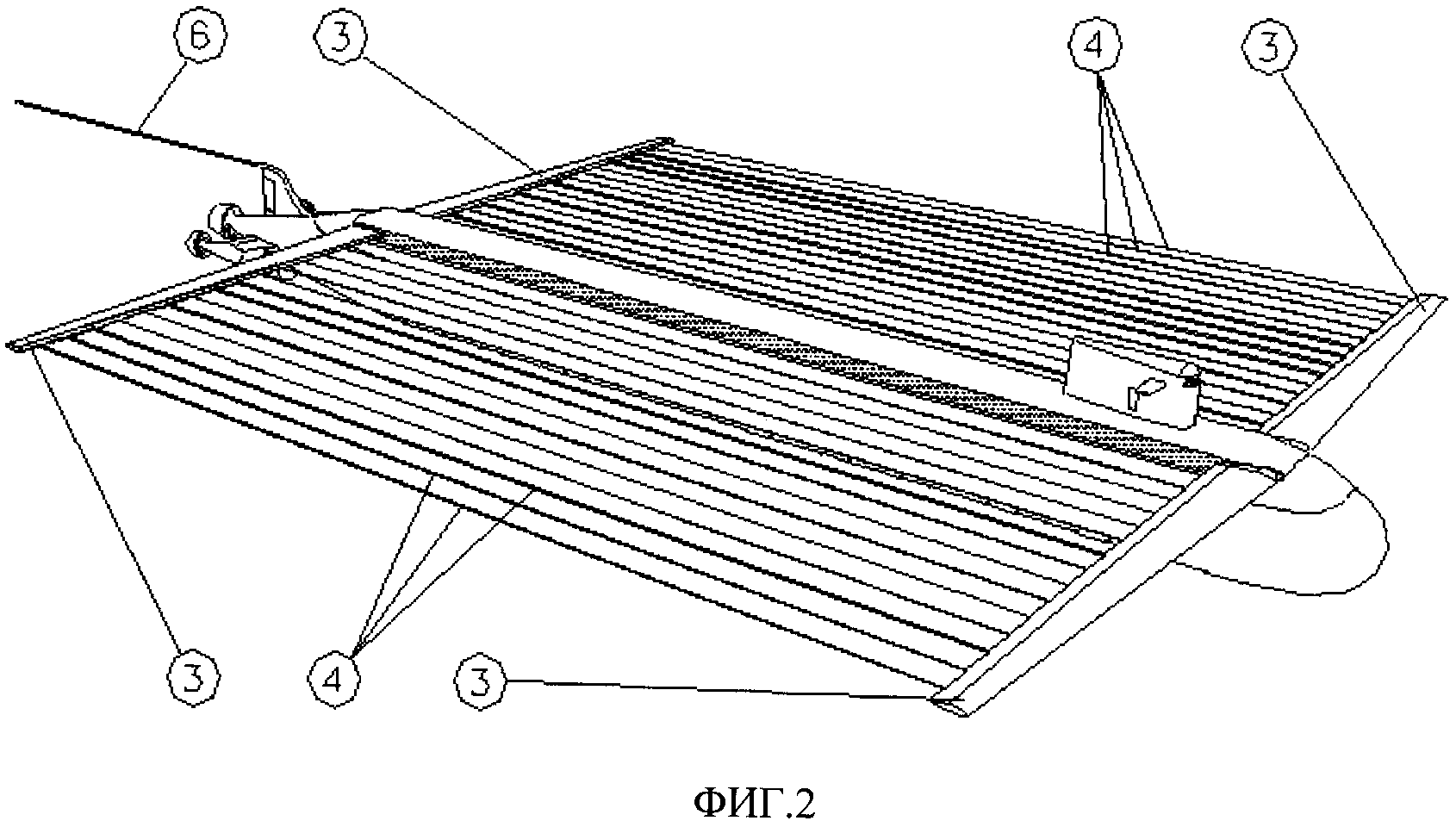
на фиг. 2 представлен изометрический вид рабочего положения подводного судна с развернутыми техническими средствами сейсморазведки;
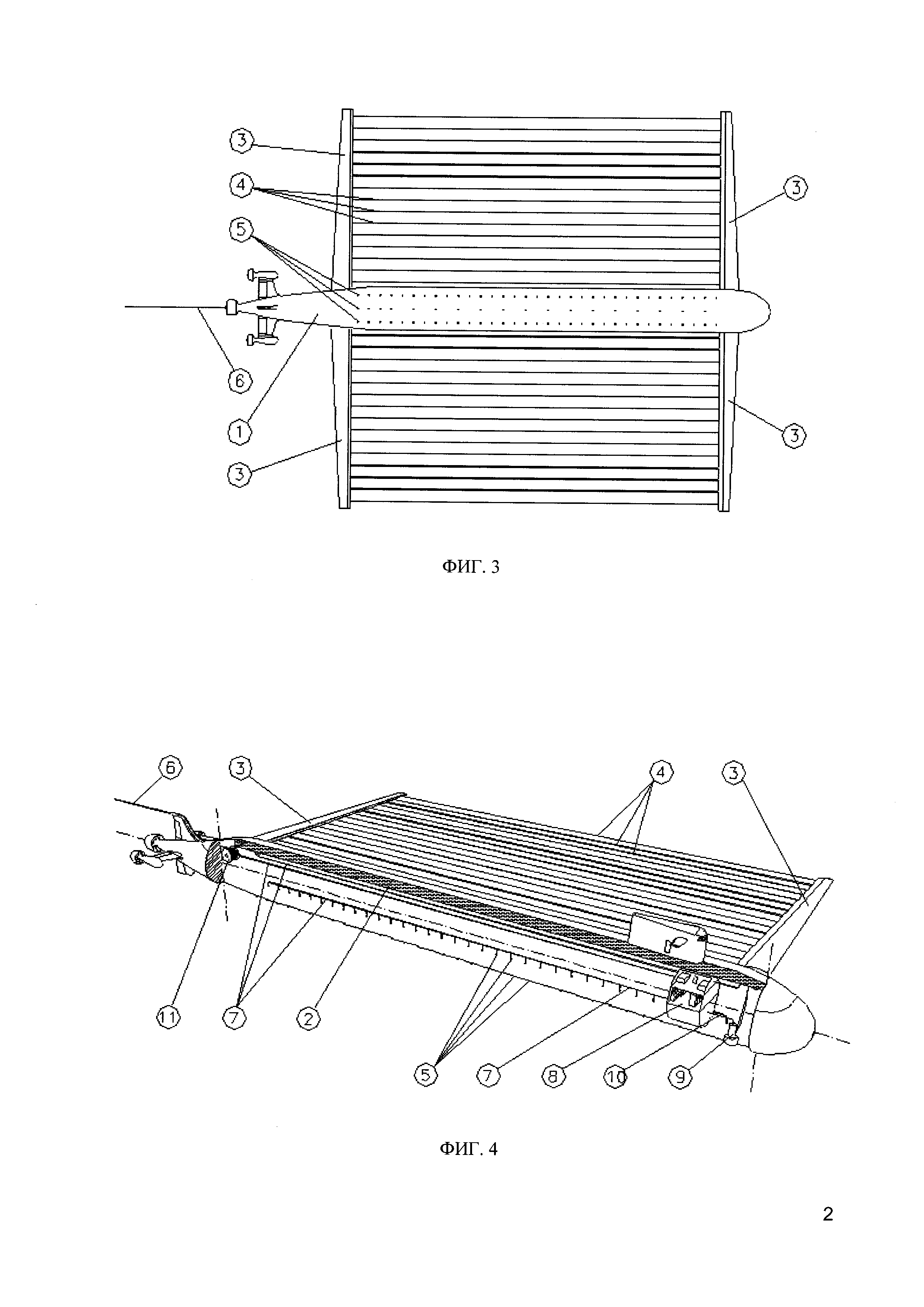
на фиг. 3 показан вид снизу на подводное судно с техническими средствами сейсморазведки;
на фиг. 4 представлен изометрический вид подводного судна с бортовым разрезом корпуса.
На чертежах представлено подводное судно с техническими средствами сейсморазведки, состоящее из корпуса (1); бортовых транспортировочных контейнеров (2); направляющих (3), выполненных с возможностью поворота из транспортировочных контейнеров (2) в рабочее положение; сейсмические косы (4) с возможностью выдвижения вдоль направляющих (3); стационарные сейсмические косы (5), размещенные на корпусе (1) подводного судна; одиночная сейсмическая коса (6), развертываемая с лебедки (11) за кормой подводного судна; кабели питания (7) для передачи регистрируемых колебаний на пост управления сейсморазведкой (8) на подводном судне; источник возбуждения упругих колебаний (9), соединенный кабелем питания (10) с постом управления сейсморазведкой (8).
Реализация способа подводно-подледной многомерной сейсмической разведки месторождений углеводородов заключается в следующем. По прибытии подводного судна с техническими средствами сейсморазведки в район работ многомерной сейсмической разведки для получения качественных кубов трехмерных данных высокого разрешения, выполняется поворот направляющих из транспортировочного контейнера в рабочее положение с каждого борта подводного судна. Далее сейсмические косы из транспортировочных контейнеров выдвигаются вдоль направляющих по всей длине с заданным шагом, установленным с поста управления сейсморазведки. Таким образом, развернутые сейсмические косы формируют рабочую площадную расстановку (пространственную сейсморегистрирующую решетку) с разрывом на ширину корпуса судна. Для ликвидации этого разрыва на корпусе подводного судна с его нижней части размещаются стационарные сейсмические косы. Для получения двухмерной скоростной модели строения среды и построения глубинной модели, а также для преобразований трехмерных данных, получаемых при обработке зарегистрированных материалов пространственной сейсморегистрирующей решетки, за кормой подводного судна развертывается буксируемая протяженная одиночная сейсмическая коса, многократно превышающая по длине подводное судно. Далее подводное судно в рабочем положении в заданном районе осуществляет сейсмосъемку с помощью источника возбуждения упругих колебаний с дальнейшей регистрацией их приемными сейсмическими косами, стационарными сейсмическими косами и одиночной сейсмической косой, соединенных кабелями питания с постом управления сейсморазведки. Возбуждение упругих колебаний предполагается осуществлять с постоянным временным интервалом, выбираемым с учетом скорости движения судна и глубинностью исследований, исходя из принципов формирования широко известной системы МОГТ (метод общей глубинной точки). В качестве одного или нескольких источников возбуждения упругих колебаний могут быть использованы различные существующие устройства, включая электроискровые, импульсные электромагнитные типа «Енисей» [5] и газодинамические [6], размещаемые под днищем подводного судна, за кормой или разнесенные по краям сейсморегистрирующей решетки.
Описанная выше пространственная решетка устраняет существенный недостаток прототипа - ограниченность максимальной площади решетки площадью бортов подводной лодки. Настоящее решение позволяет разворачивать решетки размером порядка 100×100 м и более в зависимости от типа подводной лодки, что является недостижимым результатом для прототипа.
Описанная выше пространственная сейсморегистрирующая решетка позволит получать качественные кубы трехмерных данных высокого разрешения, на которых будут надежно прослеживаться отражения от глубоких горизонтов и детально наблюдаться неоднородности в верхней части разреза (ВЧР) - это первые сотни метров, включая газовые карманы, газогидраты и пр. Выявление и учет угроз от опасных природных объектов в ВЧР повышают безопасность последующего поисково-разведочного и эксплуатационного бурения, т.е. безопасность освоения месторождения углеводородов.
Возможные многократные отраженные волны, осложняющие регистрируемые волновые поля, могут быть исключены с помощью существующих алгоритмов обработки. Однако короткие мобильные и стационарные сейсмические косы, длина которых определяется размерами подводного судна (транспортировочного контейнера), не позволят получить высокоточную скоростную модель для построения глубинной модели изучаемых геологической среды и нефтегазоперспективных объектов. Устранению данного недостатка способствует применение протяженной сейсмокосы, буксируемой за кормой судна и спускаемой с бортовой лебедки. При обработке упругих колебаний, регистрируемых данной сейсмокосой, будет получена двухмерная скоростная модель строения среды, которая может быть использована для глубинных миграционных преобразований куба данных 3D, получаемого при обработке данных пространственной сейсморегистрирующей решетки. Азимутальными различиями скоростей распространения упругих волн, вызванными анизотропными свойствами среды, можно пренебречь как бесконечно малыми величинами при распространении отраженных волн под углами, близкими к нормали по отношению к отражающим границам, т.е. для пространственной сейсморегистрирующей решетки, реализуемой в предлагаемом способе.
Регистрацию упругих колебаний, контроль качества получаемых материалов и предварительную обработку по технологии МОГТ или другими способами осуществляют в режиме, близком к реальному времени, на бортовом регистрирующем и обрабатывающем комплексе, расположенном на посту управления сейсморазведкой.
Предлагаемый способ подводно-подледной многомерной сейсмической разведки месторождений углеводородов применим на всех этапах геофизических исследований от региональной и детальной сейсморазведки 2D до 3D и 4D (сейсмический мониторинг). В зависимости от стадии геофизических работ и требуемой детальности исследований выбирается расстояние между параллельными галсами отработки профилей. Таким образом, на региональном этапе формируются полосы трехмерных наблюдений вдоль региональных профилей, а при проведении площадной сейсморазведки 3D формируется полноценный куб трехмерных данных за счет прохождения судна по площади согласно традиционной системе наблюдений МОГТ 3D.
В качестве экономического обоснования целесообразности реализации способа приведем результаты предварительного расчета производительности проведения сейсморазведки 3D на большой площади размером 40×40 км (1600 кв. км), аналогичной площади уникального по запасам Штокмановского газоконденсатного месторождения. При развертывании антенной решетки площадью 100×100 м и размещении двух источников упругих колебаний по ее краям потребуется пройти в общей сложности 10×40×40 погонных километров или всего 16 тыс. км. При скорости движения подводной лодки 4,5 узла (8,3 км/ч) потребуется 1928 ч непрерывной работы или 80 суток, а с учетом времени на смену галсов (+10%) - 88 суток. При небольшой скорости движения подводной лодки в 3 узла потребуется около 133 суток. Таким образом, отработка большой площади в 1600 кв. км всего за 3-4.5 месяца является очень хорошим результатом.
Предлагаемый способ может быть эффективен не только при проведении работ в ледовых условиях, но и в районах, свободных от льда, в которых применение традиционной сейсморазведки малоэффективно из-за частого простоя судна по погодным (штормовым) условиям.
Источники информации
1. Кравченко В.А., Плюшкин А.П., Мелехов Ю.С., Мерклин Л.Р., Лавковский С.А., Лебедев С.А. Способ проведения подводно-подледной геофизической разведки и технологический комплекс для его осуществления. Патент РФ 2388022, опубл. 27.04.2010.
2. Гальярди Д.Р., Райе Ш., Шнайдер К., Канкельман Д.В., Дадли Т.А., Ламберт Д., Бернхэм М. Морская сейсморазведка в покрытых льдом или имеющих препятствия водах. Патент 2487374, опубл. 10.07.2013.
3. Кортин П.И., Лебедев А.В., Вайнерман М.И. и др. Способ проведения 3D подводно-подледной сейсмоакустической разведки с использованием подводного судна. Патент 2485554, опубл. 20.06.2013.
4. Ряписов Е. Гидроакустические станции с гибкими протяженными буксируемыми антеннами ВМС США. Зарубежное военное обозрение, 1995, №9.
5. Левицкий Н.В., Детков В.А. О технологии сейсмических исследований глубоководных районов для Северного Ледовитого океана/Технологии сейсморазведки. №3, 2010.
6. Картаре А., Калькан Д., Сандрони С.Система для генерации волн сжатия в подводных условиях. Патент 2526600, опубл. 27.08.2014.
7. Arens Egidiud, Kuhnle Peter, Meyersieck Manfred, Schulte Alfred, Stumpff Ulrich. Submarine craft, патент ЕР 0214525 A1, опубл. 18.03.1987.
Морская полупогружная вертолетная платформа
Подводная буровая установка
Самоподъемная буровая установка
Способ сейсмического мониторинга в процесса разработки месторождений углеводородов на акваториях
Способ сейсмического мониторинга разработки месторождений углеводородов на акваториях
Способ контроля за освоением месторождения углеводородов
Подводный буровой комплекс
Система хранения и погрузки-разгрузки труб
Способ подготовки месторождения углеводородов к освоению
Одномодовый плазмонный волновод
Морская полупогружная вертолетная платформа
Подводная буровая установка
Самоподъемная буровая установка
Способ сейсмического мониторинга в процесса разработки месторождений углеводородов на акваториях
Способ сейсмического мониторинга разработки месторождений углеводородов на акваториях
Способ контроля за освоением месторождения углеводородов
Подводный буровой комплекс
Система хранения и погрузки-разгрузки труб
Способ подготовки месторождения углеводородов к освоению
Одномодовый плазмонный волновод

