Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ (ПЕЛЕНГА И ДИСТАНЦИИ) И ПАРАМЕТРОВ ДВИЖЕНИЯ (КУРСА И СКОРОСТИ) МОРСКОЙ ШУМЯЩЕЙ ЦЕЛИ
Вид РИД
Изобретение
Изобретение относится к области гидроакустики, а именно к пассивным способам определения координат (пеленга и дистанции) и параметров движения (курса и скорости) морской шумящей цели по информации шумопеленгаторных станций (далее ШПС), установленных на подвижных носителях (подводных лодках, надводных кораблях, подводных аппаратах) либо стационарно.
Известен способ определения координат и параметров движения цели (далее КПДЦ) путем обработки массива пеленгов цели, измеренных в N последовательные моменты времени с учетом собственного курса и скорости носителя [1-4]. В отечественной литературе данный способ называется "методом N-пеленгов", в англоязычной - "bearings-only tracking".
Наиболее близким по технической сущности к заявляемому изобретению является способ, описанный в работе [2].
Главным недостатком данного способа является то, что он требует специального маневрирования носителя ШПС по курсу либо скорости. Другим недостатком способа является длительное время решения задачи - несколько десятков минут при специальном маневрировании носителя.
Решаемая задача предлагаемого способа - совершенствование методов определения КПДЦ шумящей морской цели.
Достигаемый технический результат - уменьшение времени определения КПДЦ без специального маневрирования носителя ШПС.
Решение поставленной задачи и достижение указанного технического результата обеспечивается тем, что дополнительно к массиву пеленгов измеряют параметры сигнала цели (уровень сигнала, ширину спектра сигнала, крутизну наклона спектра сигнала цели и пр.), в результате обработки которых определяют тип цели и оценку дистанции до нее, затем определяют вероятностное распределение скорости цели, характерное для данного типа цели, а также вероятностные распределения оценок пеленгов и дистанций, которые учитывают при определении КПДЦ.
Способы определения типа шумящей цели описаны в работах [5-8].
Известно, что характерные скорости морских объектов разных типов различаются. Для примера на фиг. 1 приведены плотности распределения вероятностей (далее ПРВ) скорости для атомных и неатомных подводных лодок, а также для транспортных судов [17].
В качестве вероятностного распределения дистанции до цели целесообразно принять нормальное распределение с математическим ожиданием, равным оценке пеленга и дистанции до цели, получаемой одним из пассивных физических методов, основанных на обработке измеренных параметров сигнала цели [9-13], и среднеквадратическим отклонением, равным среднеквадратической ошибке (далее СКО) этой оценки.
В качестве вероятностного распределения пеленга цели целесообразно принять нормальное распределение с математическим ожиданием, равным оценке пеленга, и среднеквадратическим отклонением, равным СКО этой оценки, определяемой по известной формуле, например [14, с. 291, формула (3.3.48)].
С использованием перечисленных данных КПДЦ определяются в соответствии с алгоритмом, синтезированным по критерию максимального правдоподобия. При синтезе алгоритма предполагается, что цель движется галсами с постоянным вектором скорости на каждом галсе, носитель ШПС движется произвольно (в частном случае стоит на месте). Алгоритм функционирует циклически, включаясь после каждого поступления на его вход новой оценки пеленга цели либо новой оценки дистанции до цели. При вычислении КПДЦ на каждом цикле учитываются все оценки пеленгов и дистанций, полученные с начала текущего галса. После завершения маневра цели вычисление КПДЦ начинается заново. При этом оценки КПДЦ, полученные на момент завершения предыдущего галса, используются в качестве начального приближения для оценок КПДЦ на новом галсе. Решение о смене галса цели принимается, если выполнено хотя бы одно из следующих условий:
- обнаружено изменение скорости цели по изменению частот дискретных составляющих вально-лопастного звукоряда в спектре несущей либо амплитудной огибающей шума цели [15];
- обнаружено изменение курса цели по раздвоению дискретных составляющих вально-лопастного звукоряда в спектре несущей либо амплитудной огибающей шума цели [15];
- обнаружено изменения курса либо скорости цели по превышающему пороговое значение отличию измеренного пеленга цели от экстраполированного по данным предыдущих измерений [16];
- выявление маневрирования цели по превышающему пороговое значение изменению уровня сигнала цели, не связанному с изменением аномалии его распространения.
Алгоритм, реализуемый на K-м с начала текущего галса цикле определения КПДЦ, имеет вид:
где  ,
,  ,
,  ,
,  - оптимальные оценки соответственно курса K, скорости V, пеленга PK и дистанции RK;
- оптимальные оценки соответственно курса K, скорости V, пеленга PK и дистанции RK;
gV(ν) - ПРВ скорости цели соответствующего типа;
 - нормальная плотность распределения вероятности оценки пеленга цели
- нормальная плотность распределения вероятности оценки пеленга цели  с математическим ожиданием Р(tj, K, V, tK, PK, RK) и среднеквадратическим отклонением
с математическим ожиданием Р(tj, K, V, tK, PK, RK) и среднеквадратическим отклонением  ;
;
 - нормальная плотность распределения вероятности оценки дистанции цели
- нормальная плотность распределения вероятности оценки дистанции цели  с математическим ожиданием Rj и среднеквадратическим отклонением
с математическим ожиданием Rj и среднеквадратическим отклонением  ;
;
P(tj, K, V, tK, PK, RK) - функция, связывающая истинное значение пеленга Р цели на j-м цикле с истинными значениями курса K и скорости цели V, а также пеленга цели PK и дистанции до нее RK на текущий момент времени tK:

Xц(tj, K, V, tK, РК, RK), Yц(tj, K, V, tK, PK, RK) - декартовы координаты цели на момент времени tj, вычисляемые по формулам:

Xн(tj), Yн(tj) - истинные декартовы координаты наблюдателя на момент времени tj;
 ,
,  - СКО оценки пеленга и дистанции на j цикле определения КПДЦ соответственно;
- СКО оценки пеленга и дистанции на j цикле определения КПДЦ соответственно;
 ,
,  - индикаторы наличия оценок соответственно пеленга и дистанции на j цикле определения КПДЦ, принимающие значение 1 при наличии оценки и 0 в противном случае.
- индикаторы наличия оценок соответственно пеленга и дистанции на j цикле определения КПДЦ, принимающие значение 1 при наличии оценки и 0 в противном случае.
Описанный алгоритм функционирует следующим образом.
1) С момента обнаружения цели начинается ее сопровождение по пеленгу с циклическим измерением (кроме пеленга) параметров ее сигнала (далее - параметров), необходимых для определения типа цели и оценки дистанции до нее.
2) После обнаружения цели с использованием измеренных параметров определяется ее тип.
3) В соответствии с определенным типом цели из базы данных извлекается ПРВ скорости цели.
4) С использованием параметров, измеренных ШПС, циклически определяется оценка дистанции до цели физическими методами, основанными на обработке измеренных параметров сигнала цели [9-13], и среднеквадратическое отклонение этой оценки.
5) После каждого нового определения пеленга либо дистанции цели все оценки пеленга и дистанции, полученные с момента обнаружения цели, вместе с ПРВ скорости цели используются в ходе процедуры поиска значений  ,
,  ,
,  ,
,  , максимизирующих функцию (1).
, максимизирующих функцию (1).
6) Одновременно с определением КПДЦ выполняется проверка наличия маневра цели по курсу и/или скорости. Если маневр цели обнаружен, принимается решение о смене галса цели, счетчик номера цикла обнуляется и работа алгоритма начинается сначала. При этом оптимальные значения КПДЦ, соответствующие окончанию предыдущего галса, принимаются в качестве начального приближения при определении КПДЦ на новом галсе.
В качестве иллюстрации заявляемого способа на фиг. 2 приведены результаты его математического моделирования. Цель и носитель ШПС движутся с постоянным вектором скорости (т.е. не маневрируют). Носитель ШПС движется курсом 0° со скоростью 6 уз. Цель движется курсом 90° со скоростью 15 уз. Пеленг обнаружения цели равен 300°. Дистанция обнаружения цели имеет 5 значений: 10, 15, 20, 50 и 100 км (на фиг. 2 цветом графиков закодирована начальная дистанция до цели: 10 км - синий, 15 км - черный, 20 км - голубой, 50 км - зеленый, 100 км - розовый).
На вход алгоритма в ходе моделирования подавались:
- оценки пеленга цели с интервалом в 3 сек с СКО 0,5°;
- оценки дистанции цели с использованием комбинации энергетического и динамического физических методов [11] в моменты 0, 2 и 5 минут с момента обнаружения цели с СКО соответственно 30%, 25% и 20%.
Моделирование осуществлялось методом Монте-Карло путем 100-кратного проигрывания процесса определения КПДЦ с последующим вычислением оценок КПДЦ для каждого момента времени.
Из рассмотрения фиг. 2 следуют следующие выводы:
- СКО оценок каждого из 4-х параметров КПДЦ первые 5 минут с момента обнаружения цели практически монотонно уменьшаются, далее они стабилизируются;
- через 5 минут с момента обнаружения СКО оценок КПДЦ составляют (в зависимости от начальной дистанции): 15-20% по дистанции, 1,6-1,8 уз по скорости, 7-13° по курсу и 5-7 угловых минут по пеленгу.
Выполненное математическое моделирование предложенного способа показало, что он обеспечивает достаточно высокую точность определения КПДЦ за более короткое время по сравнению с методом "N-пеленгов" [2] без специального маневрирования носителя ШПС.
Источники информации
1. Справочник вахтенного офицера. - М.: Воениздат, 1975, 455 с.
2. Беляев Б.Л., Кузьменко Ю.А., Панкратьев В.В., Степанов Д.В. Об ожидаемом качестве оценок определения координат и параметров движения цели методом «N-пеленгов» при выбранном варианте собственного маневрирования / Сборник докладов научно-технической конференции «Состояние, проблемы и перспективы создания корабельных информационно-управляющих комплексов». М., 2011, с. 97-101.
3. Benlian Xu В., Wang Z. An adaptive tracking algorithm for bearings-only maneuvering target // International Journal of Computer Science and Network Security. - Vol. 7, No. 1. 2007. P. 304-312.
4. Landelle B. Robustness considerations for bearings-only tracking. - 11th International Conference on Information Fusion. France: Thales Optronique, Universite Paris-Sud. 2008. P. 8.
5. Телятников В.И. Методы и устройства классификации гидроакустических сигналов. Зарубежная радиоэлектроника, 1979, №9, с. 19-38.
6. Машошин А.И. Особенности синтеза алгоритмов классификации морских объектов по их гидроакустическому полю // Морская радиоэлектроника, 2009, №2 (28), с. 8-12.
7. Chen С.-Н., Lee J.-D., Lin М.-С. Classification of Underwater Signals Using Neural Networks. - Tamkang Journal of Science and Engineering, 2000, vol. 3, No. 1, pp. 31-48.
8. Sutin A. etc. Stevens Passive Acoustic System for underwater surveillance. - International Waterside Security Conference (WSS), 2010, Carrara.
9. Телятников В.И. Методы и устройства для определения местоположения источника звука // Зарубежная радиоэлектроника, 1978, №4, с.
10. Машошин А.И. Синтез оптимального алгоритма пассивного определения дистанции до цели // Морская радиоэлектроника, 2012, №2 (40), с. 30-34.
11. Гриненков А.В., Машошин А.И., Шафранюк Ю.В. Оценка точности пассивного определения дистанции до цели физическими методами // Фундаментальная и прикладная гидрофизика, 2016, том 9, №2, с. 81-87.
12. Патент РФ №2208811.
13. Патент РФ №2128848.
14. Малышкин Г.С. Оптимальные и адаптивные методы обработки гидроакустических сигналов. Т. 1. Оптимальные методы. - ОАО "Концерн "ЦНИИ "Электроприбор", 2009.
15. Кудрявцев А.А., Лугинец К.П., Машошин А.И. Об амплитудной модуляции подводного шумоизлучения гражданских судов // Акустический журнал, 2003, том 49, №2, с. 224-228.
16. Кузьмин С.З. Цифровая обработка радиолокационной информации // М.: Сов. радио, 1974.
17. Евтютов А.П., Митько В.Б. Инженерные расчеты в гидроакустике. - Л.: Судостроение, 1988. - 288 с.
Способ определения координат и параметров движения морской шумящей цели (КПДЦ) по информации шумопеленгаторной станции (ШПС), установленной на подвижном неманеврирующем носителе либо стационарно, заключающийся в измерении в последовательные моменты времени массива пеленгов цели, а также курса и скорости носителя ШПС, при этом предполагают, что морская шумящая цель движется галсами с постоянным вектором скорости на каждом галсе, отличающийся тем, что ШПС обнаруживает цель, сопровождает ее по пеленгу с циклическим измерением параметров сигнала цели - уровня сигнала, ширины спектра сигнала, крутизны наклона спектра, по которым в ШПС определяют тип цели и оценивают дистанцию до нее, определяют вероятностное распределение скорости цели, а также вероятностные распределения оценок пеленгов и дистанций для данного типа цели, причем при определении КПДЦ на каждом цикле измерения учитывают все оценки пеленгов и дистанций, полученных с начала текущего галса, решение о смене галса принимают, если выполнено хотя бы одно из следующих условий: обнаружено изменение скорости цели по изменению частот дискретных составляющих в спектре несущей либо амплитудной огибающей шума цели, обнаружено изменение курса цели по раздвоению дискретных составляющих в спектре несущей либо амплитудной огибающей шума цели, обнаружено изменение курса либо скорости цели по превышающему пороговое значение отличию измеренного пеленга цели от экстраполированного по данным предыдущих измерений, выявлено маневрирование цели по превышающему пороговое значение изменению уровня сигнала цели, не связанному с изменениями аномалии его распространения, на основании полученных данных по критерию максимального правдоподобия определяют оптимальные оценки КПДЦ - курса, скорости, пеленга и дистанции на К-м с начала текущего галса цикле.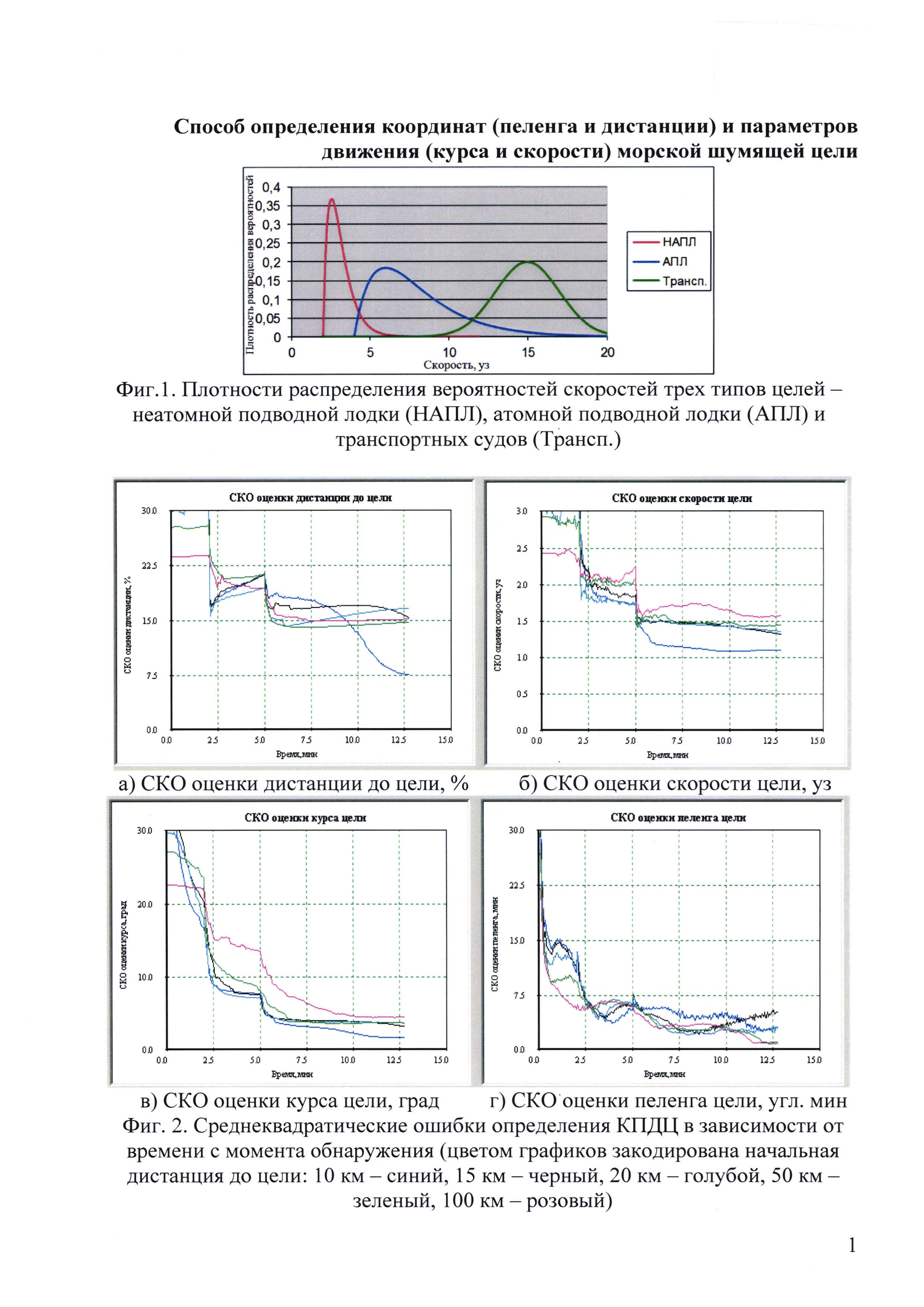
Способ измерения физической неэлектрической величины
Способ выставки осевого зазора в газодинамическом подвесе оси вращения ротора гиромотора
Стенд для выработки угловых колебаний в двух плоскостях
Устройство для напыления тонкопленочных покрытий на сферические роторы электростатического гироскопа
Способ обнаружения и сопровождения целей циклически работающей системой наблюдения, состоящей из нескольких разнородных приемных каналов
Микромеханический вибрационный гироскоп
Способ определения погрешностей двухстепенного поплавкового гироскопа с газодинамическим подвесом ротора гиромотора
Способ бесплатформенной инерциальной навигации на микромеханических чувствительных элементах
Способ изготовления ротора электростатического гироскопа
Двухстепенной поплавковый гироскоп
Способ обработки информации в гидроакустической антенне
Способ оценки полного профиля вертикального распределения скорости звука
Способ получения упругого и звукопоглощающего полимерного материала с термопластичными микросферами
Бескорпусная гидроакустическая антенна
Способ обнаружения и сопровождения целей циклически работающей системой наблюдения, состоящей из нескольких разнородных приемных каналов
Шкаф радиоэлектронной аппаратуры
Способ формирования характеристики направленности плоской, горизонтально расположенной многоэлементной излучающей антенны доплеровского лага
Способ измерения скорости судна доплеровским лагом
Способ измерения скорости судна доплеровским лагом
Способ измерения скорости судна доплеровским лагом

