Результат интеллектуальной деятельности: Способ бесконтактной ультразвуковой дефектоскопии с использованием эффекта Доплера
Вид РИД
Изобретение
Изобретение относится к области ультразвукового (УЗ) бесконтактного неразрушающего контроля изделий, может преимущественно использоваться для обнаружения и оценки дефектов в длинномерных изделиях, в частности, в рельсах железнодорожного транспорта, метрополитена, в трубах, в штангах различного назначения при высоких скоростях относительного движения между излучающе-приемной системой и контролируемым изделием. Заявляемое техническое решение рассмотрено на примере контроля железнодорожных рельсов при наклонном вводе ультразвуковых колебаний.
Для обнаружения опасных дефектов в виде трещин разной ориентации в длинномерных изделиях используют наклонный ввод УЗ колебаний. При контроле высокими скоростями сканирования (близкими к скоростям движения поездов - до 120 км/ч) необходимо обеспечить бесконтактный ввод и прием УЗ колебаний. При бесконтактном вводе УЗ колебаний с помощью электромагнитно-акустического (ЭМА) возбуждения, лазерной генерации или импульсным пучком заряженных частиц в контролируемом изделии формируются диаграммы направленности, представляющие из себя два противоположно направленных симметричных лепестка (при ЭМА - с максимальным углом излучения около ± 30° [1], при термоупругом возбуждении - с максимумом под углом ± 55°) [2].
При сканировании изделия двойной диаграммой направленности возникают определенные проблемы с селекцией сигналов, связанные со сложностью локализации дефектов. Например, известен способ ЭМА дефектоскопии металлических изделий [3], заключающийся в том, что на изделии устанавливают ЭМА дефектоскоп, излучающий акустические зондирующие сигналы, направленные в плоскости зондирования вглубь изделия зеркально под известными углами, перемещают дефектоскоп по изделию с известной скоростью, принимают сигналы, отраженные от возможных дефектов, определяют глубину их залегания.
Недостатками способа [3] являются низкая точность и производительность дефектоскопии. Низкая точность обусловлена следующим. В статическом положении ЭМА дефектоскоп возбуждает двунаправленные УЗ колебания в изделии. Сигналы, отраженные от возможных дефектов, принимаются в виде одиночных радиоимпульсов. В результате оказывается невозможным определить, какое направление УЗ зондирующих сигналов обнаружило дефект. Для решения этой задачи в известном способе предполагают, что при перемещении ЭМА дефектоскопа изменяется амплитуда зондирующих сигналов. Тогда одно из направлений УЗ зондирований, «задний» лепесток [3], считают не существенным и исключают из рассмотрения.
При таком подходе не учитываются помехи, связанные с обнаружением дефектов «задним» лепестком, что снижает точность дефектоскопии.
Низкая производительность дефектоскопии обусловлена тем, что однонаправленное УЗ зондирование в способе [3] предлагают проводить при обратном перемещении ЭМА дефектоскопа, что увеличивает время дефектоскопии в 2 раза.
При значительных скоростях сканирования весьма ярко проявляется известный эффект Доплера, когда частота эхо-сигнала fэ, принимаемая от дефекта, отличается от частоты излучения УЗ колебаний f0 на величину доплеровского сдвига Fд:

где

v - скорость сканирования;
с - скорость распространения УЗ колебаний;
α - угол ввода УЗ луча в контролируемое изделие.
Выбор знака между слагаемыми в (1) зависит от направления движения: при взаимном приближении ПЭП и дефекта (+), при удалении (-).
Целесообразность использования эффекта Доплера применительно к дефектоскопии показана еще в [4]. Для дополнительного повышения помехозащищенности при переменной скорости сканирования в [5] предложено регулировать полосу пропускания приемника (точнее полосу фильтра выделения доплеровской частоты) дефектоскопа в зависимости от скорости.
Дальнейшее развитие указанного направления повышения эффективности УЗ дефектоскопии изделий при высоких скоростях сканирования получило в технических решениях [6], [7] и [8], где используется независимость числа периодов доплеровской частоты в эхо-сигнале конкретного дефекта от скорости [6] и возможность выделения с помощью узкополосных фильтров крайних участков доплеровского спектра [7] для определения параметров выявляемых дефектов [8]. Общим недостатком известных технических решений [4-8] является узкая область применения, ориентированная только на их использование при непрерывном излучении УЗ колебаний и контактном способе ввода/приема УЗ колебаний.
Такое решение является более универсальным техническим решением, направленным на бесконтактный ввод и прием УЗ колебаний при высокоскоростном контроле изделий. Основная идея способа [9] заключается в выделении сигналов, имеющих доплеровский сдвиг частоты. В процессе относительного движения БАП и контролируемого изделия излучают в изделие УЗ колебания на заданной частоте под определенным углом, при известной скорости сканирования принимают отраженные эхо-сигналы и выделяют эхо-сигналы от дефектов с учетом доплеровского сдвига частоты. Причем, на примере контроля железнодорожных рельсов показано, что увеличение скорости сканирования (вагона-дефектоскопа) приводит к более выраженному эффекту Доплера и лучшей эффективности.
Недостатком способа [9], принятого за прототип, является низкая помехозащищенность, а значит, и низкая достоверность результатов контроля, вызванная неполным использованием информативных параметров эхо-сигналов, получаемых при высокоскоростном сканировании. Кроме того, в известном способе не учтено, что при рассматриваемых бесконтактных способах возбуждения наиболее эффективно наклонный ввод УЗ колебаний осуществляется с формированием двухлепестковой (симметричной) диаграммы направленности (ДН). Игнорирование этой особенности дополнительно снижает достоверность контроля.
Целью изобретения является повышение достоверности обнаружения дефектов при наличии относительного высокоскоростного движения между излучающе-приемной системой и контролируемым изделием за счет использования тонкой структуры УЗ эхо-сигналов от дефектов с учетом эффекта Доплера.
Техническим результатом реализации заявляемого способа является повышение достоверности обнаружения дефектов при бесконтактном УЗ контроле на значительных скоростях сканирования.
Для достижения этого результата в способе бесконтактной ультразвуковой дефектоскопии с использованием эффекта Доплера, заключающемся в том, что в процессе относительного движения БАП и контролируемого изделия на заданной частоте излучают в изделие УЗ колебания с симметричной в плоскости зондирования диаграммой направленности с известными углами, принимают отраженные эхо-сигналы, при известной скорости сканирования вычисляют доплеровский сдвиг частоты эхо-сигналов, дополнительно с необходимой дискретностью определяют мгновенные частоты эхо-сигналов, принятых в пределах противоположно направленных основных лепестков диаграммы направленности БАП, по направлению и величинам их изменения и по взаимному положению групп эхо-сигналов, принятых указанными лепестками диаграммы направленности, определяют наличие и положение дефекта.
Существенными отличиями заявляемого способа по сравнению с прототипом является учет изменения доплеровского сдвига (частоты эхо-сигнала) в процессе озвучивания дефекта и учет разнонаправленной девиации этой частоты при последовательном озвучивании дефекта передним («наезжающим») и задним («отъезжающим») лепестками диаграммы направленности БАП. Кроме того, по временному (пространственному) интервалу между группами (пачками) сигналов, принятыми указанными лепестками ДН, появляется возможность определить положение искомого дефекта внутри контролируемого изделия, что совместно с отмеченными выше частотными признаками является дополнительным признаком сигналов от дефекта.
В способе [9] не учтено, что частота эхо-сигнала зависит не только от скорости сканирования, но и от переменного (в пределах диаграммы направленности), угла ввода/приема УЗ колебаний, который в процессе озвучивания дефекта меняется. Также в [9] исходят из предположения, что при бесконтактном возбуждении УЗ колебаний в изделии формируется однонаправленная ДН. Как известно, что при практической реализации наиболее эффективное и устойчивое возбуждение УЗ колебаний в твердых телах удается осуществить при формировании двунаправленной ДН, симметричной в плоскости зондирования [1, 2]. Отсутствие учета этих немаловажных факторов при обработке принимаемых в процессе сканирования эхо-сигналов приводит к снижению достоверности контроля.
Заметим, что некоторые отличия в выражении для определения доплеровского смещения в прототипе, от выражения (2) в данном тексте, объясняются особенностями отсчета угла ввода УЗ колебаний в контролируемое изделие. В отечественной практике угол ввода а колебаний отсчитывается от нормали к поверхности сканирования.
В реальных ситуациях, при любом способе возбуждения УЗ колебаний (бесконтактными лазером, электромагнитно-акустическом излучением или импульсным пучком заряженных частиц) при приеме отраженных от внутреннего дефекта эхо-сигналов, в контролируемом изделии формируется симметричная результирующая диаграмма направленности с центральными углами ввода + α0 и - α0, и, как правило, с идентичными углами раскрытия 2ϕр. В процессе сплошного сканирования контролируемого изделия со скоростью vc, при приближении к локальному внутреннему дефекту в начальный момент времени озвучивание дефекта происходит краем наезжающего лепестка ДН под углом αн=(α0+ϕр). При этом в соответствии с (1) и (2), где α=αн=(α0+ϕр), УЗ эхо-сигнал имеет частоту fns (come near, start) составляющую

По мере движения БАП в зоне локации ΔL дефекта, происходит постепенный «наезд» ДН на дефект, при этом преимущественное озвучивание дефекта происходит под углом α0, а мгновенная частота эхо-сигнала определяется выражениями (1 и 2), где α=α0.
В дальнейшем начинается «съезд» наезжающего лепестка ДН УЗ луча с плоскости отражателя и озвучивание дефекта происходит под утлом αк=(α0-ϕр),

В результате, частота заполнения эхо-сигналов в процессе сканирования, определяемая как разность (4) и (3), меняется на величину

Отсюда следует очевидный вывод, что чем шире ДН (значение ϕр) БАП, тем больше изменение частоты (девиация) ΔfЭ частоты эхо-сигнала в процессе локации дефекта.
Аналогично происходит формирование эхо-сигналов и соответствующее изменение их частоты заполнения при последующем озвучивании дефекта задним, «отъезжающим» лепестком ДН БАП. Однако, в отличие от озвучивания наезжающим лепестком ДН, в выражении (1) между слагаемыми берется знак (-), т.е. эхо-сигналы, формируемые отъезжающим лепестком ДН имеют частоту меньшую, чем частота излучения f0 на величину, определяемую доплеровским сдвигом. Причем, изменение этой частоты в пределах основного лепестка ДН происходит в противоположном направлении, т.к. озвучивание дефекта в начальный момент происходит под углом - (α0-ϕр), a впоследствии, под углами - α0 и - (α0+ϕр). При условии симметричности ДН, состоящей из двух противоположно направленных основных лепестков, величина девиации ΔfЭ частоты эхо-сигнала и при озвучивании отъезжающим лепестком ДН также определяется выражением (5).
Заявляемый способ иллюстрируют следующие графические материалы:
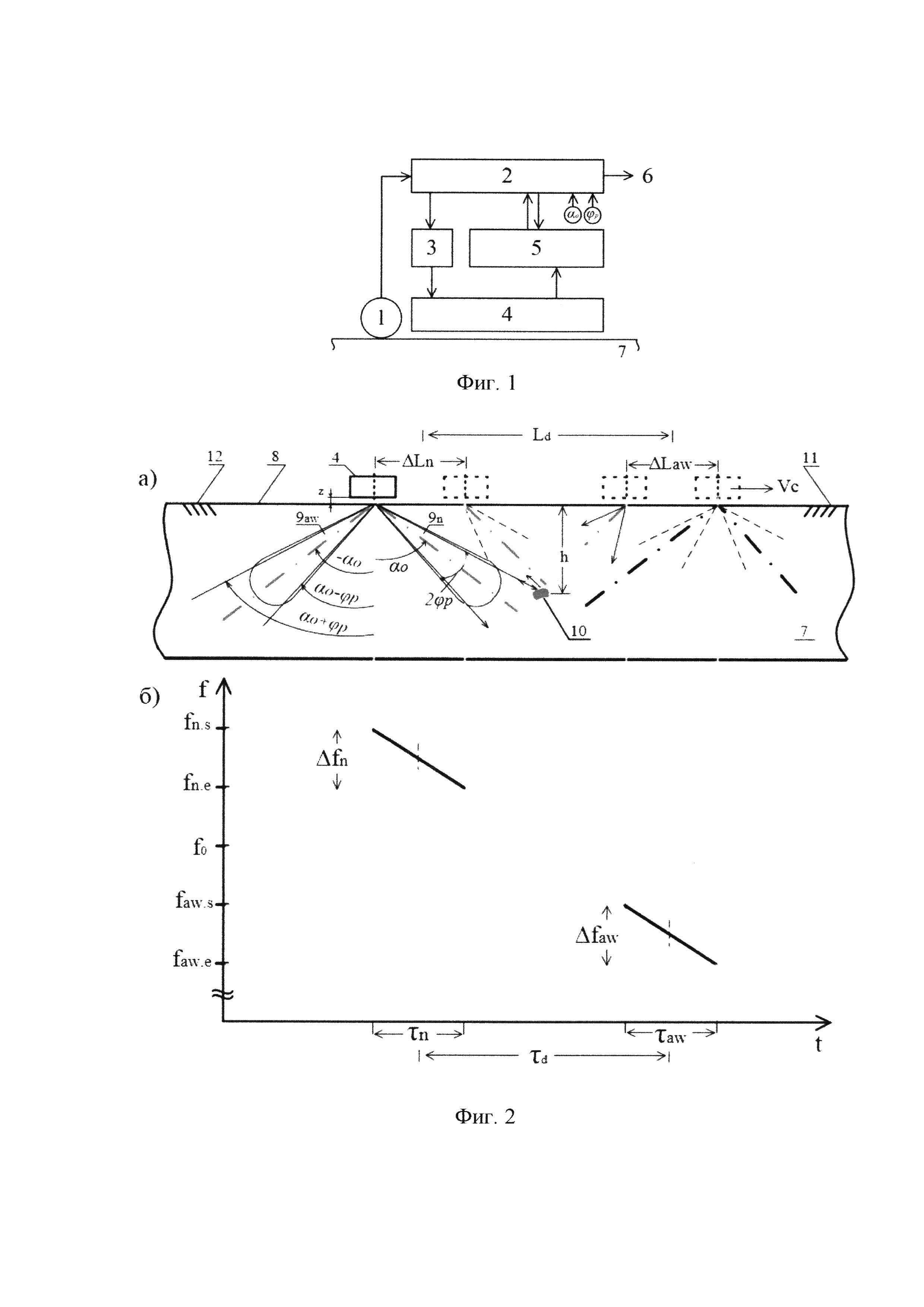
Фиг. 1 - Укрупненный вариант функциональной схемы дефектоскопа для реализации заявляемого способа, где:
1. Датчик пути (одометр) относительного перемещения БАП 4 и контролируемого изделия.
2. Вычислитель.
3. Формирователь зондирующих УЗ сигналов (генератор зондирующих колебаний УЗ частоты).
4. Бесконтактный акустический преобразователь (БАП).
5. Приемник эхо-сигналов.
6. Выход вычислителя.
Фиг. 2а. Схема УЗ озвучивания локального дефекта наклонным БАП, формирующим двухлучевую диаграмму направленности, где:
7. Контролируемое изделие (например, рельс).
8. Поверхность сканирования изделия.
9. Двухлепестковая диаграмма направленности БАП:
10. Локальный дефект в изделии.
11. Поверхностные повреждения изделия по ходу движения БАП.
12. Поверхностные повреждения изделия против направления движения БАП.
Фиг. 2б. Отображение частот заполнения эхо-сигналов, принимаемых наезжающим и отъезжающим лепестками ДН БАП, на координатной плоскости «частота f - время t перемещения БАП», где ось времени соотнесена с траекторией перемещения БАП вдоль поверхности контролируемого изделия (см. Фиг 2а).
Фиг. 3. Отображение двухлепестковой диаграммы направленности БАП в декартовой системе координат (Фиг. 3а) и размещение частотных спектров УЗ эхо-сигналов и помех на оси частот (Фиг. 3б), где:
Sn и Saw - зоны спектральных составляющих частот УЗ эхо-сигналов от внутренних дефектов;
Аn и Aaw - спектральные составляющие частот УЗ сигналов от возможных помех (неровностей и микротрещин 11 и 12 на поверхности сканирования), принятых боковыми лепестками ДН при углах α, близких к 90°;
В - частотный спектр УЗ сигналов от возможных неровностей противоположной поверхности изделия, принятые боковыми лепестками ДН при углах α, близких к 0°.
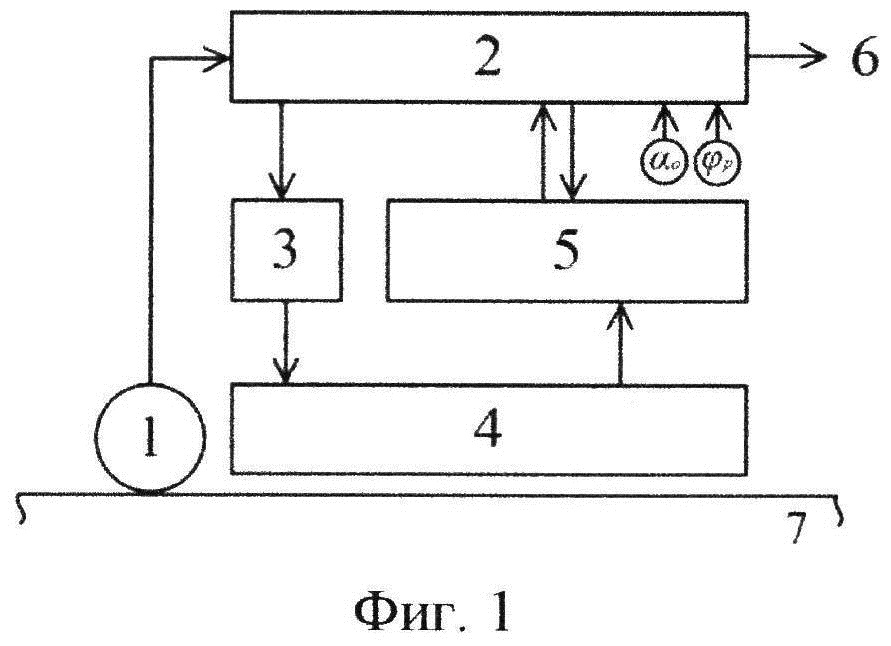
Фиг. 4 - Изменение частот заполнения УЗ эхо-сигналов (Фиг. 4а) и изменения временных положений эхо-сигналов на развертке типа В (Фиг. 4б). Для наглядности положения сигналов на Фиг. 4а отображены на оси модуля доплеровских частот.
Рассмотрим процесс реализации заявляемого способа бесконтактной УЗ дефектоскопии с использованием эффекта Доплера.
Устройство, реализующее способ, состоит из последовательно соединенных (Фиг. 1) датчика перемещения 1, вычислителя 2, формирователя зондирующих колебаний 3, бесконтактного акустического преобразователя (БАП) 4, приемника эхо-сигналов 5, выход которого соединен с входом вычислителя 2. Управление параметрами (усиление, выбор полосы частот) приемника 5 производится вычислителем 2. Обработанные по рассмотренным алгоритмам сигналы вычислителя 2 подаются на выход 6 для дальнейшего документирования и включения дефектоотметчика (на Фиг. не показан). Построение основных узлов устройства, реализующего предлагаемый способ, очевидно и не вызывает затруднений при реализации.
В качестве способа бесконтактного ввода и приема УЗ колебаний в известном решении [9] предлагаются несколько вариантов реализации. Наиболее практичными из которых, по мнению автора данной заявки, являются два способа: лазерное (оптико-термическое) возбуждение УЗ колебаний и прием с помощью бесконтактного электромагнитно-акустического (ЭМА) приемника и второй вариант - ЭМА возбуждение и ЭМА прием УЗ эхо-сигналов от возможных внутренних дефектов.
Относительно широкое распространение получил ЭМА-метод [1, 2 и 10]. Это связано с его сравнительно большими функциональными возможностями: обратимостью, способностью генерации в материалах различных типов акустических волн - продольных, сдвиговых и волн Рэлея.
Можно выделить два основных элемента конструкции БАП 4 - ЭМА преобразователя [10]: магнитную систему, состоящую из магнита (набора постоянных магнитов или электромагнита) и магнитопровода, формирующих поле намагничивания; индуктора, как правило, представляющего собой эллиптическую (или любой другой конфигурации) плоскую катушку индуктивности (или несколько катушек).
При больших скоростях сканирования в качестве системы намагничивания в ЭМА преобразователях можно использовать известные технические решения [11-13], когда полюсами электромагнитов служат колеса тележки подвижной единицы, а индуктор (плоская катушка) расположен вблизи или непосредственно под колесом в кольцевых выемках колеса.
Большей степенью дистанционности обладают способы возбуждения акустических колебаний оптико-термическим (лазерным) и радиационно-акустическим методами [14-16]. Отраженные от дефектов УЗ эхо-сигналы при этом могут быть зафиксированы ЭМА приемниками и обработаны предложенным выше способом с учетом доплеровского сдвига частоты и внутри-сигнальной частотной модуляции.
Выбор конкретных способов бесконтактного возбуждения/приема УЗ колебаний зависит от условий контроля, реализуемых скоростей относительного перемещения и доступных энергетических ресурсов (особенно для лазерного излучения).
БАП 4, перемещаясь со скоростью vc над сканируемой поверхностью 8 изделия 7, лазерным, ЭМА или иным способом возбуждает в контролируемом изделии 7 УЗ колебания частотой f0 с симметричной диаграммой направленности 9n и 9aw с центральными углами α0n и α0аw с углами раскрытия 2ϕp (Фиг. 2 и 3). В процессе перемещения БАП 4 в зоне локации дефекта 10 (при указанном на Фиг. 2 направлении движения), происходит последовательное озвучивание дефекта 10 вначале - наезжающим лепестком ДН 9n (come near) БАП 4, впоследствии - отъезжающим лепестком 9aw (move away). При этом, в соответствии с выражениями (2), (1) и (3), меняется частота эхо-сигнала. Причем при озвучивании наезжающим лепестком ДН частота эхо-сигнала больше частоты излучения f0 и меняется в пределах эхо-сигналов от fn.s (start) до fn.e (end).
Через определенное время, равное τd, дефект 10 озвучивается отъезжающим лепестком ДН 9aw, и, частота сигнала, в соответствии с (1) и (2), будет меньше частоты излучения f0. В процессе движения БАП 4 со скоростью сканирования vc мгновенная частота эхо-сигналов, озвучиваемых отъезжающим лепестком, изменяется от faw.s до fаw.е (Фиг. 2б).
Таким образом, в процессе озвучивания дефекта 10 двухлучевой симметричной ДН (9n и 9aw) БАП 4 формируются две группы (пачки) эхо-сигналов с отличающимися частотами заполнения.
Изменения частот УЗ эхо-сигналов (Фиг. 2) в пределах основных лепестков ДН 9 является одним из характерных признаков, учет которых позволяет достоверно выделять полезные сигналы от дефектов на фоне разнообразных помех.
К примеру, для реальных значений углов ввода (α0=30°) при ЭМА возбуждении/приеме УЗ колебаний, частоты излучения f0=2,5 МГц и половины ширины диаграммы направленности (ϕp=10°), при практически реализуемых скоростях сканирования (vc=25 м/с=90 км/ч) и скорости распространения УЗ колебаний в контролируемом изделии (с=3260 м/с), величина ΔfЭ, в соответствии с выражением (5), составляет около 11,43 кГц. Т.е. девиация частот заполнения импульсов в пачке составляет почти 60% от среднего значения доплеровского сдвига Fд (около 20,0 кГц), что вполне достаточно для практического учета ее с целью повышения достоверности контроля.
Зоны локации (приема) ΔL пачек этих сигналов определяются шириной основных лепестков ДН, а длительности х зависят от скорости сканирования (Фиг. 2):

Измеряя временное расстояние τd между центрами этих двух пачек сигналов, из геометрических соображений можно оценить и глубину залегания h дефекта 10 (Фиг. 2):

Отметим принципиальные отличия значений координат дефектов, определяемых предлагаемым способом по выражению (7), и традиционным способом при импульсном излучении (рис. 3.11 [17]), путем измерения времени пробега УЗ колебаний до дефекта и обратно. При традиционном вычислении глубины залегания определяется время пробега УЗ колебаний до отражающей точки (плоскости) дефекта и обратно к преобразователю. При предлагаемом способе оценивается местоположение центра дефекта (геометрическое место последовательного пересечения осей ДН в области нахождения дефекта).
В большинстве случаев, особенно при обнаружении локальных дефектов малых размеров, эти величины примерно равны (в пределах погрешности измерений). Но при обнаружении дефектов значительных размеров значения h дефекта, определяемые рассматриваемыми способами, могут заметно отличаться. С точки зрения проведения ремонтных работ предпочтительнее информация о координате центра дефекта, получаемая предлагаемым способом, чем координаты двух отражающих точек поверхностей дефекта. В любом случае, дополнение традиционных данных о дефекте новой информацией о координате центра дефекта дополнительно повышает достоверность контроля изделия.
Если представить диаграмму направленности БАП 4 в декартовой системе координат (Фиг. 3а) и отобразить частотный спектр эхо-сигналов (Фиг. 3б), соотнесенных к угловым параметрам ДН, то четко видно, что спектры ожидаемых сигналов от дефектов на частотной оси сосредоточены симметрично относительно изучаемой частоты f0 с центральными частотами (f0+FД) и (f0-FД). Эффективная ширина каждой пачки сигналов Δfn=(fn.s-fn.e) и Δfaw=(faw.s-faw.e) определяется шириной 2ϕр соответствующего лепестка ДН (Фиг. 3). Как правило, при бесконтактном возбуждении УЗ колебаний Δfn=Δfaw.
Двумя полосовыми фильтрами (на Фиг. не показан), полосами пропускания ΔfЭ, определяемой выражением (5), и центральными частотами (f0+FД) и (f0-FД), можно выделить все ожидаемые сигналы от потенциальных дефектов. По закону изменения (девиации) мгновенных частот сигналов можно производить выделение УЗ эхо-сигналов от внутренних дефектов на фоне возможных помех. При преобразовании сигналов в цифровой вид все эти операции выполняются в вычислителе 2 (Фиг. 1).
Интересным фактом, дополнительно подтверждающим изложенные выше выводы о разнонаправленной девиации частоты заполнения сигналов в процессе озвучивания внутреннего дефекта БАП с симметричной двухлучевой ДН, является идентичность представленных на Фиг. 4 закономерностей частотного (Фиг. 4а) и временного (Фиг. 4в) поведения эхо-сигналов при сканировании. Изменения мгновенных частот эхо-сигналов, вследствие проявления эффекта Доплера, при озвучивании наезжающим лепестком ДН в течение длительности пачки τn происходят от максимально значения к минимальному (на Фиг. 4а стрелкой показано направление уменьшения доплеровского сдвига частоты). Через определенное время, примерно равное времени τd, озвучивание дефекта происходит отъезжающим лепестком ДН и модуль частоты Доплера мгновенных частот эхо-сигналов в пачке (длительностью τaw) растет от минимального до максимального значений, определяемых выражениями (1) и (2).
Аналогичная зависимость, теперь уже во временной области, происходит и при озвучивании дефекта контактными наклонными пьезопреобразователями (НЭП) по- и против направления сканирования (Фиг. 4б) (см. например, рис. 3.17 [17], рис. 3.4 и 3.10 [18]). При этом используют два идентичных, но разнонаправленных ПЭП с одинаковыми ДН. На традиционной дефектограмме с отображением сигналов на развертке типа В (на координатной плоскости «время распространения УЗ колебаний - время перемещения ПЭП» (или при наличии одометра - путь сканирования)), обычно на общей дорожке регистрации отображаются две наклонные линии (или группы точек отображающих эхо-сигналы на В-развертке). Эти две линии с уменьшающимся (относительно зондирующего импульса) временем задержки эхо-сигналов для наезжающих ПЭП, и увеличивающимся временем задержки для отъезжающих ПЭП, уже много лет является основным признаком наличия дефектов в контролируемом изделии [18].
Своеобразная девиация частоты УЗ эхо-сигналов от дефектов в процессе сканирования характерна как для специфического и весьма редкого в дефектоскопии непрерывного излучения, так и для традиционного импульсного (Фиг. 2б) излучения УЗ колебаний.
При импульсном УЗ излучении в зоне локации ΔLn (Фиг. 1) в процессе сканирования от дефекта 10 принимается группа (пачка) эхо-импульсов (Фиг. 2б) [10]. Эти импульсы формируются последовательно в процессе озвучивания отражателя. Традиционно длительность одиночного эхо-импульса составляет всего лишь единицы мкс (около 10-12 периодов УЗ частоты), что значительно меньше одного периода доплеровской частоты. Поэтому девиацию частоты, вызванную переменой угла локации дефекта по мере сканирования, предлагается оценить по результатам определения мгновенных частот эхо-импульсов в пачке.
В отличие от технических решений [4-8], использующих непрерывное излучение УЗ колебаний, переход к импульсному излучению с выделением доплеровской частоты эхо-сигналов позволяет существенно облегчить процесс определения глубин залегания искомых дефектов традиционным способом (по временной задержке эхо-импульсов относительно зондирующего импульса).
Известны различные способы определения эффективной (мгновенной) частоты недетектированного радиочастотного эхо-сигнала. В частности, в соответствии с [19], эффективную частоту определяют по максимуму частотного спектра эхо-сигнала с использованием оконного преобразования Фурье. Однако этот способ обладает низкой помехоустойчивостью.
Наиболее практично определение эффективной частоты можно выполнить известным способом [20], предлагающим алгоритм оценки мгновенной частоты недетектированного радиочастотного эхо-сигнала на основе применения вейвлетного преобразования. При этом в пределах длительности радиоимпульса (эхо-сигнала) выбирают некоторое временное окно шириной, сравнимой периодом несущей частоты. Целесообразно выбрать временное окно в зоне эхо-импульса, соответствующей максимуму амплитуды. Вейв-летная функция - это функция двух переменных, локализованная по времени и частоте, из которой путем растяжения и сжатия по временной оси можно получить базис для анализа функций. Суть вейвлет-анализа состоит в разложении анализируемого сигнала по базисным функциям с последующей визуализацией распределения частоты исследуемого процесса во временной или частотной области.
Все преобразования вейвлет-анализа производятся в вычислителе 2 дефектоскопа (Фиг. 1). Определяя мгновенные частоты всех эхо-сигналов, входящих в пачку сигналов от искомого дефекта 10 (Фиг. 2б и Фиг. 4а), можно проследить девиацию частот в пачках эхо-сигналов в процессе сканирования.
Дискретность отсчета частоты эхо-импульсов в пачке сигналов при импульсном излучении УЗ колебаний определяется естественным способом - дискретность соответствует частоте посылок зондирующих импульсов (в частности при реализованной в действующих вагонах-дефектоскопах частоте посылок зондирующих импульсов 4 кГц, отсчет мгновенной частоты происходит через каждые 250 мкс). При непрерывном излучении мгновенные частоты частотно-модулированного эхо-сигнала можно осуществлять с такой же дискретностью или непрерывно (в каждом периоде доплеровской частоты). Выбор дискретности отсчета зависит от желаемой точности отслеживания девиации частоты эхо-сигналов.
Таким образом, и при импульсном излучении УЗ колебаний можно проследить девиацию частоты в принимаемых пачках сигналов от дефектов. По закону изменения (девиации) мгновенных частот сигналов можно осуществить выделение УЗ эхо-сигналов от внутренних дефектов на фоне возможных помех.
Примерами таких помех могут являться отражения от поверхностных микротрещин 11 и 12 (Фиг. 1), не представляющих опасности с точки зрения нарушения прочности контролируемого изделия, при УЗ фиксации которых угол озвучивания остается постоянным.
Известно, что у любой диаграммы направленности 9 имеются и боковые лепестки. И в данном случае, возможные отражения от незначительных повреждений 11 и 12 на поверхности сканирования 2 будут также формировать УЗ эхо-сигналы. Однако так как при этом угол озвучивания относительно нормали не меняется и будет близок к α=±90°, то сигналы от них, хотя и имеют доплеровский сдвиг (причем, максимального значения), но не будут иметь девиацию частоты в процессе сканирования (зона Аn и Aaw на Фиг. 3б).
Аналогично, возможные отражения от противоположной поверхности контролируемого изделия (рельса) принимаемые под углом, близким к α=0°, на частотной оси будут сосредоточены вблизи частоты излучения f0, и у них также будет отсутствовать как доплеровский сдвиг, так и девиация частоты (зона В на фиг. 3б). Только сигналы от внутренних дефектов, озвучиваемые основными лепестками ДН 9n и 9aw с определенными углами раскрытия (2ϕр), будут формировать УЗ эхо-сигналы (Фиг. 2б), частота заполнения которых будет меняться в зависимости от текущего угла озвучивания (Фиг. 3 - зоны Sn и Saw). Таким образом, благодаря отслеживанию девиации частоты УЗ эхо-сигналов появляется возможность выделять сигналы от внутренних дефектов на фоне всевозможных помех. Маловероятно, также, что неизбежные в практике контроля электромагнитные помехи, воздействующие на БАП 4 и попадающие на вход приемника 5, будут иметь ожидаемый при текущей скорости сканирования доплеровский сдвиг и, соответствующую ДН 9 девиацию частоты ΔfЭ.
Подводя итог можно отметить, что при реализации предлагаемого способа бесконтактной УЗ дефектоскопии, в дополнение к имеющимся (амплитуда, время задержки эхо-сигнала относительно зондирующего импульса) используются следующие информативные признаки сигналов от дефектов:
- наличие доплеровского сдвига эхо-сигналов;
- девиация частоты в пределах пачек эхо-сигналов от дефектов;
- разнонаправленное изменение частоты эхо-сигналов в пачках эхо-импульсов, принимаемых наезжающим и отъезжающим лепестками ДН бесконтактного акустического преобразователя;
- координата центра дефекта, определяемая благодаря реализации двухлучевой ДН.
Последние три признака вводятся впервые для дефектоскопии с импульсным излучением УЗ колебаний. Причем, возможность сопоставления координат дефекта определенных традиционным способом (по времени пробега УЗ колебаний), и предлагаемым способом (по интервалу между пачками сигналов, принятых симметричной ДН), дополнительно повышает достоверность обнаружения дефектов при бесконтактном УЗ контроле.
Используемые новые информативные признаки, девиация частоты эхо-сигналов, их направление в зависимости от направления озвучивания дефекта, не коррелированны с амплитудой сигналов, что обеспечивает дополнительное повышение достоверности и точности предлагаемого способа. Результаты, получаемые предлагаемым способом, не зависят от качества контролируемой поверхности 8 и стабильности зазора z между БАП 4 и сканируемой поверхностью 8 (Фиг. 2а), что весьма важно при реализации высокоскоростной ультразвуковой дефектоскопии.
Таким образом, между совокупностью существенных признаков заявляемого способа и достигаемым техническим результатом существует причинно-следственная связь, а именно, определение мгновенных частот эхо-сигналов, принятых в пределах противоположно направленных основных лепестков диаграммы направленности БАП, учет направления их изменения и взаимного временного положения групп эхо-сигналов, принятых указанными лепестками диаграммы направленности, повышает достоверность обнаружения дефектов при бесконтактном УЗ контроле на значительных скоростях сканирования.
Естественно, приведенные конкретные значения скорости относительного движения, углов диаграммы направленности БАП, излучаемой и принимаемых частот сигналов приведены лишь для понимания принципа действия заявляемого технического решения и могут иметь значения в широком диапазоне.
Работоспособность указанных выше предложений проверена путем математического моделирования и экспериментальных исследований и не вызывает сомнений в реализации при высокоскоростном неразрушающем контроле изделий.
Заявляемый способ дефектоскопии может быть использован не только при бесконтактном контроле рельсов, но и при дефектоскопии многих длинномерных изделий: труб, стержней и прутков, буровых штанг, конвейерных лент, контактных проводов электрического тягового состава (электровозов, трамваев и троллейбусов) и др., в том числе, и при контактном способе возбуждения/приема УЗ колебаний.
Таким образом, заявляемый способ может быть реализован, обеспечивает повышение достоверности обнаружения дефектов при значительных скоростях сканирования.
Источники информации:
1. Чабанов В.Е., Жуков В.А. Особенности ультразвукового контроля с применением электромагнитно-акустических преобразователей // В мире НК. 2013 №1 (59), с 36-43.
2. Мужикбаев А.С., Скворцов М.П. Анализ бесконтактных ультразвуковых способов контроля сварных соединений // Актуальные проблемы авиации и космонавтики. - 2015. Том.1. С. 266-268.
3. Патент RU 187834
4. US 3321959.
5. SU 896550.
6. SU 998943.
7. SU 1429013.
8. SU 1527573.
9. US 6324912.
10. Муравьев В.В., Стрижак В.А., Балобанов Е.Н. К расчету параметров системы намагничивания электромагнитно-акустического преобразователя // Измерительная техника, 2011, №1(17), с. 197-205.
11. RU 2680103.
12. RU 2653663.
13. RU 2661312.
14. Буденков Г.А. Возбуждение упругих волн в твердых телах лучом лазера вследствие термоупругого эффекта // Дефектоскопия. 1979. №2. С. 75-81.
15. RU 2381496.
16. Симанчук В.И., Янисов В.В., Генерация ультразвуковых колебаний в твердых телах импульсными пучками заряженных частиц // Дефектоскопия. 1984. №3. С. 30-38.
17. Марков А.А., Кузнецова Е.К. Дефектоскопия рельсов. Формирование и анализ сигналов. Книга 1. Основы. СПб: КультИнформПресс, 2010. - 292 с.
18. Марков А.А., Кузнецова Е.К. Дефектоскопия рельсов. Формирование и анализ сигналов. Книга 2. Расшифровка дефектограмм. - СПб: Ультра Принт, 2014. - 326 с.
19. ГОСТ 26266-90.
20. RU 2524451.
Способ бесконтактной ультразвуковой дефектоскопии с использованием эффекта Доплера, заключающийся в том, что в процессе относительного движения бесконтактного акустического преобразователя и контролируемого изделия на заданной частоте излучают в изделие ультразвуковые колебания с симметричной в плоскости зондирования диаграммой направленности с известными углами, принимают отраженные эхо-сигналы, при известной скорости движения вычисляют доплеровский сдвиг частоты эхо-сигналов, отличающийся тем, что определяют мгновенные частоты эхо-сигналов, принятых в пределах противоположно направленных основных лепестков диаграммы направленности преобразователя, по направлению и величинам их изменения и по взаимному временному положению групп эхо-сигналов, принятых указанными лепестками диаграммы направленности, определяют наличие и положение дефекта.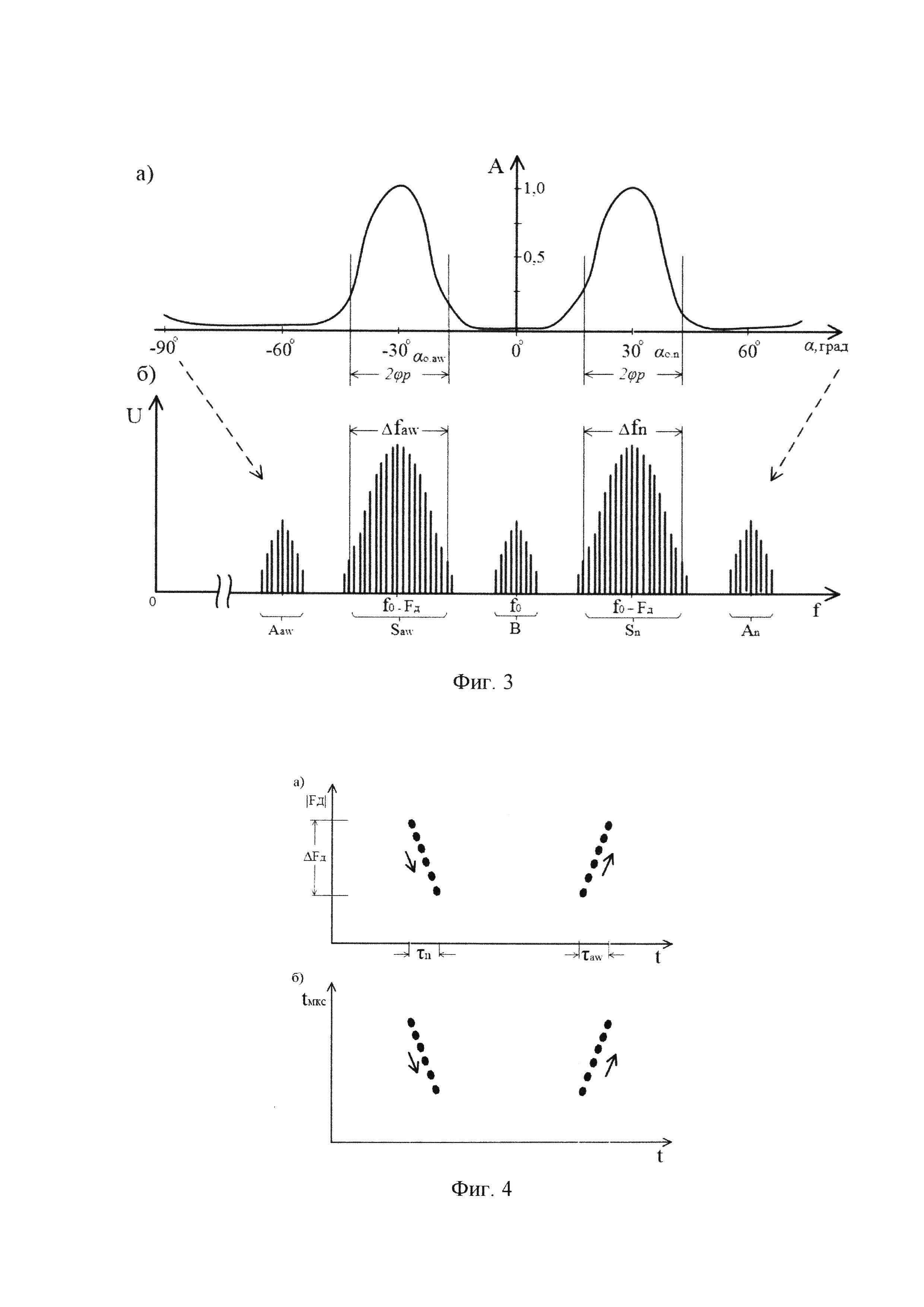
Способ определения стрелочных переводов и положения остряков
Устройство электромагнитно-акустического контроля рельсов
Способ обнаружения дефектов в рельсах
Способ магнитного обнаружения регулярных объектов рельсов
Способ диагностики рельсового пути и синхронизации результатов измерений
Устройство магнитной дефектоскопии ободьев колесной пары
Способ обнаружения и оценки сварных стыков рельсов
Способ прогнозирования развитий аномалий в головке рельсов
Устройство намагничивания для средств неразрушающего контроля длинномерных изделий
Способ определения расстояний между шпалами рельсового пути
Способ диагностики рельсов
Акустический блок дефектоскопа
Способ диагностики рельсового пути
Способ контроля качества сварки
Способ оценки угона рельсовой плети
Устройство отображения рельсового дефектоскопа
Способ магнитного контроля сварных стыков рельсов
Способ настройки чувствительности рельсового ультразвукового дефектоскопа
Способ ультразвукового обнаружения микротрещин на рабочей выкружке головки рельса
Способ ультразвукового контроля изделий

