Результат интеллектуальной деятельности: ОЦЕНКА УСИЛИЯ НА РОБОТОХИРУРГИЧЕСКОМ ИНСТРУМЕНТЕ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к ассистирующим хирургическим комплексам для проведения минимально инвазивных хирургических операций. Более конкретно, изобретение относится к медицинским системам минимального инвазивного вмешательства с устройством для оценки усилия, возникающего на кончике хирургического инструмента при касании им ткани пациента, а также усилий на уровне отверстия доступа хирургического инструмента в тело пациента и иных сил, случайно или ожидаемо действующих в процессе работы на расположенную в теле пациента часть хирургического инструмента.
Предпосылки создания изобретения
Актуальным направлением развития роботохирургии является разработка и внедрение систем обратной связи. Обратная связь – метод, позволяющий определять хирургу количество и качество прикладываемых к тканям воздействий. При проведении классической полостной операции обратной связью для хирурга являются визуальное восприятие происходящего, а также тактильные ощущения, вызываемые прикосновениями к ткани руками или используемым хирургическим инструментом.
Направление развития роботохирургии стремится обеспечить хирургу ощущения, привычные ему из опыта открытой операции: качественный обзор рабочего поля и интуитивно понятное и логичное управление инструментами, - но в условиях использования современных малоинвазивных технологий. Для передачи хирургу тактильных воздействий от соприкосновения с тканями пациента необходимо комплексное решение нескольких задач:
• Создание системы оценки сил, действующих на исполнительный механизм - инструмент;
• Обработка данных о приложенных силах с использованием системы управления;
• Передача обработанных данных о действующих силах хирургу для восприятия, оценки и принятия им решений.
Точная силовая обратная связь (тактильная силовая обратная связь) - важнейший признак, обеспечивающий безопасность и улучшающий качество процедур, выполняемых в течение роботохирургической операции. Задача создания силовой обратной связи является одной из ключевых задач для разработчиков роботохирургических комплексов и решается она с использованием различных подходов.
Возможные подходы к созданию систем обратной связи, их анализ и недостатки подробно изложены в заявке US2018194013 A1, опубликованной 12.07.2018. US2018194013 A1 описывает способ оценки сил, действующих на инструмент роботизированной хирургической системы, который заключается в косвенном контроле, при котором действия сил на кончик инструмента оцениваются/вычисляются через анализ сил, возникающих при этом на другом, противоположном конце инструмента. Для этого по шести степеням свободы измеряются силы, действующие со стороны инструмента на консоль блока крепления инструмента, на котором этот конец инструмента закреплен. Дополнительно рассчитывается расстояние от блока крепления инструмента до троакара, по результатам которого вводятся поправочные коэффициенты при оценке сил. Система силовой обратной связи имеет возможность косвенно оценивать положение кончика инструмента с использованием внешнего по отношению к инструменту тензометрического датчика; измерительные элементы системы расположены в зоне, удаленной от зоны помех электрокоагуляции; а также система имеет возможность рассчитывать и компенсировать силы, возникающие от контакта с троакаром.
Тем не менее, описанная в заявке силовая обратная связь не имеет возможности контролировать силу сжатия браншей хирургического инструмента (одно тактильное ощущение) и не имеет возможности оценивать дополнительные силы, возникающие при соприкосновении инструмента и троакара. Использование тензометрического датчика, обладающего шестью степенями свободы, не позволяет однозначно определить природу измеряемых сил, что снижает эффективность системы. В данной компоновке один и тот же набор сил может быть вызван как контактом с тканями пациента, так и от касания троакара.
Существующие контуры силовой обратной связи для ассистирующих хирургических комплексов не позволяют решить следующую совокупность проблем, что понижает эффективность роботохирургического комплекса в целом:
1. Достаточно достоверно и точно оценивать силы, воздействующие на инструмент при взаимодействии исполнительных поверхностей инструмента и тканей по семи и более осям;
2. Достаточно достоверно и точно выделять и оценивать силы как контролируемые, так и непроизвольно возникающие как результат взаимодействия иных, не исполнительных поверхностей инструмента, с органами и тканями пациента;
3. Достаточно достоверно и точно выделять и оценивать силы, воздействующие на инструмент при контакте с троакаром;
4. Обеспечивать возможность работы в условиях повышенного электромагнитного шума, вызываемого электрокоагуляционными приборами.
Таким образом, существует потребность в усовершенствовании системы оценки сил для использования ее в контуре силовой обратной связи для роботизированного хирургического устройства. Именно решению перечисленных проблем посвящено настоящее изобретение.
Суть изобретения
Технической задачей, на решение которой направлено настоящее изобретение, является достоверное определение источников сил, воздействующих на хирургический инструмент во время работы, по семи и более осям, а также точное измерение этих сил в условиях повышенного электромагнитного шума.
Технический результат настоящего изобретения состоит в разработке медицинской системы минимального инвазивного вмешательства с новой конструкцией и алгоритмом системы оценки сил, действующих на инструмент роботизированной хирургической системы для решения задачи получения данных, необходимых для внедрения системы тактильной обратной связи в режиме реального времени, при этом система оценки сил одновременно удовлетворяет следующим требованиям:
1. Возможность оценки сил, действующих на хирургический инструмент роботизированной хирургической системы, приложенных к любой части его конструкции;
2. Однозначность определения направления и численного значения приложенной к хирургическому инструменту силы;
3. Возможность бесперебойной работы системы оценки сил в условиях использования электрокоагуляции хирургическим инструментом;
4. Возможность измерения силы захвата, возникающей при смыкании браншей хирургического инструмента;
5. Система оценки сил должна минимальным образом влиять на конструкцию используемого инструмента;
6. Обеспечение возможности передачи данных об измеренных силах на внешние системы управления роботохирургическим комплексом;
7. Устойчивость к электромагнитным помехам от бытовой сети;
8. Возможность использования измерительных датчиков различного типа и принципа действия для разных степеней свободы.
Разрабатываемая конструкция и алгоритм системы оценки сил должна точно и дифференцированно по источникам измерять силы воздействия на хирургический инструмент в процессе работы и осуществлять передачу измеренных данных на вышестоящую систему управления.
Решение поставленной задачи и достижение технического результата обеспечивается, прежде всего, новой схемой и структурой системы оценки сил, которая позволяет повысить эффективность и функциональность роботохирургического комплекса.
Предлагаемая система согласно настоящему изобретению предназначена для измерения сил, воздействующих на инструмент в процессе проведения роботохирургической операции, и передачи информации, содержащей результаты измерений. Система является составной частью исполнительного механизма робот-ассистированного хирургического комплекса и реализует функционал измерения для реализации комплексом тактильной обратной связи. Система оценки сил, используемая в контуре силовой обратной связи, должна обладать следующими функциями:
• Измерение данных прикладываемых к инструменту сил с использованием нескольких многоосевых тензометрических датчиков;
• Первичная обработка данных о прикладываемых силах с обеспечением условия ограничения частотных характеристик сигналов с целью уменьшения измерительных шумов и подавления влияния электромагнитных наводок;
• Передача обработанных данных в режиме реального времени на вышестоящую систему управления с использованием проводного или беспроводного интерфейса связи.
Более конкретно, техническая задача и технический результат достигаются за счет того, что медицинская система минимального инвазивного вмешательства включает манипулятор, имеющий опору, сконфигурированную для закрепления троакара и для закрепления привода хирургического инструмента минимального инвазивного вмешательства, а также систему оценки сил, воздействующих на инструмент в течение хирургической операции, причем система оценки сил включает трехосевой нижний тензометрический датчик, расположенный на опоре манипулятора в месте закрепления троакара и находящийся в непосредственном контакте с ним, для измерения сил, приложенных к инструменту и направленных вдоль осей х и у, трехосевой верхний тензометрический датчик, расположенный на опоре манипулятора под приводом хирургического инструмента, для измерения силы, приложенной к инструменту и направленной вдоль оси z, датчик усилия захвата исполнительных поверхностей инструмента, выполненный в виде датчика силы тока для электродвигателя привода инструмента, обеспечивающего сжатие исполнительных поверхностей инструмента, датчик момента вращения хирургического инструмента, выполненный в виде датчика силы тока для электродвигателя привода инструмента, обеспечивающего вращение хирургического инструмента вокруг его продольной оси, причем тензометрические датчики соединены с соответствующими модулями цифровой обработки данных, причем датчик усилия захвата и датчик момента вращения соединены с соответствующими системами управления электродвигателем, модули цифровой обработки и системы управления электродвигателями соединены с модулем обработки, который запрограммирован для осуществления вычисления посредством групповой обработки и синхронизации сигналов от тензометрических датчиков, датчика момента вращения и датчика усилия захвата: сил, направленных вдоль линейных осей, вращательных моментов инструмента вдоль осей х и у относительно точки ввода троакара в тело пациента, вращательного момента инструмента вдоль оси z относительно точки ввода троакара в тело пациента, усилия сжатия исполнительных поверхностей инструмента, при этом каждый модуль цифровой обработки запрограммирован для использования цифрового фильтра нижних частот и алгоритма полосно-заграждающего фильтра для данных усилия, измеренных тензометрическим датчиком, а модуль обработки запрограммирован для компенсации силы тяжести, действующей на опору манипулятора и инструмента, компенсации сил, вызываемых сопротивлением троакара движению инструмента, и компенсации динамических характеристик элементов, размещенных на оси вращения электродвигателей, модуль обработки выполнен с возможностью передачи данных на систему управления роботохирургическим комплексом.
В некоторых вариантах осуществления изобретения медицинская система характеризуется тем, что модули цифровой обработки и системы управления электродвигателями соединены с модулем обработки посредством шины данных, которая представляет проводное или беспроводное соединение.
В некоторых вариантах осуществления изобретения медицинская система характеризуется тем, что что модули цифровой обработки расположены возле тензометрических датчиков.
Система оценки сил, входящая в контур силовой обратной связи роботохирургического комплекса, решает задачу и достигает технический результат благодаря наличию в составе следующих признаков:
1. Введение как минимум двух точек контроля сил, действующих на инструмент, при этом в каждой точке используются датчики силы.
2. Расположение датчиков силы относительно друг друга таким образом, чтобы получить максимально полную и достоверную информацию, что в итоге повышает точность и упрощает и, как следствие, сокращает время расчетов.
3. Расположение одного из датчиков силы непосредственно в месте крепления троакара.
4. Понижение требований к датчикам силы и замена 6-DOF датчиков на датчики 3-DOF как следствие смены схемы измерения, что значительно удешевляет конструкцию, но при этом повышает надежность и достоверность измерения.
5. Использование датчика силы тока, измеряющего усилия смыкания браншей.
6. Использование датчика силы тока, измеряющего вращательный момент поворота инструмента вокруг продольной оси.
Краткое описание чертежей
Прилагаемые чертежи, которые включены в состав настоящего описания и являются его частью, иллюстрируют варианты осуществления изобретения и совместно с вышеприведенным общим описанием изобретения и нижеприведенным подробным описанием вариантов его осуществления служат для пояснения принципов настоящего изобретения.
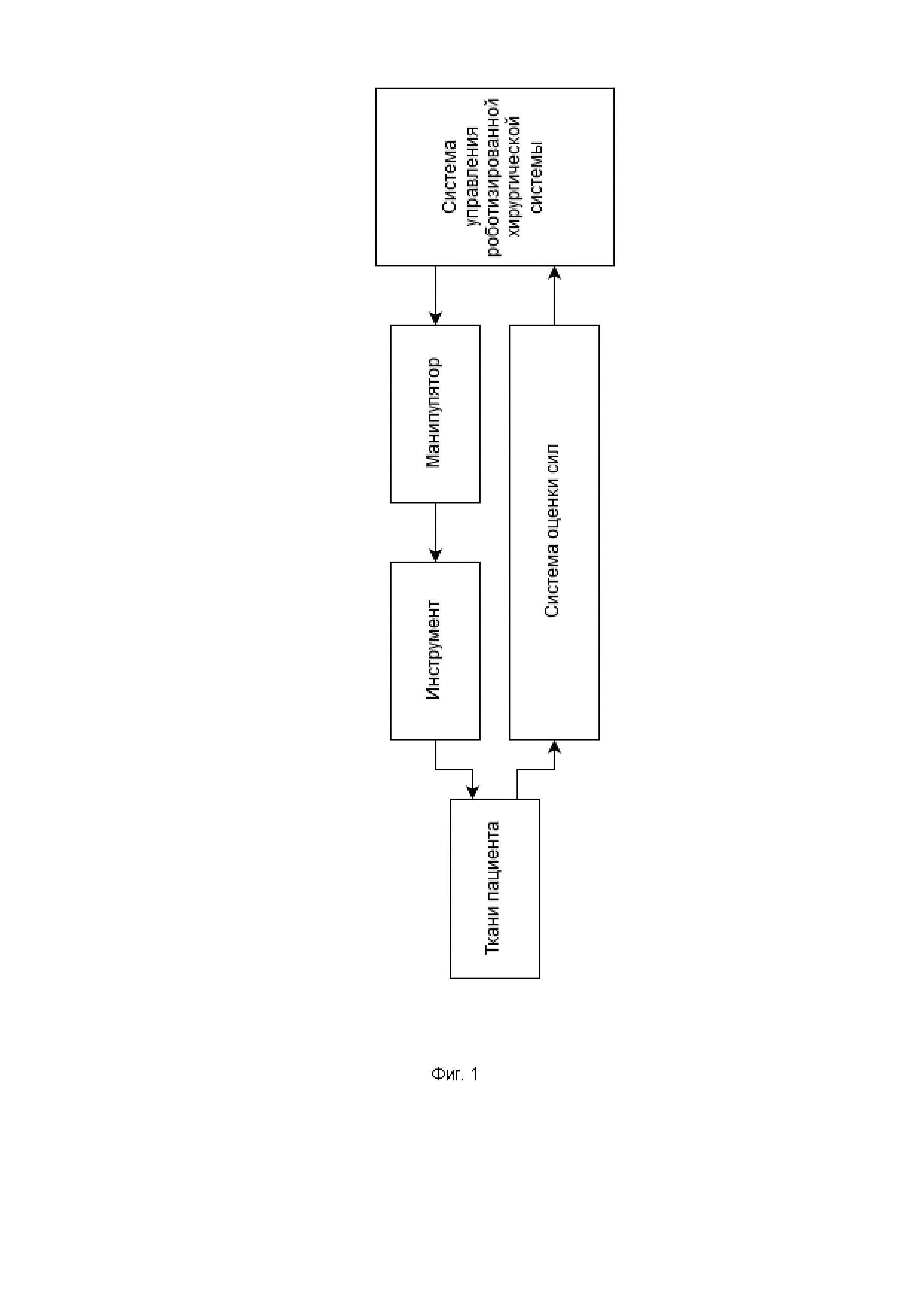
Фиг. 1 изображает структурную схему реализации системы силовой обратной связи, интегрированную в робот-ассистирующий хирургический комплекс.
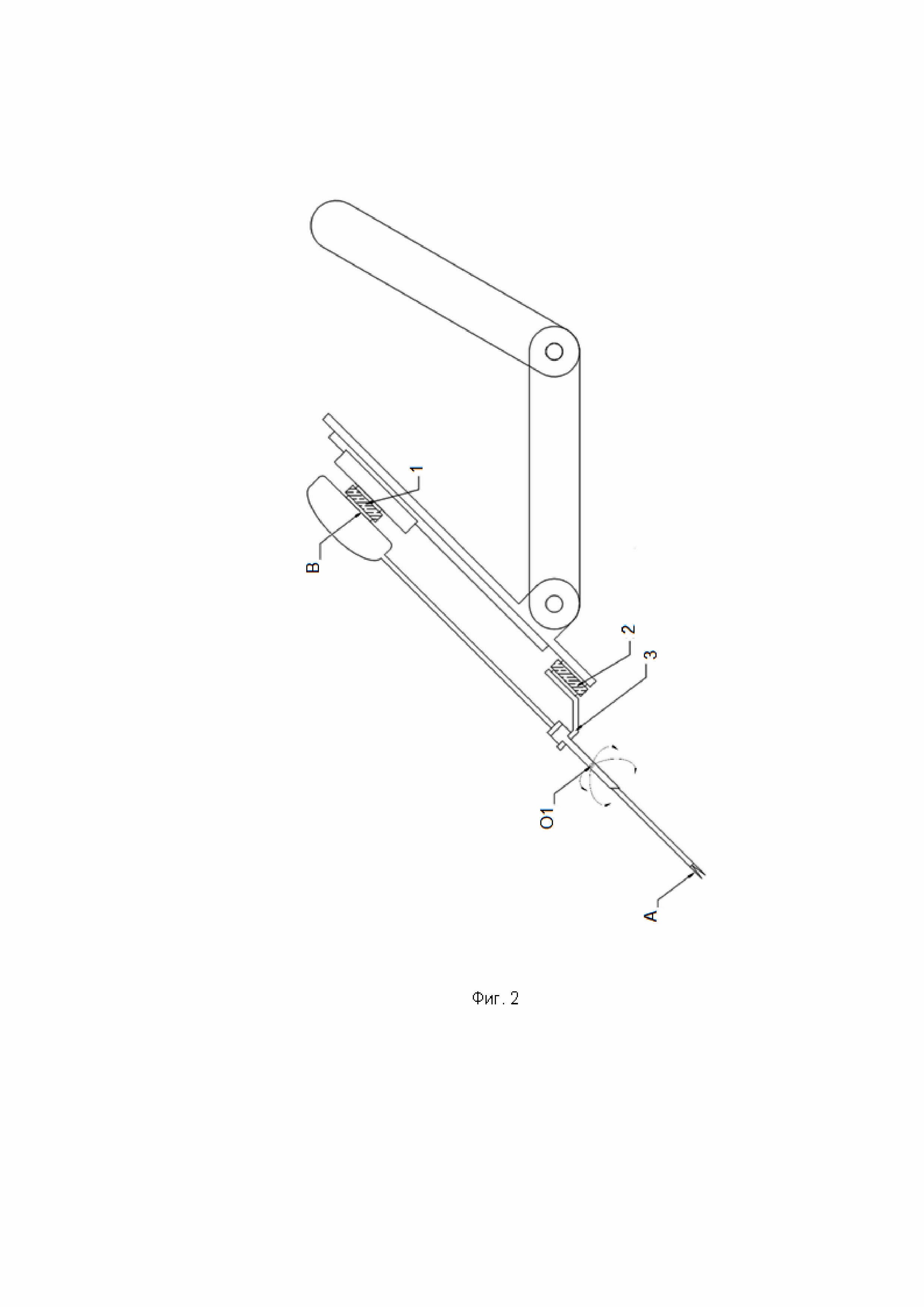
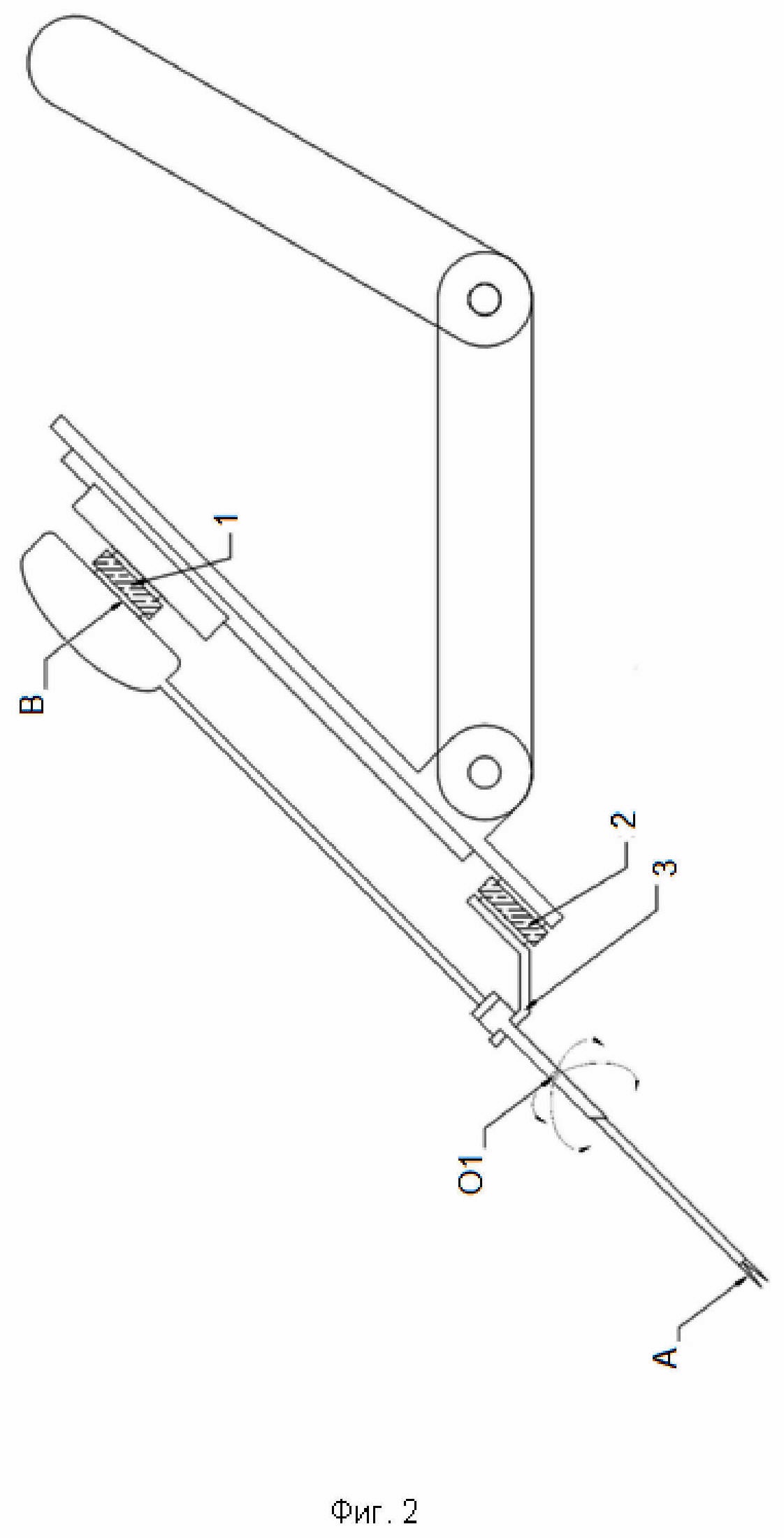
Фиг. 2 иллюстрирует схематическое изображение хирургического инструмента, расположенного на опоре, закрепленной на манипуляторе.
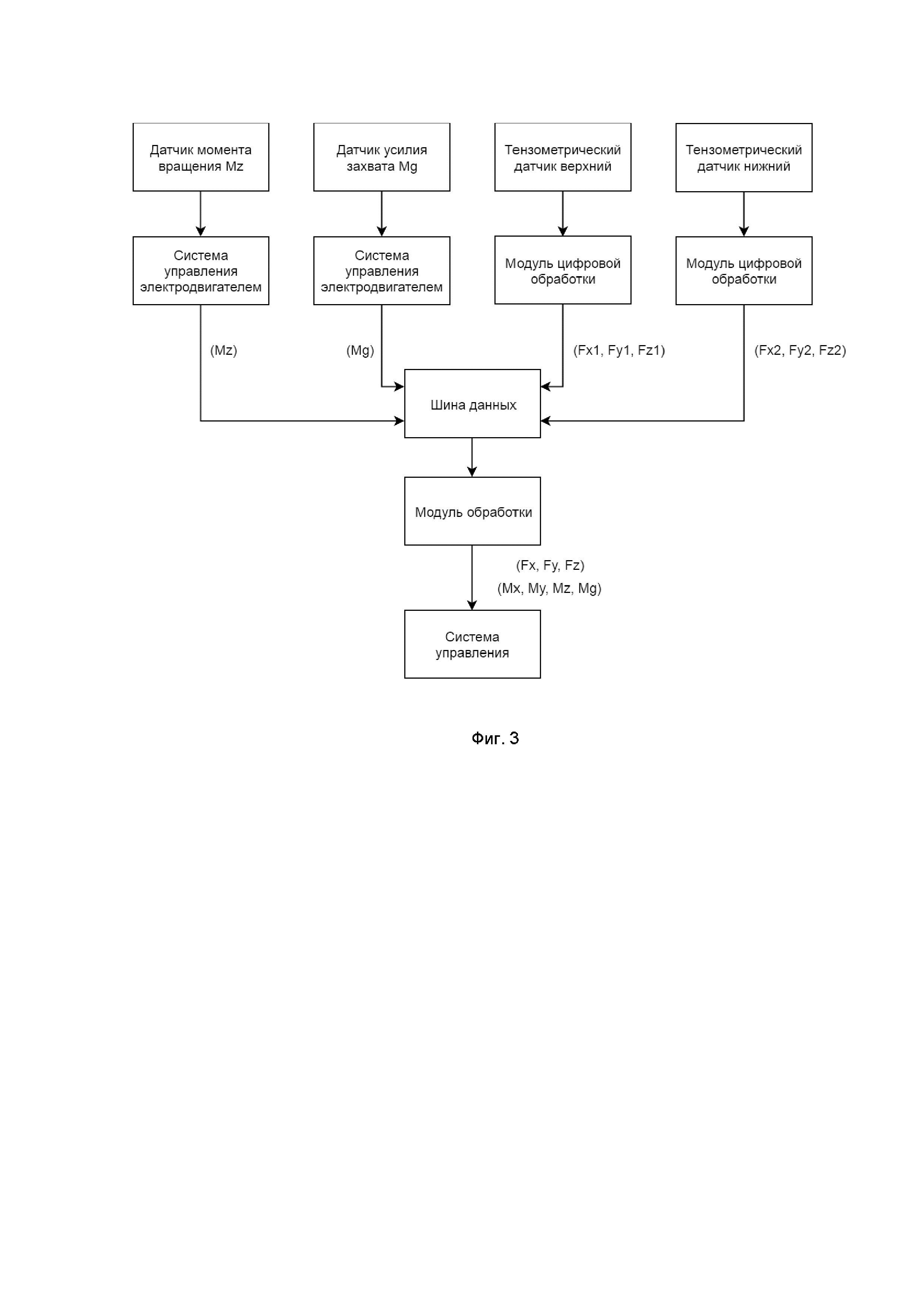
Фиг.3 изображает архитектуру системы оценки сил.
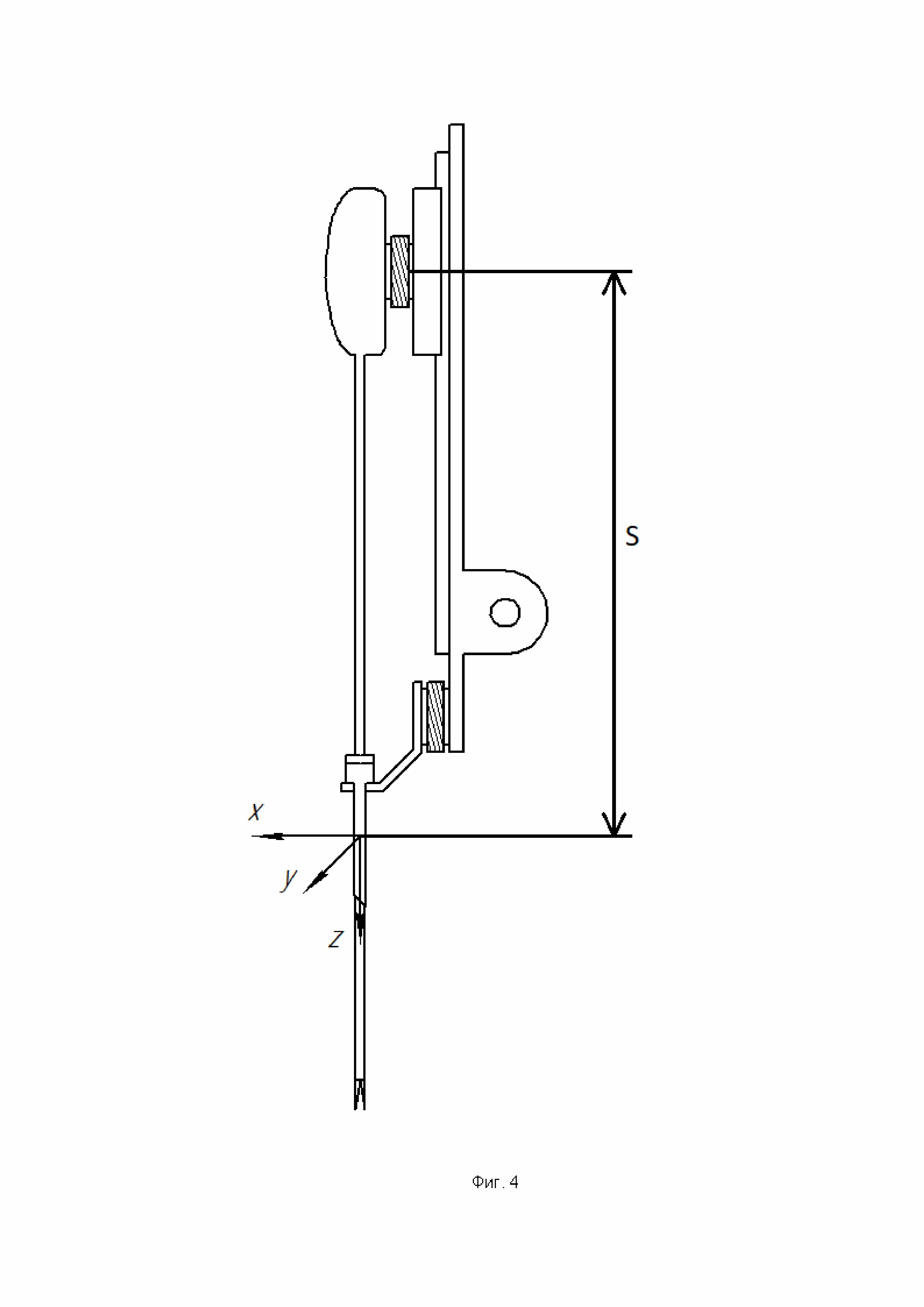
Фиг. 4 иллюстрирует хирургический инструмент и тензометрические датчики по отношению к декартовой системе координат.
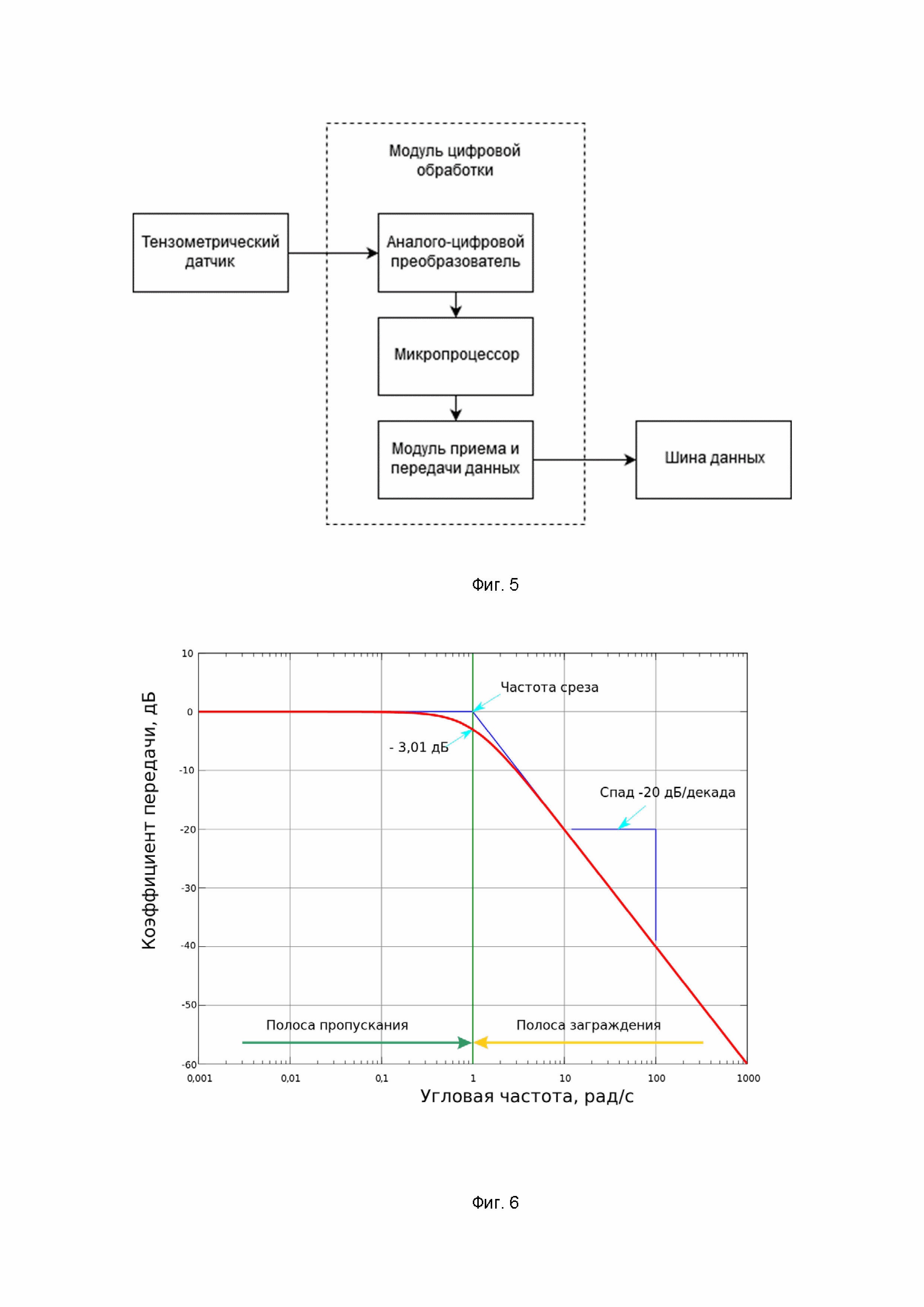
Фиг. 5 иллюстрирует структурную схему модуля цифровой обработки.
Фиг. 6 представляет амплитудно-частотную характеристику фильтра нижних частот модуля цифровой обработки.
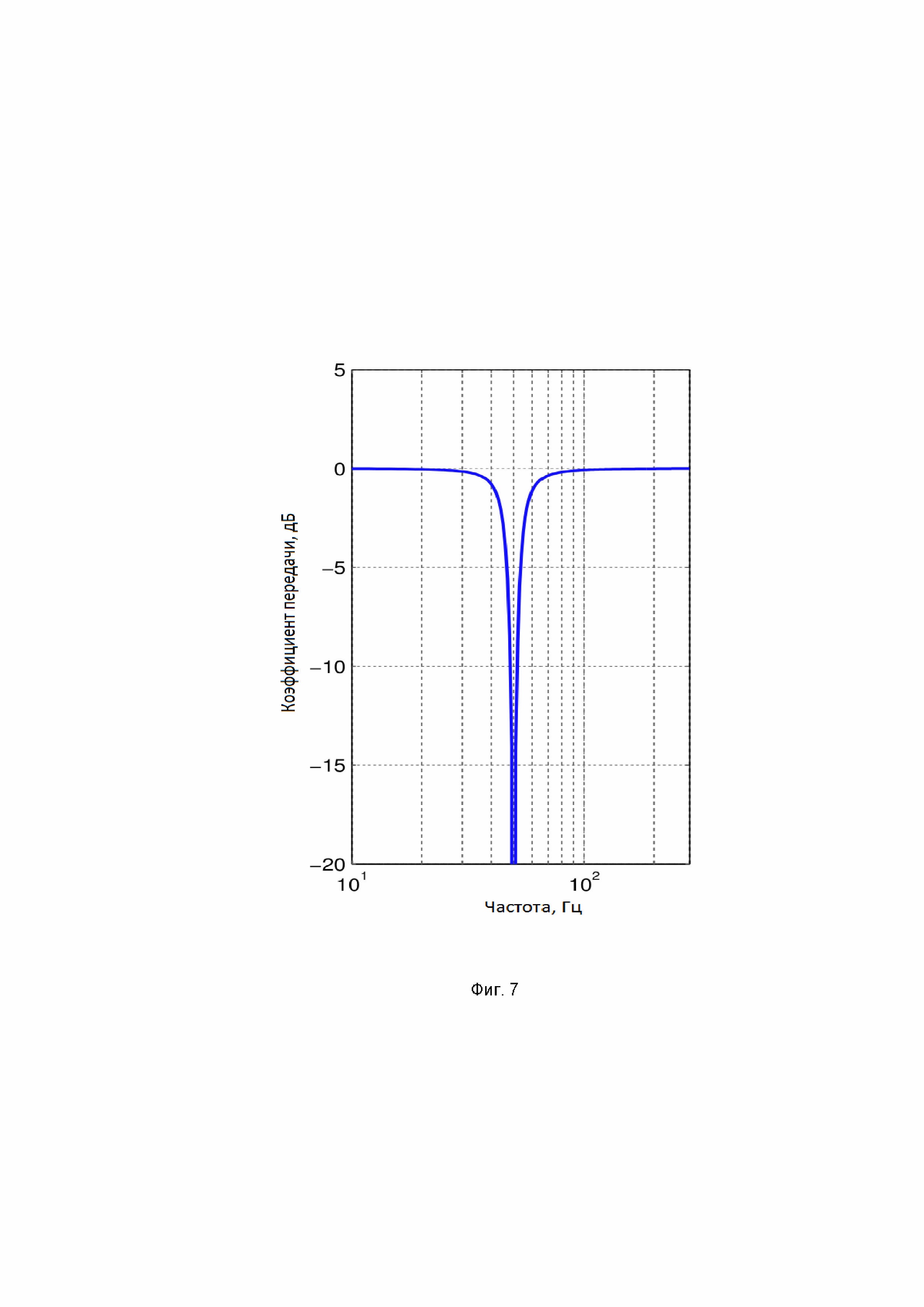
Фиг. 7 представляет амплитудно-частотную характеристику полосно-заграждающего (режекторного) фильтра.
Фиг. 8 иллюстрирует структурную схему для измерения тока, потребляемого двигателем.
Фиг. 9 схематически изображает визуализацию работы алгоритма синхронизации.
Термины и определения
Для лучшего понимания настоящего изобретения ниже приведены некоторые термины, использованные в настоящем описании изобретения. Если не определено отдельно, технические и научные термины в данной заявке имеют стандартные значения, общепринятые в научной и технической литературе.
В настоящем описании и в формуле изобретения термины «включает», «включающий» и «включает в себя», «имеющий», «снабженный», «содержащий» и другие их грамматические формы не предназначены для истолкования в исключительном смысле, а, напротив, используются в неисключительном смысле (т.е., в смысле «имеющий в своем составе»). В качестве исчерпывающего перечня следует рассматривать только выражения типа «состоящий из».
В настоящих материалах заявки под терминами «роботизированный технологический комплекс», «роботизированная система», «роботизированный комплекс», «роботохирургический комплекс», «роботохирургическая система» понимают сложные системы или комплексы в хирургии с использованием робота-ассистента во время операции. «Робот-ассистивные системы» или «робот-ассистированные хирургические системы» - это роботизированные системы, предназначенные для проведения медицинских операций. Это не автономные устройства, робот-ассистивными системами при проведении операции управляют хирурги.
В настоящих материалах заявки под термином «мехатронный комплекс» или «мехатронная система» понимают комплекс или систему с компьютерным управлением движения, которые базируются на знаниях в области механики, электроники и микропроцессорной техники, информатики и компьютерного управления движением машин и агрегатов.
В настоящей заявке под термином «оператор» понимают производящего операции врача-хирурга. Признаки «оператор» и «хирург» в настоящем описании изобретения являются синонимами.
В настоящих материалах заявки под термином «манипулятор» понимают мехатронный механизм, предназначенный для закрепления и перемещения (изменения положения) хирургического инструмента во время выполнения хирургической операции в соответствии с заданными командами от системы управления роботохирургического комплекса.
В настоящей заявке под термином «хирургический инструмент», «инструмент» понимают специальный инструмент небольшого размера, который закрепляют в хирургическом роботе для проведения операций. Во время хирургической операции инструменты могут перемещаться, поворачиваться и вращаться в гораздо большем диапазоне и гораздо точнее, чем человеческая рука. В зависимости от типа операции используется соответствующий инструмент, который позволяет ее выполнить наиболее эффективно. Миниатюрный роботохирургический инструмент производит рассечение тканей, перемещение тканей, зажим, наложение швов и прочее, что позволяет работать с труднодоступными участками органов без риска повреждения здоровых тканей.
В настоящей заявке под признаком «исполнительные поверхности инструмента», «исполнительная часть инструмента» понимают поверхности инструмента или часть инструмента, с помощью которых инструмент выполняет свое служебное назначение. Как правило, исполнительные поверхности, например, бранши, расположены на конце вводимого в тело пациента инструмента и совершают сложные движения, инициируемые и контролируемые хирургом.
Термин «соединенный» означает функционально соединенный, при этом может быть использовано любое количество или комбинация промежуточных элементов между соединяемыми компонентами (включая отсутствие промежуточных элементов).
Кроме того, термины «первый», «второй», «третий» и т.д. используются просто как условные маркеры, не накладывая каких-либо численных или иных ограничений на перечисляемые объекты.
Подробное описание изобретения
Описание примерных вариантов осуществления настоящего изобретения, приведенное ниже, приводится исключительно в качестве примера и предназначено для иллюстративных целей и не предназначено для ограничения объема раскрываемого изобретения.
Настоящее решение относится в целом к интегрированной системе оценке сил в контуре силовой обратной связи, которая является составной частью системы управления ассистирующим хирургическим комплексом. В частности, настоящее решение направлено на создание системы оценки сил воздействия на ткани и органы пациента инструментом в процессе роботохиругической операции. Использование такой системы позволяет реализовать тактильные ощущения для хирурга от контакта поверхностей инструмента с тканями пациента, не создавая ощущений от контакта инструмента с троакаром, которые вынужденно возникают в виде трения и различных боковых сил при перемещении инструмента в троакаре во время работы.
Система имеет прямые или косвенные механические связи с тканями пациента и аппаратный проводной или беспроводной интерфейс для обмена данными с системой управления роботизированной хирургической системы. Необходимые связи для реализации системы отражены на структурной схеме, приведенной на фиг. 1.
На структурной схеме отображено, что контур «Система управления роботизированной хирургической системы – Манипулятор – Инструмент - Ткани пациента» представляет собой прямой способ передачи планируемых воздействий от системы управления к пациенту. Контур «Ткани пациента – Система оценки сил – Система управления роботизированной хирургической системы» является обратным и служит для контроля фактического, прикладываемого к пациенту воздействия.
Инструмент роботизированной хирургической системы является сложным устройством, к которому предъявляются высокие требования по применяемым материалам, температурным диапазонам и герметичности, что вызвано необходимостью его стерилизации. Системы оценки сил, элементы которых интегрированы непосредственно в инструмент, как правило, обладают сложной конструкцией, могут требовать периодической калибровки и подвержены помехам от систем электрокоагуляции, широко применяемой при малоинвазивных роботизированных хирургических вмешательствах.
Следует отметить, что силы обратной связи воздействуют не только непосредственно на хирургический инструмент, но и, через него, на элементы конструкции крепления инструмента и троакар, который обеспечивает доступ в оперируемую область.
Предлагаемое согласно настоящему изобретению решение представляет собой конструкцию крепления инструмента, находящуюся на манипуляторе робот-ассистирующего хирургического комплекса, позволяющую обеспечить измерение сил, действующих на находящиеся на кончике инструмента рабочие поверхности, в контуре обратной связи.
На фиг. 2 приведено схематическое изображение конструкции крепления хирургического инструмента. Конструкция крепления представляет опору, сконфигурированную для расположения и закрепления на ней троакара и закрепления инструмента путем закрепления привода инструмента. Для точного позиционирования инструмента в конструкции крепления используется держатель троакара. На фиг. 2 цифрами обозначены следующие конструктивные элементы: 1 – трехосевой тензометрический датчик (верхний тензометрический датчик); 2 – трехосевой тензометрический датчик (нижний тензометрический датчик); 3 – держатель троакара. Принятые обозначения на фиг. 2: О1- точка ввода троакара в тело пациента, вокруг которой осуществляются два поворота введенного в троакар инструмента во время операции (нулевая точка), точка находится внутри троакара; А – положение конца хирургического инструмента, который вводится в тело пациента; В – положение противоположного конца хирургического инструмента, установленного в привод хирургического инструмента. Углы ориентации (углы вращения) хирургического инструмента в горизонтальной плоскости и наклона рассматриваются относительного точки вращения (нулевая точка). Нулевая точка O1 определяется как начало отсчета.
Механическое взаимодействие элементов инструмента, конструкции крепления хирургического инструмента и элементов манипулятора реализуется через два многоосевых тензометрических датчика, один из которых расположен на одном конце инструмента под приводом инструмента, а другой – в месте закрепления троакара. Расположение тензометрических датчиков представлено на фиг. 2.
Такое расположение тензометрических датчиков обладает следующими преимуществами:
• Физическое отдаление чувствительных элементов датчиков от зоны помех электрокоагуляции;
• Предоставляет возможность использования различных инструментов без изменения их конструкции;
• Позволяет производить оценку сил по нескольким степеням свободы.
В качестве многоосевых тензометрических датчиков могут быть применены датчики изгиба на основе тензорезисторов, емкостные датчики деформации или датчики любого иного принципа действия, позволяющие произвести измерение приложенного к ним усилия.
В предпочтительном варианте осуществления изобретения в качестве тензометрических датчиков могут быть использованы датчики деформации с чувствительным элементом в виде тензорезистора. Датчики такого типа обладают высоким выходным сопротивлением, а сигнал имеет малую мощность, что ограничивает его распространение в пространстве.
Конструкция позволяет реализовать следующие возможности:
• Производить оценку сил, действующих на инструмент как минимум в пяти степенях свободы с использованием двух трехосевых тензометрических датчиков (три линейные степени свободы вдоль осей х, у, z и вращательные моменты вокруг осей x и y);
• Производить оценку усилия захвата (усилия сжатия), контролируя одну степень свободы (степень свободы при захвате, сжатии исполнительных поверхностей хирургического инструмента);
• Производить оценку вращательной/скручивающей силы, действующей на инструмент (три вращательные степени свободы вокруг осей х, у, z);
• При оценке сил учитывать силы, возникающие в месте контакта троакара с телом пациента;
• Обеспечивать достаточную достоверность данных об усилиях в условиях электромагнитных помех, создаваемых электрокоагуляцией.
Во время работы исполнительные поверхности, расположенные на конце инструмента, введенного в тело пациента (исполнительная часть инструмента), совершают сложные движения, инициируемые и контролируемые хирургом. При возникновении сопротивления движению исполнительной части инструмента или при соприкосновении частей инструмента с тканью пациента возникает изгиб чувствительного элемента тензометрического датчика по соответствующей оси. Так как инструмент, располагаясь в конструкции крепления хирургического инструмента, контактирует с манипулятором в двух точках, одной из которых является зона расположения троакара, а другая – зона расположения привода хирургического инструмента, то выполняется измерение усилий в обоих точках и дальнейшая совместная обработка данных сигналов.
Выходы тензометрических датчиков подключены непосредственно к модулям цифровой обработки, которые производят усиление сигналов и их перевод в цифровую форму. Модули цифровой обработки могут быть расположены непосредственно возле тензометрических датчиков. Указанное расположение не является обязательным и может быть изменено при необходимости, например, при использовании тензометрических датчиков с платой усиления сигнала. Однако, расположение модуля цифровой обработки сигналов тензометрических датчиков в непосредственной близости к каждому используемому тензометрическому датчику является предпочтительным, так как обеспечивается высокое отношение сигнал-шум и устойчивость к внешним электромагнитным возмущениям.
Для измерения силы захвата/сжатия на исполнительных поверхностях хирургического инструмента, например, браншей, могут быть использованы датчики силы тока для двигателей, реализующих захват/сжатие. Принцип измерения усилия сжатия заключается в увеличении потребления тока двигателями при возникновении сопротивления движению захватывающих элементов конструкции инструмента. Двигатели, реализующие сжатие, являются частью привода хирургического инструмента.
Для измерения вращательного момента вокруг оси z может быть применен датчик тока электродвигателя, обеспечивающего вращения вокруг данной оси. Принцип измерения вращательного момента заключается в увеличении потребляемого электродвигателем тока при возникновении сопротивления движению. Двигатели, реализующие вращение вокруг оси z, являются частью привода хирургического инструмента.
В предпочтительном варианте осуществления изобретения в качестве двигателей используют электрические двигатели (электродвигатели). Каждый из датчиков тока двигателей привода хирургического инструмента может быть соединен с системой управления электродвигателем.
Модули цифровой обработки и системы управления электродвигателем соединены с модулем обработки за счет шины данных. Шина данных может представлять собой интерфейс RS485, CAN, Bluetooth или какой-либо другой проводной или беспроводной интерфейс передачи данных. Модуль обработки предназначен для групповой обработки и синхронизации сигналов от тензометрических датчиков, датчика вращательного момента и датчика усилия захвата. Использование отдельного устройства в качестве модуля обработки не является обязательным. Он может быть совмещен с каким-либо модулем цифровой обработки или с системой управления. Система управления использует данные, полученные от модуля обработки для дальнейшей организации обратной связи и передачи сигналов хирургу. Архитектура системы оценки сил представлена на фиг. 3.
Ниже приведен один из возможных вариантов осуществления оценки сил, приложенных к инструменту. Инструмент и тензометрические датчики по отношению к рассматриваемой системе координат изображены на фиг.4.
Силы, приложенные к инструменту и направленные вдоль осей x, y, z, будут вызывать деформацию тензометрических датчиков по соответствующим осям. При этом силы, направленные вдоль осей x и y, будут равны показаниям соответствующих осей тензометрического датчика, расположенного возле троакара (нижний тензометрический датчик). Сила, направленная вдоль оси z, будет равна показаниям тензометрического датчика, расположенного возле привода хирургического инструмента (верхний тензометрический датчик) по оси z. Линейные силы по соответствующим осям:
 ,
,
где Fx – сила, направленная вдоль оси x, Fy – сила, направленная вдоль оси y, Fz – сила, направленная вдоль оси z, Fz1 - показания верхнего тензометрического датчика вдоль оси z, Fx2 – показания нижнего тензометрического датчика вдоль оси x, Fy2 - показания нижнего тензометрического датчика вдоль оси y.
Оценка вращательных моментов возможна за счет расположения тензометрического датчика в непосредственном контакте с троакаром (нижний датчик), а второго датчика - на приводе хирургического инструмента (верхний датчик). При этом вращательные моменты будут пропорциональны разности показаний тензометрических датчиков с учетом поправки на длину плеча. За счет этого справедливы следующие выражения:
где Mx – момент вращения вокруг оси x, My – момент вращения вокруг оси y, Fx1 – показания верхнего тензометрического датчика вдоль оси x, Fy1 - показания верхнего тензометрического датчика вдоль оси y, Fx2 – показания нижнего тензометрического датчика вдоль оси x, Fy2 - показания нижнего тензометрического датчика вдоль оси y, S – расстояние от нулевой точки до места контакта привода хирургического инструмента с тензометрическим датчиком.
Для оценки вращательного момента вокруг оси z, а также оценки усилия захвата, необходимо произвести измерение силы тока, потребляемого двигателями, обеспечивающими вращение вокруг оси z и перемещение браншей инструмента во время захвата/сжатия. В предпочтительном варианте осуществления в качестве двигателей используются электрические двигатели (электродвигатели). Как правило, для электрических двигателей зависимость потребляемого тока от приложенной к нему нагрузки близка к линейной, за исключением динамических характеристик, размещенных на оси вращения элементов.
 ,
,
где MRz – вращательный момент вокруг оси z, Iz –потребляемый двигателем оси rz ток, kz – коэффициент перевода тока во вращательный момент для двигателя оси rz, MG – вращательный момент сопротивления захвату, IG – потребляемый двигателем оси захвата ток, kg – коэффициент перевода силы тока в усилие для двигателя оси захвата.
Приведенные выражения не являются единственно возможным вариантом осуществления оценки сил, приложенных к инструменту, но они являются достаточными для получения достоверных данных, необходимых для работы системы обратной связи в составе роботохирургического комплекса.
При разработке архитектуры системы были учтены предъявляемые к системе требования, а также особенности передачи аналоговых и цифровых сигналов в системах реального времени.
Для более точной обработки данных тензометрических датчиков и датчиков силы тока двигателей в описываемой конструкции и способе оценки сил, к модулю преобразования и цифровой обработки предъявлены следующие требования:
• Обеспечение возможности преобразования сигналов от трехосевого тензометрического датчика на основе тензорезисторов в цифровую форму;
• Наличие микропроцессора для возможности фильтрации и цифровой обработки данных;
• Наличие цифрового интерфейса передачи обработанных данных.
Структурная схема модуля цифровой обработки представлена на фиг. 5. Сигналы о значении силы по трем степеням свободы, поступающие от тензометрического датчика, преобразуются в цифровую форму за счет аналого-цифрового преобразователя, затем поступают на микропроцессор. Микропроцессор осуществляет первичную обработку сигналов, в состав которой может входить фильтрация, алгоритмы зоны нечувствительности, вычитание влияния силы тяжести и другие. При необходимости микропроцессор может передать обработанные данные с использованием модуля приема и передачи. В качестве шины данных может выступать проводное или беспроводное соединение, например, Bluetooth, Wi-fi, RS485, CAN или другое.
С целью обеспечения работы системы в условиях электромагнитных помех целесообразно использование цифрового фильтра нижних частот, а также полосно-заграждающего (режекторного) фильтра с центральной частотой 50 Гц для первичной обработки сигналов от тензометрического датчика. Цифровой фильтр нижних частот – алгоритм, применяемый для подавления сигналов, частота которых превышает заданную. Пример амплитудно-частотной характеристики фильтра нижних частот представлен на фиг. 6.
Использование алгоритма фильтрации в данной системе позволит произвести подавление заведомо шумовых сигналов, частота которых превышает частоту полезных возмущений, возникающих в системе.
В связи с использованием в условиях операционной большого количества электроприборов, работающих от электрической сети 220 В 50 Гц, существует необходимость применения дополнительной фильтрации аналоговых сигналов с наличием полосы подавления в зоне 50 Гц. Так как устройство цифровой обработки имеет микропроцессор, является целесообразным применение алгоритма режекторного фильтра. Пример амплитудно-частотной характеристики фильтров подобного типа приведен на фиг. 7.
Сила воздействия на тензометрические датчики вызывается двумя основными компонентами: внешними силами, возникающими как результат сопротивления при касании инструментом тканей пациента, и силой тяжести элементов конструкции крепления инструмента и самого инструмента. Сигнал, создаваемый силой тяжести, воздействующей на элементы конструкции, не является полезным для системы оценки сил, приложенных к инструменту, и требует устранения (вычитания).
Инструмент, находящийся в контакте с тензометрическими датчиками, через систему крепления инструмента всегда оказывает на них воздействие, вызванное силой тяжести. Сигналы, вызываемые силой тяжести, действующей на элементы конструкции и инструмент, являются нежелательными для дальнейшей передачи на систему управления. Одним из методов компенсации силы тяжести является вычитание из сигнала тензометрических датчиков постоянных значений, соответствующих силе тяжести и полученных до начала операции методом калибровки. Принцип методики заключается в определении показаний тензометрических датчиков при отсутствии приложенных к инструменту внешних сил, кроме силы тяжести элементов конструкции. Для этого величины сигналов, поступаемых от тензодатчиков, при нахождении инструмента в положении, готовом к работе, запоминаются модулем обработки в качестве нулевого состояния. При дальнейшей работе сигналы, возникающие в системе, будут являться суммой воздействий силы тяжести и сил, прикладываемых к исполнительному механизму инструмента, что позволит эффективно вычитать гравитационную составляющую. Основные преимущества метода состоят в простоте реализации и малых требованиях к вычислительной мощности модуля цифровой обработки. Недостатком является ограничение применения для проведения операций, которые требуют значительного по скорости и амплитуде перемещения элементов конструкции манипулятора, что может создать иное распределение нагрузок от силы тяжести на тензометрические датчики.
Описанная методика компенсации влияния силы тяжести не является единственно возможной для реализации в рамках описываемой системы оценки сил, приложенных к инструменту. Возможны реализации иных алгоритмов, более эффективно решающих задачу компенсации сил тяжести, например, алгоритмов, основанных на модели движения используемого манипулятора, алгоритмов с частотным разделением сигналов, например, на основе фильтра верхних частот, и других. Реализация более эффективных алгоритмов компенсации сил тяжести не вызывает изменений конструкции и принципа работы описываемой системы оценки сил, приложенных к инструменту.
Существует возможность применения в системе оценки сил алгоритмов компенсации сил, вызываемых сопротивлением троакара движению инструмента, и компенсации динамических характеристик элементов, размещенных на оси вращения двигателей. Использование каких-либо алгоритмов компенсации сопротивления троакара движению инструмента и компенсации динамических характеристик элементов не вызывает изменений конструкции и принципа работы описываемой системы оценки сил, приложенных к инструменту.
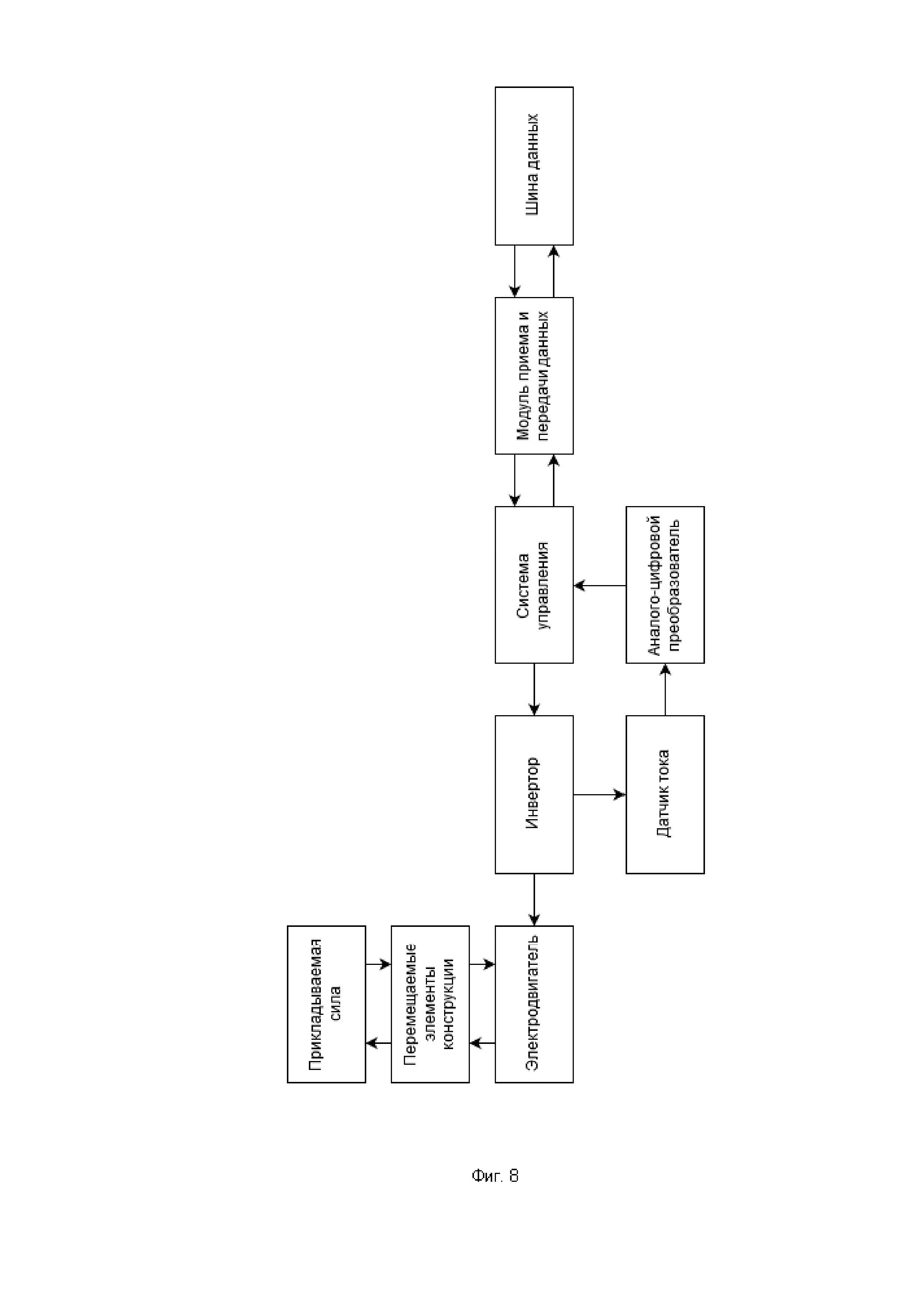
Измерение вращательного момента MRz и усилия захвата МG возможно реализовать за счет измерения силы тока, потребляемого двигателями. Реализацию данного принципа измерений целесообразно производить за счет интеграции измерительного контура в систему управления двигателями, так как система управления содержит в себе микропроцессор и контур измерения силы тока, протекающего через электродвигатель. Для проведения интеграции была разработана структурная схема, изображенная на фиг. 8.
Прикладываемая к элементам конструкции сила вызывает сопротивление движению, которое обеспечивается работой электродвигателя хирургического инструмента и вызывает увеличение потребляемого им тока, протекающего через инвертор и датчик тока. Показания датчика тока переводятся в цифровой вид за счет использования аналого-цифрового преобразователя и передаются в систему управления электродвигателем. Система управления электродвигателем имеет связь с другими элементами системы за счет модуля приема и передачи данных.
Таким образом, информация о приложенных силах получена за счет различных контуров контроля, часть – за счет использования тензометрических датчиков, часть – за счет измерения силы тока двигателей. Для обработки данных, поступающих на модуль обработки (фиг. 3), который является центральным устройством для системы оценки сил, в предпочтительном варианте изобретения используется алгоритм синхронизации данных.
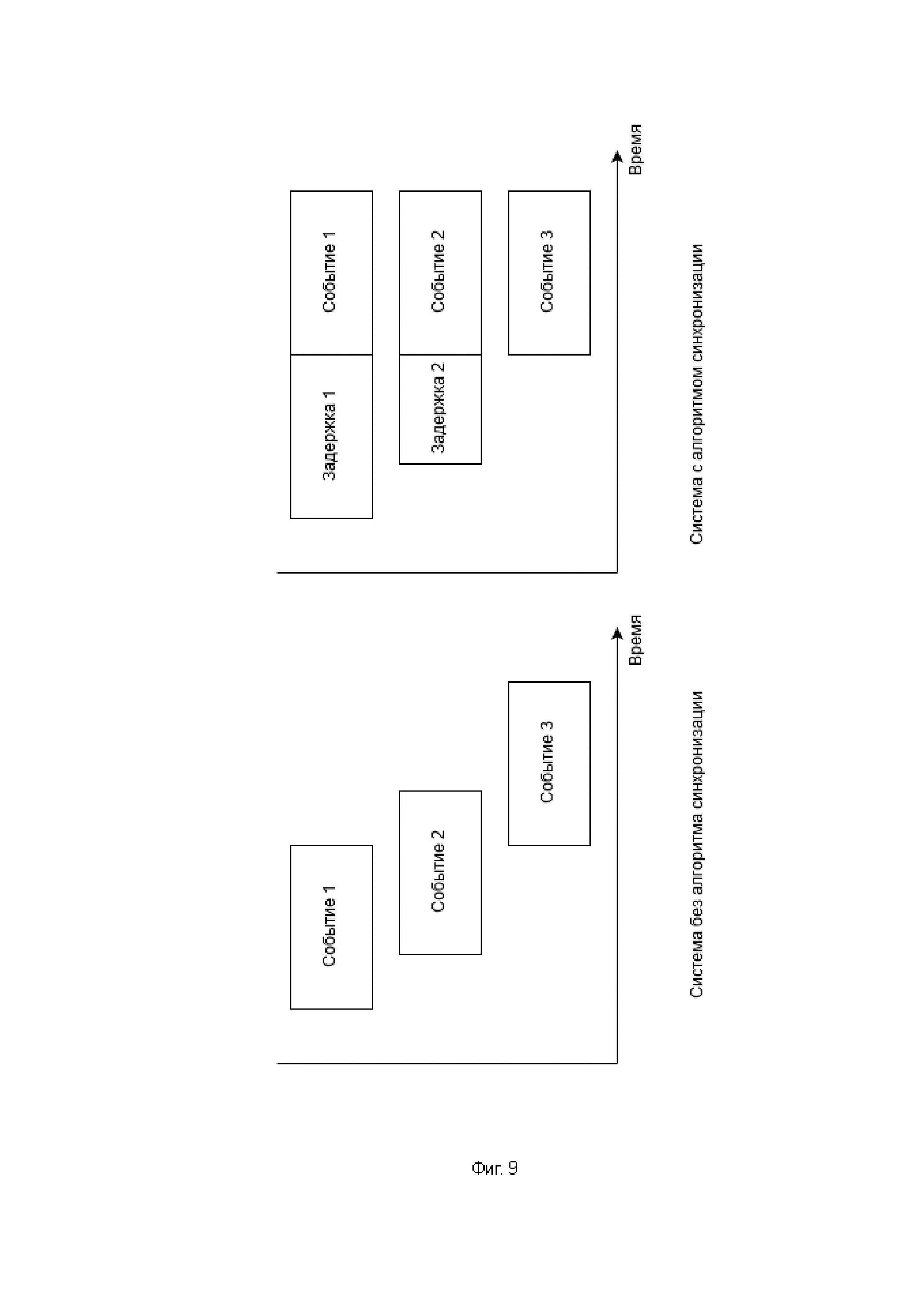
Алгоритм синхронизации данных во времени – алгоритм, позволяющий восстановить последовательность событий, происходящих в системе. Одним из распространенных методов является организация контролируемых задержек, длительность которых зависит от типа возникающего события и структуры тракта передачи информации. Демонстрация работы алгоритма такого типа приведена на фиг. 9.
Одновременные события 1, 2 и 3 имеют различное время запаздывания в тракте обработки, что видно на левой части фиг. 9. Восстановление последовательности событий, приближенной к реальной последовательности, возможно за счет организации задержек 1, 2, 3.
Недостатком алгоритмов подобного типа является увеличение общей задержки системы, но в современных условиях производительности систем реального времени на основе микропроцессоров данный недостаток не является существенным в связи с высокой частотой дискретизации.
Данные с модуля обработки данных поступают на систему управления роботохирургическим комплексом и передаются в систему управления контроллера хирурга.
Хирург удерживает в руках контроллер и, перемещая его, формирует цифровой сигнал, с помощью которого через систему управления роботохиругическим комплексом и манипулятор происходит управление инструментом (Фиг. 1). При соприкосновении инструмента с тканями пациента или троакаром возникают силы, воздействующие на инструмент. Система оценки сил определяет эти силы, преобразует информацию в цифровой сигнал, который через систему управления роботохирургическим комплексом в обратном порядке передается на контроллер хирурга. Контроллер хирурга устроен таким образом, что получает эти сигналы и преобразовывает их в механическое движения контроллера по направлению, противоположному движениям руки хирурга, управляющей инструментом.
Возникающее сопротивление создает на руке ощущение, как если бы она касалась тканей. Интуитивно понятное и совпадающее с движениями руки перемещение инструмента, а также осязание касания инструментом тканей создает у хирурга ощущения, что он во время операции на роботохирургическом комплексе удерживает инструмент непосредственно в руке.
Дальнейшая реализация приведенных методов и разработанных конструкций позволит достичь следующих технических характеристик для системы оценки сил, действующих на инструмент роботизированной хирургической системы:
1. Количество степеней свободы оценки усилия – 7: три линейные степени свободы вдоль осей x, y, z, три вращательные степени свободы вокруг осей x, y, z, степень свободы при захвате;
2. Частота дискретизации: не менее 250 Гц;
3. Тип датчиков для измерения усилий: 3х-осевые тензометрические датчики, датчики потребляемого двигателями тока;
4. Возможность работы в условиях помех, создаваемых инструментом с электрокоагуляцией.
Проведенное моделирование, проектирование элементов конструкции, разработка принципов работы, принципов и методов обработки и передачи данных позволяют сделать вывод о состоятельности предложенных гипотез, выбранные подходы к разработке были теоретически обоснованы, указаны их достоинства и недостатки. Разработанная конструкция позволит реализовать метод оценки сил, действующих на инструмент роботизированной хирургической системы, не обладающий недостатками уже существующих конструкций и позволяющий полностью решить поставленную задачу.
Применение системы оценки сил, действующих на инструмент роботизированной хирургической системы, позволит качественно проводить операции за счет точных действий хирурга, достоверного определения типа и механических характеристик оперируемой ткани. Это достигается благодаря следующим характеристикам:
1. Обеспечение семи степеней свободы при измерении действующих на инструмент сил: трех линейных степеней, трех вращательных и одной степени свободы при захвате;
2. Использования по меньшей мере двух многоосевых тензометрических датчиков для определения направления и модуля действующих сил;
3. Расположения измерительных и прочих электрических цепей, чувствительных к электромагнитным помехам, на удалении от зоны воздействия электрокоагуляции;
4. Использования дополнительного контура оценки силы движения захвата;
5. Использование внешних, не расположенных непосредственно в инструменте, конструкций для установки измерительных элементов, электрических цепей и механизмов.
6. Прием и передача сигналов/команд в системе управления системы оценки силы может быть реализована проводным или беспроводным способом;
7. Использование цифровой обработки сигналов с целью устранения помех;
8. Использование модуля цифровой обработки с поддержкой различных алгоритмов обработки измеряемых данных.
Данная система обеспечивает вклад в роботизированную и/или компьютерную хирургию минимального инвазивного вмешательства, предлагая достоверно точную и дифференцированную по источникам оценку воздействия сил на роботохирургический инструмент в условиях электромагнитного шума, которая бы осуществляла передачу измеренных данных на вышестоящую систему управления роботохирургического комплекса.
Пример.
Лабораторные испытания прототипа системы выполнялись из условия оценки погрешности измерения сил в стандартных условиях для роботохирургии.
Для испытания возможности оценки сил, действующих на хирургический инструмент роботизированной хирургической системы, приложенных к любой части его конструкции было произведено следующее.
Был собран испытательный стенд с использованием двух 3-осевых тензометрических датчиков, один из которых расположен в точке крепления привода хирургического инструмента, а второй в точке крепления держателя троакара.
К сервоприводу поворота инструмента вокруг продольной оси (вращение вокруг оси z) и сервоприводу, обеспечивающему сжатие исполнительных поверхностей хирургического инструмента, были подключены датчики силы тока для измерения вращательного момента, создаваемого двигателями. В блок привода инструмента был установлен инструмент с заранее известными параметрами длины и жесткости. Расстояние между тензометрическими датчиками было зафиксировано и измерено.
Для обеспечения тестового воздействия на испытательный стенд по шести степеням свободы был применен параллельный механизм типа гексапод. Гексапод – это механизм, состоящий из двух площадок – неподвижно закрепленной и подвижной, приводимой в движение при помощи шести независимых прецизионных серводвигателей. Каждый сервопривод оборудован датчиками положения и развиваемого усилия, благодаря чему можно проводить позиционирование по 3-м линейным (X, Y, Z) и трем угловым координатам (вращение вокруг соответствующих осей Ox, Oy, Oz), а также оценивать усилия по каждой из координат. К подвижной платформе гексапода посредством крепежных элементов был присоединен дистальный конец хирургического инструмента. При помощи системы управления гексапода по каждой из степеней свободы производились приращения с фиксированием развиваемого усилия.
Сигналы по пяти степеням получены из показаний тензометрических датчиков. Сигнал о шестой степени свободы – вращение вокруг оси z – из показаний датчика силы тока привода, с использованием коэффициента перевода.
В результате выполненных испытаний была выявлена возможность оценки сил по шести степеням свободы не хуже, чем 10% процентов от показаний, принятых эталонными.
Для измерения усилия сжатия исполнительных поверхностей хирургического инструмента использовалась полая гибкая резиновая трубка малого диаметра от 4 мм до 6 мм. Один конец данной трубки закупорен, а ко второму подключен высокоточный датчик давления. При помощи сервопривода инструмента, обеспечивающего сжатие исполнительных поверхностей инструмента, данная трубка пережималась и фиксировалось создаваемое давление внутри трубки. За счет сравнения показаний датчика силы тока двигателя, обеспечивающего сжатие исполнительных поверхностей, и давления внутри трубки оценивалась возможность измерения силы смыкания (силы сжатия).
Таким образом, предлагаемая конструкция системы оценки сил позволяет оценить силы, действующие на хирургический инструмент роботизированной хирургической системы, приложенные к любой части его конструкции, оценить силы захвата, возникающие при смыкании браншей хирургического инструмента, однозначно определить численные значения сил и их направления. При этом конструкция самого хирургического инструмента не подвергается при этом никаким изменениям.
Стандартные условия для роботохирургии включают наличие электромагнитных помех (коагуляция, работа манипуляторов, работа системы управления, работа мобильных телефонов, наличие силовых электрических кабелей и другие). Исследование влияния электромагнитных помех на оценку сил производилось с использованием медицинского электрокоагулятора, широко применяемого при хирургических вмешательствах. Электрокоагуляция является основным источником широкополосных помех, вызываемых возникновением электрических разрядов между обрабатываемой тканью и поверхностью хирургического инструмента.
Исследования влияния помех электрокоагулятора производились за счет записи показаний от двух 3-осевых тензометрических датчиков, при этом указанные датчики системы оценки сил были последовательно расположены в нескольких точках пространства с различным расстоянием от рабочей зоны электрокоагулятора и определенным расстоянием между собой. Также были проведены испытания с изменением выходной мощности электрокоагулятора.
Вторым по распространённости источником помех является бытовая сеть 240В 50 Гц. Исследования влияния бытовой сети проводились за счет последовательного расположения прототипа системы оценки сил в нескольких точках пространства с различным расстоянием от силового провода 240В 50Гц, питающего нагрузку мощностью 500Вт. Выходные сигналы были обработаны алгоритмом Быстрого Преобразования Фурье для построения спектрального представления сигналов для оценки влияния на частоте 50 Гц.
В результате испытаний были выявлены низкое влияние внешних электромагнитных помех, высокое отношение сигнал-шум, высокая точность, что обусловлено конструкцией системы оценки сил и применяемой цифровой обработкой сигналов. Низкое влияние электромагнитных помех и высокое отношение сигнал-шум достигаются за счет расположения тензометрических датчиков путем отдаления их чувствительных элементов от зоны помех электрокоагуляции и использования цифровых методов фильтрации.
Таким образом, была доказана возможность бесперебойной работы системы оценки сил в условиях использования электрокоагуляции хирургическим инструментом и устойчивость к электромагнитным помехам от бытовой сети. Применение цифровых методов фильтрации позволяет отсеивать большинство нежелательных помех.
Были проведены испытания со следующими исходными данными: номинальная нагрузка для тензодатчиков – 100 Н, коэффициент усиления измерительного тракта -2000, количество разрядов аналогово-цифрового преобразователя – 16 бит, частота дискретизации – 14, 7 кГц, максимальная сила тока для датчика оценки вращательного момента привода оси z, оси сжатия исполнительных поверхностей инструмента – 5 А.
В результате выполненных испытаний получены следующие результаты: средняя оценка погрешности в 5% от измерительного диапазона, при этом максимальная погрешность при наличии внешних наводок в виде коагуляции и электромагнитных помех с применением цифровых методов обработки составляет до 10%. Уровень погрешности оценки является удовлетворительным для большинства задач в хирургической лапароскопии. Кроме того, достигнутая с помощью прототипа общая задержка сигнала с учетом тракта усиления и модуля приема и передачи данных составляет не более 3 мс, что делает систему широко пригодной для телеуправления.
Хотя настоящая патентная заявка относится к определенному в прилагаемой ниже в формуле изобретения изобретению, важно отметить, что настоящая заявка на патент содержит основание для формулировки других изобретений, которые могут, например, быть заявлены как объект уточненной формулы изобретения настоящей заявки или как объект формулы изобретения в выделенной и/или продолжающей заявке. Такой объект может быть охарактеризован любым признаком или комбинацией признаков, описанных в настоящем документе.
Тензоплатформа для роботохирургического комплекса
Контроллер кисти для использования в контроллере оператора роботохирургического комплекса
Контроллер запястья для использования в контроллере оператора роботохирургического комплекса
Контроллер оператора для управления роботохирургическим комплексом
Система позиционирования манипулятора роботохирургического комплекса
Ассистирующий хирургический комплекс
Способ управления камерой в роботохирургическом комплексе
Комбинированный манипулятор роботохирургического комплекса
Способ оценки подвижности тазового дна у женщин с использованием трехмерного моделирования
Привод для инструмента эндоскопического хирургического аппарата
Концевой эффектор эндоскопического хирургического аппарата
Способ динамической магнитно-резонансной диагностики пролапса тазовых органов
Способ эндоскопического лечения немышечно-инвазивного рака мочевого пузыря
Способ резекции почки
Привод для инструмента эндоскопического хирургического аппарата
Способ лечения рака предстательной железы
Способ диагностики рака предстательной железы
Концевой эффектор с шарнирным узлом и привод эндоскопического хирургического аппарата

