Результат интеллектуальной деятельности: Игнорирующий турбулентность самолет и датчик изменения угла атаки самолета
Вид РИД
Изобретение
Область техники
Настоящая группа изобретений относится к авиационной технике, более конкретно - к аппаратам тяжелее воздуха, а именно, к выполненным по аэродинамическим схемам «утка» или «тандем», оно может быть использовано в конструкции самолетов, в основном, транспортного назначения.
Уровень техники
Известен игнорирующий турбулентность самолет, содержащий связанные между собой переднюю и заднюю несущие поверхности, снабженные средствами регулирования подъемной силы, функционально зависящими от изменения угла атаки самолета - патент РФ №2666094. Прототипом изобретения по пп. 1-3 формулы является игнорирующий турбулентность самолет, содержащий связанные между собой переднюю и заднюю несущие поверхности, снабженные средствами регулирования подъемной силы, функционально зависящими от изменения угла атаки самолета по патенту РФ №2609644, стр. 11 строки 33-48. Крыло данного самолета, как и положено для «утки», размещенное позади центра масс, снабжено средством регулирования подъемной силы, находящемся в функциональной зависимости от изменения угла атаки самолета. При этом приращение подъемной силы крыла при случайном изменении угла атаки самолета нивелируется противоположно направленным изменением подъемной силы за счет отклонения средства ее регулирования. Переднее горизонтальное оперение (ПГО) выполнено во флюгерном варианте. Такое выполнение несущих поверхностей уменьшает их производные коэффициента подъемной силы по углу атаки самолета до величин близких к нулю. Предполагается, что в результате самолет не будет реагировать на случайные изменения угла атаки и будет игнорировать вертикальные потоки воздушных масс.
В дальнейшем для краткости производную коэффициента подъемной силы поверхности по углу атаки будем называть просто производной.
Приращение подъемной силы крыла из-за изменения угла атаки самолета происходит в фокусе по углу атаки, а изменение подъемной силы из-за отклонения средства регулирования подъемной силы (например, флаперона) происходит в фокусе по его углу отклонения. Указанные фокусы находятся друг от друга на расстоянии примерно равном четверти средней аэродинамической хорды крыла. В результате возникает приводящий к продольной неустойчивости самолета момент тангажа, имеющий довольно существенную величину, которую флюгерное ПГО с близкой к нулю производной компенсировать не в состоянии. Это обстоятельство приводит к ухудшению эксплуатационных характеристик самолета.
Известен датчик изменения угла атаки самолета, содержащий монопланную поверхность (см. патент РФ №2666094), в этом качестве выступает серворуль, поворачивающий флюгерное переднее горизонтальное оперение при изменении угла атаки самолета. Прототипом изобретения по пп. 4-6 формулы является датчик изменения угла атаки самолета, содержащий полипланную поверхность (см. патент РФ №2651958), в этом качестве выступает полипланный серворуль, поворачивающий флюгерное переднее горизонтальное оперение при изменении угла атаки самолета.
Известные датчики обладают существенным недостатком, заключающимся в том, что для положительного приращения подъемной силы находящейся под их управлением поверхности, необходимо, чтобы на них возникло отрицательное приращение подъемной силы, т.е. они снижают эффективность управляемой поверхности. Это обстоятельство приводит к ухудшению эксплуатационных характеристик самолета.
Техническая задача, решаемая настоящей группой изобретений, состоит в создании такого самолета с двумя несущими поверхностями, который обладал бы статической устойчивостью и вследствие этого, а также вследствие усовершенствования датчика угла атаки, самолет обладал бы улучшенными эксплуатационными характеристиками.
Раскрытие сущности изобретения
Эта задача решается тем, что в самолете, содержащем связанные между собой переднюю и заднюю несущие поверхности, снабженные средствами регулирования подъемной силы, функционально зависящими от изменения угла атаки самолета, производная коэффициента подъемной силы по углу атаки самолета положительна для задней поверхности и отрицательна для передней.
Кроме того, передняя несущая поверхность выполнена в виде цельноповоротного переднего горизонтального оперения, шарнирно связанного с задней несущей поверхностью.
Кроме того, передняя несущая поверхность выполнена в виде переднего горизонтального оперения, жестко связанного с задней несущей поверхностью.
Также поставленная задача решается тем, что в датчике изменения угла атаки самолета, содержащем переднюю и заднюю поверхности с крепежным шарниром между ними, производная по углу атаки коэффициента подъемной силы задней поверхности превышает аналогичную производную передней поверхности не менее, чем в полтора раза.
Кроме того, в датчике задняя поверхность является монопланной, а передняя поверхность - полипланной.
Кроме того, датчик одновременно является датчиком изменения скорости встречного воздушного потока.
Это позволяет надежно обеспечить продольную устойчивость самолета и тем самым улучшить его эксплуатационные характеристики.
Краткое описание чертежей
Детали, признаки, а также преимущества настоящей группы изобретений следуют из нижеследующего описания вариантов реализации заявленного самолета с использованием чертежей, на которых:
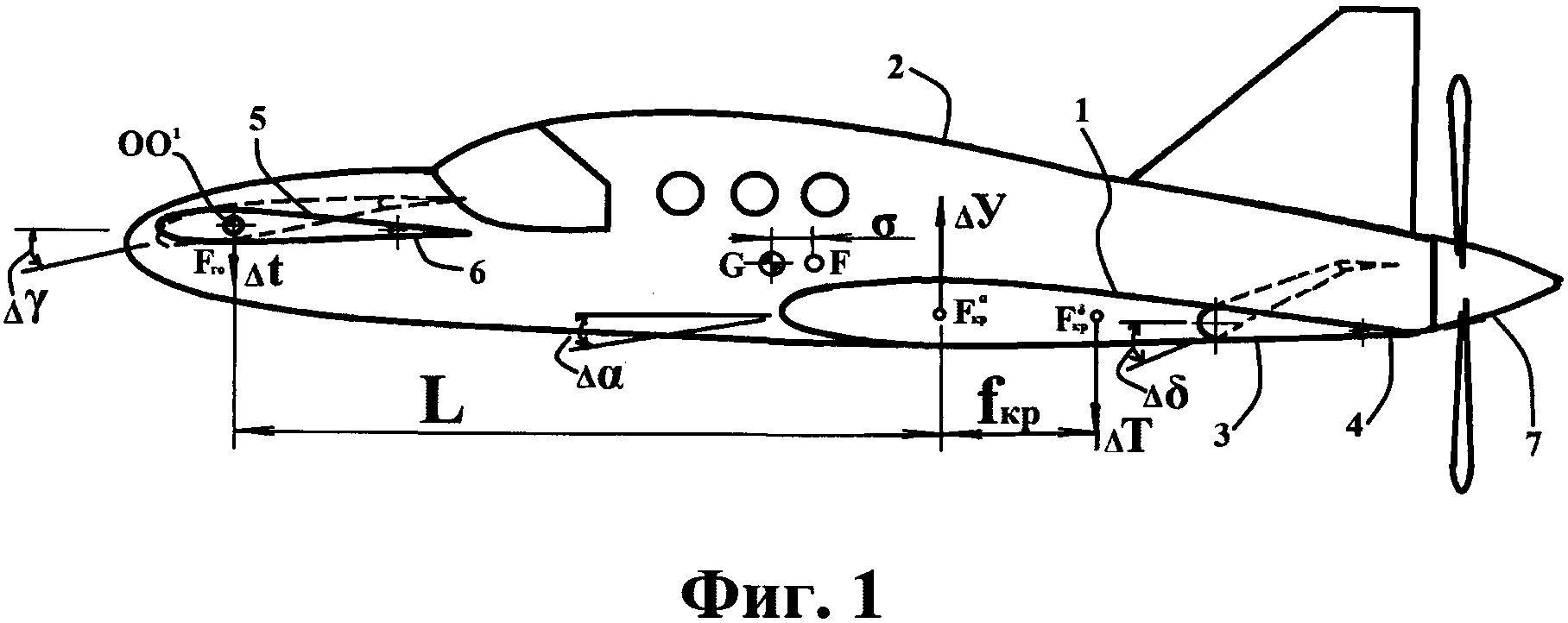
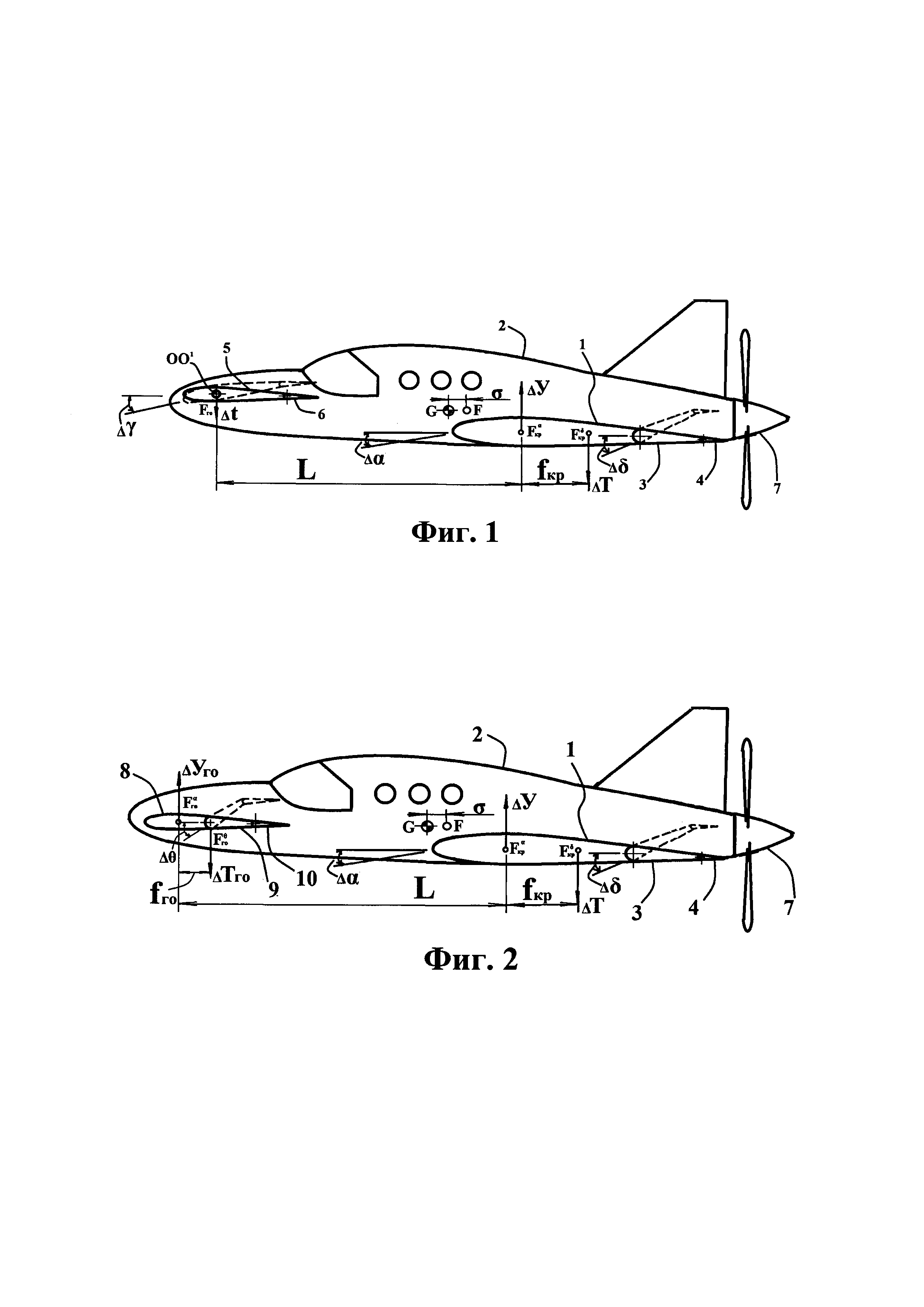
Фиг. 1 представляет схему подъемных сил, действующих на самолет с цельноповоротным передним горизонтальным оперением при случайном увеличении угла атаки;
фиг. 2 представляет схему подъемных сил, действующих на самолет с классическим передним горизонтальным оперением, жестко связанным с фюзеляжем, при случайном увеличении угла атаки;
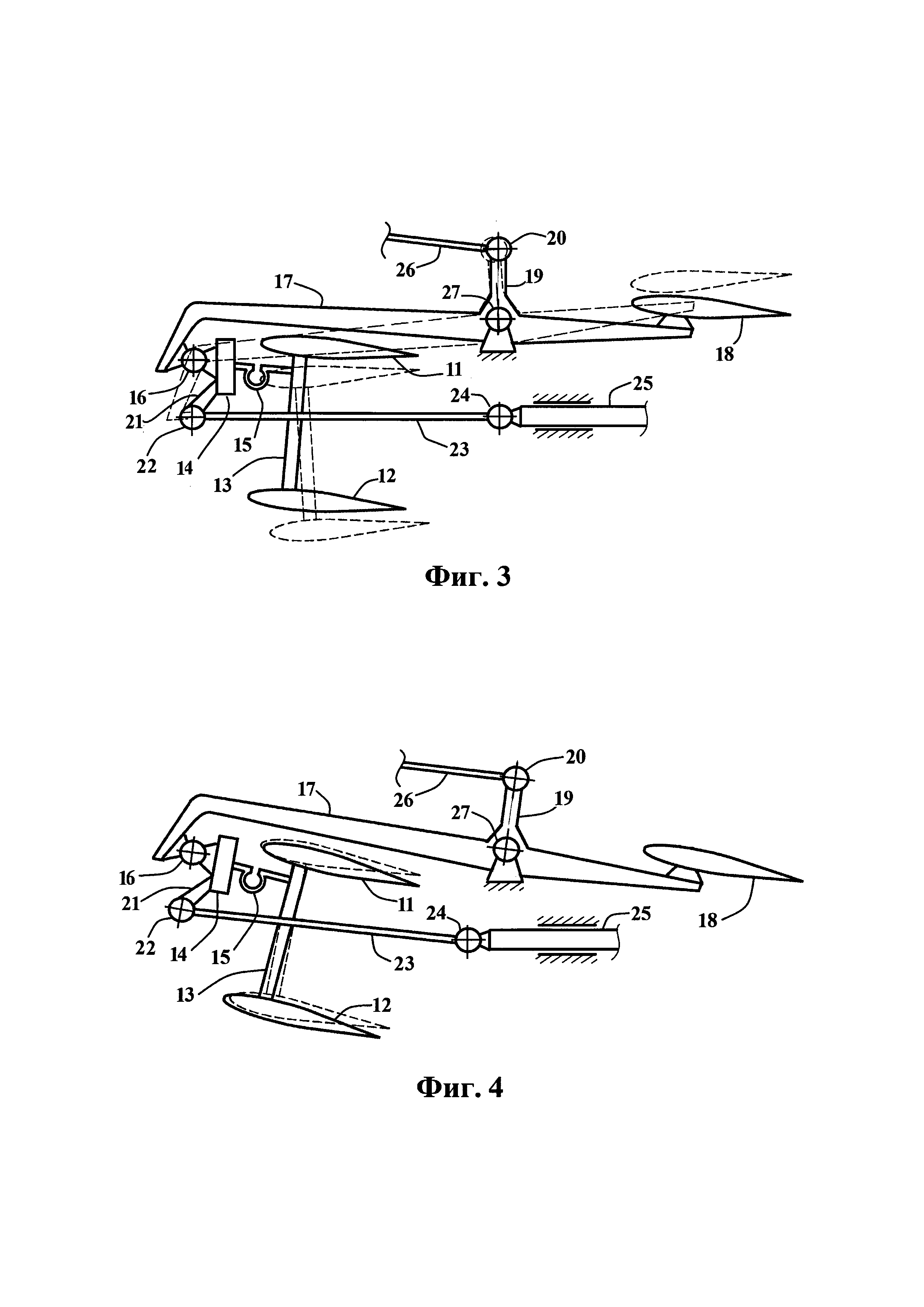
на фиг. 3 изображен датчик изменения угла атаки самолета в положении, соответствующем крейсерскому режиму полета самолета;
на фиг. 4 изображен датчик изменения угла атаки самолета в положении, соответствующем посадочному режиму полета самолета;
Осуществление изобретения
Заявляемый самолет выполнен по аэродинамической схеме «утка», он содержит заднюю несущую поверхность в виде крыла, которое состоит из двух консолей 1 (см. фиг. 1), жестко связанных с фюзеляжем 2. Консоль 1 снабжена шарнирно связанным с ней средством регулирования подъемной силы в виде флаперона 3, который имеет возможность отклоняться под действием аэродинамических сил, в результате отклонения серворуля 4. Передняя несущая поверхность в виде цельноповоротного переднего горизонтального оперения (ЦПГО) 5 шарнирно размещена на фюзеляже по оси ОО1, перпендикулярной плоскости симметрии самолета. Поскольку крыло, состоящее из двух консолей 1, жестко связано с фюзеляжем 2, то передняя несущая поверхность в виде ЦПГО 5 через фюзеляж 2 шарнирно связана с задней несущей поверхностью. Средство регулирования подъемной силы в виде серворуля 6 служит для изменения угла атаки ЦПГО 5 и тем самым обеспечивает возможность изменять его подъемную силу. Винтомоторная установка 7 обеспечивает движение самолета.
Продольная устойчивость самолета обеспечивается следующим образом.
Чтобы на самолет не действовали вертикальные потоки воздушных масс, случайным образом изменяющие угол атаки самолета, флаперон 3 отклоняется вверх при случайном увеличении угла атаки и вниз при его уменьшении. При этом изменение подъемной силы ΔУ консоли 1 крыла за счет изменения угла атаки Δα самолета нивелируется соответствующим изменением подъемной силы ΔT консоли 1 за счет отклонения флаперона 3 на угол δ. Отклонение флаперона 3 осуществляется за счет действия аэродинамических сил в результате отклонения серворуля 4 функционально зависимого от нижеописанного датчика изменения угла атаки самолета. При этом отклонение датчика, возникающее при изменении угла атаки самолета, кинематически преобразуется в отклонения серворулей 4 и 6. Другим вариантом является обслуживание каждой поверхности своим датчиком.
Действие силы ΔУ приложено в фокусе Fαкр крыла по углу атаки, а действие силы ΔT приложено в фокусе Fδкр крыла по углу отклонения закрылка, расположенными друг от друга на расстоянии fкр, примерно равном четверти средней аэродинамической хорды крыла (САХ). Эти силы создают довольно существенный момент тангажа, нарушающий продольную устойчивость самолета. Этот момент может быть скомпенсирован действием ЦПГО 5. Поскольку компенсирующий момент ЦПГО должен быть противоположен по знаку возникающему моменту крыла вследствие случайного приращения угла атаки самолета, производная коэффициента подъемной силы ЦПГО по углу атаки самолета должна быть отрицательной. Т.е. при положительном приращении угла атаки Δα самолета приращение подъемной силы Δt ЦПГО должно быть отрицательным. В связи с тем, что на ЦПГО возникает отрицательное приращение Δt подъемной силы, компенсационное действие флаперона 3 должно быть уменьшено, т.е. величина ΔT по модулю должна быть меньше значения ΔУ на модуль величины Δt. Т. е. при положительном приращении угла атаки Δα результирующее приращение подъемной силы крыла ΔУ+ΔТ также положительно.
В итоге можно констатировать, что в игнорирующем турбулентность самолете производная коэффициента подъемной силы по углу атаки самолета положительна для задней несущей поверхности и отрицательна для передней.
Для определения угла Δδ отклонения флаперона 3 и угла Δγ отклонения ЦПГО 5, при которых полностью сводятся к нулю действия случайных изменений угла атаки Δα самолета сформулируем такие условия: 1- случайное изменение угла атаки Δα не приводит к изменению подъемной силы самолета; 2 - случайное изменение угла атаки Δα порождает стабилизирующий момент тангажа, пропорциональный величине  где:
где:
 - производная по углу атаки коэффициента подъемной силы крыла;
- производная по углу атаки коэффициента подъемной силы крыла;
σ - запас устойчивости, равный расстоянию между фокусом F по углу атаки самолета и его центром масс G.
В результате рассмотрения этих условий получим:

где:
 - производная по углу отклонения закрылка коэффициента подъемной силы крыла;
- производная по углу отклонения закрылка коэффициента подъемной силы крыла;
L - расстояние между фокусами по углу атаки крыла и ЦПГО 5 (межфокусное расстояние - МФР);
fкр - расстояние между фокусом крыла по углу атаки и фокусом крыла по углу отклонения закрылка;
 - производная коэффициента подъемной силы ЦПГО 5 по его углу атаки γ;
- производная коэффициента подъемной силы ЦПГО 5 по его углу атаки γ;
 - отношение площади ЦПГО 5 к площади крыла - двойной площади консоли 1.
- отношение площади ЦПГО 5 к площади крыла - двойной площади консоли 1.
На фиг. 2 изображен игнорирующий турбулентность самолет, в котором в качестве передней несущей поверхности служит классическое переднее горизонтальное оперение (ПГО) 8, жестко связанное с фюзеляжем, оно снабжено средством регулирования подъемной силы в виде руля 9 высоты, отклонение которого осуществляется посредством аэродинамических сил, действующих при отклонении серворуля 10, функционально зависимого от датчика изменения угла атаки самолета. При этом отклонение датчика изменения угла атаки самолета, кинематически преобразуется в отклонения серворулей 4 и 10.
Здесь отличие состоит в том, что отклонение Δθ руля 9 высоты должно скомпенсировать не только дестабилизирующий момент тангажа крыла, вызванное случайным изменением угла атаки Δα самолета, но и вызванное им приращение ΔУго подъемной силы ПГО 8. Исходя из этого датчик должен отклонить флаперон 3 и руль 9 высоты на углы, величины которых удовлетворяют следующим условиям:


где:
fго - расстояние между фокусом ПГО по углу атаки и фокусом ПГО по углу отклонения руля высоты;
 - производная коэффициента подъемной силы ПГО 8 по углу атаки α;
- производная коэффициента подъемной силы ПГО 8 по углу атаки α;
 - производная коэффициента подъемной силы ПГО 8 по углу θ отклонения руля 9 высоты;
- производная коэффициента подъемной силы ПГО 8 по углу θ отклонения руля 9 высоты;
- отношение площади ПГО 8 к площади крыла - двойной площади консоли 1.
В случае, при котором обе несущие поверхности одинаковы, последние формулы примут более простой вид:


Все вышеприведенные формулы нуждаются в уточнениях, учитывающих влияние передней поверхности на скос и снижение скорости воздушного потока за ней.
При использовании электродистанционной системы управления (ЭДСУ) отклонение датчика, возникающее при изменении угла атаки самолета, преобразуется энкодером в электрический сигнал, обрабатывается в ЭДСУ и поступает не на серворули 4, 6, 10, а на приводы флаперона 3, руля 9 высоты и ЦПГО 5.
Техническим результатом изобретения по п.п. 1-3 формулы является обеспечение продольной устойчивости самолета, при этом самолет игнорирует турбулентность атмосферы. Кроме того, поскольку при случайном увеличении угла атаки самолета профиль несущих поверхностей уменьшает свою кривизну, практически полностью устраняется вероятность выхода несущих поверхностей на критический угол атаки вследствие влияния атмосферы. Дополнительно уменьшается сопротивление самолета вследствие того, что подъемная сила несущих поверхностей самолета не превышает силу его тяжести. В итоге улучшаются эксплуатационные характеристики самолета.
На фиг. 3 изображен датчик изменения угла атаки самолета, он содержит переднюю полипланную поверхность, образованную двумя идентичными планами 11 и 12, жестко связанными между собой стойкой 13. Полипланная поверхность 11, 12 со стойкой 13 укреплена на основе 14 с помощью пружины 15, имеющей весьма небольшой ход - порядка 10 градусов. Основа 14 посредством шарнира 16 связана с передним концом балки 17. На заднем конце балки 17 размещена жестко связанная с ней задняя монопланная поверхность 18. На балке 17 также размещен жестко связанный с ней рычаг 19 с шарниром 20 на его конце. Для изменения угла атаки полипланной поверхности 11, 12 служит рычаг 21 с шарниром 22 на его конце и тяга 23 с шарниром 24. Тяга 25 связана с непоказанными на чертеже системой управления механизацией крыла. Тяга 26 связана с непоказанным на чертеже серворулем средства регулирования подъемной силы крыла. Для размещения датчика на конструкции (планере) самолета служит крепежный шарнир 27.
Планы 11, 12 выполняют с малым удлинением - не более трех. Удлинение поверхности 18 должно быть не менее восьми. Расстояние между планами 11 и 12 равно 100-125% хорды планов. Такие параметры поверхностей датчика обеспечивают максимальное приближение фокуса по углу атаки системы поверхностей датчика к задней поверхности 18.
Площади передней 11, 12 и задней 18 поверхностей равны между собой, а их суммарная площадь на 10-20% превышает удвоенную площадь серворуля 4 флаперона 3. При этом расстояния от крепежного шарнира 27 до фокусов передней и задней поверхностей равны.
Свойство датчика отслеживать изменение угла атаки самолета обеспечивается тем, что производная по углу атаки коэффициента подъемной силы его задней монопланной поверхности 18 значительно выше такой же производной передней бипланной поверхности 11, 12. Это следствие большой разности удлинений этих поверхностей, а также значительного снижения величины производной полипланной поверхности по сравнению с монопланной.
В итоге фокус по углу атаки системы поверхностей 11, 12, 18 датчика оказывается существенно позади шарнира 27, служащего для крепления датчика на конструкции самолета. Этим обеспечиваются флюгерные свойства датчика, т.е. его способность само ориентироваться вдоль потока. Эффективная работа датчика возможна при разности производных задней и передней поверхностей датчика не меньшей, чем в полтора раза.
При случайном увеличении угла атаки самолета, например, при входе его в восходящий поток, балка 17 с рычагом 19 отклоняется против часовой стрелки. Положение поверхностей и балки датчика в описанной ситуации представлено на чертеже штриховыми линиями. Углы отклонения для наглядности условно преувеличены.
Управление зависанием флаперона 3 осуществляют смещением в горизонтальном направлении тяги 25 с шарниром 24, вследствие чего происходит поворот на шарнире 16 основы 14 и укрепленной на ней бипланной поверхности 11, 12, что приводит к изменению угла атаки планов 11 и 12. Это вызывает поворот на шарнире 27 балки 17 с рычагом 19 и вслед за ними отклонение флаперона. Управление поворотом датчика возможно вследствие того, что диапазон рабочих углов атаки передней поверхности гораздо шире диапазона задней поверхности. И на краях этих диапазонов, т.е. при максимально возможном отклонении датчика от направления потока, подъемные силы и моменты обеих поверхностей максимальны и равны, при этом обе поверхности находятся под своими критическими углами атаки.
Описанные здесь связи датчика со средствами регулирования подъемной силы передней и задней поверхностей могут выполняться, как средствами представленной здесь жесткой проводки, так и тросовой.
При использовании ЭДСУ датчик снабжают энкодером, сигнал с которого после обработки поступает на приводы средств регулирования подъемной силы передней и задней поверхностей.
Для того, чтобы датчик реагировал не только на вертикальные, но и на горизонтальные воздушные потоки служит пружина 15 (см. фиг. 4). Пусть датчик установился под некоторым углом атаки к встречному потоку, например, в положении, соответствующем этапу посадки. Увеличение скорости встречного потока приводит к увеличению нагрузки на пружину 15, в результате чего планы 11, 12 несколько уменьшат угол атаки, что отражено штриховыми линиями. В то же время поверхность 18 сохранит свой угол атаки.
Это приведет к отклонению против часовой стрелки балки 17 с рычагом 19 и соответствующему отклонению вверх флаперона. В результате увеличение подъемной силы консоли крыла за счет увеличения скоростного напора снивелируется уменьшением подъемной силы за счет отклонения вверх флаперона.
Таким образом, происходит ослабление зависимости подъемной силы самолета от изменения скорости встречного воздушного потока.
Как можно видеть, для положительного приращения подъемной силы несущей поверхности датчик должен повернуться таким образом, чтобы его поверхности увеличили свой угол атаки, т.е. приращение подъемных сил поверхностей датчика должно быть тоже положительным.
Техническим результатом изобретения по пп. 4-6 формулы является ликвидации потерь подъемной силы на датчике. Кроме того, усовершенствование датчика позволяет существенно ослабить зависимость подъемной силы самолета от горизонтальных порывов (сдвига) ветра.
К дополнительным преимуществам всей группы изобретений следует отнести создание возможности уменьшения массы планера самолета, поскольку несущие поверхности не подвержены усталостному износу и их можно будет рассчитывать на нагрузку, испытываемую самолетом при касании ВПП. В итоге улучшаются эксплуатационные характеристики самолета.
Взрыватель для удлиненного кумулятивного заряда (краснов-запал) и способ инициирования заряда с продольной кумулятивной выемкой
Удлиненный кумулятивный заряд (краснов-заряд)
Авиамодельная электрокорда
Летательный аппарат схемы "флюгерная утка" (краснов-утка)
Летательный аппарат с флюгерным горизонтальным оперением
Флюгерное горизонтальное оперение (краснов-флюгер)
Летательный аппарат с двумя несущими поверхностями (краснов - план)
Электрическая модель самолета
Кордовая модель самолета
Взрыватель для удлиненного кумулятивного заряда (краснов-запал) и способ инициирования заряда с продольной кумулятивной выемкой
Удлиненный кумулятивный заряд (краснов-заряд)
Авиамодельная электрокорда
Летательный аппарат схемы "флюгерная утка" (краснов-утка)
Летательный аппарат с флюгерным горизонтальным оперением
Флюгерное горизонтальное оперение (краснов-флюгер)
Летательный аппарат с двумя несущими поверхностями (краснов - план)
Электрическая модель самолета
Кордовая модель самолета

