Результат интеллектуальной деятельности: Электрогидравлический привод
Вид РИД
Изобретение
Изобретение относится к области машиностроения и может быть использовано в высокоточных быстродействующих электрогидравлических приводах (ЭГП) следящих систем.
Известен объемно-замкнутый гидропривод (патент №2318148), который содержит регулируемый насос с электрогидравлическим механизмом управления (ЭГМУ), гидродвигатель, соединенный гидролиниями с насосом, вспомогательный насос, кинематически соединенный с валом регулируемого поршневого насоса, предохранительный клапан, два подпиточных регулируемых редукционных клапана. Выход вспомогательного насоса соединен с входами предохранительного клапана, электрогидравлического механизма управления, двух подпиточных регулируемых редукционных клапанов. Линии управления редукционных клапанов соединены с междроссельными камерами ЭГМУ.
Недостатками известного объемно-замкнутого гидропривода (ОЗГП) являются:
1 Если в качестве насоса и гидродвигателя применены аксиально-поршневые гидромашины с наклонным диском со свободно посаженными в отверстиях блока цилиндров поршнями, ведение которых осуществляется при помощи давления рабочей жидкости вспомогательного насоса, то такая конструкция практически неприменима в высокоэнергоемких быстродействующих электрогидравлических следящих приводах по причине малой мощности.
2 Вспомогательный насос обеспечивает питание одновременно, как ЭГМУ, так и подпитку силовой части ОЗГП. В динамическом режиме происходит взаимовлияние процессов в ЭГМУ и в силовой части гидропривода, которое проявляется в уменьшении давления питания вспомогательного насоса и соответственно снижению быстродействия и коэффициента усиления ОЗГП.
3 Подсоединение к междроссельным камерам линий управления регулируемых редукционных клапанов приводит к увеличению присоединенных объемов и утечек рабочей жидкости, что ухудшает динамические характеристики ОЗГП.
4 Несмотря на подключение регулируемых редукционных клапанов, вспомогательный насос при его полных подаче и давлении работает постоянно, что снижает КПД ОЗГП. А наличие редукционных клапанов способствует дополнительному образованию потерь гидравлической энергии в процессе снижения величины давления вспомогательного насоса до давления в силовых гидравлических линиях ОЗГП.
5 Внутренняя механическая обратная связь в ОЗГП, выполненная в виде рычажного механизма, передающего движение от регулирующего органа насоса через пружины к золотнику ЭГМУ, снижает быстродействие ОЗГП.
Рассмотренный ОЗГП в лучшем случае может быть применен в транспортных, строительных и других машинах, но не в высокоточных и быстродействующих электрогидравлических приводах слежения, наведения.
Известен ЭГП, например, в изделии СП190 (Руководство по эксплуатации АЮИЖ.461324.001 РЭ АО «ВНИИ «Сигнал» г. Ковров, 2005 г.), принятый за прототип.
ЭГП прототипа содержит приводной двигатель, гидравлически замкнутые между собой аксиально-поршневые гидромотор и регулируемый насос с электрогидравлическим механизмом управления, управляющим положением регулирующего органа регулируемого насоса, объект регулирования, вспомогательный насос, предохранительный клапан, первый и второй подпиточные клапаны, пополнительный бак, сумматор, датчик положения регулирующего органа насоса, при этом вход вспомогательного насоса и выход предохранительного клапана соединены с пополнительным баком, а выход вспомогательного насоса - с гидравлическим входом электрогидравлического механизма управления, с входом предохранительного клапана и с входами первого и второго подпиточных клапанов, выходы которых соединены с соответствующими силовыми гидравлическими магистралями ЭГП, вал приводного двигателя кинематически соединен через вал регулируемого насоса с валом вспомогательного насоса. Датчик положения кинематически соединен с регулирующим органом регулируемого насоса, а своим электрическим выходом соединен с первым входом сумматора, второй электрический вход которого является управляющим входом ЭГП, а его электрический выход соединен с электрическим входом ЭГМУ.
Недостатками указанного ЭГП являются:
1 Уменьшение давления питания ЭГМУ при подаче рабочей жидкости от вспомогательного насоса одновременно на ЭГМУ и в подпиточные клапаны приводит к уменьшению коэффициента усиления, быстродействия ЭГМУ и, как следствие, к уменьшению полосы пропускания на верхних частотах отработки управляющего воздействия.
2 Значительная зона нечувствительности к смене знака управляющего воздействия вследствие относительно высокого давления подпитки.
3 Большое тепловыделение от работы вспомогательного насоса при необходимом значении давления и подачи, особенно в статическом режиме работы ЭГП. Это снижает КПД и определяет наличие отдельной системы охлаждения в составе ЭГП.
4 Повышенное давление подпитки силовых гидравлических магистралей приводит к значительным утечкам в регулируемом насосе и гидродвигателе. Требуется время для создания требуемого перепада давления на гидродвигателе для восполнения этих утечек и преодоления момента или усилия трения в гидродвигателе.
Изобретение направлено на увеличение диапазона регулирования и улучшение динамических характеристик ЭГП, в частности на уменьшение зоны нечувствительности при управляющем воздействии малой частоты и амплитуды, на увеличение полосы пропускания при отработке управляющего воздействия, а также на эффективное использование гидравлической энергии, т.е. на повышение КПД ЭГП.
Технический результат достигается тем, что в ЭГП, содержащий приводной двигатель, кинематически соединенный с ним регулируемый насос (РН), гидродвигатель, позиционный электрогидравлический механизм управления (ПЭГМУ), состоящий из датчика положения, сумматора и ЭГМУ, вспомогательный насос, кинематически связанный с валом РН, предохранительный клапан, первый и второй подпиточные клапаны, пополнительный бак, исполнительный механизм, кинематически соединенный с валом или штоком гидродвигателя, гидродвигатель и РН связаны объемно-замкнутыми силовыми гидравлическими магистралями, вход вспомогательного насоса и выход предохранительного клапана соединены с пополнительным баком, а выход вспомогательного насоса - с входом предохранительного клапана, и с входами первого и второго подпиточных клапанов, выходы которых соединены с соответствующими объемно-замкнутыми силовыми гидравлическими магистралями ЭГП, механический вход датчика положения кинематически соединен с выходом ЭГМУ и с регулирующим органом РН, а электрический выход соединен с первым входом сумматора, второй электрический вход которого является управляющим входом для ЭГП, а выход сумматора соединен с управляющим электрическим входом ЭГМУ, введены дополнительный вспомогательный насос, кинематически связанный с валом РН, и дополнительный предохранительный клапан. Вход дополнительного вспомогательного насоса соединен с пополнительным баком, а его выход - с входом дополнительного предохранительного клапана и с гидравлическим входом ЭГМУ, выход дополнительного предохранительного клапана соединен с пополнительным баком, причем давление питания ПЭГМУ Рпит ПЭГМУ, подаваемое от дополнительного вспомогательного насоса, определяется соотношением (Кулагин А.В. и др. Основы теории и конструирования объемных гидропередач. М.: Машиностроение. 1969 г. стр. 334):

где Рпит ПЭГМУ - давление питания ПЭГМУ,
τ - постоянная времени ПЭГМУ,
а - периметр дросселирующей щели,
ψ - эквивалентный коэффициент расхода,
F - площадь, например, управляющего поршня ПЭГМУ,
ρ - плотность рабочей жидкости,
ΔРзап1 - запас давления, назначаемый в зависимости от конструктивных особенностей, технологического состояния и требований к виброустойчивости ЭГМУ, при этом давление подпитки, подаваемое от вспомогательного насоса через первый и второй подпиточные клапаны в объемно-замкнутые силовые гидравлические магистрали ЭГП Рпит СГМ, для устранения кавитации в них, определяется соотношением (Башта Т.М. Машиностроительная гидравлика. Справочное пособие. М.: Машгиз 1963 г. стр. 94-96):

где Рпит СГМ _ давление подпитки объемно-замкнутых силовых гидравлических магистралей ЭГП,
к - коэффициент, характеризующий тип гидромашины,
ρ - плотность рабочей жидкости,
v - скорость вытеснителя (например, поршня) гидромашины,
Pt - давление насыщенных паров рабочей жидкости,
ΔРзап2 - запас давления, назначаемый в зависимости от конструктивных особенностей РН и гидродвигателя и обеспечивающий виброустойчивость ЭГП.
Но при этом давление подпитки объемно-замкнутых силовых гидравлических магистралей Рпит СГМ должно быть не менее давления, рекомендуемого в паспортах элементов ЭГП, особенно на входе всасывающей гидравлической магистрали РН и на выходе гидродвигателя, давление настройки дополнительного предохранительного клапана соответствует давлению питания ПЭГМУ (Рпит ПЭГМУ) (1), а давление настройки предохранительного клапана соответствует давлению подпитки объемно-замкнутых силовых гидравлических магистралей Рпит СГМ (2) ЭГП с учетом потерь давления на первом и втором подпиточных клапанах и присоединенных к ним гидравлических линий.
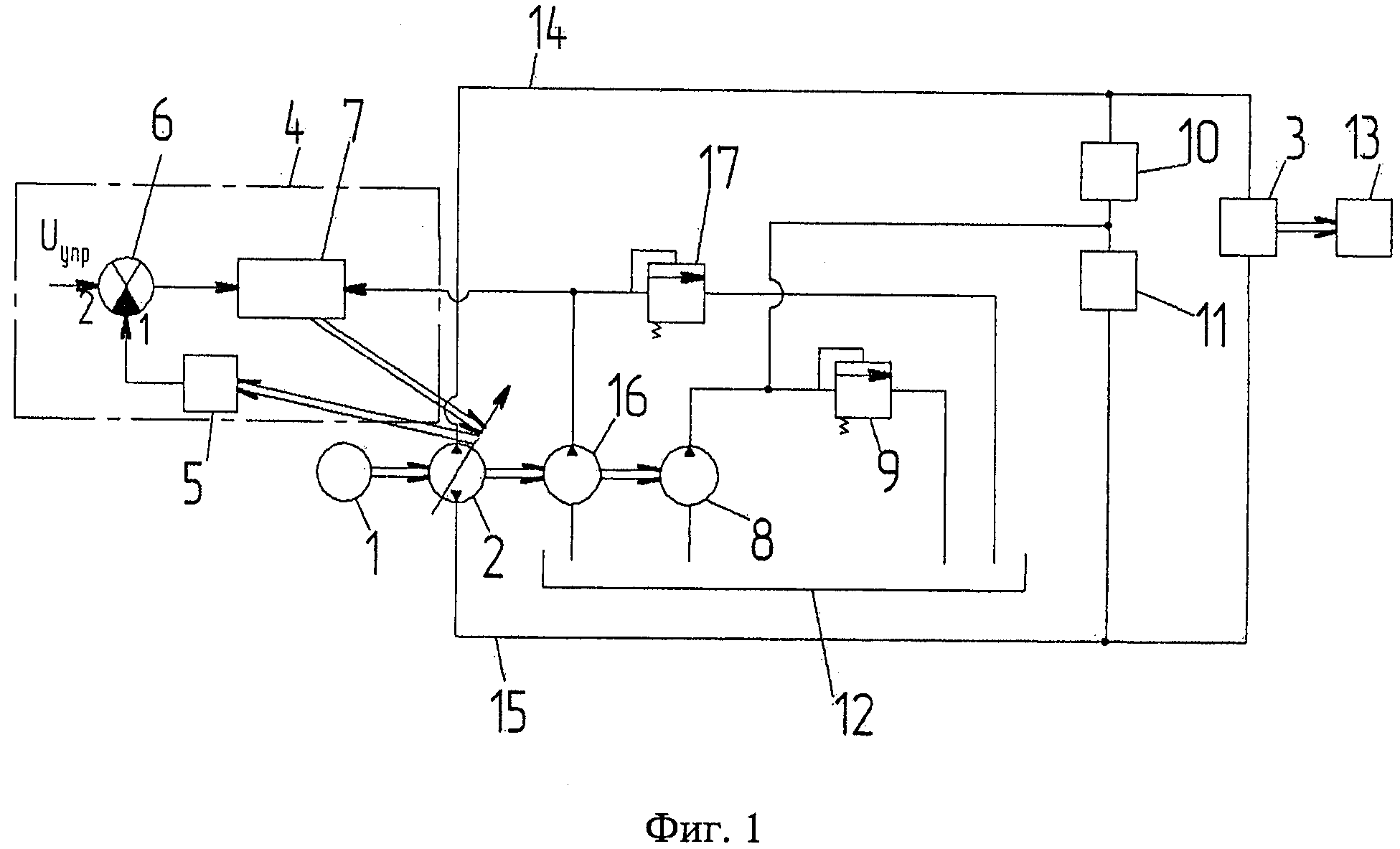
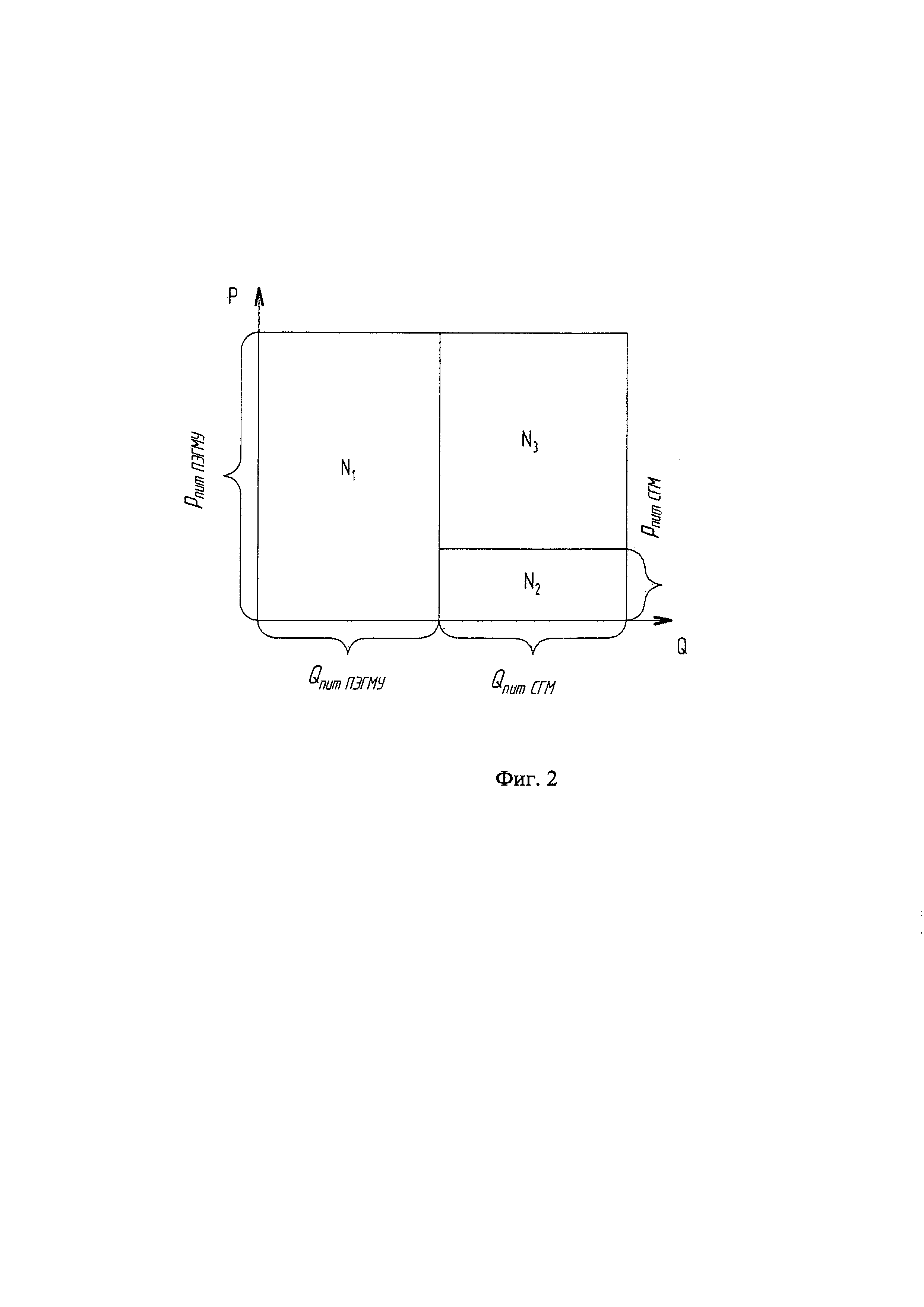
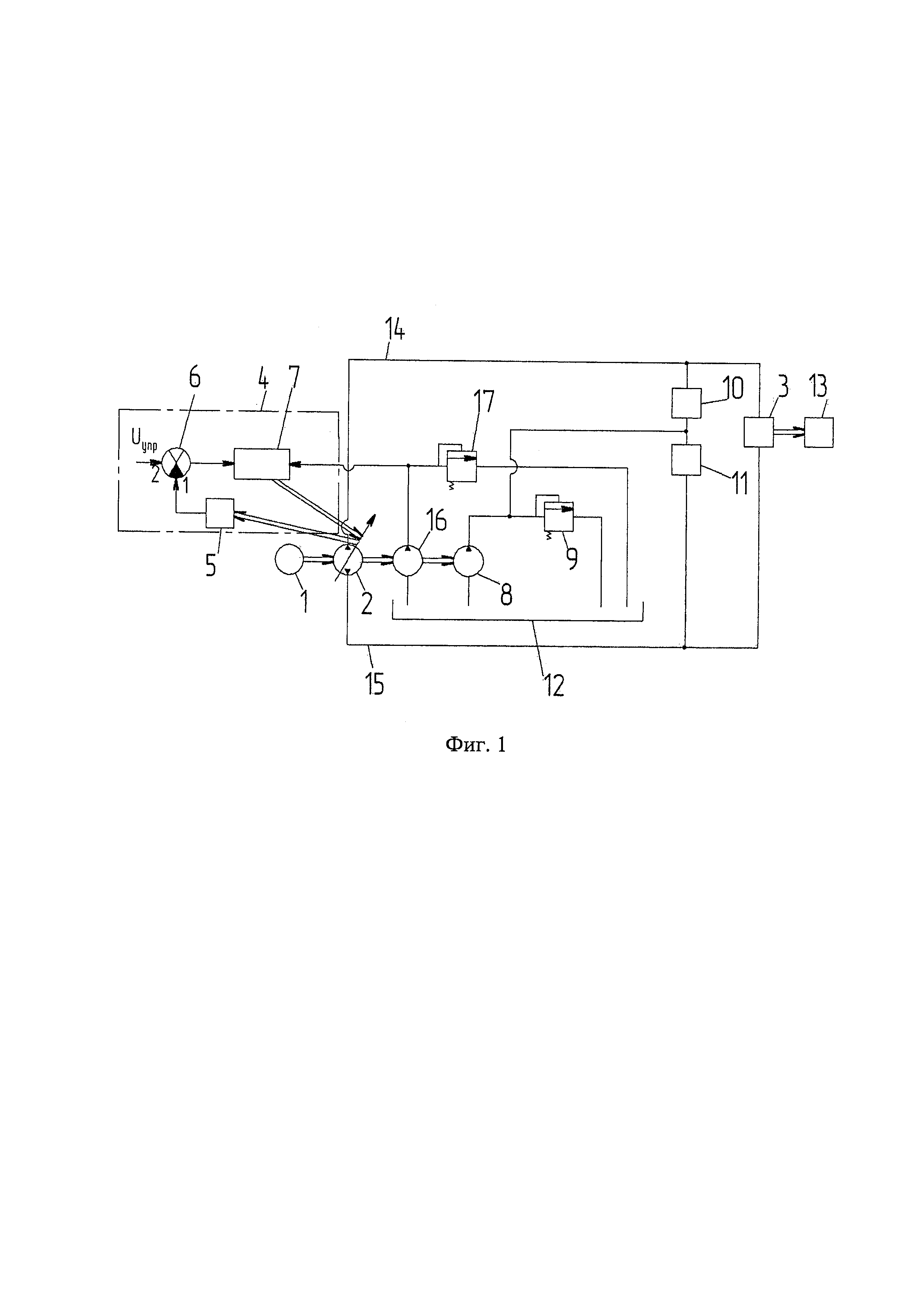
На фиг. 1 приведена структурная схема электрогидравлического привода. На фиг. 2 показано сравнение развиваемых мощностей одного вспомогательного насоса в составе ЭГП и развиваемых мощностей двух предлагаемых вспомогательных насосов.
ЭГП (фиг. 1) содержит приводной двигатель 1, кинематически связанный с ним РН 2, гидродвигатель 3, ПЭГМУ 4, состоящий из датчика положения 5, сумматора 6 и ЭГМУ 7, вспомогательный насос 8, кинематически связанный с валом РН 2, предохранительный клапан 9, первый 10 и второй 11 подпиточные клапаны, пополнительный бак 12, исполнительный механизм 13, кинематически соединенный с валом или штоком гидродвигателя 3, гидродвигатель 3 и РН 2 связаны объемно-замкнутыми силовыми гидравлическими магистралями 14 и 15, вход вспомогательного насоса 8 и выход предохранительного клапана 9 соединены с пополнительным баком 12, а выход вспомогательного насоса 8 - с входом предохранительного клапана 9 и с входами первого 10 и второго 11 подпиточных клапанов, выходы которых соединены с соответствующими объемно-замкнутыми силовыми гидравлическими магистралями 14, 15, механический вход датчика положения 5 кинематически соединен с выходом ЭГМУ 7 и с регулирующим органом РН 2, а электрический выход соединен с первым входом сумматора 6, второй электрический вход которого является управляющим входом ЭГП, а выход сумматора 6 соединен с управляющим электрическим входом ЭГМУ 7.
В ЭГП введены дополнительный вспомогательный насос 16, кинематически связанный с валом РН 2, и дополнительный предохранительный клапан 17, вход дополнительного вспомогательного насоса 16 соединен с пополнительным баком 12, а его выход - с входом дополнительного предохранительного клапана 17 и с гидравлическим входом ПЭГМУ 4, выход дополнительного предохранительного клапана 17 соединен с пополнительным баком 12, причем давление питания ПЭГМУ 4 Рпит ПЭГМУ определяется соотношением (1), а давление подпитки, подаваемое через первый 10 и второй 11 подпиточные клапаны в силовые объемно-замкнутые гидравлические магистрали 14, 15 Рпит СГМ определяется соотношением (2). При этом давление подпитки объемно-замкнутых силовых гидравлических магистралей 14, 15 должно быть не менее давления, рекомендуемого в паспортах элементов электрогидравлического привода, особенно на входе всасывающей гидравлической магистрали РН 2 и на входе гидродвигателя 3, давление настройки дополнительного предохранительного клапана 17 соответствует давлению питания ПЭГМУ 4, а давление настройки предохранительного клапана 9 соответствует давлению подпитки объемно-замкнутых силовых гидравлических магистралей 14, 15, с учетом дополнительных потерь давления на первом 10 и втором 12 подпиточных клапанах и присоединенных к ним гидравлических линий. Кинематическая связь вала приводного двигателя 1 с валами РН 2, вспомогательного насоса 8, дополнительного вспомогательного насоса 16 может быть выполнена непосредственно напрямую с каждым из насосов либо через валы указанных насосов, соединяемых в любой комбинации, последовательно или параллельно.
При вращении вала приводного двигателя 1 и кинематически связанных с ним валов РН 2, вспомогательного насоса 8, дополнительного вспомогательного насоса 16, вспомогательный насос 8 и дополнительный вспомогательный насос 16 всасывают рабочую жидкость из пополнительного бака 12. Дополнительный вспомогательный насос 16 подает рабочую жидкость на вход дополнительного предохранительного клапана 17 и на гидравлический вход ПЭГМУ 4, при этом возникает давление, равное давлению питания ПЭГМУ 4, определяемое настройкой дополнительного предохранительного клапана 17. Вспомогательный насос 8 подает рабочую жидкость на вход предохранительного клапана 9 и на входы подпиточных клапанов 10 и 11 по присоединенным к ним гидравлическим линиям, при этом возникает давление, определяемое настройкой предохранительного клапана 9, равное давлению подпитки объемно-замкнутых силовых гидравлических магистралей 14, 15, с учетом дополнительных потерь давления на первом 10 и втором 11 подпиточных клапанах и присоединенных к ним гидравлических линий. С выходов предохранительных клапанов 9, 17 рабочая жидкость поступает в пополнительный бак 12. С выходов первого 10 и второго 11 подпиточных клапанов рабочая жидкость поступает в силовые объемно-замкнутые гидравлические магистрали 14, 15 соответственно, подпитывая РН 2 и гидродвигатель 3, восполняя утечки.
Электрический сигнал с датчика положения 5 поступает на первый вход сумматора 6, образуя отрицательную обратную связь по положению регулирующего органа РН 2. На второй вход сумматора 6 подается управляющий электрический сигнал Uупр. Результирующий электрический сигнал с выхода сумматора 6 поступает на электрический вход ЭГМУ 7.
При отсутствии управляющего сигнала Uупр РН 2 с регулирующим органом, находящемся в нейтральном (нулевом) положении, подачу рабочей жидкости не производит, поэтому вал (шток) гидродвигателя 3 неподвижен. На электрическом входе ЭГМУ 7 формируется сигнал, как разность управляющего воздействия Uупр. и сигнала обратной связи с датчика положения 5, кинематически связанного с регулирующим органом РН 2. При увеличении на втором входе сумматора 6 управляющего воздействия Uупр. пропорционально изменяется положение регулирующего органа РН 2 и, соответственно, обеспечивается подача рабочей жидкости в одну из объемно-замкнутых силовых гидравлических магистралей 14 или 15 (напорная гидролиния). После начала движения вала (штока) гидродвигателя 3, рабочая жидкость возвращается по одной из объемно-замкнутых силовых гидравлических магистралей 15 или 14 (сливная магистраль) в РН 2. Пропорционально управляющему воздействию Uупр. перемещается регулирующий орган РН 2 и с пропорциональной скоростью перемещается исполнительный механизм 13.
Исследования в АО «ВНИИ «Сигнал» показали следующее. При отсутствии управляющего сигнала Uупр. в обеих объемно-замкнутых силовых гидравлических магистралях 14 и 15 устанавливается давление подпитки, поэтому в обеих магистралях 14 и 15, РН 2 и гидродвигателе 3 появляются начальные утечки рабочей жидкости. В элементах ходовой части гидродвигателя 3 имеются гидромеханические потери, увеличивающиеся с увеличением давления подпитки. С увеличением управляющего сигнала Uупр. увеличивается давление в одной из объемно-замкнутых силовых гидравлических магистралей 14 или 15 и соответственно, растет величина утечек из РН 2, и особенно из гидродвигателя 3, увеличиваясь до значительной величины.
Давление в одной из объемно-замкнутых силовых гидравлических магистралей 14 или 15 возрастает до давления страгивания, после чего вал (шток) гидродвигателя 3 начинает перемещаться, при этом утечки в гидродвигателе 3 уменьшаются до величины, пропорциональной перепаду давления в объемно-замкнутых силовых гидравлических магистралях 14 или 15. Особенно это характерно для гидродвигателей типа аксиально-поршневых гидромоторов с наклонным диском и гидростатическими опорами. Величины давления страгивания и утечек до и после начала движения исполнительного механизма 13 определяют величину минимальной устойчивой скорости гидродвигателя 3.
Уменьшение давления питания объемно-замкнутых силовых гидравлических магистралей 14, 15 по сравнению с давлением питания ЭГМУ 7 при их раздельном питании обеспечивает уменьшение величины утечек рабочей жидкости и гидромеханических потерь в гидродвигателе 3, особенно в гидромоторах аксиально-поршневого типа с наклонным диском и гидростатическими опорами (до 100 раз). Кроме того, снижение давления питания объемно-замкнутых силовых гидравлических магистралей уменьшает зону нечувствительности ЭГП и, соответственно, уменьшает запаздывание на низких частотах, особенно при смене знака скорости движения на выходе гидродвигателя 3. При этом минимальное значение давления подпитки объемно-замкнутых силовых гидравлических магистралей 14, 15 выбирается по условиям, исключающим кавитацию в них или не менее давления, рекомендованного в паспортах элементов ЭГП, например, для входа в РН 2 или для выхода из гидродвигателя 3.
Кроме того, возможность повышения давления питания ПЭГМУ 4, а именно ЭГМУ 7, например типа «сопло-заслонка-золотник», как свидетельствует выражение (1) для постоянной времени ПЭГМУ 4, приводит к улучшению динамических показателей ЭГП, так как постоянная времени т уменьшается, соответственно, увеличивается полоса пропускания ЭГП. Таким образом, повышается точность отработки управляющих воздействий в расширенном диапазоне как низких, так и высоких частот.
На фиг. 2 показано сравнение мощностей подводимой энергии к ПЭГМУ 4 и объемно-замкнутым силовым гидравлическим магистралям 14, 15, где N1 = Рпит ПЭГМУ ⋅ Qпит ПЭГМУ - мощность, подводимая к ПЭГМУ 4;
N2 = Рпит СГМ ⋅ Qпит СГМ - мощность, подводимая к объемно-замкнутым силовым гидравлическим магистралям 14, 15, в качестве подпитки, где Рпит ПЭГМУ _ давление питания ПЭГМУ 4;
Qпит ПЭГМУ - расход рабочей жидкости в ПЭГМУ 4;
Рпит СГМ _ давление питания силовых гидравлических магистралей 14, 15;
Qпит СГМ _ расход рабочей жидкости для подпитки силовых гидравлических магистралей 3, 4.
В случае наличия предлагаемых двух вспомогательных насосов 8, 16, подводимая мощность равна N1+N2. В случае наличия одного вспомогательного насоса (прототип) подводимая мощность равна N1+N2+N3, где N3 = (Pпит ПЭГМУ - Рпит СГМ) Qпит СГМ - сэкономленная мощность (достигающая до 40% по отношению к подводимой мощности прототипа). Соотношения (для наглядности) приведены из условия одинакового давления питания ПЭГМУ в прототипе и в предлагаемом ЭГП.
Таким образом, повышается КПД ЭГП, уменьшается тепловыделение в ЭГП, снижается масса и энергоемкость оборудования, охлаждающего рабочую жидкость.
Испытания, проведенные в АО «ВНИИ «Сигнал», подтвердили эффективность предлагаемых технических решений.


Электрогидравлическая система управления
Электрогидравлический привод
Электрогидравлическая система управления поворотным кольцом стартового ракетного комплекса
Система наведения и стабилизации пакета направляющих боевой машины реактивной системы залпового огня
Электрогидравлическая система управления
Система наведения и стабилизации пакета направляющих боевой машины реактивной системы залпового огня
Электрогидравлический привод
Способ и устройство предупреждения столкновений транспортного средства
Электрогидравлическая система управления
Аппаратура наземной навигации
Легкий фибробетон
Система управления наведением инерционного объекта
Гидропривод постоянной скорости вращения
Электрогидравлический следящий привод
Электрогидравлический следящий привод
Электрогидравлический привод
Устройство управления двигателем постоянного тока
Электрогидравлический привод
Способ формирования опорной геодезической сети испытательной трассы
Гирогоризонткомпас

