Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА
Вид РИД
Изобретение
Изобретение относится к области систем автоматического управления, в частности к системам управления положением инерционных объектов, и может быть использовано в системах управления наведением радиолокаторов, мобильных робототехнических комплексов, орудий и башен самоходных артиллерийских установок (САУ).
Известны системы по патентам РФ №№2071164, 2169938. Их недостатками являются низкое качество переходного процесса и, вследствие этого, недостаточное быстродействие. Это объясняется тем, что в известных устройствах при разгоне и торможении двигателя в процессе отработки рассогласования возникают рывки, которые при большой массе объекта управления приводят к раскачке шасси и, как следствие, к ухудшению качества и увеличению продолжительности переходного процесса.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является система управления инерционным объектом по патенту РФ №2225633, принятая за прототип. Она содержит последовательно соединенные задатчик, измеритель рассогласования, сумматор, усилитель мощности, исполнительный элемент, выход которого механически связан с объектом управления, датчик скорости, вход которого механически связан с исполнительным элементом, а выход - со вторым входом сумматора, датчик положения, вход которого механически связан с объектом управления, а выход - со вторым входом измерителя рассогласования, нуль-орган, вход которого соединен с выходом измерителя рассогласования, пороговое устройство, вход которого соединен с выходом датчика скорости, элемент ИЛИ, первый и второй входы которого соединены соответственно с выходом нуль-органа и выходом порогового устройства, блок коммутации, первый вход которого соединен с выходом измерителя рассогласования, третий управляющий вход соединен с выходом элемента ИЛИ, и интегратор, вход которого соединен с выходом блока коммутации, а выход соединен со вторым входом блока коммутации и третьим входом сумматора.
Недостатком этого устройства является недостаточное быстродействие системы при больших моменте инерции и моменте неуравновешенности объекта управления.
Изобретение направлено на повышение быстродействия.
Сущность технического решения заключается в следующем. Наведение инерционных объектов, например орудия САУ, осуществляется приводами, замкнутыми по положению объекта в инерциальной системе координат. При проектировании приводов наведения таких объектов необходимо учитывать следующие присущие им особенности: большой момент инерции объекта, низкую жесткость механических передач, наличие большого люфта в механической передаче (порядка 2-3 мрад). Большой момент инерции объекта в совокупности с низкой жесткостью механической передачи обуславливает малую резонансную частоту системы механическая передача - объект управления. Малая резонансная частота наряду с большим люфтом механической передачи вынуждает добиваться сокращения времени наведения за счет монотонного характера переходного процесса. При этом обеспечивается перемещение объекта к заданному положению без раскрытия люфта в механической передаче, что позволяет устранить колебания объекта в окончательной фазе переходного процесса в пределах люфта и, соответственно, уменьшить время наведения.
В прототипе высокая точность наведения при действии момента неуравновешенности обеспечивается включением в цепь ошибки системы управления интегратора, управление режимами работы которого (интегрирование и обнуление) осуществляется блоком коммутации по сигналам скорости исполнительного элемента и рассогласования.
При больших скоростях движения исполнительного элемента пороговое устройство формирует сигнал обнуления интегратора. Сигнал обнуления поступает на элемент ИЛИ и далее на управляющий вход блока коммутации. Блок коммутации отключает интегратор от измерителя рассогласования и соединяет вход и выход интегратора, что приводит к его обнулению. Обнуление интегратора при больших скоростях движения исполнительного элемента препятствует накоплению сигнала на его выходе на протяжении всей отработки входного воздействия, что способствует получению переходного процесса без перерегулирования. Движение объекта управления к заданному положению при этом осуществляется за счет сигнала рассогласования.
При подходе к заданному положению скорость исполнительного элемента уменьшается, и при уменьшении сигнала, вырабатываемого датчиком скорости, ниже уровня срабатывания порогового устройства, сигнал обнуления интегратора снимается. Блок коммутации разъединяет вход и выход интегратора и соединяет вход интегратора с выходом измерителя рассогласования. На выходе интегратора начинает вырабатываться сигнал, пропорциональный интегралу сигнала рассогласования.
При наведении объекта управления в направлении, противоположном действию момента неуравновешенности, выходной сигнал интегратора, усиленный усилителем мощности, создает сигнал управления исполнительным элементом, необходимый для преодоления момента неуравновешенности и доведения объекта управления в заданное положение с высокой точностью. Поскольку момент, создаваемый исполнительным элементом по сигналу интегратора, преодолевает момент неуравновешенности объекта, скорость подхода к заданному положению невелика.
При уменьшении сигнала рассогласования в процессе движения объекта управления до уровня допустимой ошибки нуль-орган вырабатывает сигнал обнуления интегратора, который подается на управляющий вход блока коммутации через элемент ИЛИ. При подходе к согласованному положению с малой скоростью обнуление интегратора приводит к остановке объекта управления в заданном положении с ошибкой, не превышающей допустимой величины.
При наведении объекта управления в направлении, совпадающем с действием момента неуравновешенности, момент, создаваемый исполнительным элементом по сигналу интегратора, совпадает с моментом неуравновешенности, вследствие чего включение интегратора приводит к увеличению скорости исполнительного элемента и, соответственно, скорости перемещения объекта управления. Увеличение скорости исполнительного элемента приводит к срабатыванию порогового устройства, по сигналу с которого интегратор обнуляется. Скорость исполнительного элемента вновь уменьшается до величины порога срабатывания порогового элемента. Интегратор через блок коммутации снова подключается к измерителю рассогласования, что приводит к увеличению скорости исполнительного элемента до порога срабатывания порогового устройства и повторному обнулению интегратора. Таким образом, при наведении объекта управления в направлении, совпадающем с направлением действия момента неуравновешенности, при подходе к заданному положению скорость исполнительного элемента также поддерживается вблизи порога срабатывания порогового устройства.
В то же время обнуление интегратора производится хотя и с малой, но конечной постоянной времени, и если при наведении объекта управления в направлении, противоположном действию момента неуравновешенности, уже малое уменьшение сигнала интегратора при его обнулении по сигналу от нуль-органа приводит к остановке объекта управления в заданном положении с ошибкой, не превышающей допустимой величины, то при наведении объекта управления в направлении, совпадающем с действием момента неуравновешенности, обнуление интегратора с конечной постоянной времени и попутное направление момента неуравновешенности могут привести к возникновению перерегулирования и увеличению времени переходного процесса.
Повышение быстродействия системы управления наведением инерционного объекта при наведении в направлении, совпадающем с действием момента неуравновешенности, может быть достигнуто за счет обнуления входного сигнала усилителя мощности при уменьшении сигнала рассогласования в процессе движения объекта управления до уровня допустимой ошибки.
Одновременно для обеспечения монотонного характера переходного процесса обратная связь по скорости исполнительного элемента должна быть достаточно глубокой, т.е. сигнал обратной связи по скорости исполнительного элемента должен иметь достаточно большую крутизну. На практике постоянная глубокая отрицательная обратная связь по скорости исполнительного элемента приводит к тому, что при отработке больших начальных рассогласований исполнительный элемент не может развить максимально возможную скорость, вследствие чего время наведения объекта управления является достаточно длительным. Повышение быстродействия системы управления наведением при отработке больших начальных рассогласований может быть достигнуто за счет включения в цепь обратной связи по скорости исполнительного элемента нелинейного корректирующего звена с переменной крутизной.
Указанный технический результат при осуществлении изобретения достигается тем, что в систему управления наведением инерционного объекта, содержащую последовательно соединенные задатчик, измеритель рассогласования, сумматор, последовательно соединенные усилитель мощности, исполнительный элемент, выход которого механически связан с объектом управления, датчик скорости, вход которого механически связан с исполнительным элементом, датчик положения, вход которого механически связан с объектом управления, а выход - со вторым входом измерителя рассогласования, нуль-орган, вход которого соединен с выходом измерителя рассогласования, пороговое устройство, элемент ИЛИ, первый и второй входы которого соединены соответственно с выходом нуль-органа и выходом порогового устройства, первый блок коммутации, первый вход которого соединен с выходом измерителя рассогласования, третий управляющий вход соединен с выходом элемента ИЛИ, интегратор, вход которого соединен с выходом первого блока коммутации, а выход соединен со вторым входом первого блока коммутации и третьим входом сумматора, включены второй блок коммутации, первый вход которого соединен с выходом сумматора, второй управляющий вход соединен с выходом нуль-органа, а выход соединен с входом усилителя мощности, нелинейное корректирующее звено с переменной крутизной, вход которого соединен с выходом датчика скорости, а выход соединен со вторым входом сумматора и входом порогового устройства.
В заявленном устройстве повышение быстродействия обеспечивается включением второго блока коммутации между сумматором и усилителем мощности, а также включением в цепь обратной связи по скорости исполнительного элемента нелинейного корректирующего звена с переменной крутизной.
При отработке начального рассогласования нуль-орган вырабатывает сигнал логического нуля, по которому второй блок коммутации пропускает выходной сигнал сумматора на вход усилителя мощности. Благодаря нелинейному корректирующему звену с переменной крутизной в цепи обратной связи по скорости исполнительного элемента при отработке больших начальных рассогласований исполнительный элемент развивает высокую скорость движения объекта управления. Для выполнения этой функции нелинейное корректирующее звено имеет большую крутизну в области малых скоростей движения исполнительного элемента, уменьшающуюся по мере увеличения абсолютного значения скорости движения исполнительного элемента. Такой характер зависимости выходного сигнала нелинейного корректирующего звена позволяет обеспечить необходимые для получения монотонного переходного процесса запасы устойчивости системы управления при подходе к согласованному положению и обеспечить при отработке больших начальных рассогласований уровень выходного сигнала сумматора, необходимый для выработки максимального уровня выходного сигнала усилителя мощности.
При больших скоростях движения исполнительного элемента пороговое устройство формирует сигнал логической единицы, который через элемент ИЛИ поступает на управляющий вход первого блока коммутации. Первый блок коммутации отключает интегратор от измерителя рассогласования и соединяет вход и выход интегратора, что приводит к его обнулению. Обнуление интегратора при больших скоростях движения исполнительного элемента препятствует накоплению сигнала на его выходе на протяжении всей отработки входного воздействия, что способствует получению переходного процесса без перерегулирования.
При подходе объекта управления к заданному положению скорость исполнительного элемента уменьшается, и при уменьшении сигнала, вырабатываемого датчиком скорости и передаваемого нелинейным корректирующим звеном с переменной крутизной, ниже уровня срабатывания порогового устройства, на выходе порогового устройства вырабатывается сигнал логического нуля, при этом на выходе элемента ИЛИ также формируется сигнал логического нуля, по которому первый блок коммутации разъединяет вход и выход интегратора и соединяет вход интегратора с выходом измерителя рассогласования. На выходе интегратора начинает вырабатываться сигнал, пропорциональный интегралу сигнала рассогласования. Включение интегратора приводит к увеличению скорости исполнительного элемента и, соответственно, скорости перемещения объекта управления. Увеличение скорости исполнительного элемента приводит к срабатыванию порогового устройства и выработке на его выходе сигнала логической единицы, по которому интегратор обнуляется. Скорость исполнительного элемента вновь уменьшается до величины порога срабатывания порогового элемента. Интегратор через первый блок коммутации снова подключается к измерителю рассогласования, что приводит к увеличению скорости исполнительного элемента до порога срабатывания порогового устройства и повторному обнулению интегратора.
При уменьшении сигнала рассогласования до уровня допустимой ошибки нуль-орган вырабатывает сигнал логической единицы, который подается на управляющий вход первого блока коммутации через элемент ИЛИ и вход второго блока коммутации, при этом первый блок коммутации отключает интегратор от измерителя рассогласования и соединяет вход и выход интегратора, что приводит к его обнулению. Одновременно второй блок коммутации обнуляет сигнал на входе усилителя мощности, что приводит к более быстрой остановке объекта управления в заданном положении с ошибкой, не превышающей допустимой величины.
Таким образом, совокупность перечисленных элементов, соединенных описанным выше способом, позволяет повысить быстродействие.
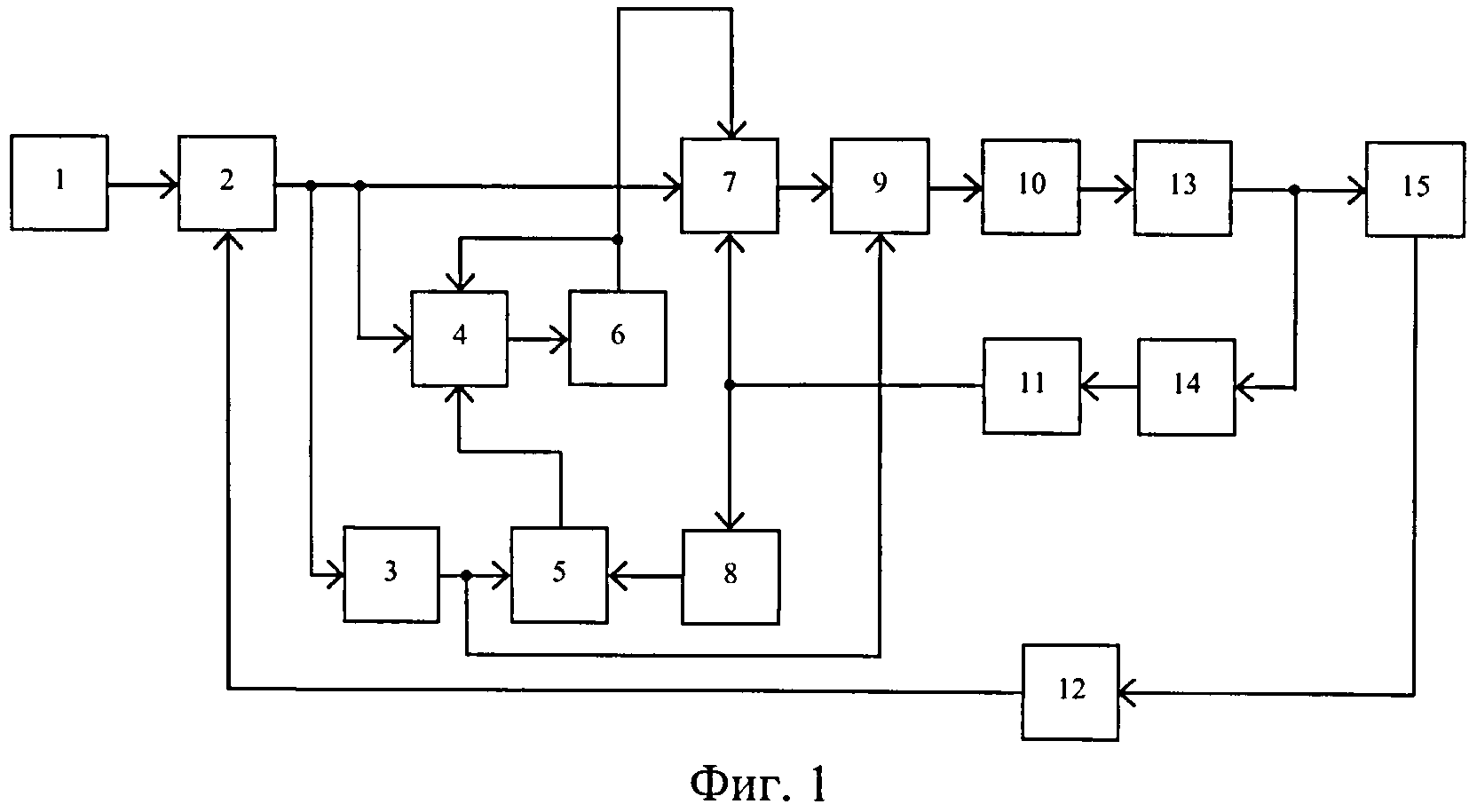
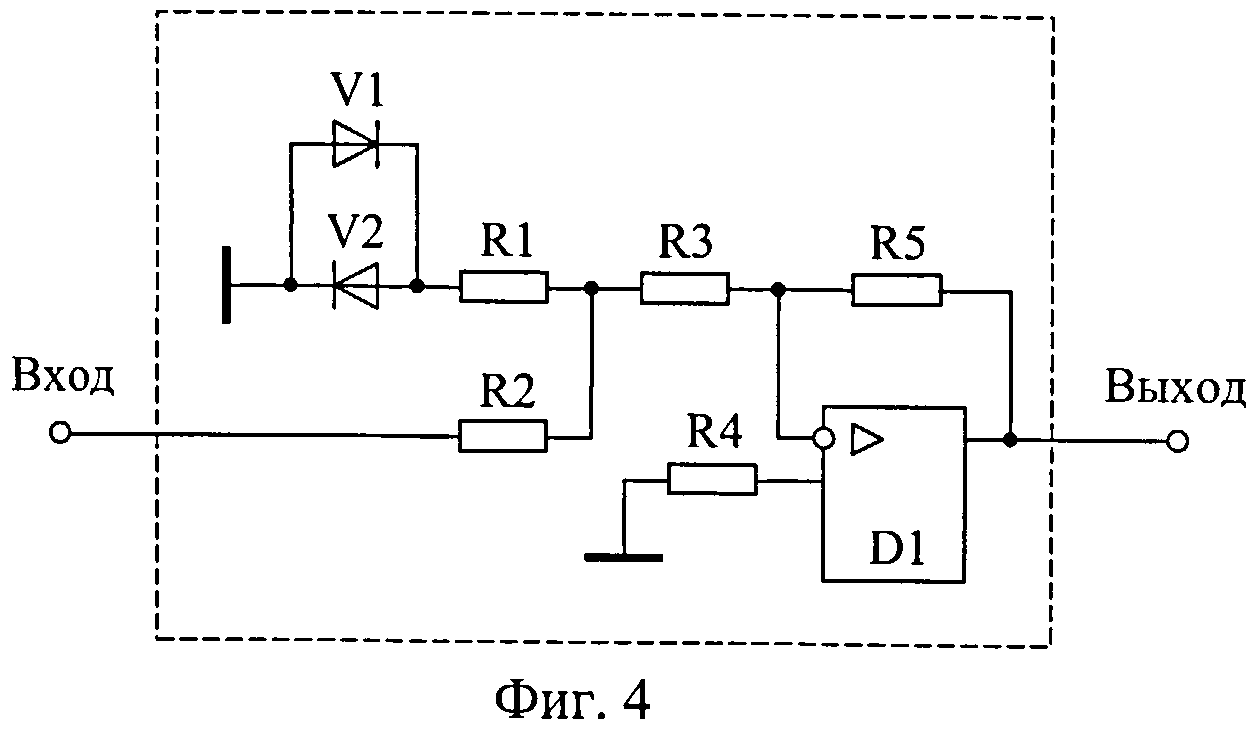
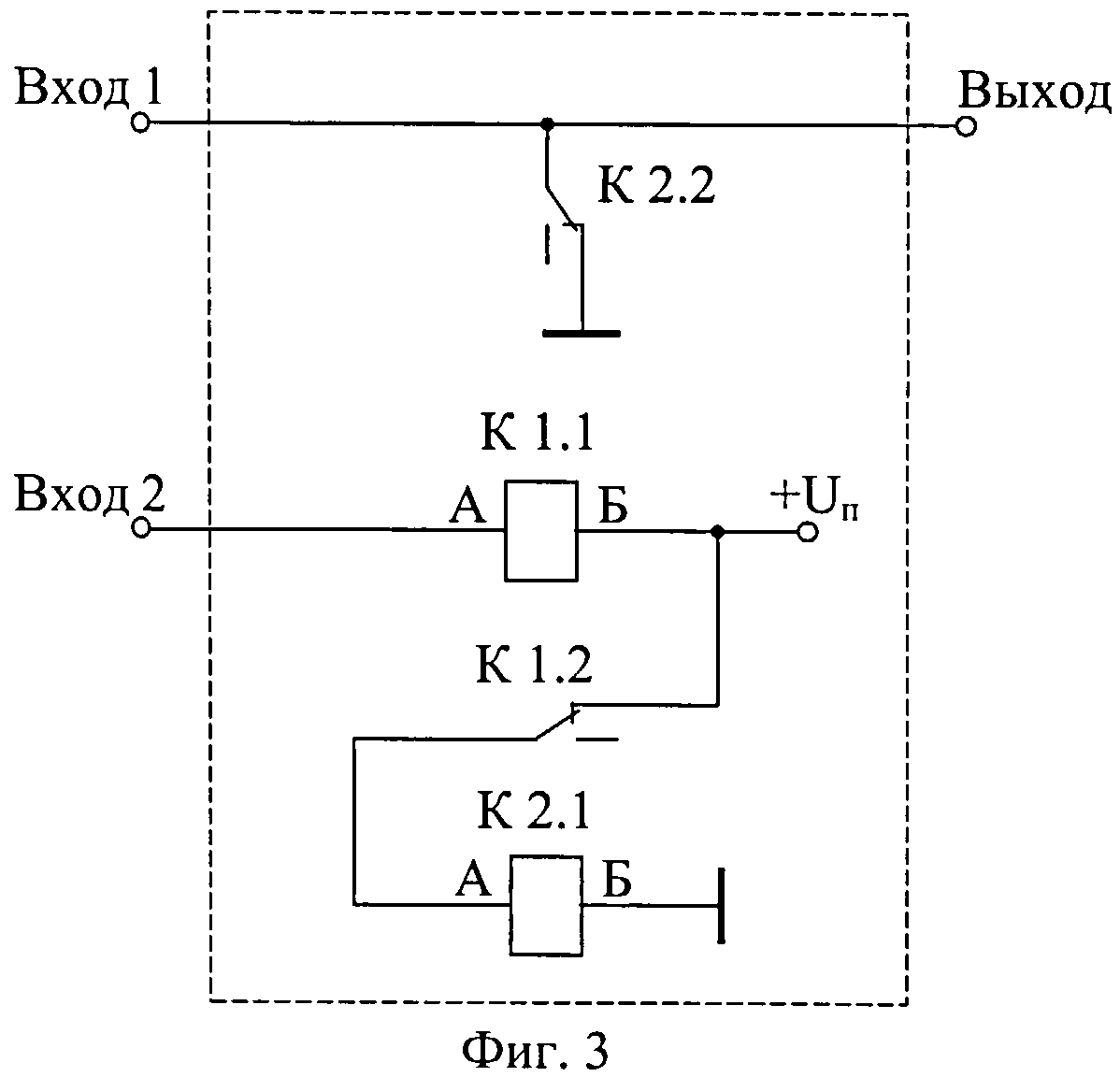
На фиг.1 изображена схема заявляемого устройства, на фиг.2 - пример схемы первого блока коммутации, на фиг.3 - пример схемы второго блока коммутации, на фиг.4 - пример нелинейного корректирующего звена с переменной крутизной.
Сведения, подтверждающие возможность осуществления изобретения с получением указанного выше технического результата, заключаются в следующем.
Система управления наведением инерционного объекта содержит последовательно соединенные задатчик 1, измеритель рассогласования 2, нуль-орган 3, а также первый блок коммутации 4, элемент ИЛИ 5, интегратор 6, сумматор 7, пороговое устройство 8, второй блок коммутации 9, усилитель мощности 10, нелинейное корректирующее звено с переменной крутизной 11, датчик положения 12, датчик скорости 14, исполнительный элемент 13, механически связанный с объектом управления 15. Датчик положения 12 механически связан с объектом управления 15 и соединен выходом со вторым входом измерителя рассогласования 2. Первый и второй входы первого блока коммутации 4 подключены соответственно к выходу измерителя рассогласования 2 и выходу интегратора 6. Третий управляющий вход первого блока коммутации 4 соединен с выходом элемента ИЛИ 5. Выход первого блока коммутации 4 соединен с входом интегратора 6. Первый и второй входы элемента ИЛИ 5 подключены соответственно к выходу нуль-органа 3 и выходу порогового устройства 8. Первый, второй и третий входы сумматора 7 соединены соответственно с выходом измерителя рассогласования 2, выходом нелинейного корректирующего звена с переменной крутизной 11 и выходом интегратора 6. Выход сумматора 7 соединен с первым входом второго блока коммутации 9. Второй управляющий вход второго блока коммутации 9 соединен с выходом нуль-органа 3. Выход второго блока коммутации 9 соединен с входом усилителя мощности 10, выход которого соединен с входом исполнительного элемента 13. Датчик скорости 14 механически связан с исполнительным элементом 13 и соединен выходом с входом нелинейного корректирующего звена с переменной крутизной 11, выход которого соединен с входом порогового устройства 8.
Система управления наведением инерционного объекта работает следующим образом.
Задатчик 1 формирует ступенчатое входное воздействие. Измеритель рассогласования 2 по сигналу входного воздействия и сигналу датчика положения 12 вырабатывает сигнал рассогласования, который поступает на входы нуль-органа 3, первого блока коммутации 4 и сумматора 7. На сумматоре 7 сигнал рассогласования суммируется с выходными сигналами интегратора 6 и нелинейного корректирующего звена с переменной крутизной 11, на вход которого поступает сигнал с выхода датчика скорости 14. Суммарный сигнал с выхода сумматора 7 подается на вход второго блока коммутации 9. При рассогласовании, превышающем уровень допустимой ошибки наведения, нуль-орган 3 вырабатывает сигнал логического нуля, по которому второй блок коммутации 9 пропускает выходной сигнал сумматора 7 на вход усилителя мощности 10. Усилитель мощности 10 воздействует на исполнительный элемент 13, который приводит в движение объект управления 15 в сторону уменьшения рассогласования.
При большом рассогласовании исполнительный элемент 13 движется с высокой скоростью, измеряемой датчиком скорости 14, выходной сигнал которого подается на вход нелинейного корректирующего звена с переменной крутизной 11. При движении исполнительного элемента 13 с высокой скоростью нелинейное корректирующее звено с переменной крутизной 11 имеет малую крутизну, что позволяет обеспечить при отработке больших начальных рассогласований уровень выходного сигнала сумматора 7, необходимый для выработки максимального уровня выходного сигнала усилителя мощности 10. При больших скоростях движения исполнительного элемента 13 пороговое устройство 8 формирует сигнал логической единицы, который через элемент ИЛИ 5 поступает на управляющий вход первого блока коммутации 4. Первый блок коммутации 4 отключает интегратор 6 от измерителя рассогласования 2 и соединяет вход и выход интегратора 6, что приводит к его обнулению. Обнуление интегратора 6 при больших скоростях движения исполнительного элемента 13 препятствует накоплению сигнала на его выходе на протяжении всей отработки входного воздействия, что способствует получению переходного процесса без перерегулирования.
При подходе объекта управления 15 к заданному положению скорость исполнительного элемента 13 уменьшается, и при уменьшении сигнала, вырабатываемого датчиком скорости 14 и передаваемого нелинейным корректирующим звеном с переменной крутизной 11, ниже уровня срабатывания порогового устройства 8, на выходе порогового устройства 8 вырабатывается сигнал логического нуля, при этом на выходе элемента ИЛИ 5 также формируется сигнал логического нуля, по которому первый блок коммутации 4 разъединяет вход и выход интегратора 6 и соединяет вход интегратора 6 с выходом измерителя рассогласования 2. На выходе интегратора 6 начинает вырабатываться сигнал, пропорциональный интегралу сигнала рассогласования. Включение интегратора 6 приводит к увеличению скорости исполнительного элемента 13 и, соответственно, скорости перемещения объекта управления 15. Увеличение скорости исполнительного элемента 13 приводит к срабатыванию порогового устройства 8 и выработке на его выходе сигнала логической единицы, по которому интегратор 6 обнуляется. Скорость исполнительного элемента 13 вновь уменьшается до величины порога срабатывания порогового элемента 8. Интегратор 6 через первый блок коммутации 4 снова подключается к измерителю рассогласования 2, что приводит к увеличению скорости исполнительного элемента 13 до порога срабатывания порогового устройства 8 и повторному обнулению интегратора 6.
При уменьшении сигнала рассогласования до уровня допустимой ошибки нуль-орган 3 вырабатывает сигнал логической единицы, который подается на управляющий вход первого блока коммутации 4 через элемент ИЛИ 5 и управляющий вход второго блока коммутации 9, при этом первый блок коммутации 4 отключает интегратор 6 от измерителя рассогласования 2 и соединяет вход и выход интегратора 6, что приводит к его обнулению. Одновременно второй блок коммутации 9 обнуляет сигнал на входе усилителя мощности 10, что приводит к более быстрой остановке объекта управления 15 в заданном положении с ошибкой, не превышающей допустимой величины.
Необходимые для получения монотонного переходного процесса запасы устойчивости системы управления при подходе объекта управления 15 к согласованному положению обеспечиваются большой крутизной нелинейного корректирующего звена с переменной крутизной 11 в области малых скоростей движения исполнительного элемента 13.
В предлагаемом изобретении при практической реализации могут быть использованы известные схемные реализации нуль-органа, элемента ИЛИ, порогового устройства.
В качестве исполнительного элемента могут быть использованы электродвигатели постоянного и переменного тока, гидромоторы, поворотные гидравлические секторы, гидроцилиндры, комбинированные подъемно-уравновешивающие механизмы.
В качестве усилителя мощности могут быть использованы электромашинные, полупроводниковые усилители, генераторы, регулируемые насосы.
В качестве датчика положения могут быть использованы индуктивные, индукционные, емкостные, потенциометрические, цифровые датчики, а также гироскопические системы.
В качестве блоков коммутации могут быть использованы реле, аналоговые ключи и коммутаторы, а также другие известные схемные реализации. В качестве примера на фиг.2 изображена схема первого блока коммутации, реализованного на реле, на фиг.3 изображена схема второго блока коммутации, реализованного на реле.
В качестве датчика скорости могут быть использованы тахогенераторы постоянного и переменного тока, импульсные датчики скорости, гиротахометры.
В качестве задатчика могут быть использованы механические (шкальные) задатчики, приборы ввода-вывода информации, устройства ввода информации в ЭВМ, а также другие известные схемные реализации.
В качестве измерителя рассогласования могут быть использованы счетно-решающие приборы, ЭВМ, блоки обработки, содержащие ЭВМ, а также другие известные схемные реализации.
В качестве нелинейного корректирующего звена с переменной крутизной могут быть использованы известные схемные реализации. В качестве примера на фиг.4 изображена схема нелинейного корректирующего звена с переменной крутизной, реализованного на операционном усилителе.
Система управления наведением инерционного объекта, содержащая последовательно соединенные задатчик, измеритель рассогласования, сумматор, последовательно соединенные усилитель мощности, исполнительный элемент, выход которого механически связан с объектом управления, датчик скорости, вход которого механически связан с исполнительным элементом, датчик положения, вход которого механически связан с объектом управления, а выход - со вторым входом измерителя рассогласования, нуль-орган, вход которого соединен с выходом измерителя рассогласования, пороговое устройство, элемент ИЛИ, первый и второй входы которого соединены соответственно с выходом нуль-органа и выходом порогового устройства, первый блок коммутации, первый вход которого соединен с выходом измерителя рассогласования, третий управляющий вход соединен с выходом элемента ИЛИ, интегратор, вход которого соединен с выходом первого блока коммутации, а выход соединен со вторым входом первого блока коммутации и третьим входом сумматора, отличающаяся тем, что в нее введены второй блок коммутации, первый вход которого соединен с выходом сумматора, второй управляющий вход соединен с выходом нуль-органа, а выход соединен с входом усилителя мощности, нелинейное корректирующее звено с переменной крутизной, вход которого соединен с выходом датчика скорости, а выход соединен со вторым входом сумматора и входом порогового устройства.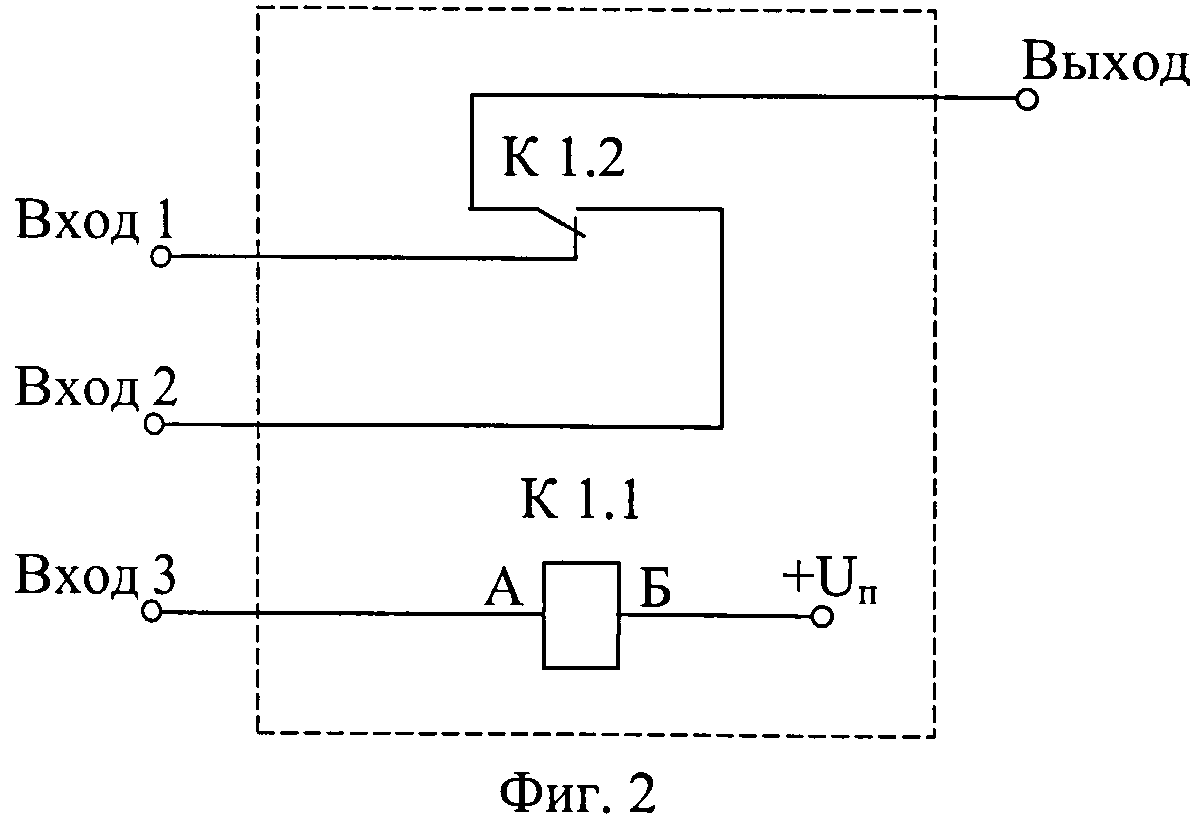
Устройство для обнаружения и сигнализации при приближении к линии электропередач
Способ хирургического лечения карбункула кожи
Система стабилизации пакета направляющих боевой машины реактивной системы залпового огня
Стабилизатор танкового вооружения
Способ управления трехфазным вентильным двигателем
Гидропривод постоянной скорости вращения
Комплексная аппаратура счисления координат
Гирогоризонткомпас
Электрогидравлический следящий привод
Электрогидравлический следящий привод
Устройство для обнаружения и сигнализации при приближении к линии электропередач
Система стабилизации пакета направляющих боевой машины реактивной системы залпового огня
Стабилизатор танкового вооружения
Способ управления трехфазным вентильным двигателем
Гидропривод постоянной скорости вращения
Комплексная аппаратура счисления координат
Гирогоризонткомпас
Электрогидравлический следящий привод
Электрогидравлический следящий привод
Электрогидравлический привод

