Результат интеллектуальной деятельности: Способ и устройство предупреждения столкновений транспортного средства
Вид РИД
Изобретение
Изобретение относится к радиолокационным устройствам, предназначенным преимущественно для систем повышения безопасности движения транспортных средств, например, автомобилей.
Для повышения безопасности движения транспортных средств были разработаны различные радиолокационные устройства, в функции которых входят обнаружение препятствий, измерение до них расстояния, относительной скорости и, при возникновении опасной ситуации, обеспечение включения соответствующей предупредительной сигнализации и/или торможения. Среди таких радиолокационных устройств применяются устройства с непрерывным излучением и частотной модуляцией излучаемого сигнала по пилообразному закону, где для определения расстояния и относительной скорости используется частота биений между излучаемым и отраженным от препятствия сигналом. Типовой вариант такого устройства и принцип определения расстояния и скорости приведен, например, в книге Справочник по радиоэлектронным системам под ред. Б.Х. Кривицкого, том 2, М., «Энергия», 1979 г, стр. 103-105, рис. 7-37 - рис. 7-39.
Недостатки данного устройства проявляются при наличии отраженных сигналов от нескольких транспортных средств, находящихся на разных расстояниях. В данном случае измерение параметров препятствий по частоте биений суммарного сигнала, которая зависит от соотношения уровней и частот всех принятых сигналов, не позволяет достоверно определить степень опасности препятствий и различить их друг от друга.
Известно радиолокационное устройство с частотной модуляцией по патенту США №4348675, в котором для устранения указанных недостатков диапазон частот биений на выходе смесителя, соответствующий рабочему диапазону дальностей радиолокатора, делится на множество поддиапазонов с помощью множества параллельно включенных полосовых фильтров с равными полосами пропускания. Для измерения уровня сигнала после каждого фильтра включен детектор. Сигналы с выходов фильтров и детекторов подаются на вычислительное устройство, на которое поступает также информация о собственной скорости. При постоянном периоде модуляции отраженные сигналы от объектов, расположенных на разном расстоянии, с частотами, пропорциональными расстоянию, выделяются разными фильтрами. Вычислительное устройство, анализируя преобразованные в цифровой вид уровни сигналов с выходов детекторов и частоту сигналов с выходов соответствующих фильтров, обеспечивает идентификацию самого близкого объекта с приоритетом к другим. Используя дополнительно значение собственной скорости, вычислительное устройство определяет также степень его опасности с формированием при необходимости сигналов в систему предупреждения водителя и/или систему управления скоростью движения. При широком диапазоне измеряемых расстояний и высоком разрешении по дальности в данном устройстве требуется большое количество полосовых фильтров, детекторов, что является его недостатком.
Прототипом заявляемого изобретения выбрана радиолокационная система по патенту США №5268692. Указанное изобретение содержит последовательно соединенные модулятор, генератор непрерывного радиолокационного сигнала с частотой, управляемой напряжением, состоящий из задающего генератора, частотного умножителя и полосового фильтра, выход которого соединен с входом ответвителя мощности. Один выход ответвителя мощности соединен с передающей антенной, а выход гетеродинного сигнала - с входом смесителя, другой вход смесителя соединен с приемной антенной. К выходу смесителя последовательно подключены первый усилитель, полосовой фильтр, второй усилитель, аналого-цифровой преобразователь и процессор. Процессор функционально связан с модулятором, со средством предупредительной сигнализации и средством для внешней корректировки отдельных параметров системы. На процессор поступает также информация с датчика собственной скорости. Данное устройство формирует зондирующий частотно-модулированный сигнал, параметры модуляции которого задаются модулятором, управляемым процессором. Биения между излучаемым и отраженным в зоне обнаружения радара сигналами выделяются смесителем, предварительно усиливаются первым усилителем, с выхода которого подаются на полосовой фильтр с полосой пропускания, равной полосе частот биений в рабочем диапазоне расстояний радиолокатора. После последующего усиления вторым усилителем и преобразования биений аналого-цифровым преобразователем в цифровые данные процессором выполняется быстрое преобразование Фурье для получения данных в частотной области, по которым проводится идентификация препятствия по расстоянию и скорости. При определении, с учетом собственной скорости, опасного сближения процессор передает соответствующую информацию в средство предупредительной сигнализации. Недостатком прототипа является возможность неоднозначного измерения расстояния в рабочем диапазоне дальностей при наличии относительной скорости с препятствием. Учитывая, что максимальная частота полосы пропускания фильтра радара ограничена, например, половиной частоты дискретизации аналого-цифрового преобразователя, минимальная частота биений, определяемая расстоянием, при широком диапазоне измеряемой дальности может быть относительно низкой. Данная частота в процессе сближения с препятствием может быть превышена, особенно при использовании малых длин волн излучаемого сигнала, доплеровским смещением частоты от радиальной составляющей относительной скорости. Изменение знака разности этих частот в пределах рабочего диапазона измеряемых дальностей приведет к недостоверным измерениям расстояния и скорости. Кроме того, при частоте биений ниже нескольких килогерц, дополнительной причиной недостоверных измерений может быть воздействие низкочастотных помех, вызванных, например, вибрациями в месте размещения радара.
Целью изобретения является повышение безопасности движения транспортного средства. В предлагаемом способе эта цель достигается делением рабочего диапазона дальностей на несколько поддиапазонов выбором для каждого поддиапазона соответствующей скорости изменения частоты излучаемого сигнала. Уменьшение, по сравнению с полным рабочим диапазоном, отношения максимальной и минимальной дальностей и увеличение скорости изменения частоты в поддиапазоне минимальных дальностей увеличивают, по сравнению с прототипом, частоту биений в данной области. При этом, после измерений в этом поддиапазоне, скорость изменения частоты, для обеспечения поочередного измерения в границах следующих поддиапазонов, каждый раз дискретно уменьшается с увеличением дальности. Максимальная частота биений в каждом поддиапазоне, определяемая заданной скоростью изменения частоты, может быть выбрана равной максимальной частоте биений, обрабатываемой радаром. Минимальная частота биений в поддиапазонах и количество поддиапазонов зависят от выбранного в них отношения максимальной и минимальной дальностей. Чем меньше выбранное отношение, тем выше будет частота биений, соответствующая минимальным расстояниям в поддиапазонах.
Предлагаемый способ включает создание непрерывного радиоволнового излучения с пилообразной частотной модуляцией и прием отраженных в зоне обнаружения радиолокационных сигналов. Излучаемый сигнал, в отличие от прототипа, модулируется по частоте таким образом, чтобы разделить рабочий диапазон дальностей на несколько поддиапазонов для увеличения частоты биений в области минимальных расстояний. При анализе рабочего диапазона последовательно, в течение нескольких полупериодов модулирующего сигнала в каждом поддиапазоне, выделяются биения между излучаемым и принятым сигналами, которые преобразуются в цифровой вид. С каждыми цифровыми данными выполняется быстрое преобразование Фурье для преобразования их в частотную область. Данные в частотной области, полученные в поддиапазонах, используются для идентификации объекта в зоне обнаружения. Способ предупреждения столкновений поясняется на примере построения устройства и рисунками.
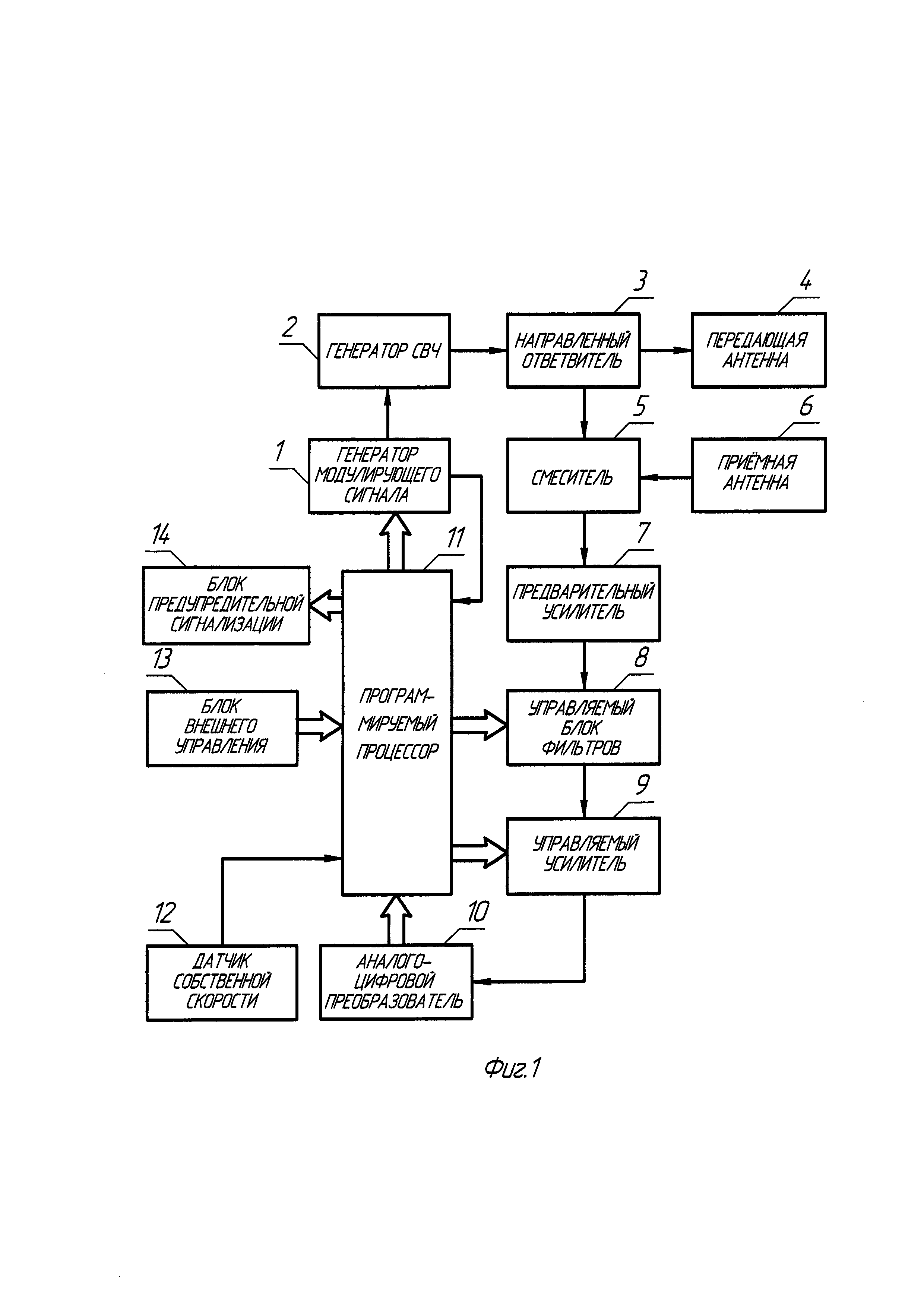
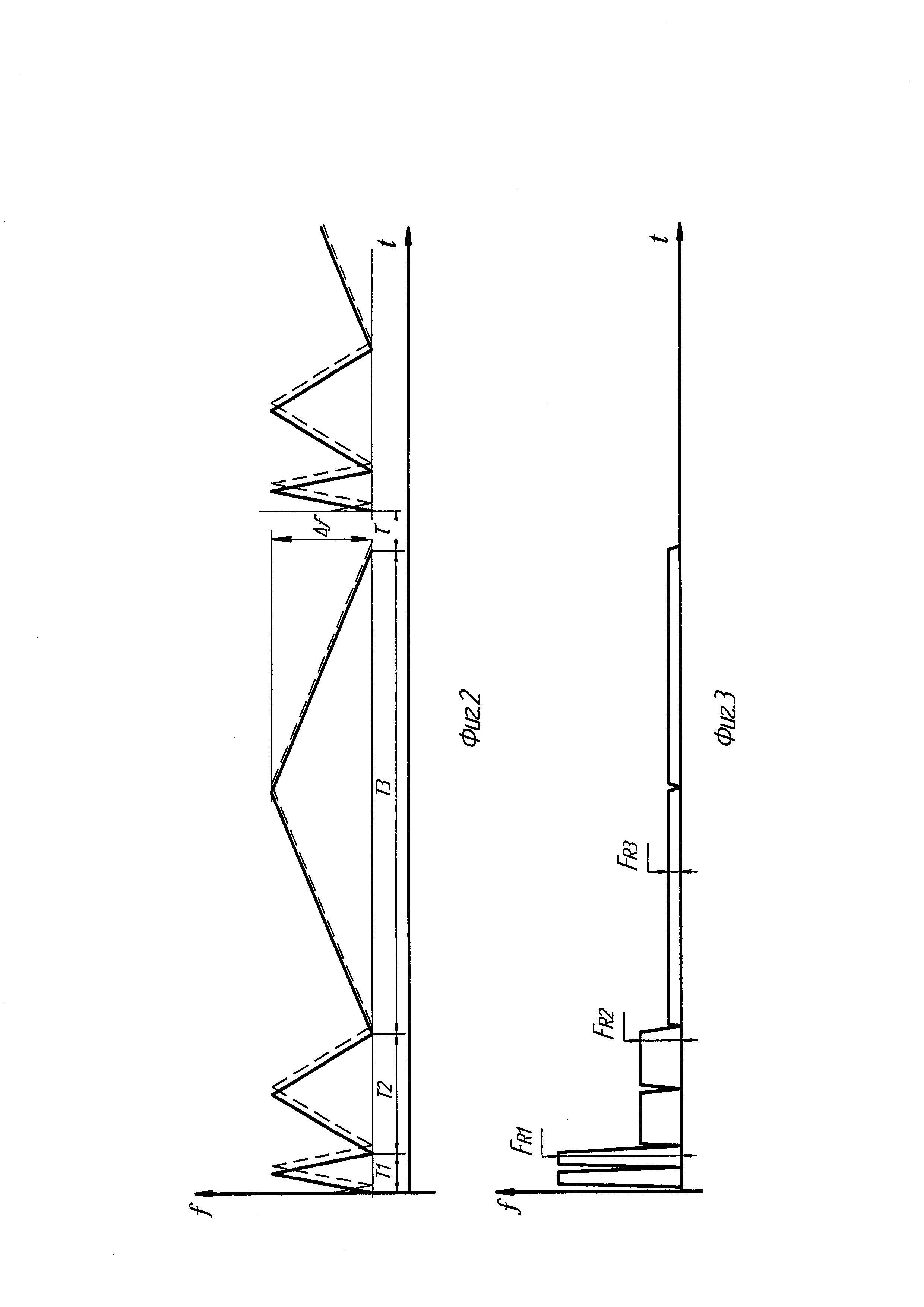
На фиг. 1 изображена структурная схема устройства предупреждения столкновений;
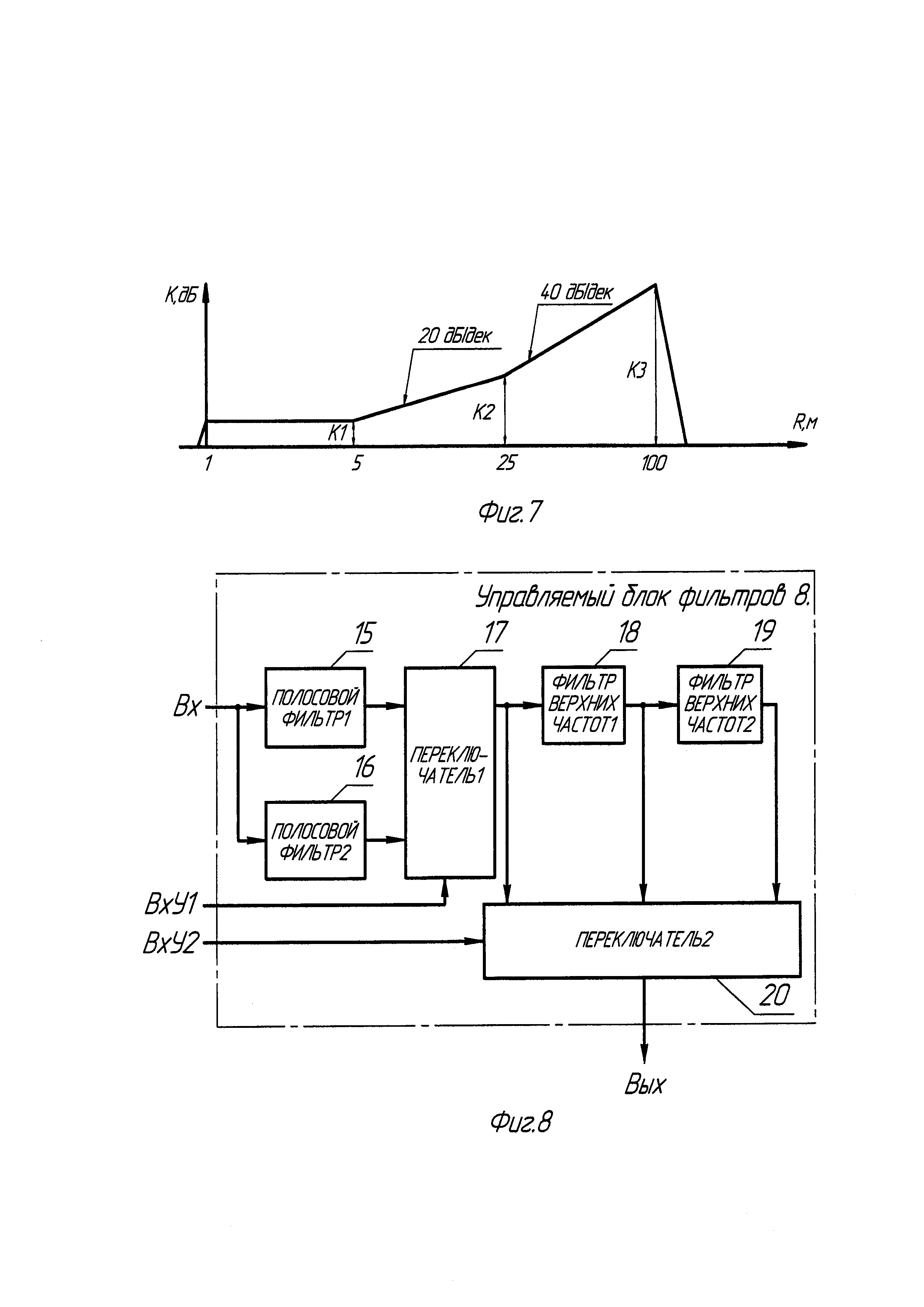
на фиг. 2 приведен вариант изменения частоты излучаемого и отраженного сигналов при делении рабочего диапазона дальностей на 3 поддиапазона;
на фиг. 3 изображены значения частоты биений в поддиапазонах от неподвижного препятствия, расположенного в 1-м поддиапазоне дальностей;
на фиг. 4 - фиг. 6 приведены амплитудно-частотные характеристики устройства в 1-3 поддиапазонах соответственно;
на фиг. 7 приведены коэффициенты передачи устройства в поддиапазонах в зависимости от расстояния;
на фиг. 8 приведена структурная схема варианта реализации блока фильтров с управляемой амплитудно-частотной характеристикой;
на фиг. 9 приведен вариант изменения частоты излучаемого сигнала с использованием в каждом поддиапазоне двух одинаковых периодов, отличающихся значением Δf.
Структурная схема устройства в соответствии с настоящим изобретением приведена на фиг. 1. Устройство содержит последовательно соединенные генератор модулирующего сигнала (ГМС) 1, генератор сверхвысоких частот (СВЧ) 2 с частотой, управляемой напряжением, направленный ответвитель (НО) 3, передающую антенну 4. Второй выход НО3 соединен с гетеродинным входом смесителя (СМ) 5 второй вход которого соединен с приемной антенной 6. С выхода СМ5 сигнал поступает на последовательно соединенные предварительный усилитель (ПУ) 7, управляемый блок фильтров (БФУ) 8 с изменяемой амплитудно-частотной характеристикой (АЧХ), управляемый усилитель (УУ) 9 с управляемым коэффициентом усиления и аналого-цифровой преобразователем (АЦП) 10. С выхода АЦП 10 оцифрованный сигнал подается для обработки в программируемый процессор (ПР) 11. ПРИ имеет функциональные связи с ГМС1 для управления частотой и амплитудой пилообразного напряжения, с БФУ8 - для управления АЧХ, с УУ9 - для изменения коэффициента усиления. В ПРИ поступает также информация с датчика собственной скорости (ДСС) 12 транспортного средства и информация от блока внешнего управления (БВУ) 13. ПРИ имеет выход для передачи информации в блок предупредительной сигнализации (БС) 14. Устройство излучает антенной 4 непрерывный частотно-модулированный сигнал с линейным пилообразным изменением частоты, поступающий через НОЗ с генератора СВЧ2, и принимает антенной 6 отраженный сигнал от объектов, расположенных в зоне обнаружения радара. СМ5 выделяет биения между частью излучаемого сигнала с НО3 и принятым сигналом, которые предварительно усиливаются ПУ7. Частота биений FR от неподвижного препятствия, расположенного на расстоянии R, равна:
где Δf - изменение частоты при модуляции;
С - скорость света;
TM - период модуляции.
Если W - скорость изменения частоты, то
При ограниченной максимальной рабочей частоте устройства значением Fσmax, скорость изменения частоты в i-м поддиапазоне Wi, обеспечивающая при максимальной дальности Rimax в поддиапазоне частоту биений, равную Fσmax, будет равна:
При данных значениях Wi выбор минимального расстояния в поддиапазонах Rimin должен обеспечивать выполнение условия:

где Fgmax - доплеровское смещение частоты при максимальном значении радиальной составляющей относительной скорости Vrmax;
λ - длина волны излучаемых колебаний.
На фиг. 2 показано изменение частоты излучаемого сигнала, обеспечиваемое соответствующим изменением пилообразного напряжения на выходе ГМС1, управляемого ПРИ. Сигнал с ГМС1 в ПРИ служит для синхронизации модулирующего сигнала и процесса обработки информации в ПРИ. В рассматриваемом примере рабочий диапазон дальности делится на 3 поддиапазона, в которых требуемая скорость изменения частоты устанавливается дискретным изменением периода модулирующего сигнала при постоянном значении Δf. Для анализа каждого поддиапазона в данном варианте используется по одному периоду модулирующего сигнала, при этом отношения 
 выбраны равными отношению
выбраны равными отношению  для обеспечения одинаковых границ поддиапазонов в частотной области. Штриховой линией обозначен отраженный сигнал от неподвижного объекта, расположенного в поддиапазоне минимальных дальностей, которому соответствует период Т1. Задержка т перед следующим циклом измерения используется для обработки данных, полученных в предыдущем цикле анализа поддиапазонов.
для обеспечения одинаковых границ поддиапазонов в частотной области. Штриховой линией обозначен отраженный сигнал от неподвижного объекта, расположенного в поддиапазоне минимальных дальностей, которому соответствует период Т1. Задержка т перед следующим циклом измерения используется для обработки данных, полученных в предыдущем цикле анализа поддиапазонов.
На фиг. 3 изображено изменение частоты биений от указанного выше объекта на выходе ПУ7 в процессе анализа поддиапазонов. Ограничение полосы сигнала, поступающего с ПУ7, для защиты от низкочастотных и высокочастотных помех, от наложения спектров при дискретизации сигнала в АЦП 10 и формирование заданной АЧХ в границах каждого поддиапазона обеспечиваются последовательно соединенными БФУ8 и УУ9. Дальнейшее рассмотрение будет проводиться при следующих характеристиках устройства: λ=4 мм, Δf=600 МГц, Fσmax=225 кГц, Vrmax=50 м/с.К первому поддиапазону в устройстве относятся расстояния от 1 до 5 м, ко второму - от 5 до 25 м и к третьему - от 25 до 100 м.
На фиг. 4 приведена АЧХ для первого поддиапазона. В АЧХ второго поддиапазона, приведенной на фиг. 5, для компенсации ослабления отраженного сигнала предусмотрен подъем 20 дБ/дек, а в АЧХ третьего поддиапазона на фиг. 6 - 40 дБ/дек. Граница полос пропускания фильтров в поддиапазонах расширена относительно значений FRmin и FRmax на величину максимального доплеровского сдвига частоты. Выравнивание коэффициентов усиления в конце предыдущего поддиапазона и в начале следующего, изменение общего коэффициента усиления обеспечивается УУ9 командами с ПР11.
При выбранных значениях Т1=2⋅10-4 с; Т2=10-3 с; Т3=5⋅10-3 с во всех поддиапазонах обеспечивается превышение FRmin=40 кГц над доплеровским смещением частоты Fgmax=25 кГц.
На фиг. 7 приведена зависимость коэффициента передачи устройства от анализируемого расстояния.
При необходимости дополнительного увеличения минимальной частоты в поддиапазонах количество поддиапазонов может быть увеличено соответствующими изменениями в модулирующем сигнале и АЧХ устройства.
Вариант исполнения БФУ8 приведен на фиг. 8. БФУ8 содержит первый полосовой фильтр 15 и второй полосовой фильтр 16, входы которых соединены и образуют вход БФУ8, а выходы соединены с входами первого переключателя 17. Выход первого переключателя 17 соединен с входом первого фильтра верхних частот 18 и первым входом второго переключателя 20. Выход первого фильтра верхних частот 18 соединен с входом второго фильтра верхних частот 19 и вторым входом второго переключателя 20, третий вход которого соединен с выходом второго фильтра верхних частот 19, а выход второго переключателя 20 является выходом БФУ8. Управляющие входы ВхУ1, ВхУ2 переключателей 17 и 20 являются входами управления БФУ8.
При работе в первом поддиапазоне управляющими сигналами на ВхУ1 и ВхУ2 обеспечивается прохождение на выход БФУ8 через переключатели 17 и 20 сигнала с полосового фильтра 15, полоса пропускания которого соответствует приведенной на фиг. 4. При последующей работе во втором поддиапазоне на выход БФУ8 коммутируется сигнал, прошедший последовательно через полосовой фильтр 15 и фильтр верхних частот 18. Фильтр верхних частот 18 имеет в полосе пропускания фильтра 15 подъем АЧХ с наклоном 20 дБ/дек для частичной компенсации затухания отраженного сигнала. Результирующая полоса пропускания и наклон АЧХ в данном поддиапазоне соответствуют фиг. 5. В третьем поддиапазоне сигнал на выход БФУ8 проходит через полосовой фильтр 16, фильтр верхних частот 18 и второй фильтр верхних частот 19, имеющий подъем АЧХ, равный 20 дБ/дек.
Результирующая полоса пропускания в данном поддиапазоне и подъем АЧХ соответствуют фиг. 6. В зависимости от характеристик и условий работы устройства вид АЧХ в поддиапазонах может изменяться, в том числе и в процессе анализа сигналов.
Выравнивание коэффициентов усиления в конце предыдущего и начале следующего поддиапазонов осуществляется изменением усиления УУ9. Сигнал с выхода УУ9 поступает в АЦП10. Оцифрованные в каждом полу периоде модулирующего сигнала данные считываются ПР11, который вычисляет с каждыми из них быстрое преобразование Фурье. По результатам анализа данных, полученных в частотной области в каждом поддиапазоне, ПР11 определяет расстояние и относительную скорость с препятствием с учетом того, что на нарастающем участке пилообразного изменения частоты модуляции, при сближении с препятствием, частота биений равна:
а на спадающем участке:
где  - доплеровский сдвиг частоты от радиальной составляющей Vr относительной скорости.
- доплеровский сдвиг частоты от радиальной составляющей Vr относительной скорости.
С использованием данных о расстоянии до препятствия, относительной скорости, данных о собственной скорости Vo, получаемых с ДСС12, вычисляются пороговые расстояния Rп о необходимости снижения скорости, торможения из выражения:

где Тр - время реакции системы для изменения скорости Vo;
Vп - скорость препятствия;
ао и ап - ускорение транспортного средства с устройством и препятствия;
Ro - запас на дистанцию для включения предупреждения о необходимости снижения скорости перед торможением.
Определение пороговых дистанций проводится с учетом информации от БВУ13, которая учитывает изменение Тр, Ro, длину выступающей вперед радара части транспортного средства. По результатам сравнения полученной дальности с пороговыми значениями в БС14 передается информация для включения соответствующих предупредительных сигналов.
В рассмотренном варианте устройства для анализа каждого поддиапазона используется один период модулирующего сигнала. Для повышения достоверности получаемой информации может использоваться вариант модуляции, приведенный на фиг. 9, где в каждом поддиапазоне используются для модуляции по два одинаковых периода, отличающихся амплитудой изменения частоты.
Устройство изготовлено с использованием элементной базы, выпускаемой промышленностью, и конструктивно содержит приемо-передающее устройство 4-мм диапазона радиоволн, блок обработки поступающего со смесителя сигнала биений и блок питания. В БФУ8 полосовые фильтры и фильтры верхних частот выполнены с использованием звеньев активных фильтров на операционных усилителях серии 544, схемы которых приведены в книге Л. Фолкенберри, Применения операционных усилителей и линейных ИС, под ред. М.В. Гальперина, М., «Мир», 1985 г. В качестве переключателей использованы микросхемы серии 1526.
УУ9 может быть реализован на операционном усилителе серии 154 с использованием вместо одного из резисторов, определяющих усиление, цифрового потенциометра серии 1272 (зарубежный аналог DS1267).
ГМС1 может быть выполнен по схеме, приведенной в книге Л. Фолкенберри, Применения операционных усилителей и линейных ИС, под ред. М.В. Гальперина, М., «Мир», 1985 г, стр. 255, с использованием цифровых потенциометров серии 1272 для управления частотой и амплитудой пилообразного напряжения. Для цифровой обработки сигнала и проведения необходимых вычислений применена однокристальная микро-ЭВМ 1986 ВЕ91Т, включающая в свой состав и АЦП10.
Электрогидравлическая система управления
Электрогидравлический привод
Электрогидравлическая система управления поворотным кольцом стартового ракетного комплекса
Система наведения и стабилизации пакета направляющих боевой машины реактивной системы залпового огня
Электрогидравлическая система управления
Система наведения и стабилизации пакета направляющих боевой машины реактивной системы залпового огня
Электрогидравлический привод
Электрогидравлическая система управления
Электрогидравлический привод
Аппаратура наземной навигации
Аппаратура наземной навигации

