Результат интеллектуальной деятельности: ВПЕРЕДСМОТРЯЩИЙ ГИДРОЛОКАТОР ГЛУБОКОВОДНОГО НОСИТЕЛЯ
Вид РИД
Изобретение
Изобретение относится к многоканальным гидроакустическим системам и может быть использовано для мониторинга подводной обстановки по ходу движения подводного носителя, обнаружения в заданном секторе потенциально опасных для навигации препятствий, а также для определения уточненной дальности, радиальной скорости и направления движения подводных движущихся объектов.
Известны близкие по назначению многоканальные гидроакустические системы и устройства, предназначенные для мониторинга подводной обстановки.
В патенте США №5390152 от 14.02.1995 г. [1] описан впередсмотрящий эхолот, в состав которого входит несканирующая антенна переднего обзора, которая формирует последовательность звуковых сигналов, принимает эхосигналы, отраженные от объектов, расположенных вдоль центральной оси характеристики направленности (ХН) антенны. По принятым эхосигналам определяется дистанция до препятствия, при вычислении дальности учитывается скорость судна, измеряемая датчиком собственной скорости, и угол наклона луча. Полученные результаты выводятся на экран устройства отображения в квазиреальном масштабе времени.
В этом устройстве отсутствует возможность определения скорости и направления движения объекта.
В патенте США №6842401 В2 от 11.01.2005 г. [2] описана гидроакустическая система, содержащая гидролокатор переднего обзора, предназначенная для использования в системах обзора подводной обстановки и обнаружения подводных препятствий. В данном устройстве использована высокочастотная многоэлементная криволинейная приемная антенная решетка (АР), совместно с двумя отдельными излучателями, один из которых излучает строго в направлении вперед для обнаружения препятствий впереди по ходу судна, другой - под углом скольжения для заполнения пропусков при выполнении обзора. Результаты обзора отображаются на экране дисплея.
Рассмотренное устройство обладает теми же недостатками, заключающимися в том, что в нем отсутствует техническое решение, позволяющее гидролокатору определять радиальную скорость и направления движения подводных движущихся объектов.
В патенте США №8203909 В1 от 19.06.2012 г. [3] описан способ и устройство для обнаружения и определения местоположения подводных препятствий на пути следования судна или лодки. Устройство имеет в своем составе излучатель импульсов с широким углом обзора. Управление осуществляется цифровым сигнальным процессором. Отраженные от подводных препятствий эхосигналы поступает в одномерный преобразователь интенсивности звукового сигнала, который преобразует их и передает в цифровой сигнальный процессор. Процессор осуществляет обработку принятых эхосигналов и на их основе формирует гидроакустический профиль дна в зоне перед судном, определяет местоположение затопленных препятствий или подводных объектов впереди судна.
Это устройство также не позволяет определять параметры движущихся объектов на пути следования носителя.
Наиболее близким к заявляемому изобретению по структуре и выполняемым функциям является многоканальный локатор препятствий (ЛП), описанный в [4]. Выберем его в качестве прототипа.
Принцип работы ЛП заключается в формировании цифровыми методами широкополосных сложных зондирующих сигналов с внутриимпульсной линейной частотной модуляцией (ЛЧМ) в излучающем тракте и статического веера ХН в приемном тракте с целью обеспечения оперативности обзора подводной обстановки по ходу движения носителя. Известно, что применение широкополосных ЛЧМ зондирующих сигналов позволяет повысить в ЛП одновременно дальность обнаружения подводных объектов и точность измерения дистанции до них.
Алгоритм работы многоканального ЛП представлен в виде структурной схемы, приведенной на фиг. 1, состоящей из следующих блоков:
- аналого-цифровые преобразователи (АЦП) в каждом i-том входном элементарном канале (0≤i≤Ne-1; Ne - количество входных элементарных каналов);
- цифровые формирователи квадратурных составляющих (ЦФКС) в каждом i-том входном элементарном канале, содержащие умножитель на комплексную последовательность, два цифровых фильтра низких частот и два устройства децимации отсчетов сигнала [5, 6];
- объединенные фильтры (ОФ) в каждом i-том входном элементарном канале, содержащие согласованный фильтр (СФ) ЛЧМ эхосигнала, реализуемый во временной области с помощью нерекурсивного цифрового фильтра с конечной импульсной характеристикой, цифровой фильтр (ЦФ) с заданной амплитудно-частотной характеристикой (АЧХ), необходимый для весовой обработки сигналов в частотной области, и дециматор, позволяющий дополнительно снизить частоту следования выходных отсчетов [5];
- формирователь характеристики направленности (ФХН), реализованный во временной области с помощью умножителя на комплексные коэффициенты и сумматора [7], совмещенный с весовой обработкой (ВО) в пространственной области. Входные каналы ФХН подключены к Ne выходам ОФ, а выходы ФХН представляют собой выходы NB пространственных каналов;
- вычислители модулей (ВМ), осуществляющие вычисление огибающих сигналов в каждом m-ном пространственном канале (0≤m≤NB-1; NB - количество выходных пространственных каналов);
На фиг. 1 приняты дополнительно следующие обозначения:
- xi(t) - аналоговый сигнал i-го входного элементарного канала (0≤i≤Ne-1);
- xi(nT) - временная последовательность отсчетов i-го входного элементарного канала (0≤i≤Ne-1);
-  - временная последовательность отсчетов комплексной огибающей (КО) сигнала в i-м входном канале (0≤i≤Ne-1);
- временная последовательность отсчетов комплексной огибающей (КО) сигнала в i-м входном канале (0≤i≤Ne-1);
-  - последовательность отсчетов выходного сигнала ОФ i-го входного элементарного канала (0≤i≤Ne-1);
- последовательность отсчетов выходного сигнала ОФ i-го входного элементарного канала (0≤i≤Ne-1);
-  - последовательность отсчетов выходного сигнала ФХН m-го пространственного канала (0≤m≤NB-1);
- последовательность отсчетов выходного сигнала ФХН m-го пространственного канала (0≤m≤NB-1);
- Mm(nT2) - последовательность отсчетов модуля выходного сигнала m-го пространственного канала (0≤m≤NB-1).
Принцип работы ЛП ясен из приведенной структурной схемы. Отраженный от препятствия эхосигнал принимается антенной решеткой, состоящей из Ne элементарных каналов, в каждом из которых образуется входной элементарный сигнал. Принятый сигнал усиливается и оцифровывается, затем производится его первичная цифровая обработка в каждом канале и формирование ХН в заданном секторе обзора. Далее вычисляются огибающие сигналов в выходных пространственных каналах, по которым строится изображение подводной обстановки по ходу движения носителя.
Прототип обладает теми же недостатками, что и рассмотренные аналоги. В прототипе нет технического решения, позволяющего формировать информацию о параметрах движения объекта в зоне обзора, то есть получать технический результат системы - осуществлять обнаружение подводных объектов в заданном секторе обзора с одновременным определением скорости и направления движения. Следует отметить, что при использовании зондирующих ЛЧМ сигналов неизвестная скорость движения обнаруживаемого объекта будет давать дополнительную погрешность в измерении дальности.
Предлагаемое изобретение направлено на преодоление указанных недостатков прототипа и аналогов.
В основу изобретения поставлена задача обеспечения технического результата, заключающегося в создании впередсмотрящего гидролокатора (ВСГЛ) глубоководного носителя, позволяющего одновременно с обнаружением подводных движущихся объектов в заданном секторе обзора определять их уточненную дальность, радиальную скорость и направление движения.
Указанный технический результат достигается тем, что в описанный прототип, который имеет многоканальный вход, содержит подключенные к каждому входному каналу последовательно соединенные АЦП, ЦФКС и ОФ, выходы которых соединены с соответствующими входами многоканального ФХН, выходы которого подключены ко входам ВМ пространственных каналов, введены в каждый пространственный канал определитель моментов максимумов (ОММ) и вычислитель параметров объектов (ВПО), соединенные так, что в каждом пространственном канале выход ВМ соединен со входом ОММ, выход которого подключен ко входу ВПО, выходы которого являются выходами ВСГЛ глубоководного носителя соответствующего пространственного канала, и дополнительный управляющий вход, подключенный ко вторым входам ОФ и вторым входам ВПО в каждом пространственном канале, а также использована последовательность зондирующих сигналов с ЛЧМ и изменяющимся знаком девиации частоты.
Благодаря введению в известный ЛП совокупности существенных отличительных признаков, предлагаемый ВСГЛ обеспечивает возможность осуществлять обнаружение движущихся подводных объектов в заданном секторе обзора с одновременным определением их уточненной дальности, скорости и направления движения.
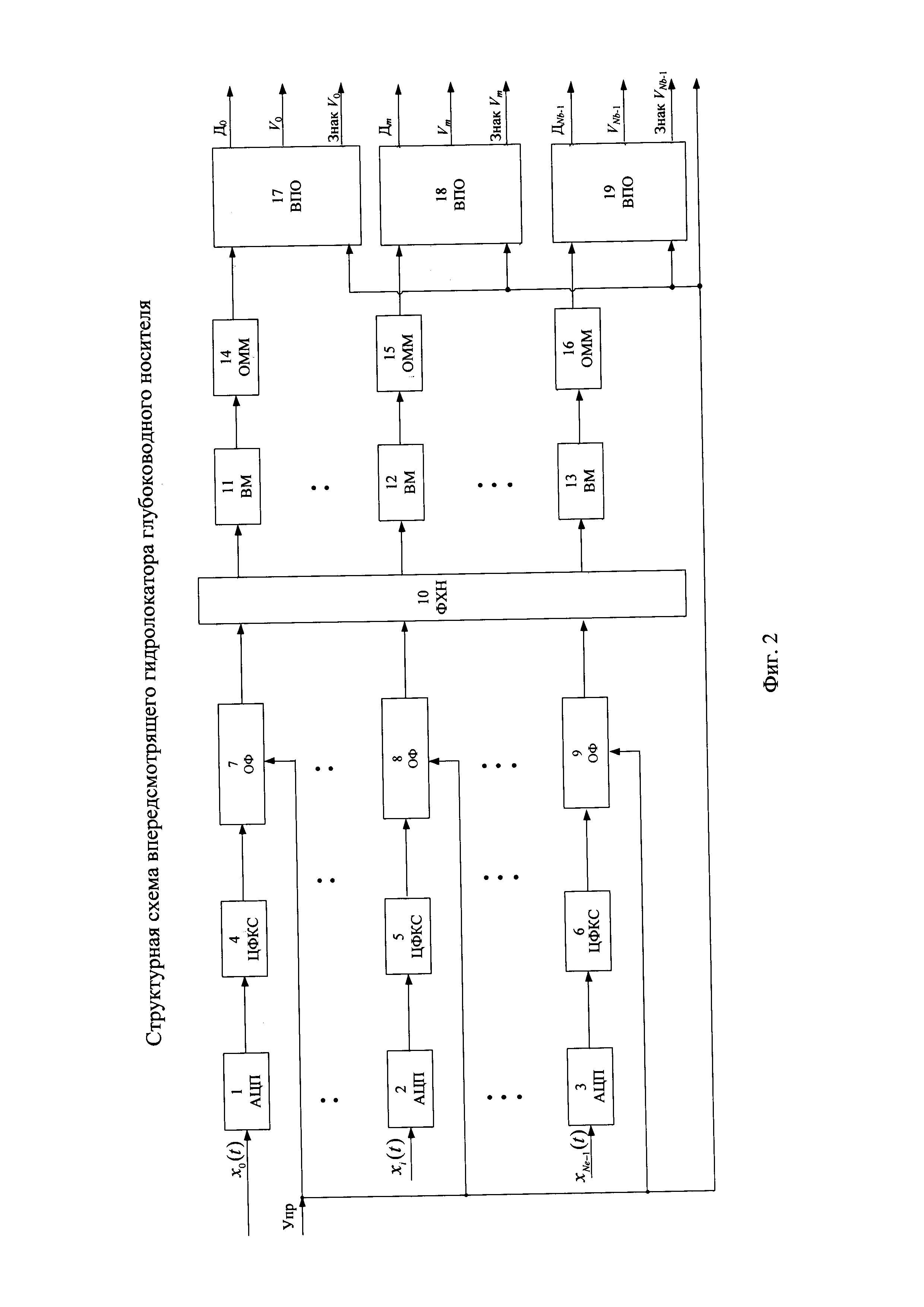
Сущность предлагаемого изобретения поясняется структурной схемой, приведенной на фиг. 2, где обозначено:
1, 2, 3 - аналого-цифровые преобразователи сигналов входных каналов (0≤i≤Ne-1);
4, 5, 6 - цифровые формирователи квадратурных составляющих сигналов входных каналов (0≤i≤Ne-1);
7, 8, 9 - объединенные фильтры отсчетов сигналов входных каналов (0≤i≤Nе-1);
10 - формирователь характеристики направленности с весовой обработкой в пространственной области;
11, 12, 13 - вычислители модулей отсчетов сигналов пространственных каналов (0≤m≤NB-1);
14, 15, 16 - определители моментов максимума отсчетов сигналов пространственных каналов (0≤m≤NB-1);
17, 18, 19 - вычислители параметров объектов пространственных каналов (0≤m≤NB-1);
ВСГЛ глубоководного носителя с уточненным измерением дальности, радиальной скорости и направления движения подводных объектов работает следующим образом.
Принятые в Ne входных каналах аналоговые эхосигналы x(t), представляющие собой периодические последовательности ЛЧМ радиоимпульсов с череспериодным изменением знака девиации частоты, преобразовываются в каждом из Nе АЦП 1, 2, 3 в отсчеты x(nT) с частотой дискретизации Т и подаются в Ne ЦФКС 4, 5, 6, устройство и принцип работы которых подробно описаны в [5, 6]. В ЦФКС 4, 5, 6 отсчеты сигнала преобразуются в отсчеты  КО входного сигнала с периодом дискретизации Т1.
КО входного сигнала с периодом дискретизации Т1.
Отсчеты КО каждого из Ne входного канала поступают в ОФ 7, 8, 9, реализующие функции СФ и ЦФ, структура которых описана в [5]. При этом, во время четных зондирований сигналы  , подаются в СФ с передаточной функцией H1(k) для согласованной обработки ЛЧМ сигналов с положительным знаком девиации частоты, а при нечетных зондированиях эхосигналы
, подаются в СФ с передаточной функцией H1(k) для согласованной обработки ЛЧМ сигналов с положительным знаком девиации частоты, а при нечетных зондированиях эхосигналы  , поступают в СФ с передаточной функцией H2(k) для согласованной обработки ЛЧМ сигналов с отрицательной девиацией частоты. Передаточные функции H1(k) и H2(k) хранятся в памяти устройства и по сигналу управления используются в ОФ 7, 8, 9. После ЦФ над выходными сигналами выполняется операция децимации, снижающая частоту следования отсчетов до Т2.
, поступают в СФ с передаточной функцией H2(k) для согласованной обработки ЛЧМ сигналов с отрицательной девиацией частоты. Передаточные функции H1(k) и H2(k) хранятся в памяти устройства и по сигналу управления используются в ОФ 7, 8, 9. После ЦФ над выходными сигналами выполняется операция децимации, снижающая частоту следования отсчетов до Т2.
Выходные сигналы ОФ 7, 8, 9  поступают в ФХН 4. Процедура ФХН выполняется фазовым методом, который заключается в компенсации разностей фаз выходных сигналов ее элементов, возникающих из-за задержки моментов поступления фронта принимаемой волны на эти элементы. При этом формирование каждого из лучей сводится к суммированию отсчетов КО выходных сигналов всех элементов с комплексными весовыми коэффициентами и результатом формирования ХН (выходным сигналом в каждом из NB пространственных каналов) является дискретный сигнал в виде последовательности комплексных отсчетов
поступают в ФХН 4. Процедура ФХН выполняется фазовым методом, который заключается в компенсации разностей фаз выходных сигналов ее элементов, возникающих из-за задержки моментов поступления фронта принимаемой волны на эти элементы. При этом формирование каждого из лучей сводится к суммированию отсчетов КО выходных сигналов всех элементов с комплексными весовыми коэффициентами и результатом формирования ХН (выходным сигналом в каждом из NB пространственных каналов) является дискретный сигнал в виде последовательности комплексных отсчетов  Процедура ФХН выполняется одновременно с ВО по пространству для уменьшения уровня боковых лепестков в ХН.
Процедура ФХН выполняется одновременно с ВО по пространству для уменьшения уровня боковых лепестков в ХН.
Затем в ВМ 11, 12, 13 вычисляются модули выходных сигналов всех пространственных каналов M(nT2).
Отсчеты модулей сигналов M(nT2) в каждом пространственном канале поступают на входы ОММ 14, 15, 16, содержащие пороговые устройства, необходимые для принятия решения об обнаружении объектов, и определяющие моменты запаздывания максимальных сигналов огибающих nмакс0T2 и nмакс1Т2, поступивших в четных и нечетных периодах зондирования соответственно.
Измеренные значения запаздывания nмакс0Т2 и nмакс1Т2 поступают в каждом пространственном канале в соответствующий ВПО 17, 18, 19.
Известно [8, 9], что при отражении ЛЧМ сигнала от движущейся цели, имеющей радиальную скорость νR относительно антенны, максимум амплитудной огибающей сжатого сигнала имеет запаздывание

где ΔtD - запаздывание, определяемое расстоянием до цели;
Δtν - запаздывание, определяемое радиальной скоростью.

где DR - дальность до цели;
с - скорость распространения сигнала.

где τи - длительность импульса;
Δƒд - девиация частоты ЛЧМ сигнала;
 - длина волны излучаемого сигнала;
- длина волны излучаемого сигнала;
ƒ0 - несущая частота излучаемого сигнала;
 - радиальная скорость цели (скорость положительная, если цель удаляется).
- радиальная скорость цели (скорость положительная, если цель удаляется).
Из выражения (3) следует, что знак смещения ΔtV максимума амплитудной огибающей сжатого сигнала относительно момента ΔtD определяется знаком νR и знаком Δƒ.
Оценку уточненной дальности до объекта можно определить по выражению

Так как девиации частот ЛЧМ импульсов в четных и нечетных периодах зондирования равны по модулю и противоположны по знаку, то выражение (4) соответствует запаздыванию ΔtD, равному среднему значению запаздываний максимальных значений откликов СФ соседних зондирований и не содержит ошибки, обусловленной движением подводного объекта.
Из выражения (3) следует, что модуль радиальной скорости движущейся цели можно найти следующим образом:

Из выражения (5) также следует что, если радиальная скорость объекта положительна (объект удаляется), то максимум сигнала в нечетном периоде излучения будет позже во времени, чем максимум в четном периоде излучения (nмакс1T2>nмакс0Т2), и наоборот, если радиальная скорость отрицательна (объект приближается), то максимум сигнала в нечетном периоде излучения будет опережать максимум в четном периоде (nмакс1T2<nмакс0T2). Таким образом, в нечетном периоде излучения знак радиальной скорости подводного объекта, характеризующий его направление движения, будет всегда соответствовать знаку разности (nмакс1-nмакс0).
В ВПО в соответствии с командами управления в нечетные периоды излучения ЛЧМ сигналов формируется знак скорости «+», если разность (nмакс1-nмакс0) положительная (объект удаляется) или знак скорости «-», если разность (nмакс1-nмакс0) отрицательная (объект приближается).
Таким образом, изобретение представляет собой ВСГЛ глубоководного носителя, обеспечивающий уточненное измерение дальности, радиальной скорости и направления движения подводных объектов.
Источники информации:
1. Пат. 5390152 США, МПК G01S 15/89, Forward looking echosounder; Заявлено 18.11.1993; Опубл. 14.02.1995.
2. Пат. 6842401 В2 США, МПК Н04В 1/02, Sonar beamforming system; Заявлено 19.07.2001; Опубл. 11.01.2005.
3. Пат. 8203909 В1 США, МПК G01S 15/88, Forward-looking sonar for ships and boats; Заявлено 10.05.2010; Опубл. 19.07.2012.
4. Маркович И.И. Методы и алгоритмы цифровой пространственно-временной обработки гидроакустических сигналов в многолучевых эхолотах и локаторах препятствий // Фундаментальная и прикладная гидрофизика - СПб: Наука, 2014. - Т. 7. - №2. - С. 58-71.
5. Маркович И.И. Цифровая обработка сигналов в системах и устройствах: монография. - Ростов н/Д: Изд-во ЮФУ, 2012. - 236 с.
6. Маркович И.И. Реализация алгоритмов цифрового формирования квадратурных составляющих в локационных комплексах различного назначения // Вестник компьютерных и информационных технологий. - 2006. - №6. - С. 16-21.
7. Найт У.С., Придэм Р.Г., Кэй С.М. Цифровая обработка сигналов в гидролокационных системах // ТИИЭР. 1981. - Т. 69, - №11. - С. 84-155.
8. Ч. Кук, М. Бернфельд Радиолокационные сигналы. Пер. с английского под ред. B.C. Кельзона. - М.: Советское радио, 1971. - 568 с.
9. Маркович И.И., Копытин А.С., Марьев А.А. Цифровая обработка сигналов в радиолокационном комплексе, использующем зондирующие сигналы с линейной частотной модуляцией и изменяющимся знаком девиации частоты. Суперкомпьютерные технологии (СКТ-2014) // Материалы 3-й Всероссийской науч.-тех. конф. в 2 т. - Ростов-на Дону: Изд-во ЮФУ, 2014.- 272 с. - С. 235-239.
Впередсмотрящий гидролокатор глубоководного носителя, имеющий многоканальный вход, содержит подключенные к каждому входному каналу последовательно соединенные аналого-цифровые преобразователи, цифровые формирователи квадратурных составляющих и объединенные фильтры, выходы которых соединены с соответствующими входами многоканального формирователя характеристик направленности, выходы которого подключены ко входам вычислителей модулей пространственных каналов, отличающийся тем, что с целью повышения точности измерения дальности до движущихся подводных объектов и определения их скорости и направления движения введены в каждый пространственный канал определитель моментов максимумов и вычислитель параметров объектов, соединенные так, что в каждом пространственном канале выход вычислителя модуля соединен со входом определителя момента максимума, выход которого подключен ко входу вычислителя параметров объектов, выходы которого являются выходами впередсмотрящего гидролокатора глубоководного носителя соответствующего пространственного канала, и дополнительный управляющий вход, подключенный ко вторым входам объединенных фильтров и вторым входам вычислителей параметров объектов в каждом пространственном канале, а также использована последовательность зондирующих сигналов с линейной частотной модуляцией и изменяющимся знаком девиации частоты.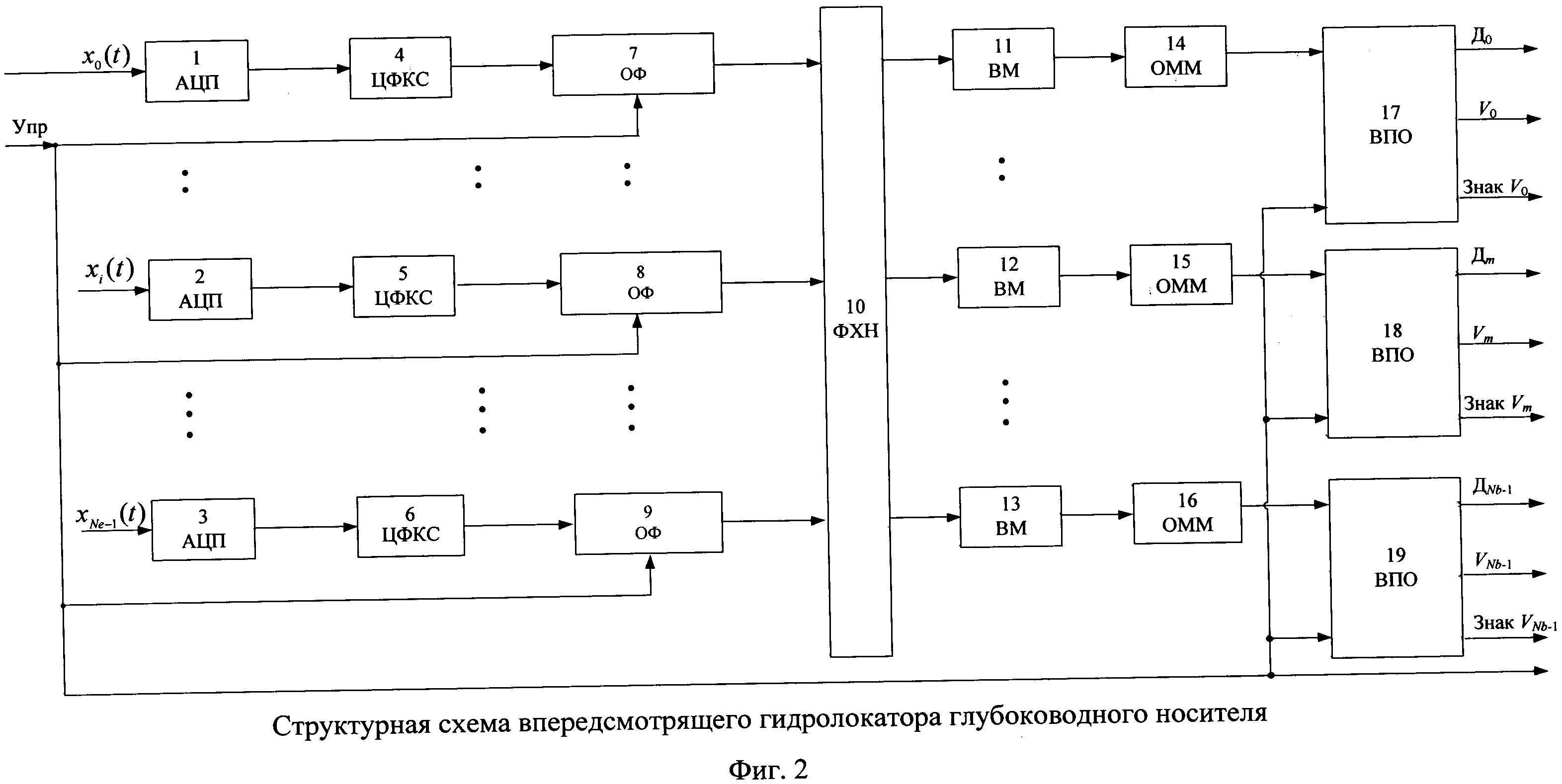

Устройство для подъема объектов со дна моря на подводное техническое средство
Седло регулятора расхода горячего газа
Способ формирования прогноза погодных явлений в режиме реального времени и система для его осуществления
Способ построения приёмопередающего модуля активной фазированной антенной решётки
Устройство для охлаждения и термостатирования элементов радиоэлектронной аппаратуры радиолокационных станций с использованием плавящихся тепловых аккумуляторов с дополнительным воздушно-жидкостным теплоотводом
Интеллектуальная система преобразования напряжения постоянного тока для динамически изменяющейся нагрузки
Механизм подъема
Устройство для полунатурного моделирования системы управления летательного аппарата с активными головками самонаведения
Способ управления системой электропитания космического аппарата повышенной живучести
Система бесперебойного питания
Способ сигнализации приводнения и взлета с водной поверхности самолета-амфибии
Способ сигнализации приводнения и взлета с водной поверхности самолета-амфибии и устройство для его осуществления
Система селекции движущихся целей с измерением дальности, радиальной скорости и направления движения
Устройство цифровой обработки сигналов в импульсно-доплеровской рлс с компенсацией чм доплеровских сигналов
Устройство цифровой обработки сигналов в импульсно-доплеровской рлс с компенсацией миграции целей по дальности
Способ цифровой обработки сигналов в импульсно-доплеровской рлс с высокой частотой повторения и устройство для его осуществления

