Результат интеллектуальной деятельности: СИСТЕМА СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ С ИЗМЕРЕНИЕМ ДАЛЬНОСТИ, РАДИАЛЬНОЙ СКОРОСТИ И НАПРАВЛЕНИЯ ДВИЖЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области радиолокации и может быть использовано в радиолокационных системах (РЛС) для селекции движущихся целей с измерением их дальности, радиальной скорости и направления движения.
Известны близкие по назначению способы и устройства селекции движущихся целей, предназначенные для подавления отражений от неподвижных или медленно движущихся объектов (земной поверхности, метеообразований и др.) в активных радиолокационных системах.
В патенте США US 3225349 A от 21.12.1965 [1] описана РЛС селекции движущихся целей (СДЦ), в которой формируется группа из двух импульсов с линейной частотной модуляцией (ЛЧМ), имеющих противоположные знаки девиации частоты. Эта группа излучается в направлении на цель. Отраженный сигнал принимается, усиливается, разделяется на два канала и подается на согласованные фильтры. Каждый из фильтров согласован с одним из двух излучаемых импульсов. Согласованный с фильтром импульс формирует сжатый отклик согласованного фильтра, в то время как несогласованный импульс получает дополнительную фазовую дисперсию и его энергия распределяется на интервале равном удвоенной исходной длительности. После этого сигнал одного канала проходит линию задержки для выравнивания временного положения импульсов в группе. В случае, если группа импульсов отразилась от движущейся цели, вершины сжатых импульсов сдвигаются по времени в разные стороны от момента, определяемого дальностью до цели, причем этот сдвиг является функцией доплеровской частоты с учетом знака девиации частоты зондирующего сигнала. Если группа импульсов отразилась от неподвижной цели, вершины сжатых импульсов не смещаются относительно друг друга и момента времени, определяемого дальностью до цели. Далее сигналы подаются на вычитающее устройство. Если цель подвижна, то на выходе устройства будет присутствовать разностный сигнал, представляющий собой сдвинутые во времени относительно друг друга сжатые отклики согласованных фильтров разной полярности, которые в дальнейшем могут использоваться для определения скорости и дальности цели. В случае неподвижной цели сигнал на выходе вычитающего устройства равен нулю.
Описанная РЛС с СДЦ обладает рядом существенных недостатков.
Увеличенное время излучения, определяемое длительностью излучаемой пачки, равной двум длительностям ЛЧМ сигналов и интервалу между ними, ограничивает минимальную дальность, на которой могут обнаруживаться движущиеся цели.
В патенте указано, что с помощью дополнительной обработки возможно определение дальности, скорости и направления движения цели, однако это не подтверждено описанием соответствующего алгоритма и структурой устройства. Таким образом, в патенте не приведено решение, позволяющее устройству одновременно измерять дальность, скорость и направление движения цели.
В патенте на изобретение СССР SU 738450 от 19.04.1977 [2] описывается устройство для обработки радиолокационных сигналов, входящее в состав системы с СДЦ, в которой ведется излучение и прием пачки ЛЧМ импульсов с чередованием знака девиации частоты. Принцип одновременной оценки скорости и дальности до цели аналогичен рассмотренному в патенте US 3225349 A. Функционирование устройства отличается от описанного в патенте US 3225349 A тем, что используется промежуточное накопление квадратурных составляющих пачки сигналов и измерения проводятся после окончания пачки.
Рассмотренное устройство обладает теми же недостатками, заключающимися в том, что в нем отсутствует техническое решение, позволяющее системе СДЦ определять дальность, скорость и направление движения цели.
Известно техническое решение, описанное в патенте США US 5870054 A от 09.02.1999 [3], в котором рассмотрена РЛС с СДЦ с компенсацией эффекта «слепых скоростей», базовый принцип работы которой не отличается от рассмотренных выше. В системе, описанной в патенте US 5870054 A, используется ЛЧМ сигнал с череспериодным изменением знака девиации частоты. Это позволяет уменьшить мертвую зону РЛС. Интервал между импульсами на выходе вычитающего устройства огибающих сжатых импульсов прямо пропорционален скорости цели, а истинное расстояние до цели соответствует среднему значения запаздывания между импульсами.
Однако описанное в патенте US 5870054 A устройство имеет те же недостатки, заключающиеся в отсутствии описания технического решения, позволяющего измерять дальность и скорость движущейся цели, а также определять ее направление движения, что чрезвычайно важно в реальной оперативной обстановке.
Наиболее близким к заявляемому изобретению по наличию сходных признаков является техническое решение, описанное в статьях [4, 5]. Выберем его в качестве прототипа.
В рассматриваемой системе СДЦ, выделяющей сигналы движущихся целей на фоне отражений от местных предметов или пассивных помех, обрабатываются ЛЧМ сигналы, в которых меняется знак девиации внутриимпульсной частотной модуляции от импульса к импульсу. В этом случае в нечетных и четных периодах повторения эхосигналы от движущихся целей будут смещены относительно истинного значения дальности в положительную или в отрицательную сторону. Величина этого временного сдвига прямо пропорциональна доплеровскому сдвигу частоты ЛЧМ сигнала, а коэффициент пропорциональности равен отношению длительности зондирующего сигнала к его девиации. Сигналы, отражённые от неподвижных и малоподвижных объектов, практически не будут отличаться по задержке и могут быть скомпенсированы путем взаимного попарного вычитания продетектированных сжатых сигналов. Результаты попарных вычитаний для каждого элемента дальности можно накапливать некогерентно. Возможность выделения сигналов движущихся целей при попарном межпериодном вычитании обусловлена смещением сжатых сигналов по времени запаздывания (дальности) в противоположные стороны относительного истинного значения. По интервалу времени между моментами обнаружения двух эхосигналов от каждой цели можно вычислить ее уточненную дальность DR и радиальную скорость VR, а по знакам эхосигналов - направление движения.
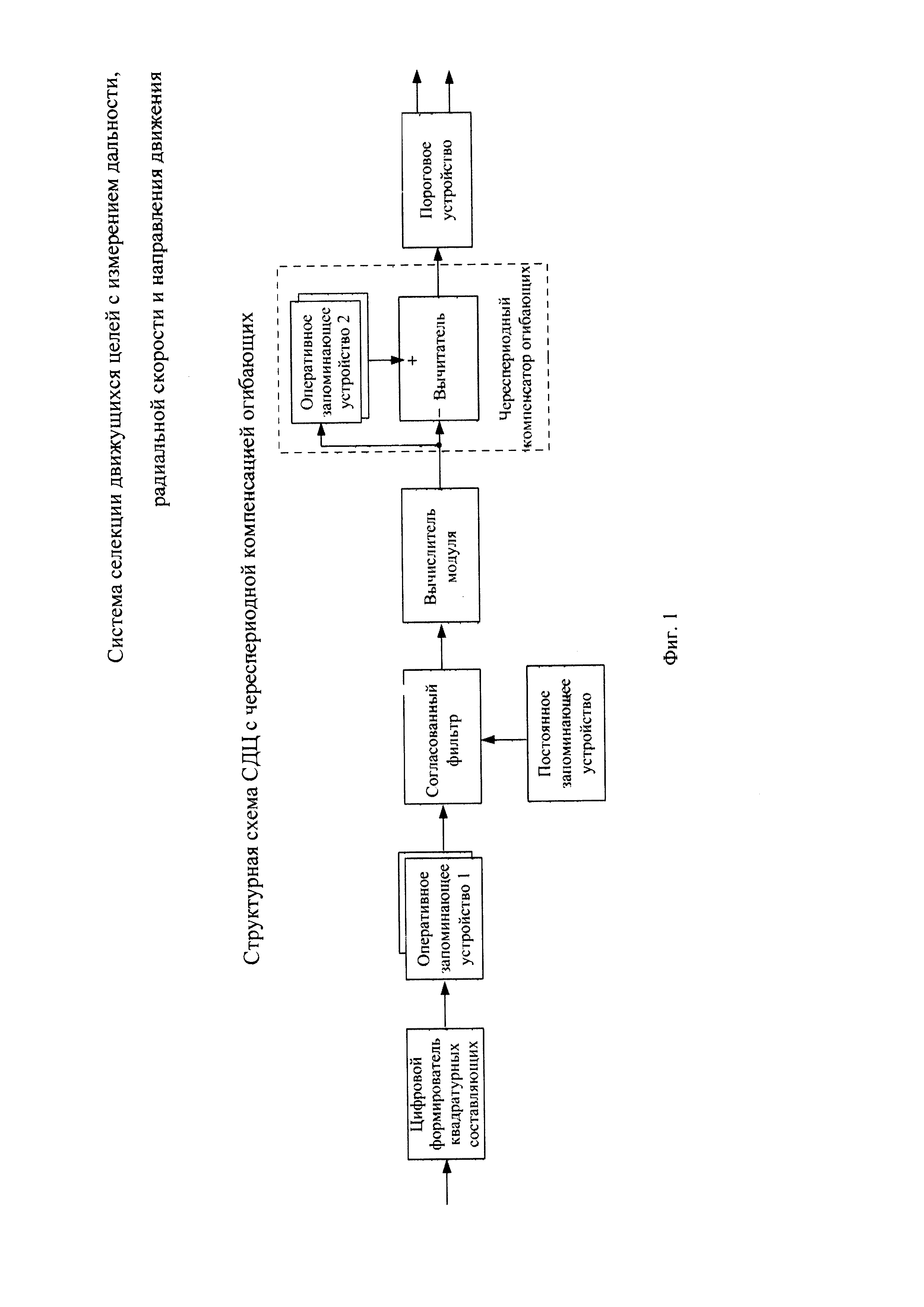
Цифровой вариант системы СДЦ с череспериодной компенсацией огибающих выходных сигналов согласованного фильтра может быть представлен в виде приведенной на фиг. 1 структурной схемы, состоящей из следующих блоков:
- цифровой формирователь квадратурных составляющих (ЦФКС), содержащий аналого-цифровой преобразователь, умножитель на комплексную последовательность, два цифровых фильтра низких частот и два устройства децимации отсчетов сигнала [6];
- двухстраничное оперативное запоминающее устройство (ОЗУ1), объем каждой страницы которого определяется числом отсчетов принятого сигнала за один период повторения зондирующих импульсов;
- согласованный фильтр (СФ), реализуемый методом «быстрой» свертки с использованием процессора быстрого преобразования Фурье (БПФ), умножителя и процессора обратного БПФ [7];
- постоянное запоминающее устройство (ПЗУ), в котором хранятся передаточные функции СФ для ЛЧМ сигналов с возрастающей H1(k) и убывающей H2(k) мгновенной частотой;
- вычислитель модуля (ВМ), осуществляющий выделение огибающей сигнала;
- череспериодный компенсатор огибающих (ЧПКО), состоящий из двухстраничного ОЗУ 2, объем каждой страницы которого определяется числом отсчетов огибающей сжатого сигнала за один период повторения, и вычислителя разности модулей выходных сигналов СФ;
- пороговое устройство (ПУ).
Работа системы СДЦ ясна из приведенной структурной схемы. Прототип обладает теми же недостатками, что и рассмотренные аналоги.
В прототипе нет технического решения, позволяющего формировать полную информацию обо всех параметрах движения цели, т.е. получать технический результат системы - осуществлять СДЦ с одновременным определением дальности, скорости и направления движения объектов.
Предлагаемое изобретение направлено на преодоление указанных недостатков прототипа и аналогов.
В основу изобретения поставлена задача, заключающаяся в создании системы СДЦ, позволяющей одновременно с селекцией движущихся целей измерять их дальность, радиальную скорость и направление движения.
Указанный технический результат достигается тем, что в известную систему СДЦ с ЧПКО, содержащую последовательно соединенные ЦФКС, ОЗУ, СФ с подключенным ПЗУ, ВМ и ЧПКО, введены вычислители временного положения (ВВП) максимума и минимума, сумматор и вычитатель, вычислители дальности (ВД), радиальной скорости (ВРС) и направления движения (ВНД); входы ВВП максимума и минимума соединены с выходом ЧПКО, а выходы подключены ко входам сумматора и вычитателя; выход сумматора связан со входом ВД, а выход вычитателя со входами ВРС и ВНД, второй вход которого соединен со входом ПЗУ и выходом сигнала управления РЛС типом зондирующего ЛЧМ сигнала.
Благодаря введению в известную систему СДЦ с ЧПКО совокупности существенных отличительных признаков предлагаемая система СДЦ обеспечивает технический результат изобретения - возможность осуществлять СДЦ с одновременным определением дальности, скорости и направления движения объектов.
Сущность предлагаемого изобретения поясняется структурной схемой, приведенной на фиг. 2, где обозначено:
1 - цифровой формирователь квадратурных составляющих;
2 - оперативное запоминающее устройство;
3 - согласованный фильтр;
4 - вычислитель модуля;
5 - череспериодный компенсатор огибающих;
6 - постоянное запоминающее устройство;
7 - вычислитель временного положения максимума;
8 - вычислитель временного положения минимума;
9 - сумматор;
10 - вычитатель;
11 - вычислитель дальности;
12 - вычислитель радиальной скорости;
13 - вычислитель направления движения.
Система СДЦ с измерением дальности, радиальной скорости и направления движения объекта работает следующим образом.
Принятый отраженный от цели сигнал  с выхода усилителя промежуточной частоты РЛС, представляющий собой периодическую последовательность ЛЧМ радиоимпульсов с череспериодным изменением знака девиации частоты, подается в ЦФКС 1, устройство и принцип работы которого подробно описаны в [6]. В ЦФКС сигнал преобразуется в цифровые отсчеты
с выхода усилителя промежуточной частоты РЛС, представляющий собой периодическую последовательность ЛЧМ радиоимпульсов с череспериодным изменением знака девиации частоты, подается в ЦФКС 1, устройство и принцип работы которого подробно описаны в [6]. В ЦФКС сигнал преобразуется в цифровые отсчеты  комплексной огибающей (КО) входного сигнала с периодом дискретизации T.
комплексной огибающей (КО) входного сигнала с периодом дискретизации T.
Отсчеты КО поступают в двухстраничное ОЗУ 2, обеспечивающее режим работы РЛС в реальном масштабе времени с запаздыванием на один период излучения, равный N периодам дискретизации Т. В течение нечетных периодов (начиная с первого) излучения РЛС в первую страницу ОЗУ2 записываются отсчеты КО принятого ЛЧМ сигнала с положительной девиацией частоты, а в течение четных периодов излучения отсчеты принятого ЛЧМ сигнала с отрицательной девиацией частоты поступают во вторую страницу ОЗУ 2. При этом во время четных зондирований эхосигналы  , предварительно записанные в первую страницу ОЗУ 2, подаются в СФ 3 с передаточной функцией H1(k) для согласованной обработки ЛЧМ сигналов с положительным знаком девиации частоты, а при нечетных зондированиях эхосигналы , предварительно записанные во вторую страницу ОЗУ 2, поступают в СФ 3 с передаточной функцией H2(k) для согласованной обработки ЛЧМ сигналов с отрицательной девиацией частоты. Передаточные функции H1(k) и H2(k) хранятся в ПЗУ6 и синхронно с соответствующим излучением по командам управления, поступающим из РЛС, подаются в СФ 3.
, предварительно записанные в первую страницу ОЗУ 2, подаются в СФ 3 с передаточной функцией H1(k) для согласованной обработки ЛЧМ сигналов с положительным знаком девиации частоты, а при нечетных зондированиях эхосигналы , предварительно записанные во вторую страницу ОЗУ 2, поступают в СФ 3 с передаточной функцией H2(k) для согласованной обработки ЛЧМ сигналов с отрицательной девиацией частоты. Передаточные функции H1(k) и H2(k) хранятся в ПЗУ6 и синхронно с соответствующим излучением по командам управления, поступающим из РЛС, подаются в СФ 3.
Полученные отсчеты  КО сжатого сигнала с выхода СФ 3 подаются на вход ВМ 4, на выходе которого формируются отсчеты амплитудной огибающей КО сжатого сигнала
КО сжатого сигнала с выхода СФ 3 подаются на вход ВМ 4, на выходе которого формируются отсчеты амплитудной огибающей КО сжатого сигнала  в соответствии с выражением
в соответствии с выражением
 (1)
(1)
Известно [8, 9], что при отражении ЛЧМ сигнала от движущейся цели, имеющей радиальную скорость  относительно антенны, максимум амплитудной огибающей сжатого сигнала имеет запаздывание
относительно антенны, максимум амплитудной огибающей сжатого сигнала имеет запаздывание
 , (2)
, (2)
где  - запаздывание, определяемое расстоянием до цели;
- запаздывание, определяемое расстоянием до цели;
DR - дальность до цели;
c - скорость распространения сигнала;
 - запаздывание, определяемое радиальной скоростью; (3)
- запаздывание, определяемое радиальной скоростью; (3)
 - длительность импульса;
- длительность импульса;
 - девиация частоты ЛЧМ сигнала;
- девиация частоты ЛЧМ сигнала;
 - длина волны излучаемого сигнала;
- длина волны излучаемого сигнала;
 - несущая частота излучаемого сигнала;
- несущая частота излучаемого сигнала;
 - радиальная скорость цели (скорость положительная, если цель удаляется).
- радиальная скорость цели (скорость положительная, если цель удаляется).
Из выражения (3) следует, что знак смещения  максимума амплитудной огибающей сжатого сигнала относительно момента определяется знаком
максимума амплитудной огибающей сжатого сигнала относительно момента определяется знаком  и знаком .
и знаком .
Отсчеты поступают на вход ЧПКО 5, содержащего двухстраничное ОЗУ, работающее аналогично ОЗУ 2 и выполняющее роль линии задержки на один период повторения сигнала, а также вычитателя, осуществляющего вычитание огибающей поступившего сигнала из огибающей задержанного на период повторения сжатого сигнал.
Полученный в ЧПКО 5 разностный сигнал огибающих выходных сигналов СФ 3  подается на входы ВВП максимума 7 и ВВП минимума 8 разностного сигнала. Величина nмакс с выхода ВВП максимума 7, равная запаздыванию относительно момента излучения максимума разностного сигнала, выраженному в периодах дискретизации, и величина nмин с выхода ВВП минимума 8, равная запаздыванию минимума разностного сигнала, выраженному в периодах дискретизации, поступают на входы сумматора 9 и вычислителя разности (вычитателя) 10.
подается на входы ВВП максимума 7 и ВВП минимума 8 разностного сигнала. Величина nмакс с выхода ВВП максимума 7, равная запаздыванию относительно момента излучения максимума разностного сигнала, выраженному в периодах дискретизации, и величина nмин с выхода ВВП минимума 8, равная запаздыванию минимума разностного сигнала, выраженному в периодах дискретизации, поступают на входы сумматора 9 и вычислителя разности (вычитателя) 10.
Величина (nмакс + nмин) с выхода сумматора подается на вход ВД 11, в котором производится ее умножение на константу  , значение которой хранится в памяти ВД 11, в результате на выходе получается оценка дальности DR до цели:
, значение которой хранится в памяти ВД 11, в результате на выходе получается оценка дальности DR до цели:
 (4)
(4)
Так как девиации частот ЛЧМ импульсов в нечетных и четных периодах зондирования равны по модулю и противоположны по знаку, то выражение (4) соответствует запаздывании , равному среднему значению запаздываний максимального и минимального отсчетов разностного сигнала, поэтому оценка дальности (4) не содержит ошибки (3), определяемой скоростью цели.
Из выражения (3) следует, что модуль радиальной скорости движущейся цели можно найти следующим образом:
 (5)
(5)
Также из (3) следует, что, если радиальная скорость цели положительна (цель удаляется), то максимум разностного сигнала в нечетном периоде излучения будет позже во времени, чем минимум ( ), и наоборот, если радиальная скорость отрицательна (цель приближается), то минимум разностного сигнала в нечетном периоде излучения будет отставать от максимума (
), и наоборот, если радиальная скорость отрицательна (цель приближается), то минимум разностного сигнала в нечетном периоде излучения будет отставать от максимума ( ). Таким образом, в нечетном периоде излучения знак радиальной скорости цели, характеризующий ее направление движения, будет соответствовать знаку разности (
). Таким образом, в нечетном периоде излучения знак радиальной скорости цели, характеризующий ее направление движения, будет соответствовать знаку разности ( ).
).
Величина (nмакс - nмин) с выхода вычитателя 10 подается на входы ВРС 12 и ВНД 13. В ВРС цели находится величина радиальной скорости цели с помощью определения модуля и умножения входной величины на постоянный коэффициент  , значение которого предварительно рассчитывается и хранится в памяти ВРС 12.
, значение которого предварительно рассчитывается и хранится в памяти ВРС 12.
В ВНД 13 в соответствии с командами управления, поступающими из РЛС, в нечетные периоды излучения ЛЧМ сигналов формируется на выходе значение «+1», если знак разности nмакс - nмин положителен (цель удаляется) или значение «0», если знак разности nмакс - nмин отрицателен (цель приближается). В четные периоды излучения сигнал на выходе ВНД 13 не формируется.
Функционирование системы поясняют временные диаграммы, приведенные на фиг. 3. На временной диаграмме изображен (начиная с первого периода излучения) принятый эхосигнал и излучаемый ЛЧМ импульс (пунктиром).
Правильность функционирования предлагаемой системы СДЦ с одновременным измерением дальности, радиальной скорости и направления движения была проверена моделированием.
Результаты моделирования подтверждают, что совокупность известных операций, примененных в описанном изобретении, обеспечивает достижение заявленных технических результатов.
Таким образом, изобретение представляет собой систему селекции движущихся целей, обеспечивающую одновременное измерение дальности, радиальной скорости и направления движения объектов.
Источники информации
1. Пат. 3225349 США, МПК G01S13/00, G01S13/28. Moving target indicating radar system; Заявлено 17.12.1962; Опубл. 21.12.1965.
2. Пат. 738450 СССР, МПК G01R23/16. Устройство для обработки радиолокационных сигналов / Литюк В.И.; Заявлено 19.04.1977; Опубл. 27.01.1996.
3. Пат. 5870054 США, МПК G01S 13/528. Moving target indicator with no blind speeds; Заявлено 10.12.1982; Опубл. 09.02.1999.
4. Маркович И.И., Копытин А.П., Марьев А.А. Цифровая обработка сигналов в радиолокационном комплексе, использующем зондирующие сигналы с линейной частотной модуляцией и изменяющимся знаком девиации частоты // Матер. III Всероссийской науч.-тех. конф. «Суперкомпьютерные технологии» (СКТ-2014). - Т. 2. - Ростов-на-Дону: Изд-во ЮФУ, 2014. - С. 235-239.
5. Маркович И.И. Алгоритм селекции движущихся целей с череспериодной компенсацией огибающих сигналов. Радиолокационные системы специального и гражданского назначения. 2013-2015 / под ред. Ю.И. Белого. - М.: Радиотехника, 2016.
6 Маркович И.И. Реализация алгоритмов цифрового формирования квадратурных составляющих в локационных комплексах различного назначения // Вестник компьютерных технологий.- 2006. - № 6. - С. 16-21.
7 Маркович И.И. Цифровая обработка сигналов в системах и устройствах: монография / И.И. Маркович. - Ростов н/Д: Изд-во ЮФУ: 2012. - 236 с.
8. Ч. Кук, М. Бернфельд. Радиолокационные сигналы. Пер. с английского под ред. В.С. Кельзона. - М. Изд-во «Советское радио», 1971. - 568 с.
9. Трухачев А.А. Радиолокационные сигналы и их применения. - М.: Воениздат, 2005. - 320 с.
Система селекции движущихся целей с измерением дальности, радиальной скорости и направления движения, включающая цифровой формирователь квадратурных составляющих (ЦФКС), на вход которого подают отраженный сигнал, представляющий собой последовательность радиоимпульсов с линейной частотной модуляцией, причем знак девиации частоты чередуют через каждый период излучения; двухстраничное оперативное запоминающее устройство (ОЗУ), вход которого подключен к выходу ЦФКС; согласованный фильтр (СФ), первый вход которого подключен к выходу ОЗУ, а второй – к выходу постоянного запоминающего устройства (ПЗУ), вход которого подключен к источнику управляющего сигнала; вычислитель модуля (ВМ), вход которого подключен к выходу СФ; череспериодный компенсатор огибающих (ЧПКО), вход которого подключен к выходу ВМ; отличающаяся тем, что содержит вычислитель временного положения (ВВП) минимума сигнала, вход которого подключен к выходу ЧПКО; ВВП максимума сигнала, вход которого подключен к выходу ЧПКО; сумматор, первый вход которого подключен к выходу ВВП максимума, а второй – к выходу ВВП минимума; вычитатель, первый вход которого подключен к выходу ВВП максимума, а второй – к выходу ВВП минимума; вычислитель дальности, вход которого подключен к выходу сумматора, а с выхода получают значение дальности до цели; вычислитель радиальной скорости, вход которого подключен к выходу вычитателя, а с выхода получают значение модуля радиальной скорости цели, а также вычислитель направления движения, первый вход которого подключен к выходу вычитателя, второй – к источнику управляющего сигнала; с выхода вычислителя направления движения получают знак радиальной скорости цели.
Способ сигнализации приводнения и взлета с водной поверхности самолета-амфибии
Способ изготовления сегнетоэлектрического керамического материала на основе феррита висмута
Сегнетоэлектрический керамический материал
Пьезоэлектрический керамический материал
Пассивный беспроводный датчик на поверхностных акустических волнах для измерения концентрации моноокиси углерода
Цифровой способ измерения параметров пьезоэлектрических элементов
Способ дифференциальной диагностики стадий гонартроза
Пьезоэлектрический керамический материал
Способ измерения расстояния между объектами
Пьезоэлектрический керамический материал
Способ сигнализации приводнения и взлета с водной поверхности самолета-амфибии
Способ изготовления сегнетоэлектрического керамического материала на основе феррита висмута
Сегнетоэлектрический керамический материал
Пьезоэлектрический керамический материал
Пассивный беспроводный датчик на поверхностных акустических волнах для измерения концентрации моноокиси углерода
Цифровой способ измерения параметров пьезоэлектрических элементов
Способ дифференциальной диагностики стадий гонартроза
Пьезоэлектрический керамический материал
Способ измерения расстояния между объектами
Пьезоэлектрический керамический материал

