Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА ПОВЫШЕННОЙ ЖИВУЧЕСТИ
Вид РИД
Изобретение
Предлагаемое изобретение относится к электротехнике, а именно к автономным системам электропитания (СЭП) космических аппаратов (КА), использующим в качестве первичных источников энергии батареи фотоэлектрические (БФ), а в качестве накопителей энергии - аккумуляторные батареи (АБ).
Неотъемлемой частью современной СЭП космических аппаратов помимо БФ и АБ является бортовая автоматика, например, комплекс автоматики и стабилизации напряжения (КАС) для СЭП КА. КАС стабилизирует напряжение на выходе СЭП в границах диапазона токов нагрузки, согласует работу БФ и АБ, передает информацию о параметрах СЭП в бортовой комплекс управления (БКУ) и бортовую систему телеметрических измерений. К числу мероприятий, направленных на улучшение удельных характеристик СЭП, следует отнести внедрение в практику мультиплексного канала обмена (МКО) для осуществления электрической и информационной связей между БКУ и КАС СЭП. Однако применение сложнейшей электронной аппаратуры в составе СЭП КА с большим сроком активного существования, как правило, приводит к повышению вероятности возникновения в ней отказов или единичных сбоев, в том числе таких, как передача из КАС в бортовое программное обеспечение (БПО) СЭП из состава БКУ искаженной (недостоверной) информации, не соответствующей реальному состоянию системы.
Одной из главных задач БПО СЭП является периодический контроль суммарной глубины разряда АБ. В случае превышения одного из заранее определенных порогов глубины разряда АБ программы СЭП должны производить включение программы режима управления при неисправностях для перевода изделия в ориентированный дежурный полет (ОДП) или при большем разряде в режим дежурной ориентации (РДО) для отключения части бортовой аппаратуры.
Известен способ управления системой электропитания космического аппарата (Кирилин А.Н., Ахметов Р.Н., Сторож А.Д., Аншаков Г.П. Космическое аппаратостроение. Государственный научно-производственный ракетно-космический центр «ЦСКБ-Прогресс», г. Самара, 2011, аналог), заключающийся в управлении зарядными и разрядными устройствами в зависимости от входного и выходного напряжений системы электропитания; контроле степени заряженности аккумуляторных батарей; запрете на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной аккумуляторной батареи и снятии этого запрета при снижении уровня заряженности; запрете на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности (или напряжения) данной аккумуляторной батареи и снятии этого запрета при повышении уровня заряженности (напряжения) данной аккумуляторной батареи.
Недостатком аналога является то, что он не позволяет повысить надежность и живучесть функционирования СЭП в случае нарушения по какой-либо причине энергобаланса, с вытекающими отсюда негативными последствиями.
Известен способ управления автономной системой электропитания космического аппарата (патент РФ на изобретение №2467449, прототип), содержащей солнечную батарею и n аккумуляторных батарей, стабилизатор напряжения, включенный между солнечной батареей и нагрузкой, и по n зарядных и разрядных устройств, заключающийся в том, что управляют стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного и выходного напряжений системы электропитания; контролируют степень заряженности аккумуляторных батарей; вводят запрет на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной аккумуляторной батареи и снимают этот запрет при снижении уровня заряженности; вводят запрет на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной аккумуляторной батареи и снимают этот запрет при повышении уровня заряженности данной аккумуляторной батареи; контролируют выходное напряжение системы электропитания с помощью порогового датчика; при аварийном разряде нескольких m (m≤n) аккумуляторных батарей до минимального уровня заряженности формируют управляющий сигнал в бортовой комплекс управления космического аппарата для отключения части бортовой аппаратуры и запоминают его; при аварийном разряде всех n работающих аккумуляторных батарей до минимального уровня заряженности снимают запрет на работу всех разрядных устройств; в случае если после запоминания управляющего сигнала выходное напряжение системы снижается до заданного порогового значения, запрещают работу всех разрядных устройств; сброс запоминания управляющего сигнала производят после заряда всех аккумуляторных батарей или по внешней разовой команде.
Недостатком прототипа является то, что у него отсутствует возможность отражать недостоверную (сбойную) информацию об уровнях заряженности АБ на текущий момент, по результатам анализа которых могут формироваться управляющие воздействия в бортовом комплексе управления на изменение режимов функционирования КА, что приводит к снижению надежности и живучести функционирования СЭП.
Задачей предлагаемого изобретения является повышение надежности и живучести СЭП и КА в целом.
Указанная задача решается тем, что в способе управления системой электропитания космического аппарата повышенной живучести, содержащей фотоэлектрическую батарею и n аккумуляторных батарей и по n зарядных и разрядных устройств, заключающемся в управлении зарядными и разрядными устройствами в зависимости от освещенности БФ, степени заряженности всех АБ, входного и выходного напряжения системы электропитания; введении запрета на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной АБ и снятии этого запрета при повышении уровня заряженности данной АБ; формировании управляющего сигнала в бортовой комплекс управления КА для отключения части бортовой аппаратуры при аварийном разряде нескольких m (m≤n) АБ до минимального уровня заряженности; запрете работы всех разрядных устройств, если выходное напряжение СЭП снижается до заданного порогового значения; сбросе запоминания управляющего сигнала по запрету всех разрядных устройств после заряда всех АБ до заданного уровня заряженности, посредством бортовой программы СЭП из состава бортового программного обеспечения (БПО) бортового комплекса управления с заданной периодичностью считывают параметры СЭП, в том числе уровни заряженности АБ; при этом считывание осуществляют из КАС по мультиплексному каналу обмена; используя параметры СЭП, вычисляют суммарную глубину разряда всех АБ и производят сравнение вычисленной суммарной глубины разряда с заданными в бортовой программе СЭП пороговыми для формирования управляющего сигнала в бортовом комплексе управления значениями; в случае превышения порогового значения глубины разряда через временную уставку повторяют считывание параметров СЭП, причем продолжительность уставки выбирают, сравнимую с периодом обновления информации о параметрах СЭП; после повторного вычисления суммарной глубины разряда АБ выполняют вновь сравнение ее с пороговыми значениями суммарной глубины разряда и в зависимости от полученного их соотношения с помощью алгоритма СЭП формируют/не формируют управляющий сигнал в бортовом комплексе управления по смене режима функционирования КА.
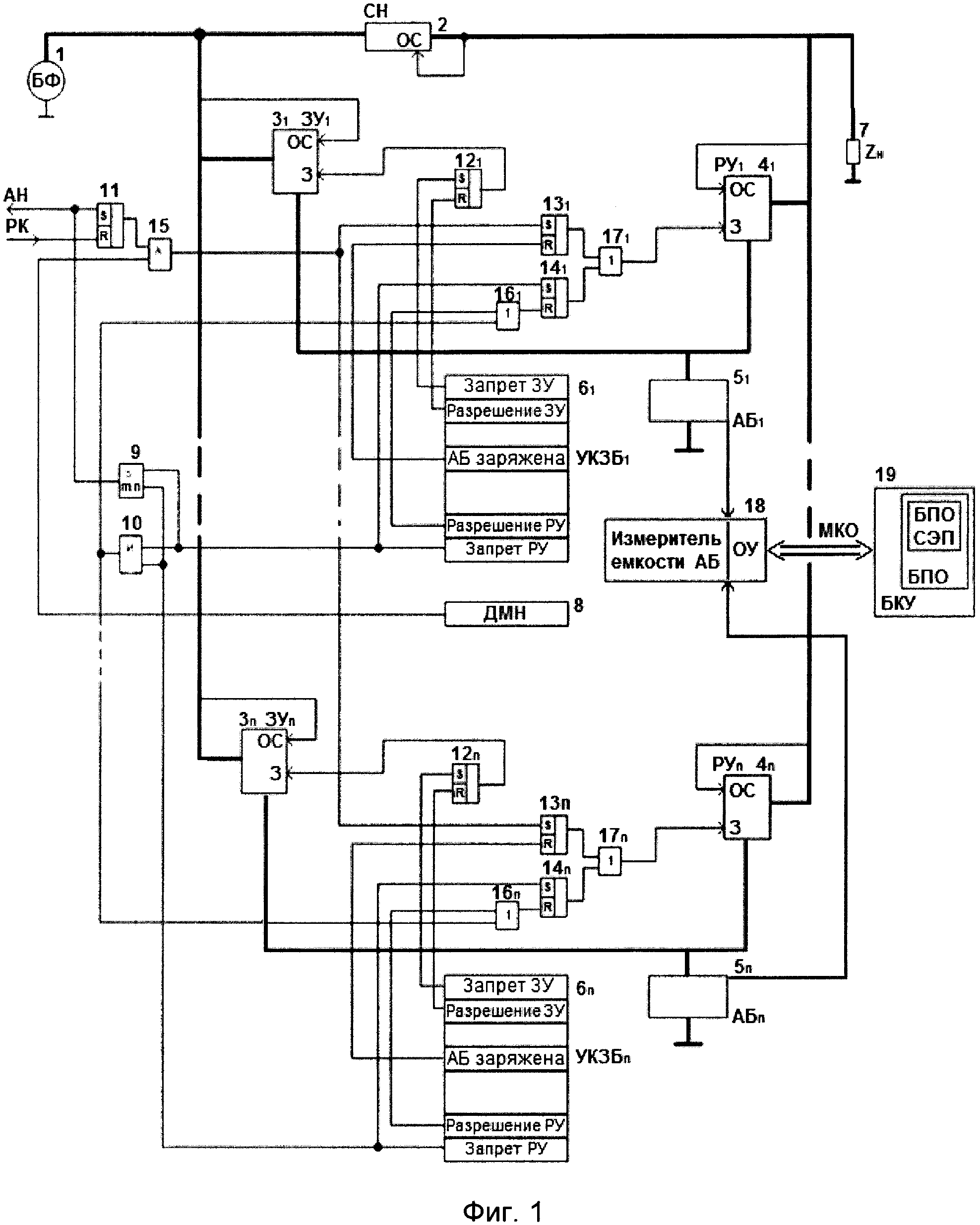
Пример функциональной схемы СЭП, в которой реализуется предлагаемый способ, приведен на фиг. 1, где обозначено:
1 - батарея фотоэлектрическая;
2 - стабилизатор напряжения (СН) с экстремальным регулятором мощности (ЭРМ) БФ;
31…3n - зарядные устройства (ЗУ);
41…4n - разрядные устройства (РУ);
51…5n - аккумуляторные батареи;
61…6n - устройства контроля степени заряженности АБ (УКЗАБ);
ОС - вход обратной связи;
3 - вход запрета работы;
7 - нагрузка СЭП (бортовая аппаратура);
8 - датчик пороговый минимального напряжения;
9 - логический элемент m из n;
10 - логический элемент И;
11, 121…12n, 131…13n, 141…14n - R-S триггеры;
15 - логический элемент И;
161…16n, 171…17n - логические элементы ИЛИ,
18 - измеритель емкости АБ и оконечное устройство (ОУ)
19 - БКУ с БПО, включая БПО СЭП.
Управление автономной системой электропитания космического аппарата осуществляют следующим образом (фиг. 1). СЭП производится непрерывное управление стабилизатором напряжения, зарядными и разрядными устройствами, а также панелями солнечных батарей в зависимости от освещенности БФ, входного (напряжение БФ) и выходного напряжений СЭП. При этом зарядные устройства обеспечивают заряд АБ 51…5n, а СН и РУ обеспечивают питание бортовой аппаратуры (БА) 7. Цепи непрерывного управления (обратной связи - ОС) ЗУ подключены к шине БФ 1, а цепи непрерывного управления (ОС) СН и РУ подключены к выходной шине СЭП (на вход БА 7).
В зависимости от степени заряженности АБ производится запрет или разрешение работы ЗУ и РУ. При достижении максимальной степени заряженности конкретной АБ сигнал с выхода "Запрет ЗУ" ее устройства контроля степени заряженности АБ (61…6n на фиг. 1), с помощью R-S триггера (121…12n) запрещает работу ее ЗУ. После разряда АБ до некоторого заданного уровня, этот запрет снимают сигналом с выхода "Разрешение ЗУ" УКЗАБ.
При достижении минимального уровня заряженности конкретной АБ сигнал с выхода "Запрет РУ" ее УКЗАБ (61…6n на чертеже), проходя через R-S триггер (141…14n) и логический элемент ИЛИ (171…17n) поступает на вход запрета работы соответствующего РУ. Эта АБ переводится в режим хранения. После заряда данной АБ до некоторого заданного уровня этот запрет снимают сигналом с выхода "Разрешение РУ" УКЗАБ (логические элементы ИЛИ 161…16n, R-S триггеры 141…14n, логические элементы ИЛИ 171…17n).
В случае нештатной ориентации солнечных батарей КА на Солнце происходит нарушение энергобаланса в СЭП. Сигналы с выходов "Запрет РУ" всех УКЗАБ поступают на входы логических элементов 9 (m из n) и 10 (логический элемент И).
При аварийном разряде нескольких m (m≤n) аккумуляторных батарей до минимального уровня заряженности на выходе логического элемента 9 формируется управляющий сигнал аварийной нагрузки («АН»), который выдается в бортовой комплекс управления для отключения части БА. Этот сигнал запоминается на R-S триггере 11. Запоминание снимается по внешней разовой команде (РК). При отключении БКУ части БА снижается скорость расходования энергии АБ. Остается подключенной часть БА - приборы систем терморегулирования, телеметрии и других необходимых систем. Эти приборы обеспечивают температурные режимы и контроль параметров БА 7. Появляется возможность более длительное время питать нагрузку и продолжать работы по выводу КА из нештатной ситуации. Таким образом, обеспечивается возможность использования средств бортового комплекса управления для адаптивного изменения схемы питания БА 7 в зависимости от текущего состояния энергетических возможностей СЭП.
При аварийном разряде всех n работающих АБ 51…5n до минимального уровня заряженности на выходе логического элемента 10 появляется сигнал, который проходя через логические элементы ИЛИ 161…16n, R-S триггеры 141…14n, логические элементы ИЛИ 171…17n снимает запрет на работу всех разрядных устройств. Далее, если аварийная ситуация продолжается, происходит синхронный разряд на оставшуюся часть нагрузки всех АБ 51…5n. Имеющаяся емкость АБ используется полностью.
При дальнейшем аварийном разряде выходное напряжение системы снижается до заданного порогового значения, срабатывает датчик пороговый минимального напряжения 8, а поскольку этому предшествовало запоминание управляющего сигнала «АН» на R-S триггере 11, то его сигнал пройдя через логический элемент И 15 и R-S триггеры (131…13n) и логические элементы ИЛИ (171…17n) запрещает работу всех разрядных устройств и логическим уровнем на входах элементов ИЛИ (171…17n) блокирует прохождение управляющих сигналов, разрешающих работу разрядным устройствам по сигналам об уровне заряженности от УКЗАБ 61…6n.Запоминание управляющего сигнала «АН» обеспечивает защиту от обесточивания БА 7 при ложном срабатывании датчика порогового минимального напряжения 8, или при его срабатывании в случае перегрузки по выходным шинам СЭП, не связанной с нарушением ориентации БФ 1 и аварийным разрядом АБ.
После восстановления ориентации БФ 1 на Солнце производят питание оставшейся включенной части БА 7 от БФ 1 через стабилизатор напряжения. Напряжение на выходе СЭП, обеспечиваемое СН, определяется соотношением мощности нагрузки 7, подключенной к выходным шинам СЭП, и мощности, генерируемой БФ 1 и определяемой степенью ее освещенности. Напряжение БФ 1 и, следовательно, напряжение БА 7 может произвольно меняться в течение неопределенного времени, до полного восстановления ориентации, в пределах от 0 до номинального значения. Включенные приборы, естественно, при этом должны сохранять свою работоспособность. Избыток мощности БФ 1 идет на заряд АБ 51…5n.
Поскольку цепи непрерывного управления (обратной связи - ОС) ЗУ подключены к шине БФ, а цепи непрерывного управления (ОС) СН подключены к выходной шине СЭП, в первую очередь будет обеспечиваться питание БА 7, то есть включенные приборы системы терморегулирования, систем телеметрии, и других необходимых систем, которые обеспечат необходимые температурные режимы зарядных устройств и аккумуляторных батарей, а также контроль параметров. При нарушении ориентации БФ 1 на Солнце или уходе КА в тень питание всей БА 7 и заряд АБ 51…5n прекращается. Разряд АБ 51…5n не производится, так как сигнал «Запрет разряда» не снят.
При заряде какой-либо из аккумуляторных батарей 51…5n до некоторого значения емкости сигнал с выхода УКЗАБ «АБ заряжена», пройдя через R-S триггер (131…13n) и логический элемент ИЛИ (171…17n) снимает запрет на работу своего разрядного устройства и блокировку прохождение управляющих сигналов, разрешающих работу разрядным устройствам по сигналам об уровне заряженности от УКЗАБ 61…6n. СЭП переходит в штатный режим работы после заряда всех АБ 51…5n или по РК.
Для автономного контроля и управления СЭП, т.е. без вмешательства с наземного комплекса управления, в составе БКУ 19 в БПО используют алгоритмы СЭП (БПО СЭП), которые получают необходимую информацию из СЭП по дублированному мультиплексному каналу обмена. Для формирования и передачи информации о состоянии СЭП, включая значения емкостей АБ, в СЭП применяют измеритель емкости АБ и оконечное устройство (ОУ) 18. БПО СЭП периодически считывает по МКО из ОУ СЭП информацию об уровнях заряженности АБ, подготовленную измерителем емкости АБ.
Применение предлагаемого способа управления системой электропитания КА позволяет максимально использовать запасенную емкость АБ и обеспечить питание бортового комплекса управления для прекращения или сдерживания процесса развития аварийной ситуации, а также не допустить необратимого разряда АБ 51…5n в случае нарушения энергобаланса. Таким образом, применение предлагаемого способа управления электропитания КА повышенной живучести позволяет существенно уменьшить вероятность возникновения аварийной ситуации из-за нарушения энергобаланса.
Повышение надежности и живучести СЭП КА осуществляется путем использования БПО СЭП.
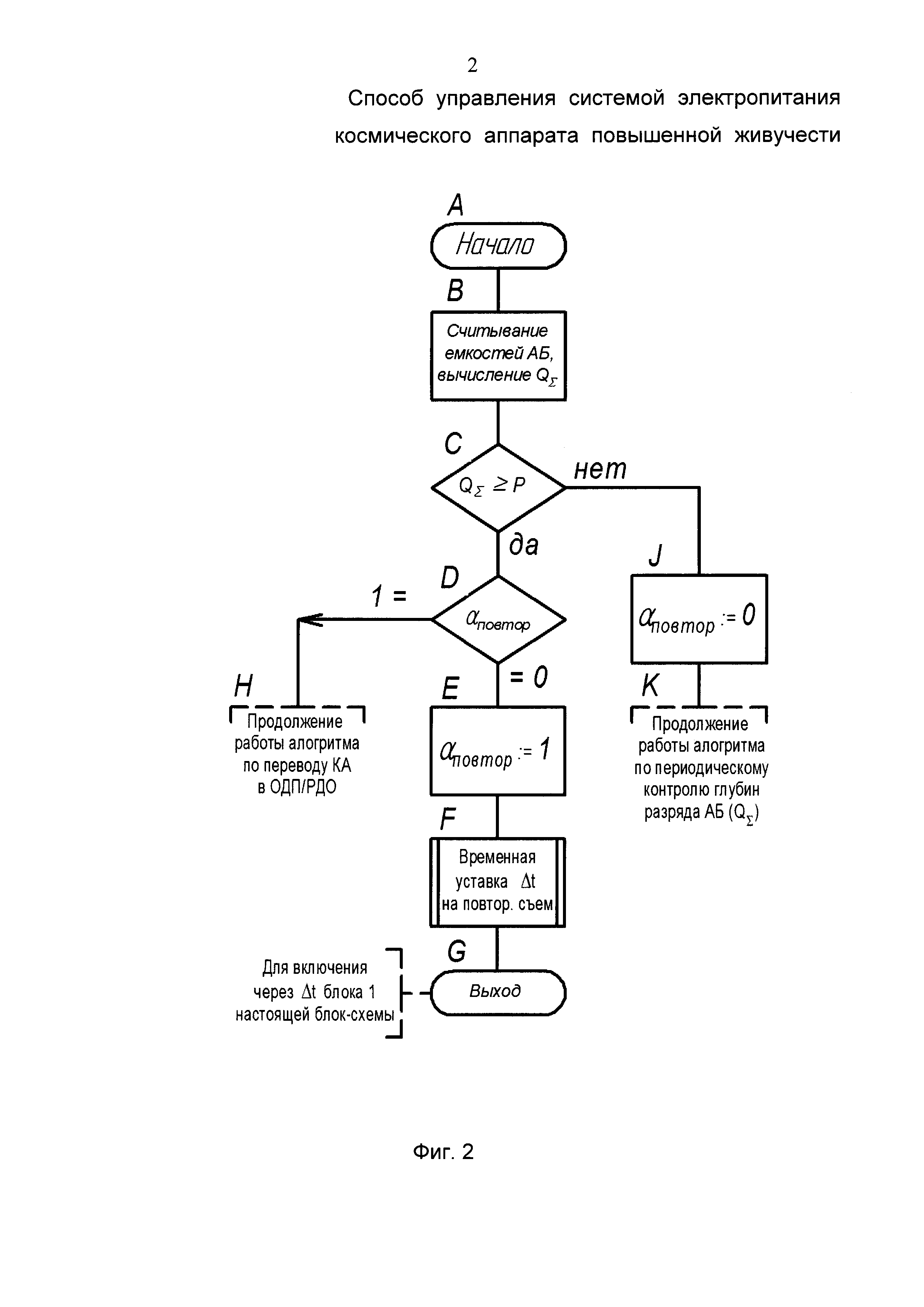
На фиг. 2 показан пример блок-схемы логики управления БПО СЭП с предварительной обработкой значений параметров на предмет парирования получения сбойной информации о глубинах разряда АБ из КАС.
Посредством бортовой программы СЭП из состава бортового программного обеспечения бортового комплекса управления с заданной периодичностью считывают параметры СЭП, в том числе уровни заряженности АБ (блок В). Считывание осуществляют из КАС по мультиплексному каналу обмена. Используя параметры СЭП, вычисляют Q∑ - суммарную глубину разряда всех АБ (блок В), как разность между полным и текущим уровнями заряда АБ, и производят сравнение (блок С) вычисленной суммарной глубины разряда с заданным пороговым для формирования управляющего сигнала значением Р (по переводу КА в ОДП). При Q∑<Р продолжают работу алгоритма по периодическому контролю суммарной глубины разряда (блок K) с обнулением программного индикатора повторного съема αповтор (блок J) (исходное значение признака αповтор - нулевое). Если Q∑ превышает пороговое значение Р, то с целью защиты изделия от несанкционированного перевода в ОДП или РДО из-за возможного получения алгоритмом СЭП сбойной информации о степенях заряженностей АБ осуществляют повторный съем обновленного массива через промежуток времени Δt (признак αповтор формируют единичным) (блоки Е, F, G, В). Если повторный съем подтверждает превышение глубины разряда порогового значения для перевода в ОДП (блоки В, С), то он считается достоверным, и выполняются действия по переводу изделия в ОДП или РДО (блоки D, Н); если повторный съем показал нормальные глубины разряда АБ, не превышающие порога ОДП (блок С), то этот съем считается правильным, а информация предыдущего съема считается недостоверной, и штатная работа продолжается без перевода в ОДП или РДО (блоки J, K).
Именно поэтому, в случае превышения порогового значения глубины разряда через временную уставку Δt, повторяют считывание параметров СЭП. Для отражения сбойной информации продолжительность уставки Δt выбирают, сравнимую с периодом обновления массивов данных о параметрах СЭП в регистрах КАС. Только в этом случае сбойная информация в массиве параметров СЭП не будет к моменту повторного (контрольного) съема фигурировать. После повторного вычисления суммарной глубины разряда АБ выполняют вновь сравнение ее с пороговыми значениями суммарной глубины разряда и в зависимости от полученного их соотношения с помощью алгоритма СЭП формируют/не формируют управляющий сигнал в БКУ по смене режима работы КА.
Условием для проверки значений емкостей АБ на достоверность принимается появление факта превышения вычисленной программой СЭП суммарной глубины разряда АБ порогового значения перевода в ОДП. Глубину разряда АБ достаточно сравнивать только с порогом перевода в ОДП, т.к. порог РДО находится ниже и поэтому в случае превышения порога РДО порог ОДП также будет превышен (с точки зрения электропотребления, штатная работа (ШР), ОДП, РДО изделия идут по убыванию, т.е. при ШР - самое большое потребление, при РДО - наименьшее среди ШР, ОДП, РДО; поэтому порог глубины разряда для перевода изделия в ОДП меньше, чем для перевода в РДО).
Проверке на достоверность («очистке») подвергаются только те уровни заряженности АБ, которые приводят к управляющим воздействиям на КА. Возможный сбой значений параметров в другой диапазон, например, в случае «зашкала» по верхним значениям емкостей АБ, перепроверке не подвергается. Предполагается, что сбои являются единичными и самоустранимыми, т.е. следующий опрос после выдержки достаточной паузы, необходимой для обновления массивов в КАС, должен показывать достоверную информацию.
Таким образом, применение предлагаемого способа управления системой электропитания КА позволяет повысить надежность и живучесть СЭП и КА в целом, так как исключаются случаи неправильного перевода изделия в режим ОДП или РДО с вытекающими негативными последствиями.
Способ управления системой электропитания космического аппарата повышенной живучести, содержащей фотоэлектрическую батарею (БФ), n аккумуляторных батарей (АБ) и по n зарядных и разрядных устройств, заключающийся в том, что управляют зарядными и разрядными устройствами в зависимости от освещенности БФ, степени заряженности всех АБ, входного и выходного напряжения системы электропитания (СЭП); вводят запрет на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной АБ и снимают этот запрет при снижении уровня заряженности данной АБ; вводят запрет на работу соответствующего разрядного устройства при достижении установленного минимального уровня заряженности данной АБ и снимают этот запрет при повышении уровня заряженности данной АБ; формируют управляющий сигнал в бортовой комплекс управления (БКУ) космического аппарата (КА) для отключения части бортовой аппаратуры при аварийном разряде нескольких m (m≤n) АБ до минимального уровня заряженности; запрещают работу всех разрядных устройств, если выходное напряжение СЭП снижается до заданного порогового значения; производят сброс запоминания управляющего сигнала по запрету всех разрядных устройств после заряда всех АБ до заданного уровня заряженности, отличающийся тем, что посредством бортовой программы СЭП из состава бортового программного обеспечения (БПО) бортового комплекса управления с заданной периодичностью считывают параметры СЭП, в том числе уровни заряженности АБ; при этом считывание осуществляют из комплекса автоматики и стабилизации напряжения по мультиплексному каналу обмена; используя параметры СЭП, вычисляют суммарную глубину разряда всех АБ и производят сравнение вычисленной суммарной глубины разряда с заданными в бортовой программе СЭП пороговыми значениями для формирования в бортовом комплексе управления управляющего сигнала; в случае превышения порогового значения глубины разряда через временную уставку повторяют считывание параметров СЭП, причем продолжительность уставки выбирают сравнимую с периодом обновления информации о параметрах СЭП; после повторного вычисления суммарной глубины разряда АБ выполняют вновь сравнение ее с пороговыми значениями суммарной глубины разряда и в зависимости от полученного их соотношения с помощью алгоритма СЭП формируют/не формируют управляющий сигнал в бортовом комплексе управления по смене режима функционирования КА.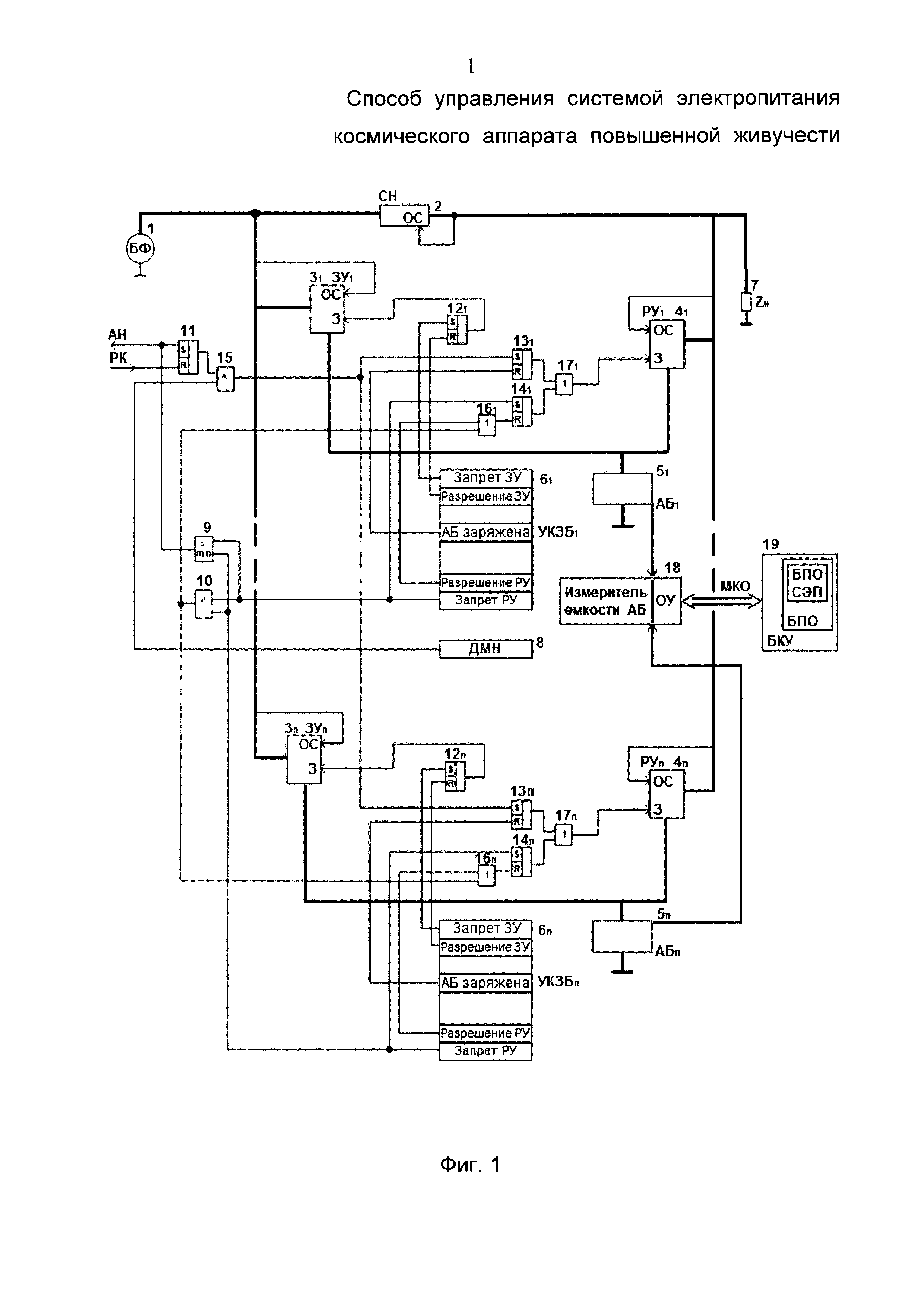
Приборная панель космического аппарата
Кассетный боеприпас
Артиллерийский осколочно-фугасный снаряд
Сопло летательного аппарата
Кран шаровой
Тренога
Солнечная батарея
Силовой блок двигательной установки ракеты-носителя
Логопериодическая антенна
Клапан
Инструментальный усилитель с периодической коррекцией дрейфа
Способ эксплуатации никель-водородных аккумуляторных батарей системы электропитания космического аппарата (варианты)
Космический аппарат дистанционного зондирования земли
Способ управления системой электропитания космического аппарата
Космический аппарат
Способ эксплуатации никель-водородных аккумуляторных батарей системы электропитания космического аппарата
Способ управления автономной системой электропитания космического аппарата
Способ эксплуатации никель-водородных аккумуляторных батарей системы электропитания модульного исполнения (варианты)
Способ управления параметрами аккумуляторов никель-водородных аккумуляторных батарей системы электропитания космического аппарата
Способ управления параметрами аккумуляторов никель-водородных аккумуляторных батарей системы электропитания космического аппарата (варианты)

